反向旋拋式油莎豆起挖裝置設計與試驗
2022-06-21 08:20:20何曉寧張學軍尚書旗王東偉
農業機械學報 2022年5期
何曉寧 張學軍 趙 壯 尚書旗 王東偉 楊 帥
(1.新疆農業大學機電工程學院,烏魯木齊 830052; 2.青島農業大學機電工程學院,青島 266109)
0 引言
油莎豆是原產于非洲及地中海沿岸國家的一種草本植物[1-2],是集油、糧、牧、飼、綠化觀賞于一體的新型經濟作物[3-4]。降低油莎豆收獲過程中能量消耗是解決油莎豆機械化收獲的關鍵問題,由于油莎豆種植土壤的差異性、環抱體在收獲過程中的運動以及碎裂等因素,阻礙了其機械化的進步[5-6],亟需對收獲機理進行探究。
近年來,國內外專家學者對于作物-土壤-機具相互作用機理進行了研究,RAHMAN等[7]利用土槽試驗研究了4種機具耕作時土壤運動和擾動情況,LIU等[8]通過不同情況下殘茬-土壤-機具的相互作用分析,對土壤破碎機理進行了研究,方會敏等[9]為進一步研究秸稈-土壤-旋耕刀的宏觀及微觀相互作用機理,利用土槽試驗和EDEM仿真驗證,分析了秸稈和土壤運動規律,丁為民等[10]進行了正、反轉旋耕的對比試驗,認為反轉旋耕可獲得良好的耕作土層,何曉寧等[11]針對油莎豆旋耕挖掘方式進行反旋運動學分析,建立了旋耕刀與油莎豆團聚體離散元模型,設計了一種反旋刀片,結合標準旋耕刀對比試驗,證明反旋挖掘具有降阻作用。
本文利用離散元方法,構建旋耕刀-土壤-油莎豆根系土壤環抱體的離散元模型,研究不同土層下油莎豆根系土壤環抱體的運動規律與破碎機理,設計一種反向旋拋式油莎豆起挖裝置,并對不同結構參數的起挖裝置進行試驗,以期為油莎豆挖掘裝置的研發提供理論參考。
1 結構與工作原理
以牽引式反轉旋耕裝置為分析對象,研究其反轉旋耕刀在油莎豆收獲過程中的作業性能,裝置結構示意圖如圖1所示。反旋式油莎豆挖掘裝置主要由左側擋板、刀軸、刀座、刀片、變速箱、懸掛架、安裝機架、右側擋板組成。田間作業時,由拖拉機輸出軸將動力傳遞給反轉旋耕裝置,帶動旋耕刀軸旋轉切削土壤,并將豆土混合物沿導流護罩向后拋送,完成油莎豆收獲挖掘作業。
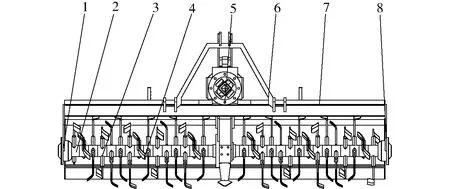
圖1 反轉旋耕裝置結構示意圖Fig.1 Structure diagram of anti-rotation planting device1.左側擋板 2.刀軸 3.刀座 4.刀片 5.變速箱 6.懸掛架7.安裝機架 8.右側擋板
旋耕刀為反轉旋耕裝置中的主要工作部件,由側切面、過渡面、正切面組成,如圖2所示。側切面具有切開土垡,切斷或推開草莖及殘茬的功能;正切面具有切削土壤及翻土、碎土、拋土等功能,本文結合離散元仿真試驗,探究側切面、過渡面、正切面對油莎豆收獲的影響規律。
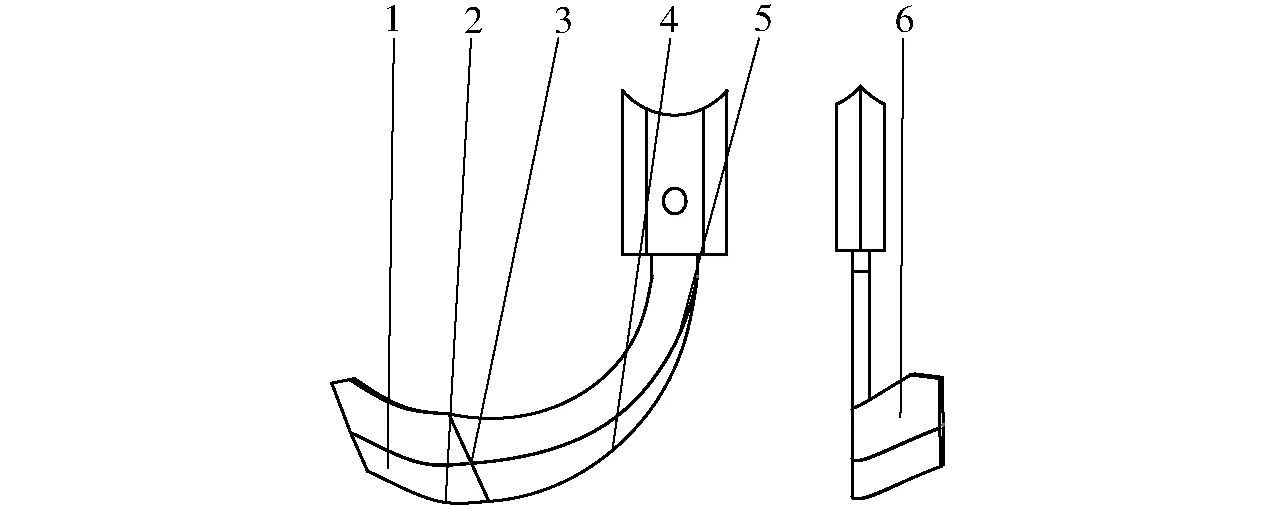
圖2 旋耕刀結構簡圖Fig.2 Structure diagram of rotary blade1.正切刃 2.過渡刃 3.過渡面 4.側切刃 5.側切面 6.正切面
以河南地區油莎豆種植模式為主要研究對象,通過實地調研分析,河南地區油莎豆種植區域以沙質土壤為主,油莎豆種植模式為平作,種植株距為13~15 cm,行距為15~20 cm,根系深度為13~15 cm,如圖3所示,土壤物理特性如表1所示。
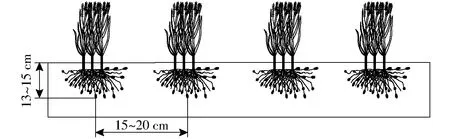
圖3 油莎豆種植模式Fig.3 Cultivation mode of Cyperus edulis

表1 土壤參數測定結果Tab.1 Measurement results of soil parameters
2 油莎豆根系土壤環抱體仿真模型
2.1 接觸模型
土壤顆粒之間接觸模型選擇Hertz-Mindlin with Bonding模型[12],如圖4所示,該模型可以通過結合力將相鄰兩個土壤顆粒粘結在一起,結合力可以承受切向和法向位移,可以表示旋耕刀鏟與油莎豆根系土壤環抱體存在的復雜受力關系,可以模擬土壤顆粒之間的粘結作用和土壤顆粒破碎,通過粘結鍵破碎數量得出土壤破碎率。選擇土壤顆粒半徑5 mm,顆粒粘結半徑為5.5 mm,其中該模型單位面積法向剛度為1.2×105N/m3,單位面積切向剛度為1.5×105N/m3,臨界法向應力為1.1×105Pa,臨界切向應力為1.0×105Pa。
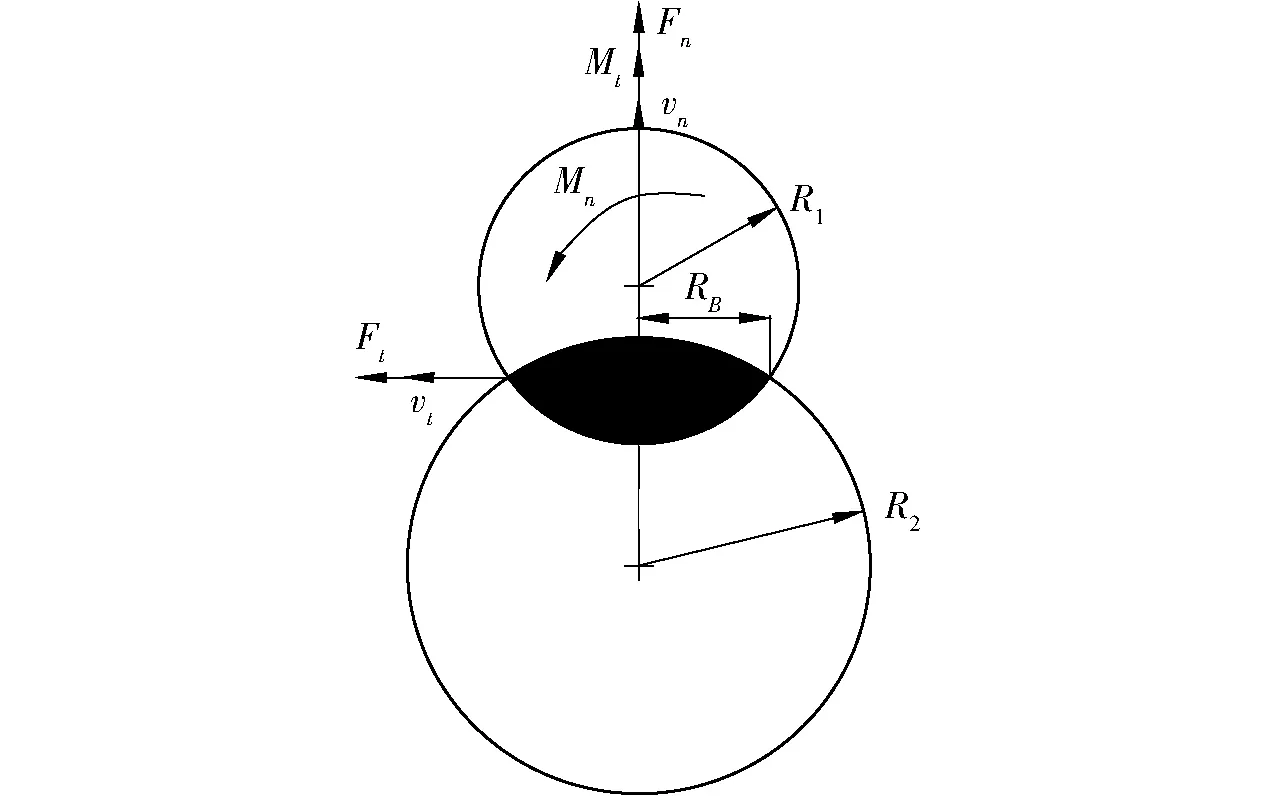
圖4 粘結鍵受力圖Fig.4 Force analysis diagram of bonded bond
土壤顆粒間Hertz-Mindlin with Bonding接觸模型計算公式為
(1)
式中Fn——法向接觸力,N
Ft——切向接觸力,N
Mn——法向力矩,N·m
Mt——切向力矩,N·m
vn——法向速度,m/s
vt——切向速度,m/s
kn——法向剛度,N/m
kt——切向剛度,N/m
ωn——法向角速度,rad/s
ωt——切向角速度,rad/s
A——單位接觸面積,mm2
J——慣性矩,mm4
δt——時間步長,s
RB——顆粒粘結半徑,mm
土壤顆粒間在法向和切向應力達到一定極值時粘結鍵將會斷裂,設斷裂時法向應力和切向應力分別為σmax、τmax,當粘結鍵斷裂時有
(2)
2.2 離散元接觸參數
為了確保仿真試驗的準確性,通過參數試驗以及查閱文獻[13-16],確定仿真試驗所涉及的接觸參數和基本物理參數,如表2所示。

表2 離散元參數Tab.2 Discrete element parameter
2.3 離散元建模
利用EDEM 2020軟件進行旋耕刀作用下的油莎豆根系土壤環抱體碎裂與運動的離散元仿真,將SolidWorks建立的旋耕刀模型保存為STL格式導入EDEM中,在離散元仿真試驗中,多數研究者采用直徑大于10 mm的土壤顆粒模型作為研究對象[17-19],為進一步提高仿真試驗精度,本文采用土壤顆粒直徑為5 mm,利用SolidWorks將油莎豆塊莖三維模型導入EDEM中,利用顆粒快速填充完成離散元建模。由于油莎豆根系具有柔軟、細長、地下莖分須多且方向不一致等特點,且垂直分布于土壤中[20],很難精準仿真油莎豆根須,本文將油莎豆根上部分采用直徑為8 mm、球心間隔為4 mm的顆粒進行組成,采用直徑為3 mm、球心間隔為1.5 mm的219個顆粒組成15cm長油莎豆根系,顆粒模型如圖5所示。

圖5 油莎豆塊莖和根莖離散元模型Fig.5 Discrete element model of tubers and rhizomes of Cyperus edulis
2.4 離散元試驗設計
為模擬油莎豆挖掘裝置實際作業狀態,根據河南地區油莎豆種植模式,利用EDEM建立長120 cm,高40 cm虛擬土槽,以土槽長方體作為土壤顆粒的顆粒工廠生成土壤顆粒,土壤顆粒數量為150 000,油莎豆株距15 cm,行距16 cm,每株油莎豆土壤環抱體結合12個油莎豆塊莖;同時根據前文土壤性質進行分層處理,0~5 cm為淺層,5~10 cm為中層,10~15 cm為深層,為便于分析在仿真過程中各層土壤-油莎豆-塊莖運動規律,在油莎豆-土壤-機具仿真模型中相應的進行土層劃分,如圖6所示。

圖6 土壤-旋耕刀-油莎豆土壤環抱體模型Fig.6 Soil-rotary cutter-Cyperus edulis agglomerate aggregate model
在仿真試驗過程中,旋耕刀彎折角為110°,旋耕刀工作幅寬為30 mm,同時將旋耕刀前進速度設置為0.5 m/s,刀軸角速度為30 rad/s,工作耕深為15 cm,為保證仿真過程精確性和連續性,設置仿真步長為3.14×10-6,網格單元尺寸為9 mm,為最小顆粒半徑的3倍,顆粒粘結半徑為5.5 mm,顆粒生成時間為0.4 s,仿真時間為4 s[21-24]。
2.5 油莎豆土壤環抱體運動分析
2.5.1油莎豆根系微觀運動
在離散元仿真過程中可以分析每個時刻耕作過程中油莎豆根系的運動軌跡,選取相鄰3行油莎豆根系進行研究,分別命名為10901、10902、10903,如圖7所示,研究旋耕刀反旋狀態下油莎豆根系的運動規律,10901油莎豆根系位于旋耕刀工作范圍邊緣區域,10902油莎豆根系位于旋耕刀正切刃內側靠近過渡刃的區域,10903油莎豆根系位于旋耕刀正切刃上方。在旋耕刀工作過程中每行油莎豆根系運動規律較為復雜,采用每行油莎豆在旋耕刀作用下的位移和受力來表征油莎豆運動特性,如圖8所示。
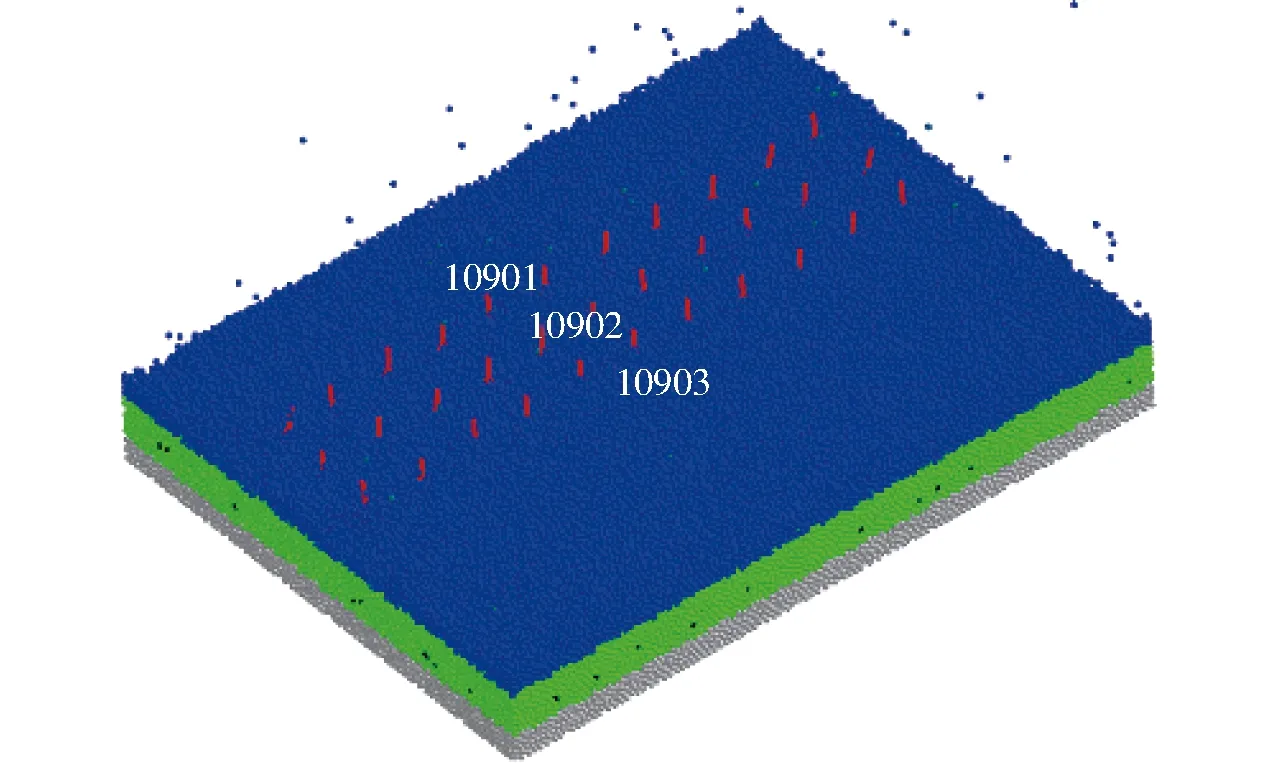
圖7 油莎豆土壤環抱體模型Fig.7 Aggregate model of Cyperus edulis
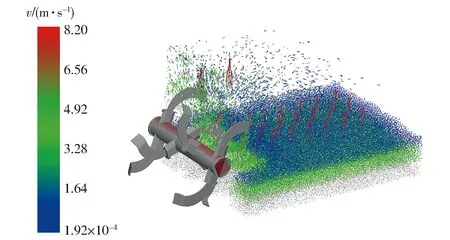
圖8 仿真挖掘試驗矢量圖Fig.8 Simulation excavation test vector illustration
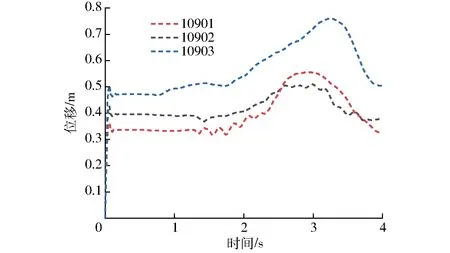
圖9 油莎豆根系位移曲線Fig.9 Root displacement curves of Cyperus edulis
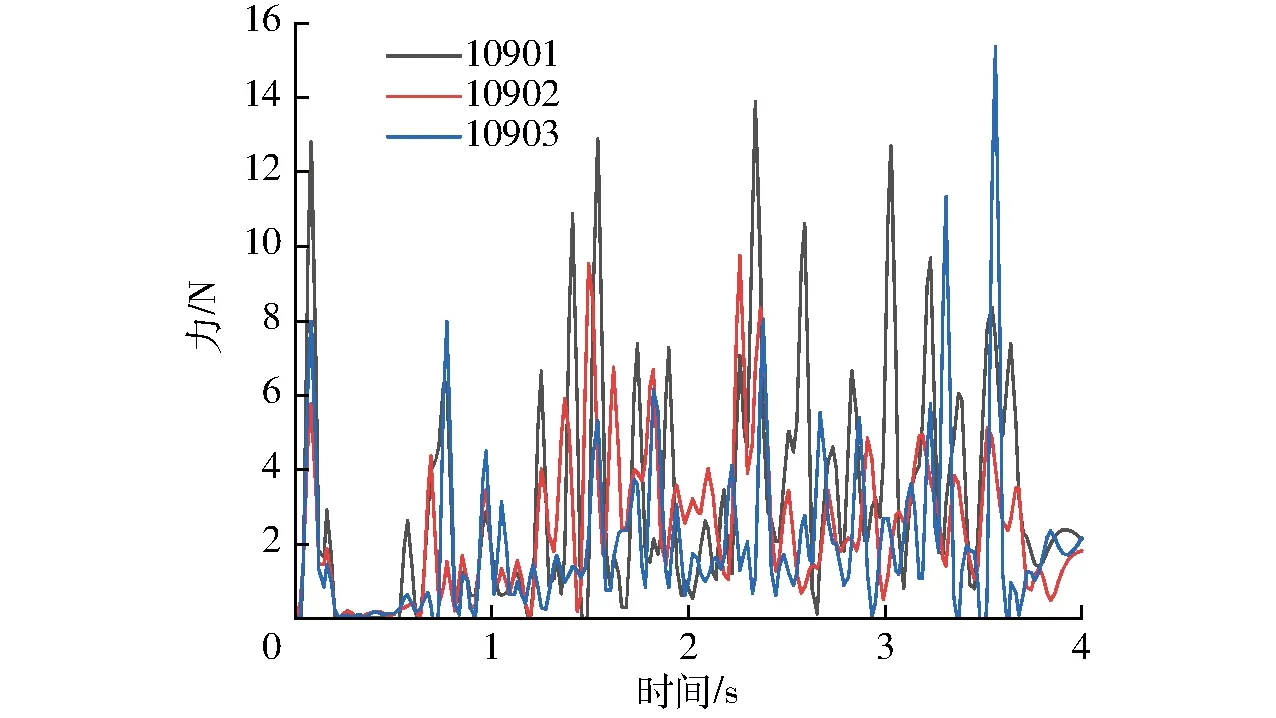
圖10 油莎豆根系受力曲線Fig.10 Root force curves of Cyperus edulis
油莎豆根系的位移和受力情況如圖9、10所示。由圖9可知,旋耕刀開始切削土壤時,在0~0.2 s時間內,10901、10902、10903幾乎同時開始運動,但由于10901號位于旋耕刀工作范圍邊緣區域,位移最小,10902油莎豆根系位于旋耕刀側切刃內側靠近過渡刃的區域,受到土壤擾動影響較小,位移次之,位于正切刃正上方的10903號在正切刃動態滑切作用下使得油莎豆根系向上運動的幅度最大,在0.2 s之后,油莎豆根系的位移有減小的趨勢,主要是因為油莎豆在拋送過程中受拋起土壤的阻力作用。
由圖10可知,在旋耕刀剛接觸油莎豆根系時,油莎豆根系受力瞬間增大,但由于3行油莎豆10901、10902、10903位于旋耕刀工作區域不同,其受力也不同,但隨著旋耕刀的往復式切削土壤,3組油莎豆根系受力的變化趨勢一致。
2.5.2油莎豆塊莖微觀運動
通過油莎豆種植基地實地調研與數據采集,油莎豆根系與油莎豆塊莖的結合力在1~2N之間,在旋耕刀切削力的作用下部分油莎豆塊莖與根系分離,為便于研究油莎豆在仿真過程中運動軌跡,以10901、10902、10903所分布的油莎豆塊莖為研究對象,利用油莎豆土壤環抱體矢量運動來分析油莎豆塊莖位移和受力規律。
油莎豆塊莖位移和受力情況如圖11、12所示。由于所選取的研究對象位于旋耕刀有效工作區域不同,導致在仿真過程中油莎豆塊莖受到土壤擾動影響也有所不同,0~0.2 s過程中,由于受到旋耕刀切削作用部分油莎豆塊莖與根系分離,油莎豆塊莖位移和受力瞬時增大,塊莖隨著旋耕刀運動軌跡向上拋起,由于在拋起的過程中受到土壤的阻力作用,油莎豆塊莖位移略微降低,但隨著仿真進行,油莎豆塊莖位移和受力與油莎豆根系變化趨勢一致。
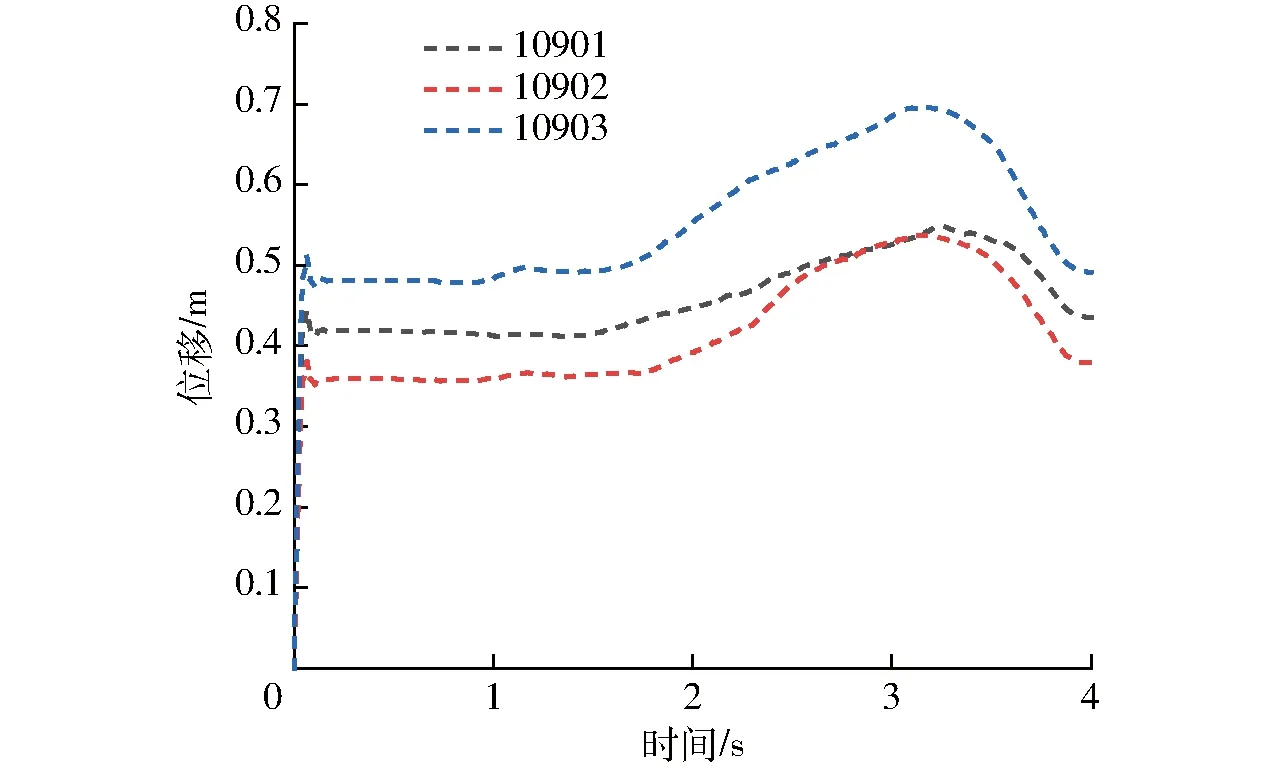
圖11 油莎豆塊莖位移曲線Fig.11 Displacement curves of tuber of Cyperus edulis
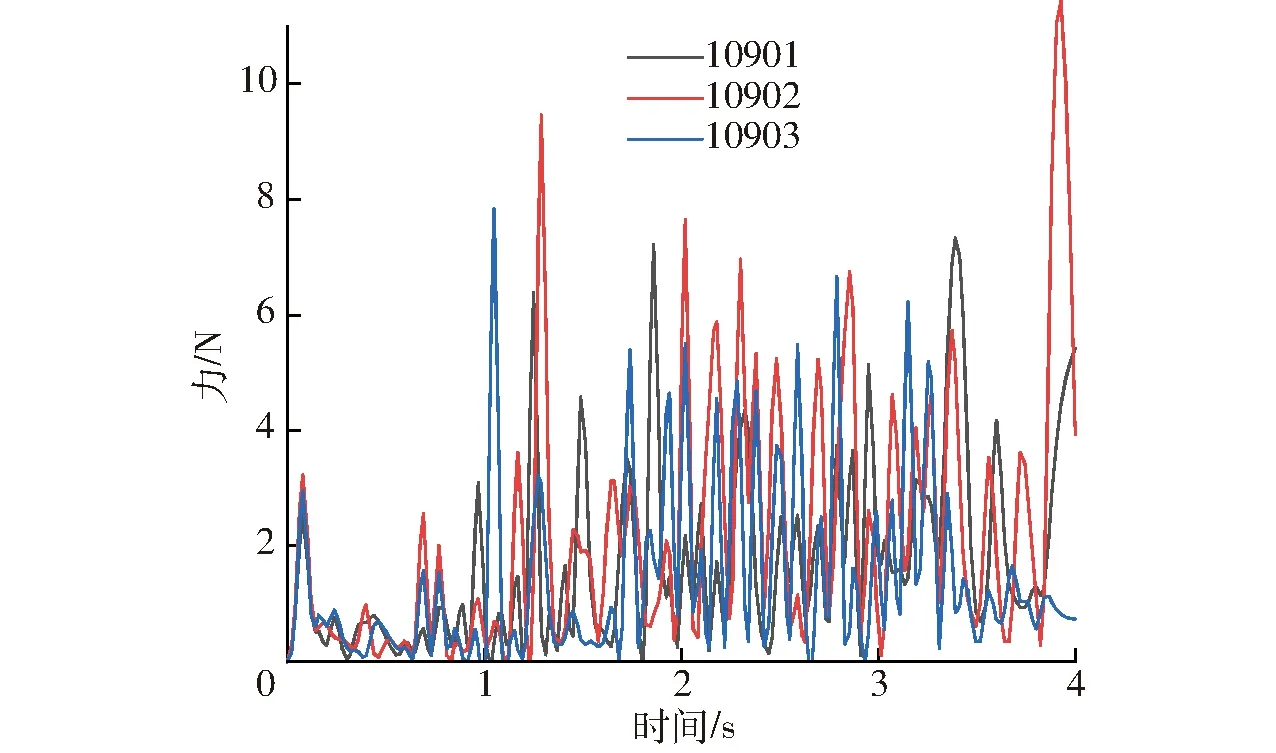
圖12 油莎豆塊莖受力曲線Fig.12 Force curves of tuber of Cyperus edulis
2.5.3土壤顆粒微觀運動
旋耕刀在反旋工作過程中正切刃部位首先開始切削土壤,由下至上切削,依次接觸深層土壤、中層土壤和淺層土壤,各層土壤前進方向的位移主要由旋耕刀切削以及周圍土壤擾動造成,在旋耕刀切土的過程中,首先接觸深層土壤,由于受到淺層和中層土壤的阻礙作用,故深層土壤位移最小,中層土壤次之,淺層土壤位移最大,其各層土壤位移和受力曲線如圖13、14所示。
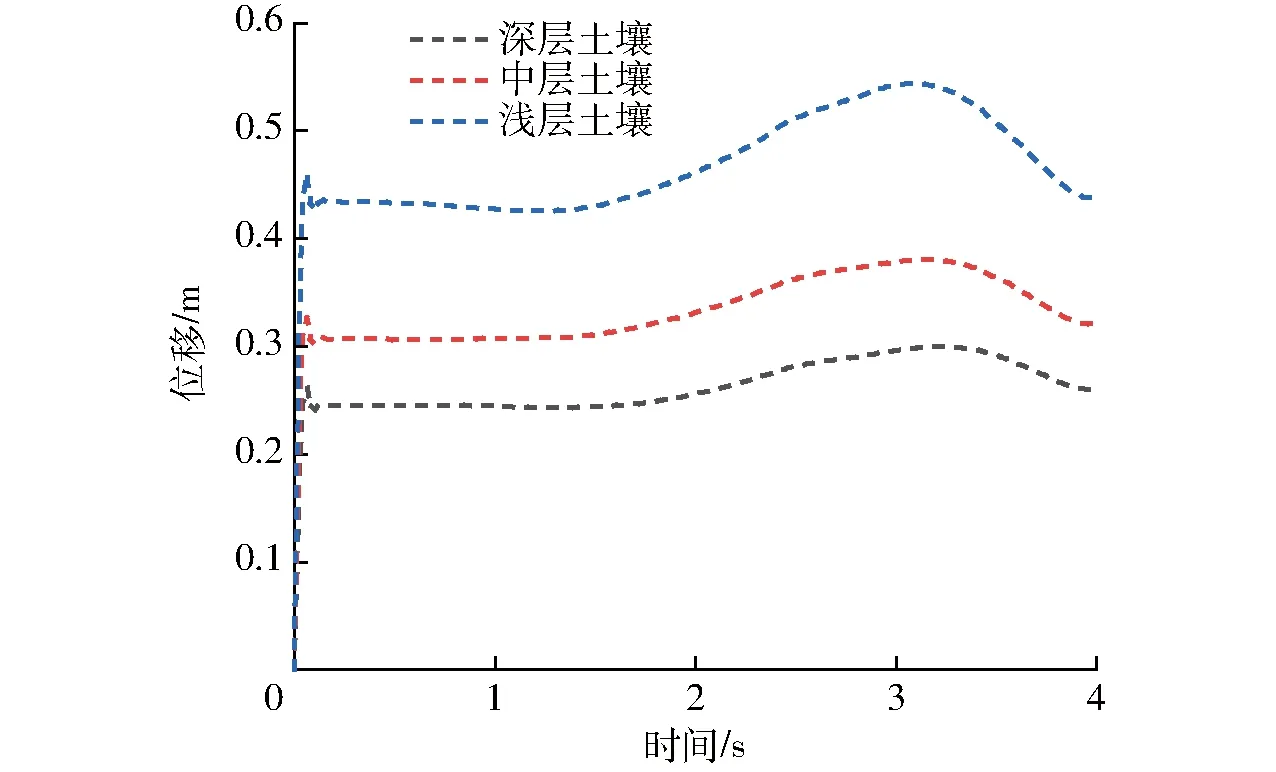
圖13 土壤位移曲線Fig.13 Soil displacement curves
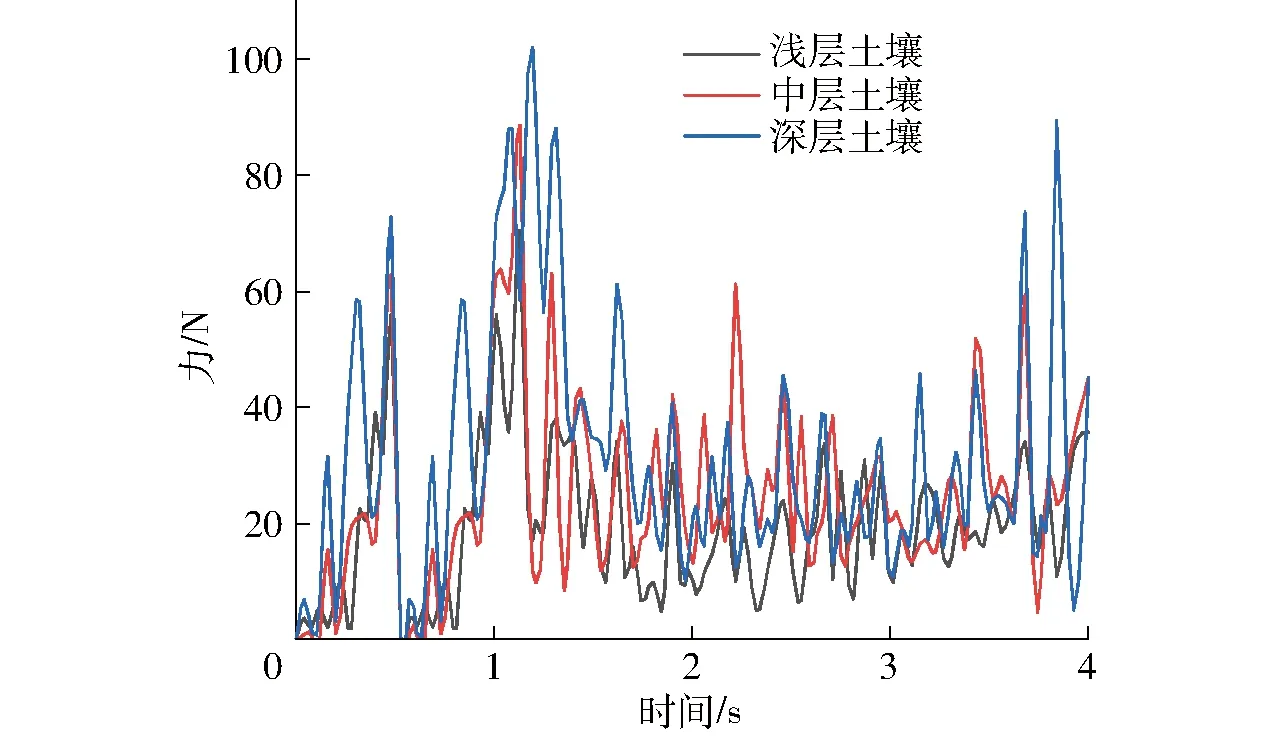
圖14 土壤受力曲線Fig.14 Soil force curves
3 參數優化試驗
3.1 試驗材料
試驗設備包括:TCC電力變頻四輪驅動土槽試驗車、油莎豆反向旋拋裝置試驗臺架、BZ1403型拉力傳感器、BSQ-2型變送器、PXI-6133型數據采集卡、便攜式計算機、電子秤、米尺等。2021年11月于青島農業大學機電工程學院土槽實驗室進行,如圖15所示。

圖15 油莎豆挖掘臺架試驗Fig.15 Cyperus edulis excavation bench test
3.2 單因素試驗
3.2.1試驗設計
為探究影響油莎豆土壤環抱體破碎效率的主要影響因素取值范圍,在旋耕刀結構參數分析的基礎上,以相位角β以及安裝間距S為試驗因素,以埋果率和土壤破碎率為試驗指標進行單因素試驗,同時充分考慮旋耕刀彎折角、工作幅寬以及回轉半徑對于試驗指標的影響關系,根據河南民權油莎豆種植農藝要求,選取相位角取值范圍為10°~90°,安裝間距取值范圍為100~220 mm。
3.2.2試驗結果與分析
設定旋耕刀前進速度為0.5 m/s、刀軸角速度30 rad/s,旋耕刀安裝間距S為100 mm、相位角β分別為10°~90°進行試驗。旋耕刀相位角β對土壤環抱體破碎率的影響如圖16所示,隨著相位角的增大,油莎豆根莖土壤破碎率呈先增大后減小的趨勢,在相位角為50°時接近峰值。旋耕刀相位角β對埋果率的影響如圖17所示,隨著β的增大,埋果率呈先減小后增大的趨勢,在β為40°~70°時,埋果率較小。
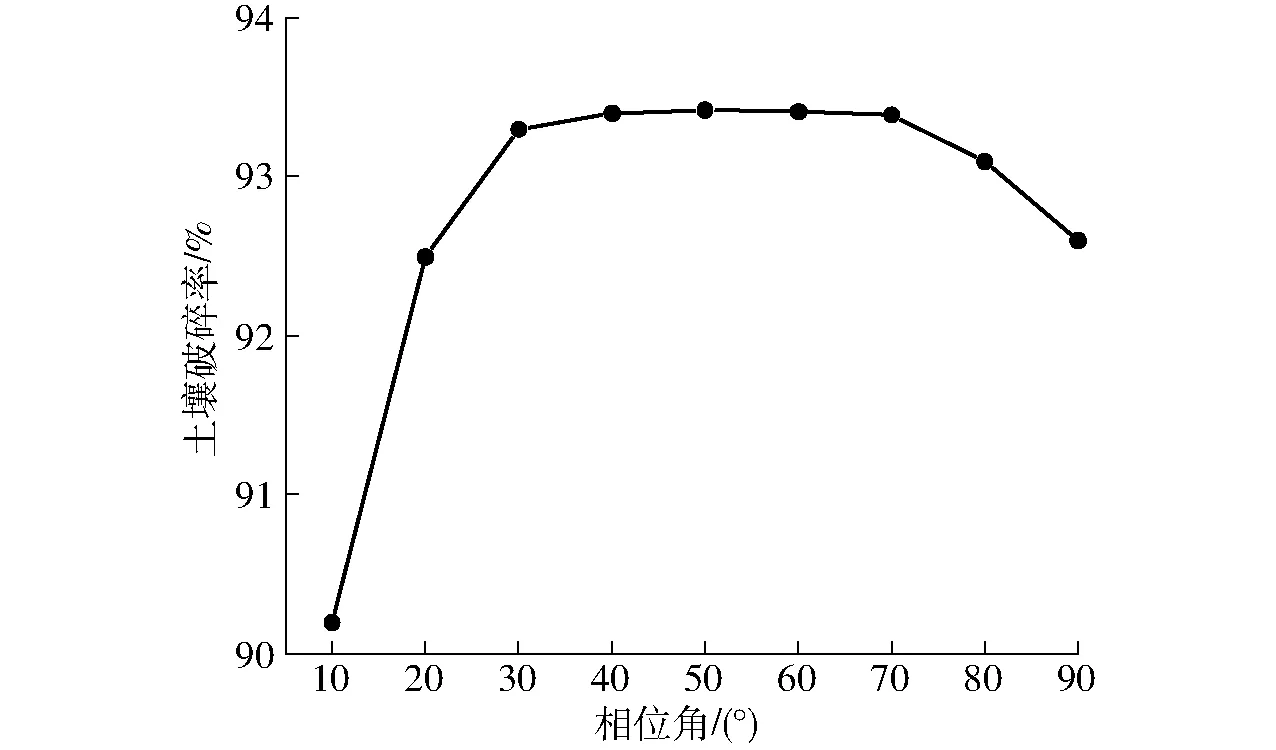
圖16 相位角對土壤破碎率的影響Fig.16 Influence of phase angle on soil fragmentation rate
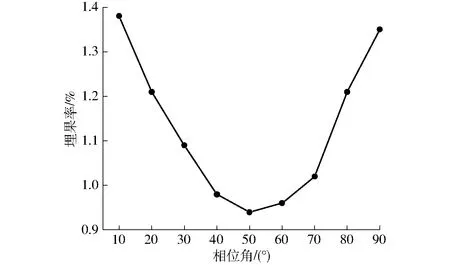
圖17 相位角對埋果率的影響Fig.17 Influence of phase angle on work resistance
設定旋耕刀前進速度為0.5 m/s、刀軸角速度為30 rad/s、旋耕刀相位角β為40°、安裝間距S分別為100~220 mm進行臺架試驗。旋耕刀安裝間距S對土壤環抱體破碎率的影響如圖18所示,隨著S的增大,在間距為160 mm時接近峰值,但間距在130~160 mm之間,破碎率變化不大。旋耕刀安裝間距S對埋果率的影響如圖19所示,隨著S的增大,埋果率呈先減小后增大的趨勢,在S為140~170 mm時,埋果率較小。

圖18 安裝間距對土壤破碎率的影響Fig.18 Influence of installation spacing on soil fragmentation rate
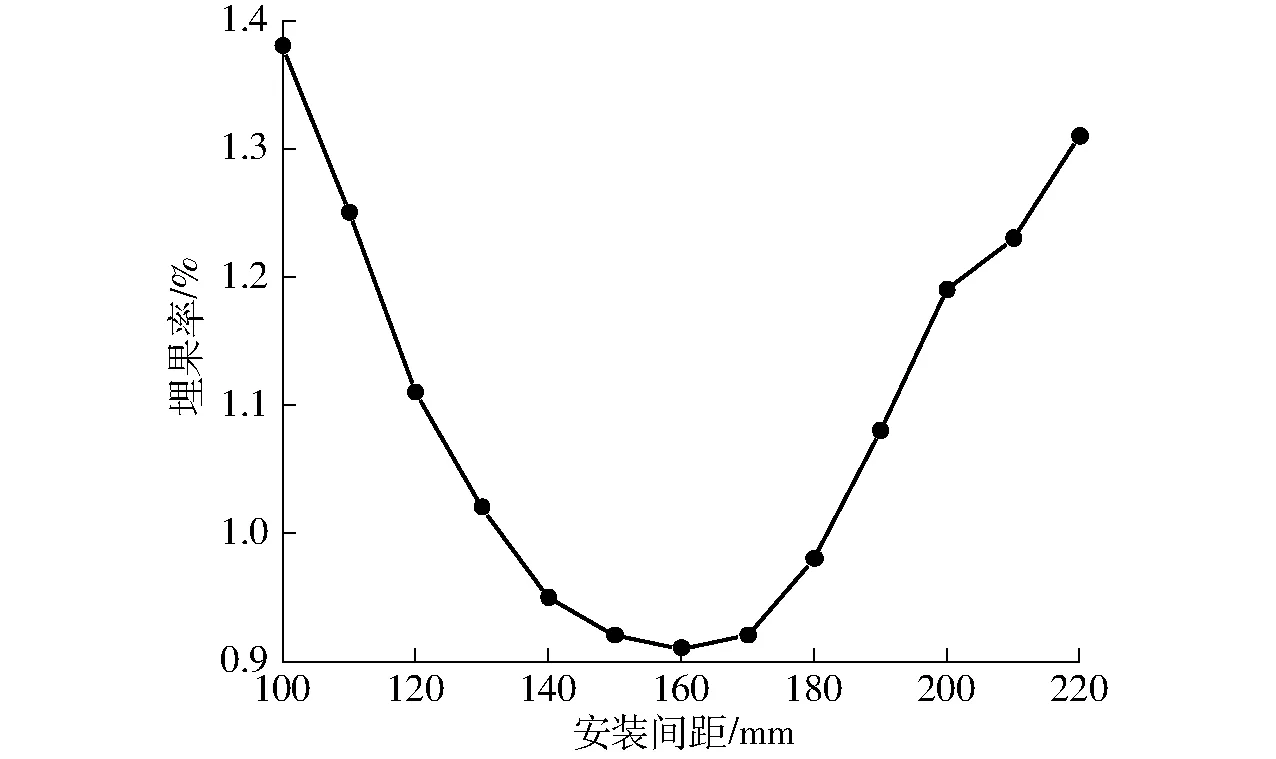
圖19 安裝間距對埋果率的影響Fig.19 Influence of installation spacing on working resistance
綜上所述,選取旋耕刀相位角β(40°~70°)和旋耕刀間距S(140~170 mm),挖掘裝置可以獲得比較理想的作業性能。
3.3 多因素試驗
3.3.1試驗設計
為進一步探究油莎豆土壤環抱體的破碎規律以及破碎效果,設計二因素五水平二次正交旋轉中心組合試驗方案,以旋耕刀相位角、旋耕刀安裝間距為試驗因素,以埋果率和土壤破碎率為試驗指標,結合前期油莎豆土壤環抱體運動分析以及單因素試驗結果,試驗因素編碼表如表3所示。
3.3.2試驗結果與分析
試驗結果如表4所示,x1、x2為相位角、安裝間距編碼值。對表4數據進行二元回歸擬合,得到以編碼值表示的埋果率和土壤破碎率回歸方程為
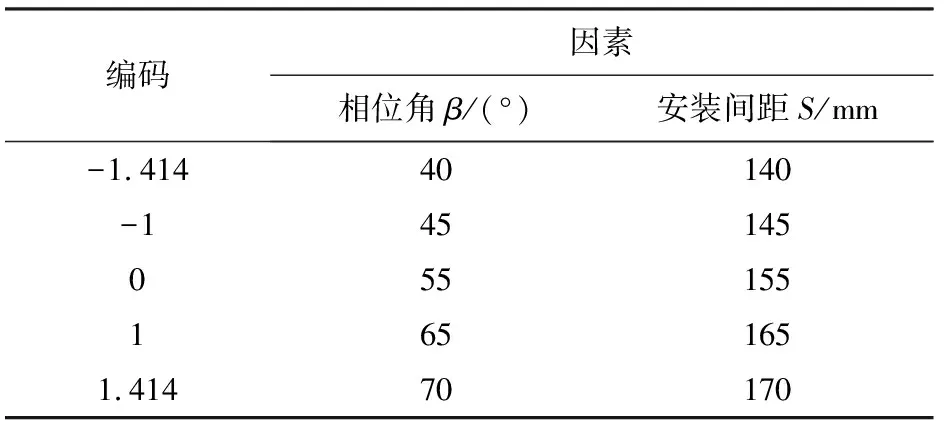
表3 試驗因素編碼Tab.3 Test factors and coding

表4 仿真試驗結果Tab.4 Simulation test results

(3)

(4)
試驗指標埋果率和土壤破碎率的方差分析結果如表5、6所示。
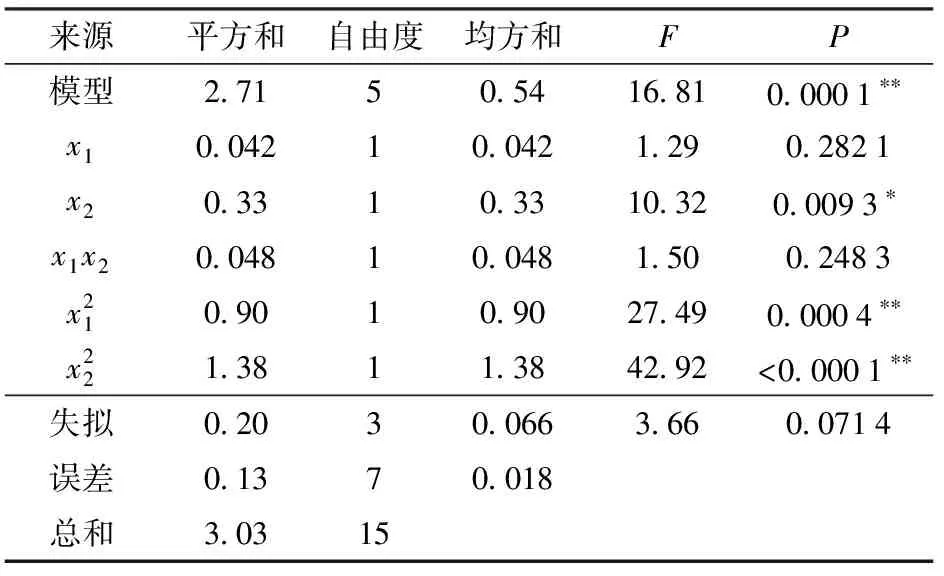
表5 埋果率方差分析Tab.5 Analysis of variance of buried fruit rate
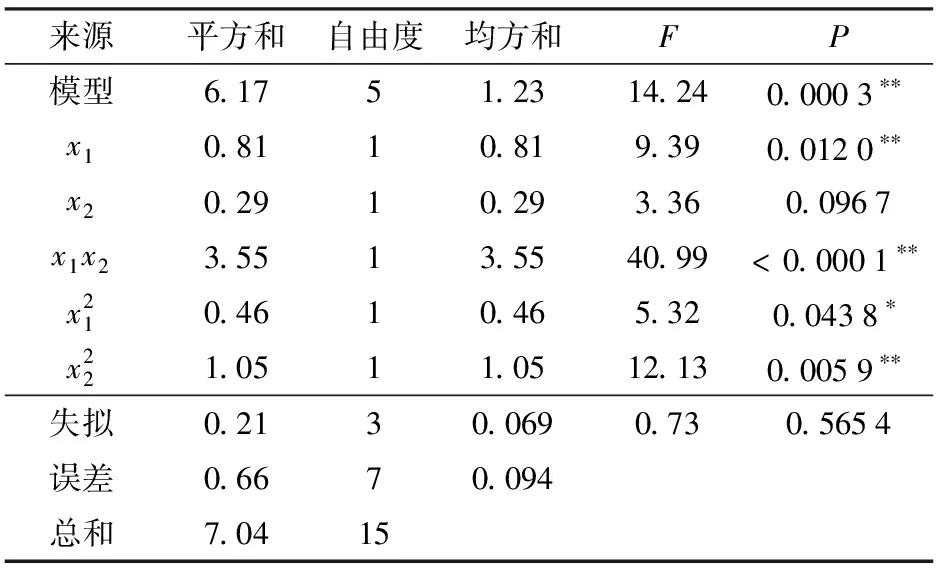
表6 土壤破碎率方差分析Tab.6 Analysis of variance of soil fragmentation rate

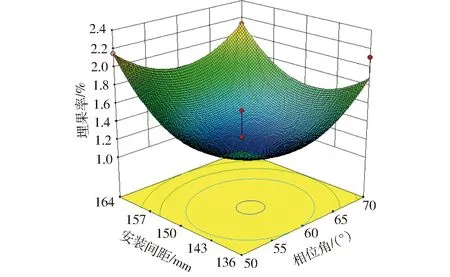
圖20 試驗因素對埋果率的影響Fig.20 Influence of test factors on work resistance

圖21 試驗因素對土壤破碎率的影響Fig.21 Influence of test factors on soil fragmentation rate
3.3.3參數優化
為得到相位角和安裝間距最佳試驗因素參數組合,設立優化目標與邊界條件為
(5)
利用Design-Expert分析求解,當相位角61°、安裝間距150 mm時,為最優參數組合,此時埋果率為1.39%,土壤破碎率為94.10%。
3.4 田間驗證試驗
3.4.1試驗設計
為驗證最優參數組合下油莎豆收獲質量,于2021年12月在河南省民權油莎豆種植基地進行田間收獲試驗,該地區油莎豆種植模式為平作,如圖22所示。結合農藝要求、理論分析與仿真模擬參數優化試驗結果,可得行距為140 mm,株距為120 mm,油莎豆生長深度160 mm,土壤含水率為16.5%,田間試驗土壤類型為沙土。
油莎豆埋果率測定,參照NY/T 502—2016《收獲機作業質量》,土壤破碎率測定,按照GB/T 5668—2008《土壤破碎率測量》實施。試驗重復進行6次,每行隨機測量10點,埋果率和土壤破碎率計算式為
(6)
(7)
式中y1——油莎豆埋果率,%
m1——試驗區域地面上油莎豆塊莖質量,g
m2——試驗區域埋在土中油莎豆塊莖質量,g
m3——試驗區域收獲的油莎豆塊莖質量,g
Sb——土壤破碎率,%
ma——測定區內全耕層土塊總質量,g
m4——測定區內最長邊大于3 cm的土塊質量,g
3.4.2試驗結果與分析
為檢驗設計的旋耕刀排列方式的作業性能,進行驗旋耕刀排列方式對比試試驗,結果如表7所示。
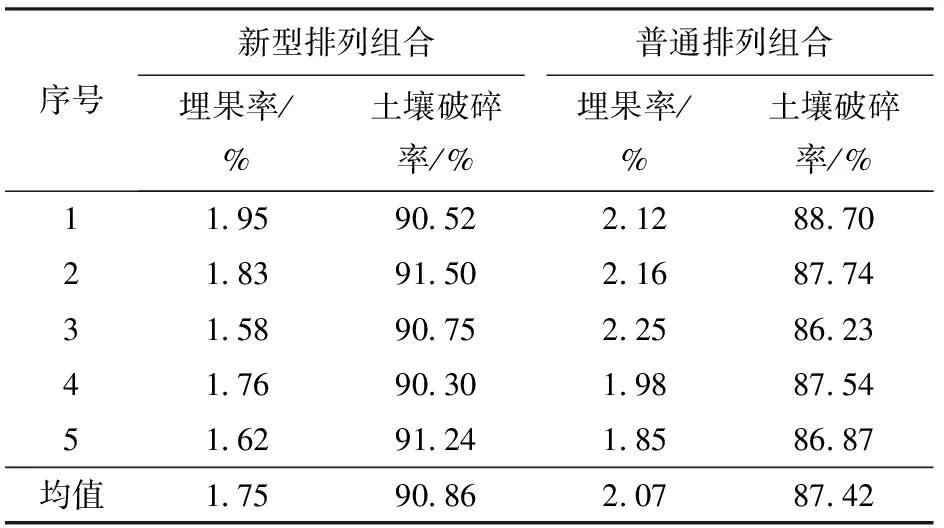
表7 田間性能試驗對比Tab.7 Field performance test comparison
試驗重復進行5次,試驗結果表明最優試驗參數組合下最高埋果率為1.95%,最低埋果率為1.58%,平均值為1.75%,土壤破碎率最高為91.50%,最低為90.30%,平均值為90.86%;普通旋耕刀組合方式最高埋果率為2.25%,最低埋果率為1.85%,平均值為2.07%,土壤破碎率最高為88.70%,最低為86.23%,平均值為87.42%,通過對比試驗發現,最優試驗參數組合下在埋果率和土壤破碎率性能方面均優于普通旋耕刀組合方式,埋果率降低了13.33%,土壤破碎率提高了3.15%,滿足油莎豆的收獲要求。
4 結論
(1)使用離散元方法建立油莎豆-土壤-機具的離散元模型,通過分析油莎豆土壤環抱體在旋耕刀作用過程中土壤、根系碎裂的過程來研究油莎豆土壤環抱體各部分的運動規律。
(2)選取特定3行油莎豆植株為研究對象,在仿真過程中研究油莎豆根系-塊莖-土壤的位移和受力情況,結果表明,各部分的位移和受力曲線整體趨勢一致,結合單因素試驗得到選旋耕刀相位角β為40°~70°,旋耕刀安裝間距S為140~170 mm。
(3)建立了旋耕刀-土壤-油莎豆土壤環抱體離散元模型,進行了油莎豆虛擬仿真挖掘試驗,從微觀角度分析了油莎豆土壤環抱體各部分運動規律,根據Design-Expert試驗分析,確定了旋耕刀組合的最佳參數:相位角61°、安裝間距150 mm,在相同參數設置下與普通旋耕刀組合進行對比試驗,埋果率降低了13.33%,土壤破碎率提高了3.15%,滿足油莎豆收獲要求。
