基于離散元法的三七仿生挖掘鏟設計與試驗
2022-06-21 08:20:42張兆國薛浩田王一馳解開婷鄧寓軒
農業機械學報 2022年5期
關鍵詞:模型
張兆國 薛浩田 王一馳 解開婷 鄧寓軒
(1.昆明理工大學現代農業工程學院, 昆明 650500; 2.云南省高校中藥材機械化工程研究中心, 昆明 650500)
0 引言
機械化采挖三七能減輕人工勞動強度提高收獲效率,目前三七采挖對機械化水平提出更高要求,需對采挖過程中的機理進行研究和揭示,在提高收獲效率的同時減少挖掘阻力;而利用仿生設計以及離散元法的優化設計技術已是現代農業機械研究的重要前沿和熱點[1];通過離散元法(EDEM)可建立相似性高的仿真模型,模擬現實作業、剖析挖掘過程機理,分析挖掘阻力的來源,從而驗證仿生裝置設計的優良性和合理性。
國內外利用仿生設計和離散元法在物料參數標定、工作機理研究、裝置聯合仿真等方面做了大量研究。肖茂華等[2]提取螻蛄爪趾的邊緣曲線設計了仿生旋耕刀,建立土壤離散元模型對比聯合仿真試驗,驗證了離散元模型的準確性;LI等[3]將穿山甲鱗片表面結構應用于馬鈴薯挖掘鏟鏟面,利用離散元法建立聚合的粘性土壤,對比平面鏟得仿生鏟鏟面的減阻性更優;趙淑紅等[4]研究玉米秸稈物料特性以及深松鏟滑切原理,建立離散元分層土壤設計了交互式分層深松鏟,分析土壤顆粒的速度矢量方向,驗證了分層深松鏟減阻性優于其他鏟形;田昆鵬等[5]提取天牛上顎切割齒的輪廓曲線,設計了大麻莖稈仿生切割刀片,進行切割對比試驗后表明仿生刀片切入力強、割茬口齊平、切割質量高;樊昱[6]構建馬鈴薯的根系團聚體離散元模型,對比不同鏟形仿真試驗和土槽試驗的工作阻力,驗證離散元模型的準確性和可靠性,并分析團聚體分離時的動態,揭示挖掘過程的土壤相互作用。由以上文獻可知,目前三七根土離散元模型的構建處于空白階段,也尚未開展有關三七挖掘機理的分析;上述文獻中未分析仿生裝置挖掘時,鏟面結構對于根土顆粒位移流向的影響;因此設計仿生挖掘鏟達到減阻效果具有現實意義。
綜上,本文借鑒文獻中的離散元法和仿生手段,以三七根莖以及種植土壤作為研究對象,測定物料的物理本征參數,采用逆向工程手段建立根土離散元復合模型;根據野豬翻土的動物特性,利用三維掃描采集野豬頭部的點云數據,進行仿生挖掘鏟的理論力學分析和設計;通過仿真和土槽對比試驗,剖析三七挖掘機理,驗證仿生挖掘鏟的減阻性以及理論力學模型的可行性。
1 三七根莖-種植土壤離散元模型
三七種植農藝要求為壟作,植株行距100 mm、間距150 mm,如圖1所示;待采挖的三七根系深入土壤且十分發達,種植深度根據海拔氣候的差異在150~260 mm之間[7],種植深度決定了挖掘鏟的入土深度,且越深土壤間粘結作用越大,挖掘鏟鏟面的承載以及前進阻力也會增加,這是挖掘阻力的來源之一[8];故測定三七根莖、種植土壤等基本物理參數,對于分析根土結合、根土間相互作用、離散元模型的建立都有直接影響。

圖1 三七種植大棚Fig.1 Panax notoginseng planting greenhouse
1.1 三七根莖及種植土壤物理參數測定
1.1.1三七根莖的物理參數測定
三七根莖及種植土壤樣本取自云南省丘北縣,選同一壟中部面積1 m2內無病害共26株三七根莖,考慮到三七根莖外形不規則,故利用DIN ISO 11465—1996《土壤質量 土壤生物的干物質和水含量的測定 重量法》中的比重杯法測量根莖密度,得三七根莖密度平均值為1.01 g/cm3,密度測定裝置及試驗數據如圖2所示。
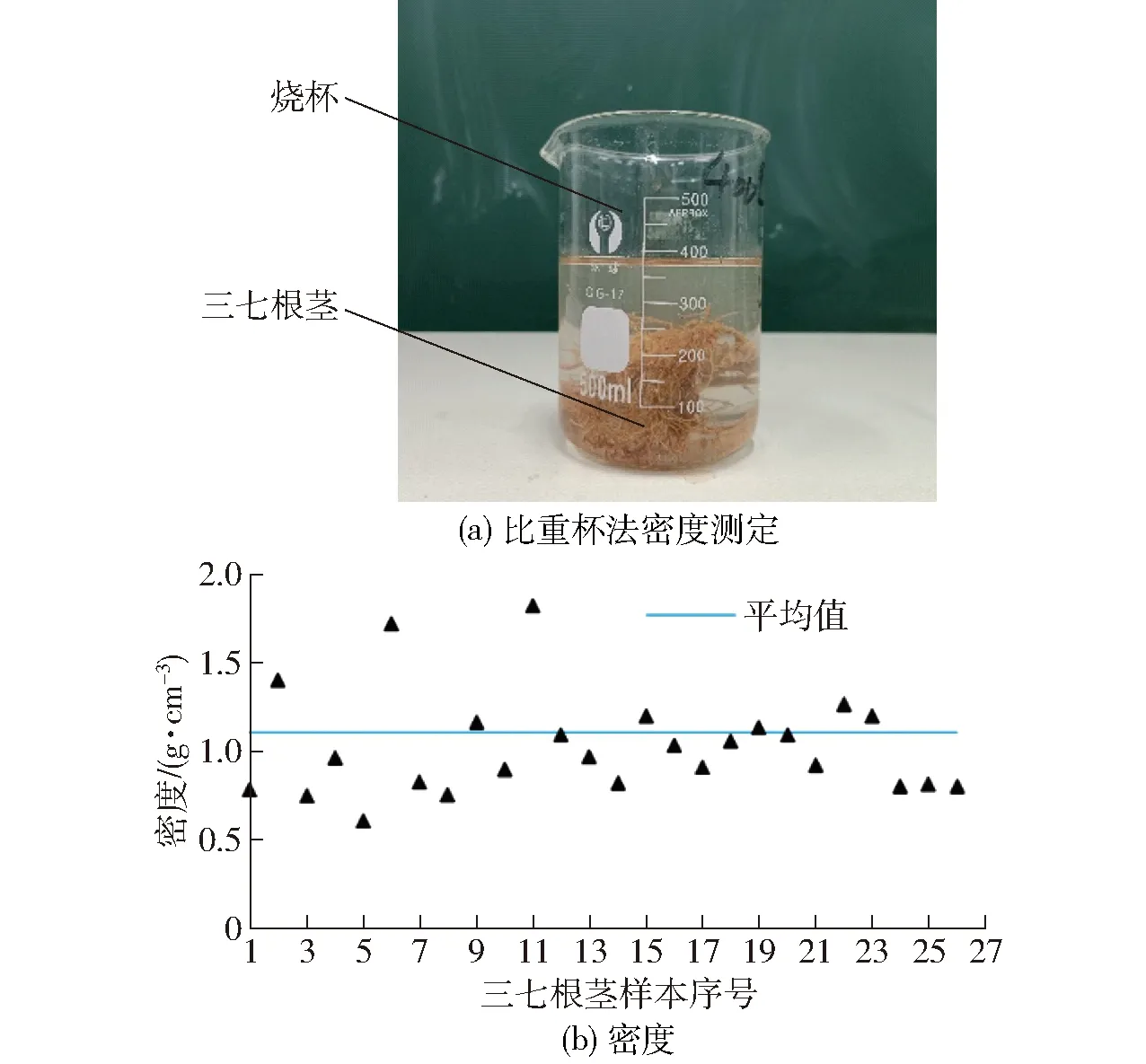
圖2 三七根莖密度測定結果Fig.2 Determination of rhizome density of Panax notoginseng
1.1.2種植土壤的物理參數測定
由于種植土壤是離散元化的形式,建立土壤離散元模型時,只考慮土壤顆粒的半徑、分級顆粒大小、選定顆粒形狀進行組合。為消除土壤采樣的差異,試驗在面積1 m2內依據國標五點采樣法進行取樣,根據三七種植農藝要求,取樣深度在150~260 mm之間,每個樣本為(1 000±10)g,利用4級泰勒篩開展共110組土壤粒徑構成試驗[9],取均值得0~1 mm顆粒占比34.95%、1~2 mm顆粒占比21.45%、2~5 mm顆粒占比22.15%、5 mm以上顆粒占比21.45%。樣本篩分后如圖3所示。

圖3 種植土壤泰勒篩篩分結果Fig.3 Taylor sieve for planting soil
含水率對土壤間的粘結力有直接作用,水分在土壤顆粒間產生毛細作用的拉力,且含水率影響土壤結合的類型,為后續離散元復合模型的選擇提供理論依據與參考[10]。考慮三七種植的農藝深度,對同一壟作的種植土壤,分別測定深度50、100、150、200 mm的平均含水率為5.24%、10.88%、16.71%、24.12%(圖4)。
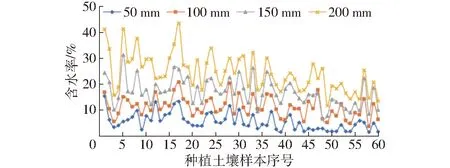
圖4 不同深度土壤含水率Fig.4 Soil moisture content at different depths
1.2 三七根莖及種植土壤的離散元模型
在離散元仿真試驗中,為保證仿真試驗結果準確有效,建立準確可靠的離散元模型,故對三七根莖及種植土壤的物理本征參數進行確定,通過剪切和拉伸試驗以及查閱相關參數標定文獻,確定根土的物理本征參數,如表1所示。
1.2.1三七根莖離散元模型
逆向工程是根據已有實物進行模型重構,通過三維掃描儀測量物體點云數據,生成數字化模型,然后進行修改、優化、再設計的過程[15-16]。三七根莖受多種因素影響,生長成熟后呈現不規則形狀,主要由主根和支根構成,如圖5所示,且支根綿密細長和土壤纏繞,難以用逆向工程提取特征,故為降低三維掃描建模難度,掃描時暫時忽略支根。參照文獻[17-19]中逆向建模的方法,利用三維掃描建模能有效提取三七根莖的外形尺寸輪廓,減少建模難度和周期,快速掃描和測量目標物體的細節,準確解譯目標物體的三維信息,使模型更加接近實際,一定程度上能消除仿真試驗的誤差,也為建立離散元模型做好前期準備。

表1 根莖與土壤本征物理參數Tab.1 Rhizome and soil intrinsic physical parameters

圖5 三七根莖結構Fig.5 Rhizome structure of Panax notoginseng
選取云南省丘北縣三七樣本,為降低三維掃描建模難度,掃描前先剪去支根,將定位貼紙粘貼主根周圍進行尺寸定位識別,確保尺寸、形狀、輪廓和實際基本一致;確定掃描采集區域大小,掃描完樣本一側后,翻轉180°再次掃描采集根莖正反表面的點云數據,利用正反兩面翻轉扣合的方式進行模型構建,通過后處理降噪修剪得出三七根莖的三維模型,掃描過程如圖6所示。

圖6 根莖三維掃描建模過程Fig.6 Rhizome 3D scanning modeling process
三七主根建模完成后,考慮支根與種植土壤的纏繞影響,利用SolidWorks曲線掃描命令進行支根建模;因為采挖時三七的損傷表現為破皮、斷裂,要求離散元模型模擬根莖內部結構的連接以及凸顯損傷情況,所以選用Hertz-Mindlin with Bonding模型進行顆粒填充,參考根莖類物料的設置[20-21]得Bonding鍵參數如表2所示;試驗測得三七根莖三軸平均尺寸為131.56 mm×142 mm×105.56 mm、主根平均直徑為24.91 mm;兼顧仿真效率和周期,對三七主根、支根分別設置半徑1 mm和0.25 mm共計9 647個顆粒進行填充,得三七根莖離散元模型如圖7所示。
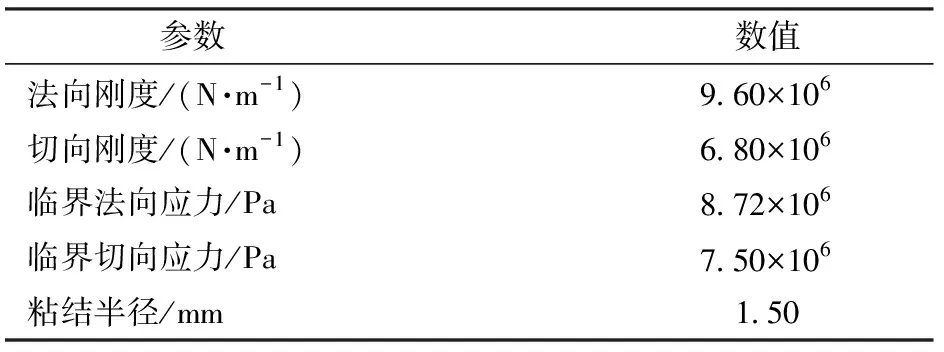
表2 三七Bonding鍵參數設置Tab.2 Bonding key parameter setting of Panax notoginseng
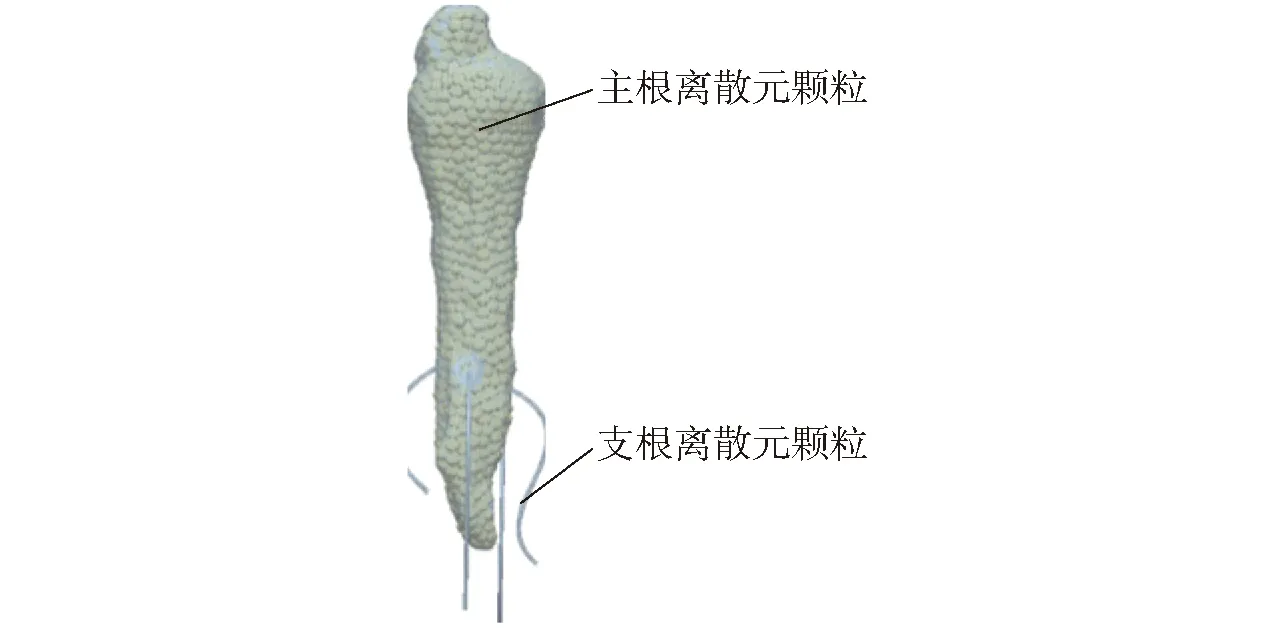
圖7 三七離散元模型Fig.7 Discrete element model of Panax notoginseng
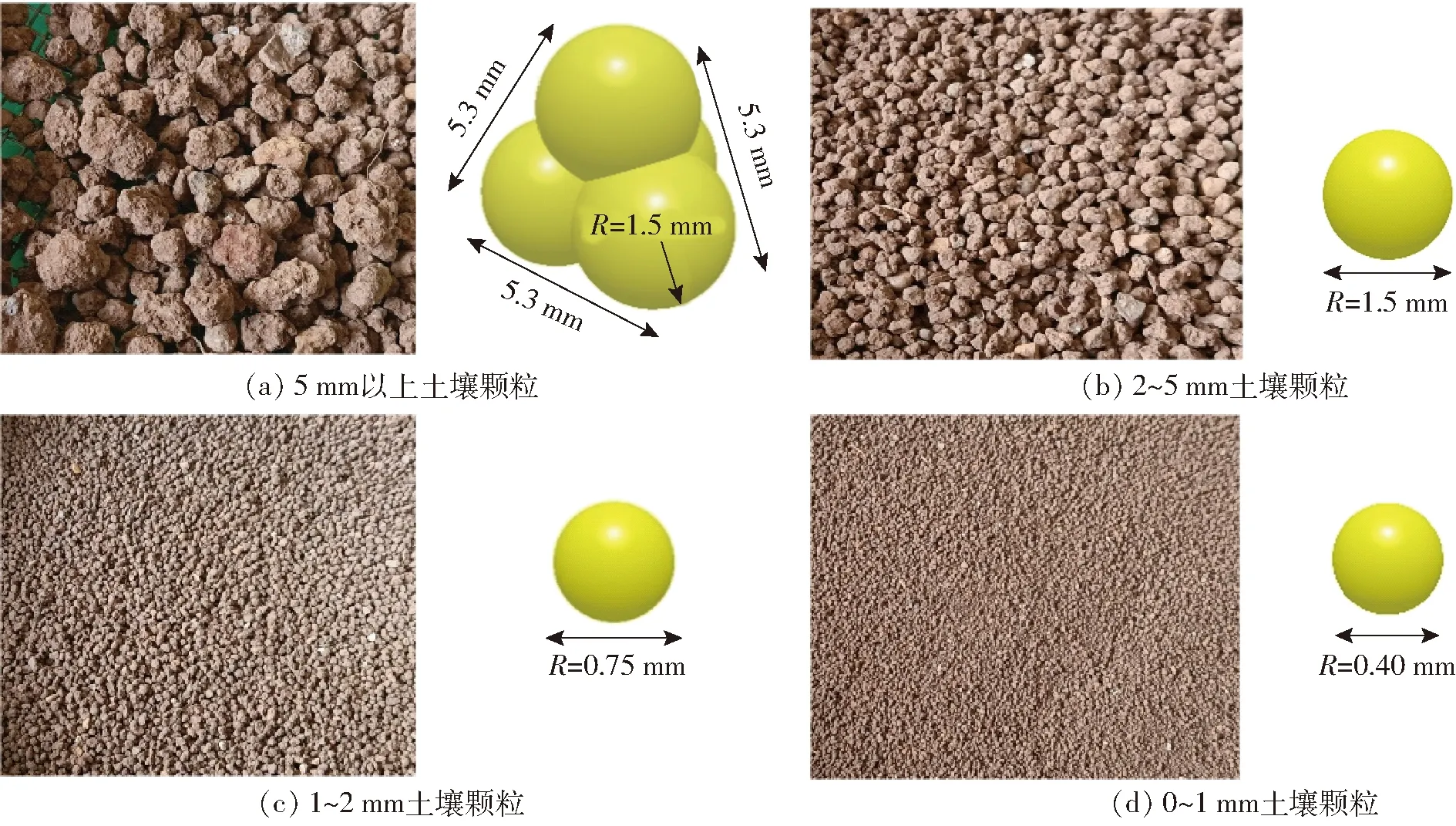
圖8 種植土壤離散元模型Fig.8 Discrete element model for planting soil
1.2.2種植土壤的離散元模型
在建立種植土壤的離散元模型時,考慮到土壤自然狀態下就是離散化的顆粒,所以僅選擇離散元顆粒的半徑和顆粒類型,使離散元模型及試驗結果貼合實際。利用四級泰勒篩進行篩分后,觀察可知5 mm以上的土壤顆粒呈現不規則形狀,故選用四球組合形式的顆粒,顆粒總長為5.3 mm、半徑1.5 mm; 2~5 mm、1~2 mm、0~1 mm的土壤顆粒是類圓球形,故選擇圓球形顆粒類型,顆粒半徑分別為1.5、0.75、0.4 mm。顆粒類型及半徑尺寸如圖8所示。
1.3 三七根莖-種植土壤的離散元復合模型
三七根莖和種植土壤產生粘結,主要是支根與土壤的結合,緊密程度取決于支根的繁茂;土壤和根莖表皮的粘結,取決于含水率的大小;再者是土壤間水分子的架構也造成粘附[22]。表面粘連或粘附體現在顆粒表面間的分子結合力(范德華力)、電磁力等。粘連模型受力規律符合JKR理論,其法向接觸力由Hertz理論的無粘連力和粘連表面能組成;切向接觸力來源于顆粒間的滑移、剝離的影響。而賦予適當的粘連表面能,并給定一定的運動加速度,即可使顆粒凝聚形成結塊[23]。根據土壤的粘附特性,最終選擇Hertz-Mindlin with JKR為三七根莖和種植土壤的離散元復合模型,JKR粘結參數可代表根土之間粘結力。根莖和土壤、土壤和土壤間的JKR粘結參數,可通過文獻和參數標定仿真試驗得出,如表3所示。
根據三七壟作種植農藝,為提高仿真效率節約時間,模擬種植壟體農藝要求,設仿真求解區壟體三維尺寸(壟寬×壟高×壟長)為1 500 mm×300 mm×1 000 mm,選擇Dynamic生成方式;三七根莖按標準種植行間距150 mm×200 mm垂直下落到土壤中,數量共3株;土壤顆粒總數量為120 000個,土壤顆粒數目按測定百分比分別為41 940、25 740、26 580、24 740個。根土離散元復合模型如圖9所示。
2 挖掘鏟力學分析
2.1 挖掘三面楔原理分析
三七挖掘過程中,阻力受挖掘鏟幾何形狀、挖掘深度、挖掘鏟入土角度的共同影響,收獲過程中60%~73%的功率消耗于挖掘阻力[24];分析發現挖掘鏟結構符合三面楔受力原理[25],對挖掘鏟三維模型進行簡化,建立挖掘鏟的力學模型如圖10所示。

表3 JKR表面粘結接觸參數Tab.3 JKR surface bonding contact parameters

圖9 三七根莖-種植土壤離散元復合模型Fig.9 Discrete element composite model of rhizome and planting soil of Panax notoginseng
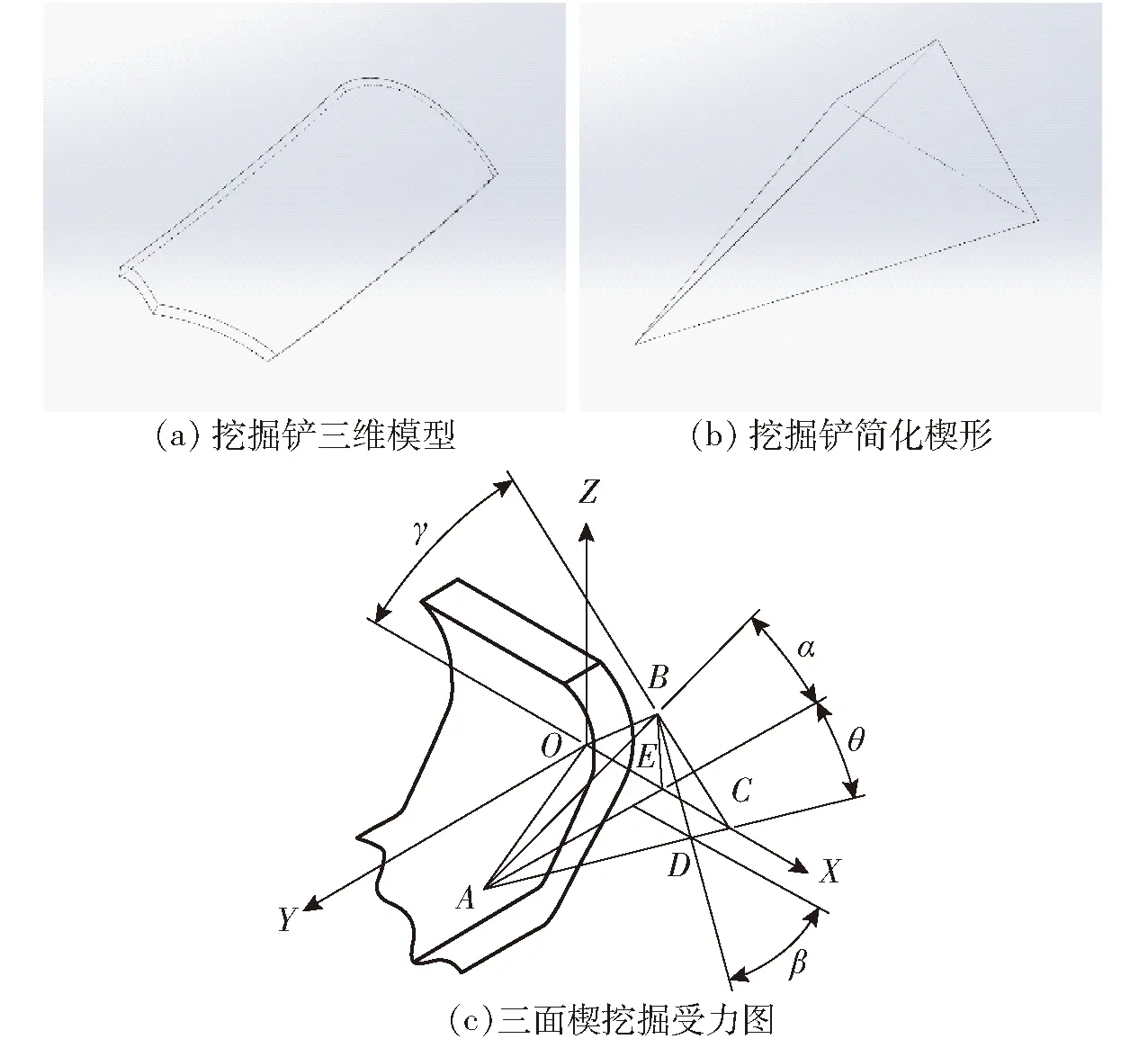
圖10 挖掘鏟三面楔原理分析Fig.10 Principle analysis of excavating shovel wedge
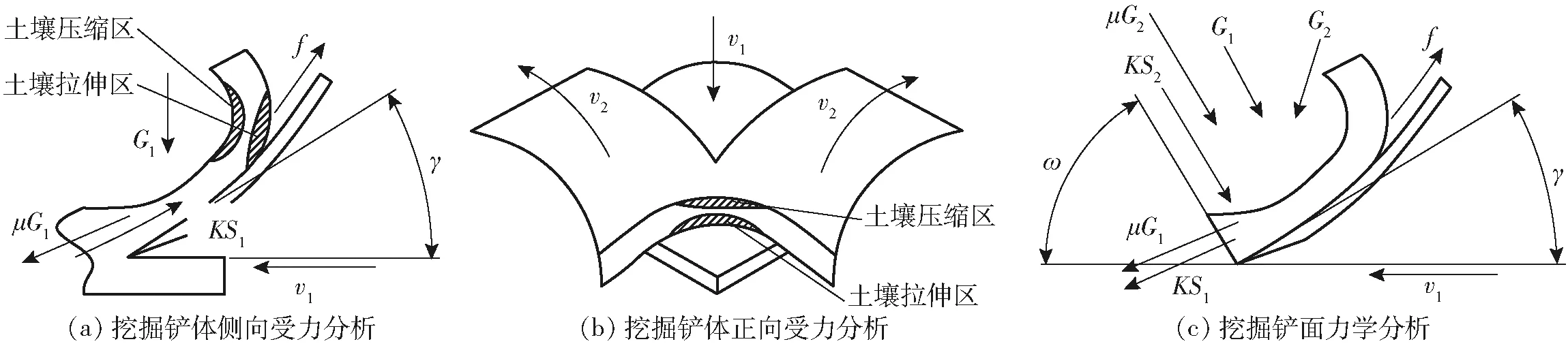
圖11 挖掘鏟受力模型分析Fig.11 Analysis of force model of excavating shovel
據圖10c三面楔挖掘受力關系得出各楔角關系式
(1)
(2)
聯立式(1)、(2)計算得
tanα=tanβtanθ
(3)
式中α——切土載荷角,(°)
β——切土楔角,(°)
θ——鏟面斜角,(°)
γ——入土角,(°)
可知切土載荷角α直接受切土楔角β和鏟面斜角θ影響,根據三面楔對土壤的作用,影響挖掘阻力的因素為切土載荷角α、鏟面斜角θ、入土角γ。
2.2 挖掘鏟鏟面受力分析
土壤的破碎程度取決于挖掘鏟鏟面結構、根土復合體的內部結合、土壤受力后的位移流向等;挖掘過程中根土復合體沿鏟面滑移產生擠壓或拉伸;受土壤含水率影響,土壤對挖掘鏟鏟面形成粘附力和摩擦力。而挖掘的目的就是克服根土的粘結,促使根莖和土壤相對運動,粘結鍵間產生分離斷裂破碎。因此建立挖掘鏟面的力學模型,分析挖掘阻力來源,如圖11所示。
據圖11a得挖掘鏟體側向力學平衡方程式
F1=G1sinγ+(μG1+KS1+fl)cosγ
(4)
G1cosω-G2cosγ+(μ1G1+KS1+fl)cosγ+
KS1cosω-μG1cosω=0
(5)
G1sinω-G2sinγ+(μ1G1+KS1+fl)sinγ+
KS1sinω-μG1sinω=0
(6)
聯立方程(4)~(6)得
(7)
式中F1——挖掘阻力,N
G1——挖掘鏟法向載荷,N
G2——挖掘鏟橫向載荷,N
l——挖掘部件幅寬,mm
K——土壤附著力,N/cm2
S1——挖掘部件接觸面積,cm2
f——純切削力,N
ω——阻力角,(°)
μ——土壤與金屬摩擦因數
v1——挖掘鏟前進速度,m/s
v2——鏟面土壤滑切速度,m/s
Z——常數
根據挖掘鏟力學模型可知,挖掘阻力受挖掘鏟幾何尺寸、土壤附著力、根土粘結力、入土角度、挖掘速度等因素的影響。其中根土粘結力、挖掘鏟幾何尺寸、入土角度影響最為直接。對挖掘阻力F1進行多元求導求得入土角γ和阻力角ω的最小值。
(8)
計算得入土角γ和阻力角ω越靠近45°時挖掘阻力F1越小。參考文獻[7-8]得入土角γ范圍為22°~33°、阻力角ω范圍為28°~35°,仿生挖掘鏟體設計尺寸(長×寬×厚)為360 mm×150 mm×8 mm、鏟尖半角60°。
3 三七仿生挖掘鏟設計
動物的生存本能進化出適應自然的生理構造,也為分析和解決農業問題提供了思路。目前已有學者利用螻蛄爪趾的拋挖優勢設計旋耕刀具[2];模擬天牛牙齒的嚙合過程設計切割刀刃部[5]。其中野豬頭鼻部對土壤的翻動、拱抬、擠壓、破碎與挖掘鏟的作用十分相似[26],借鑒野豬頭鼻的挖掘優勢,對野豬頭鼻部分進行逆向工程建模提取點云數據,應用于三七仿生挖掘鏟的幾何設計。
3.1 野豬頭鼻部建模
野豬的毛發對三維掃描儀的識別有干擾,為避免造成混淆,忽略野豬頭鼻部的毛發進行掃描,采集點云數據建立模型。首先在豬頭上標記定點標識,通過環繞掃描建立三維模型,利用后處理軟件去除噪點、修剪和光滑細節,結果如圖12所示。
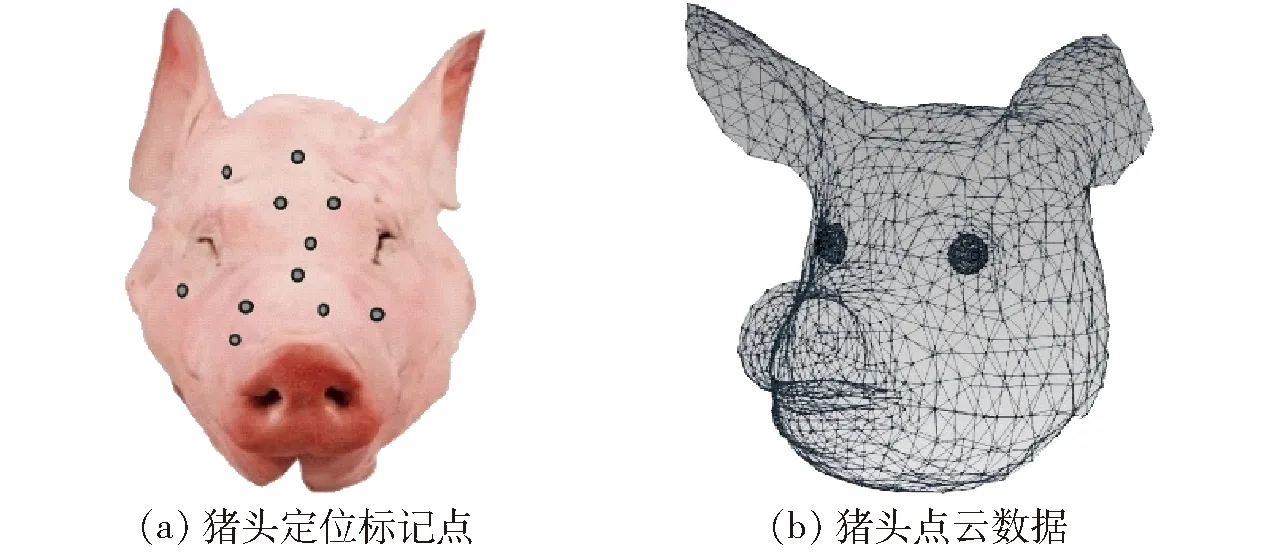
圖12 豬頭三維掃描建模Fig.12 Three-dimensional scanning modeling of pig head
3.2 仿生挖掘鏟結構設計
采集到豬頭鼻部的三維模型后,通過SolidWorks對豬頭鼻部的正面曲線、側面曲線進行散點坐標采集并進行二次項擬合,根據挖掘鏟設計參考尺寸要求選擇擬合曲線的長度范圍,仿生挖掘鏟由正向3條間隔90 mm的素線和側向1條正脊線構成,結構如圖13所示。
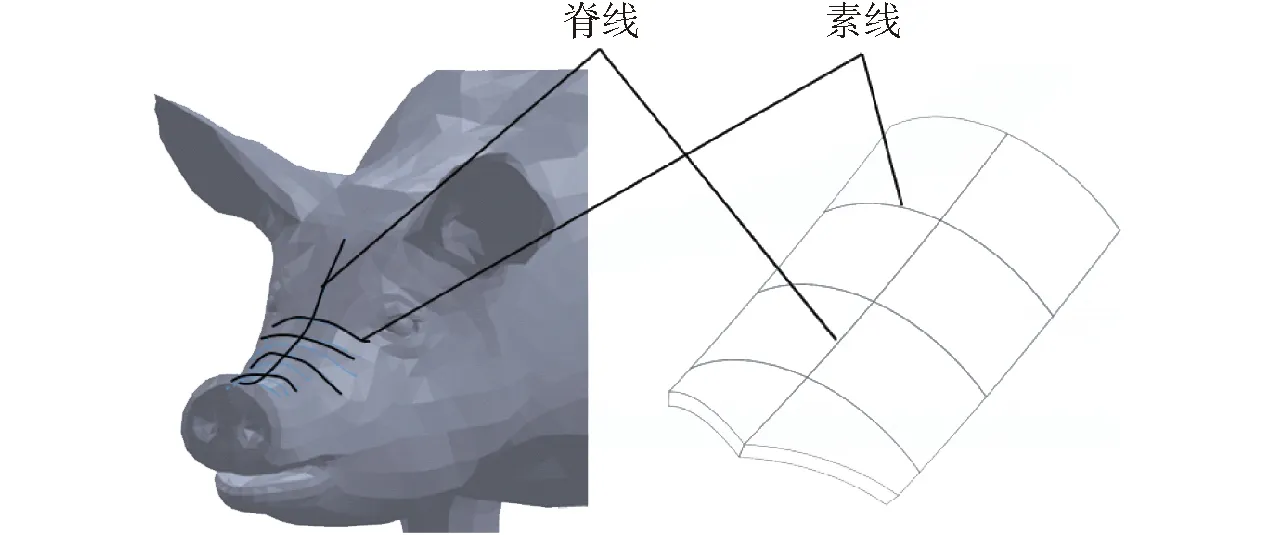
圖13 仿生挖掘鏟素線、脊線示意圖Fig.13 Schematic of bionic excavation shovel line and ridge line

圖14 仿生挖掘鏟三維模型Fig.14 3D model of bionic excavating shovel
對素線及脊線的散點坐標進行二次項曲線擬合,考慮挖掘鏟的建模便利,將脊線擬合曲線最低點移動至坐標原點,素線擬合曲線調整為偶函數,得到最終擬合曲線方程,素線1、2、3擬合方程為:y1=-0.021 0x2+2.33(R=0.983 0)、y2=-0.018 2x2+6.47(R=0.993 7)、y3=-0.021 6x2+10.68(R=0.972 4),脊線y4=0.039 6x2-0.062 2x+0.318 3(R=0.997 6)。據素線脊線方程及設計參考尺寸,根據農藝要求設挖掘鏟總成幅寬為1 500 mm,考慮挖掘鏟片間隙的漏土作用,設置鏟片間隙為75 mm,共7個鏟片,仿生挖掘鏟的設計尺寸(長×寬×厚)為360 mm×150 mm×10 mm、鏟尖半角60°。通過SolidWorks設計三七仿生挖掘鏟,如圖14所示。
4 仿真試驗
目前三七采挖大多采用平面挖掘鏟,平面挖掘鏟制造簡單、受力情況易于分析、影響挖掘的因素較少,且對比試驗主要考察仿生挖掘鏟鏟面結構的優勢,故開展仿生挖掘鏟與平面挖掘鏟的對比試驗。為消除尺寸因素對試驗結果的影響,平面挖掘鏟的設計尺寸和仿生挖掘鏟基本一致,考慮加工工藝而略有調整,平面挖掘鏟的設計尺寸(長×寬×厚)為358 mm×140 mm×8 mm、鏟尖半角60°。用SolidWorks進行建模,結果如圖15所示。挖掘總幅寬1 500 mm,鏟片間隙為87 mm,鏟片數量為7。

圖15 平面挖掘鏟三維模型Fig.15 3D model of plane excavation shovel
4.1 挖掘過程對比試驗
模擬三七收獲挖掘作業過程開展仿真試驗,1~25 s時設置物理本征參數等,生成根土離散元復合模型;加載挖掘鏟模型設置入土角為30°、挖掘深度為260 mm,添加挖掘鏟的Linear-Translation直線運動,運動速度為1 m/s,仿真時間步長為0.1 s,仿真總時長為25~30 s,挖掘作業時長為5 s。其中25~26 s為挖掘鏟初始入土階段,26~29 s為連續工作階段,29~30 s為挖掘阻力急劇上升且穩定階段。為便于觀察,對仿真對比試驗結果剖切觀察,如圖16所示。
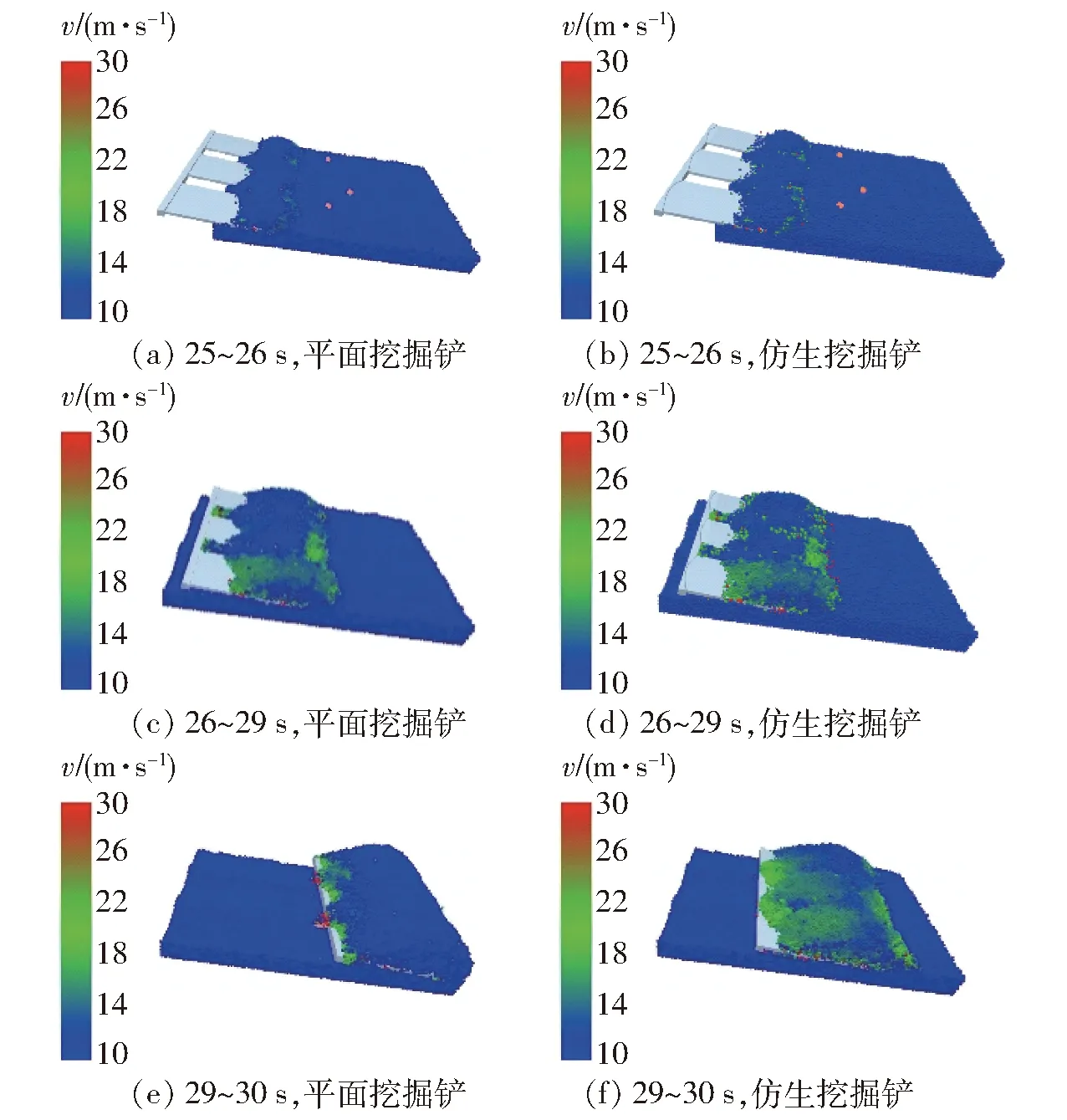
圖16 仿真挖掘對比試驗剖視圖Fig.16 Simulation mining comparative test section views
由圖16對比知,在25~26 s挖掘入土階段,挖掘鏟鏟尖入土后土壤開始出現擾動;26~29 s挖掘鏟完全入土連續作業,根土離散元復合模型沿鏟面向后滑移,鏟面土壤顆粒開始堆積,鏟體四周的土壤粘結失效區域范圍變大,對比發現此時仿生挖掘鏟鏟面邊緣土壤顆粒流動性大于平面鏟面;在29~30 s時,挖掘阻力開始急劇上升,平面鏟鏟面出現壅土現象,仿生鏟鏟面、鏟面邊緣、鏟尖的土壤顆粒仍保持優于平面挖掘鏟的滑移速度。
4.2 顆粒位移流向對比試驗
仿真試驗中顆粒位移流動間接反映離散元模型受力后的變化情況,可作為挖掘鏟面結構優良的評價方法之一。對平面和仿生鏟面上的根莖顆粒和土壤顆粒進行位移流向追蹤,計算顆粒受力后的三軸X、Y、Z軸平均位移距離,根據位移流向曲線的變化,對比兩種挖掘鏟面結構對根土離散元復合模型的位移作用,作為挖掘鏟減阻的依據。
4.2.1三七根莖顆粒位移流向對比
三七采挖過程中,根莖受到土壤粘結力、挖掘前進速度的共同作用。根土復合體被挖起后,隨鏟面向后運動,根土間產生拉伸破碎、壓縮破碎以及剪切破碎現象,導致土壤破碎流動、根莖滑移,如圖17所示。
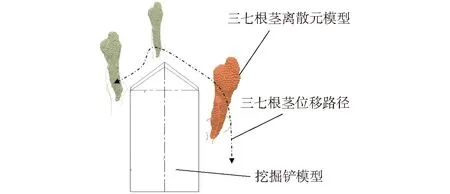
圖17 仿真試驗根莖顆粒位移流向示意圖Fig.17 Simulation test of displacement and flow direction of rhizome particles
截取25~30 s的仿真過程,通過EDEM后處理模塊和Origin軟件分析得到時間-位移曲線,如圖18所示。分別對7片鏟面進行位移曲線提取,圖例1~7為挖掘鏟各鏟片序號,圖18a、18b為X方向(挖掘前進方向)的運動;圖18c、18d為Y方向(鏟面橫向)的左右滑移運動;圖18e、18f為Z方向(垂直于鏟面)的上下運動;分析可知平面鏟挖掘時三七根莖位移主要在X向,X向平均位移為316.93 mm,Y向和Z向的位移變化不大,Y向與Z向的平均位移為60.47、67.98 mm;仿生鏟挖掘時三七根莖3個方向都有較好的位移表現,且隨仿真時間呈上升趨勢,平均位移為X向341.13 mm、Y向190.17 mm、Z向179.95 mm。
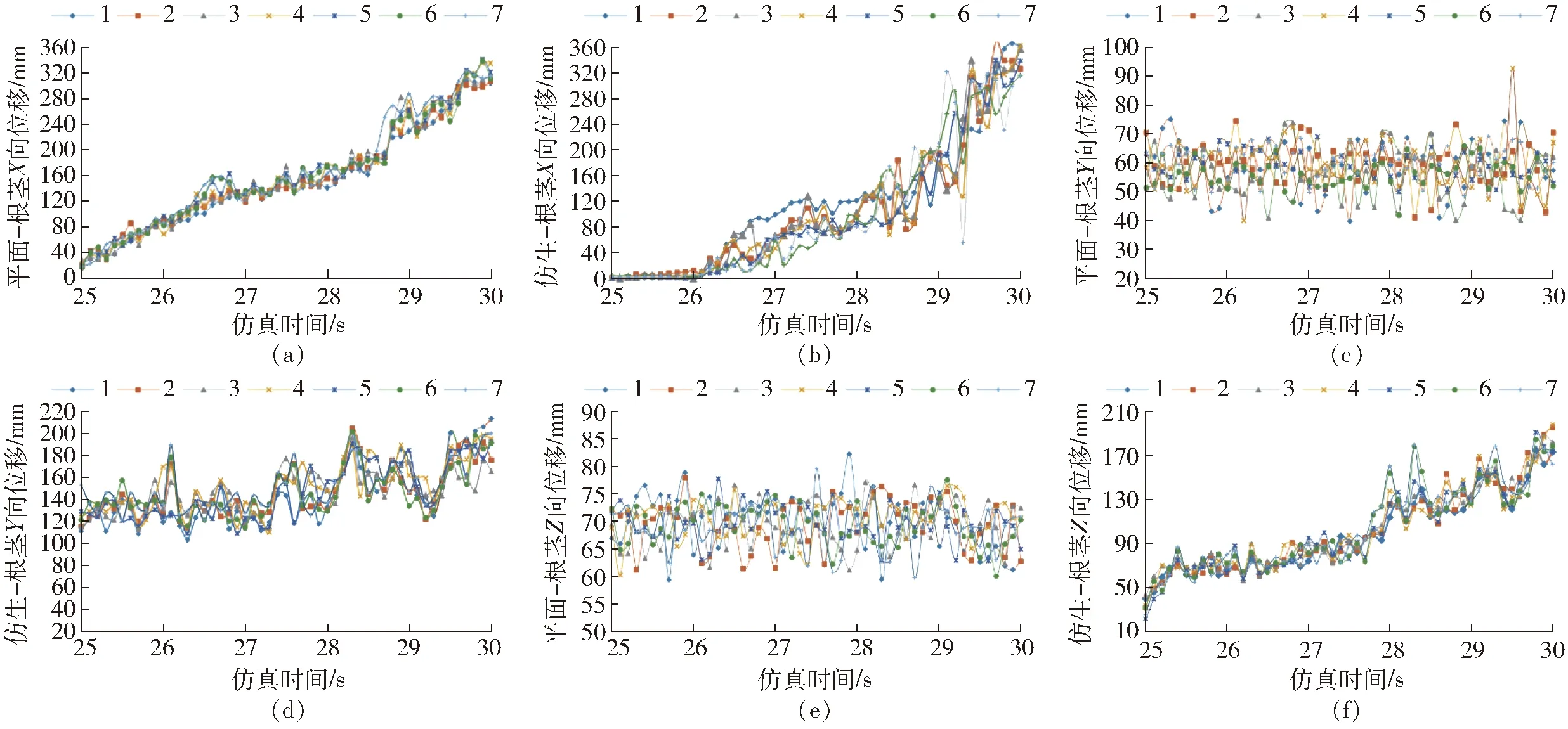
圖18 根莖位移仿真曲線Fig.18 Simulation test root displacement distance
4.2.2土壤顆粒位移流向對比
仿真試驗中,由于土壤顆粒數量巨大,難以捕捉到每個顆粒的位移,故選擇挖掘鏟尖入土時首先接觸的土壤顆粒,分別對平面鏟和仿生鏟鏟尖首先接觸的土壤顆粒進行位移流向追蹤,并計算X、Y、Z軸的平均位移,分析土壤顆粒的位移流向趨勢,一定程度上可表示挖掘過程中土壤顆粒的位移流向情況。截取25~30 s挖掘全過程時段,土壤顆粒運動如圖19所示。
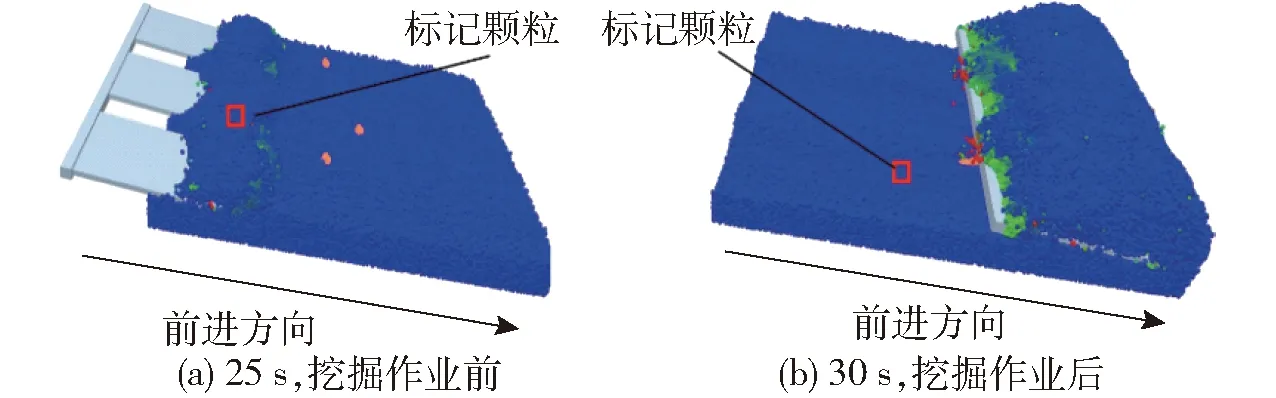
圖19 土壤顆粒位移流向結果Fig.19 Simulation tests of soil particle displacement direction

圖20 土壤顆粒位移仿真曲線Fig.20 Simulation tests of soil particle displacement distance
使用EDEM后處理功能導出數據,通過Origin軟件分析得到25~30 s的時間-位移曲線,如圖20所示。對比分析X向位移(圖20a、20b)可知,仿生挖掘鏟和平面挖掘鏟的X向平均位移分別為310.03、286.72 mm,在26~28 s時挖掘鏟開始連續作業,土壤顆粒開始堆積,土壤顆粒出現抖動堆積上升,在28~30 s時到達要求挖掘深度260 mm,位移曲線變化趨于平直;對比分析仿生挖掘鏟和平面挖掘鏟的Y向和Z向的位移(圖20c、20d與圖20e、20f)可知,仿生鏟面的結構優勢開始凸顯,Y向和Z向的平均位移皆優于平面挖掘鏟,Y向平均位移為173.35、115.36 mm,Z向平均位移為122.52、94.67 mm;在Y向28~30 s時,仿生挖掘鏟位移曲線相較于平面挖掘鏟上升趨勢較快,土壤顆粒在連續作業時沿著仿生鏟面橫向滑移從而減少壅土現象;在Z向25~26 s時,挖掘鏟入土的初始階段,土壤顆粒沿著鏟尖和鏟面上升,位移曲線出現波動,在26 s后受限于入土角度和鏟體長度,仿生鏟和平面鏟的位移曲線變化趨于平穩。通過對比分析土壤顆粒的三軸位移曲線趨勢可知,仿生鏟面的顆粒流動性優于平面鏟面。
4.3 減阻性能對比試驗
對挖掘阻力進行分析,由式(7)可知挖掘鏟阻力受挖掘鏟尺寸、土壤附著力、根土粘結力、入土角度、挖掘前進速度、摩擦因數等共同影響;選用JKR模型模擬根土粘結關系建立根土離散元復合模型,旨在利用仿真試驗分析挖掘阻力大小和來源,通過仿真試驗可知挖掘阻力主要在X向,利用EDEM后處理Analyst模塊導出所有挖掘鏟面的X向阻力值,通過Origin軟件分析25~30 s時的阻力曲線。衡量挖掘阻力的指標是減阻率,對比挖掘阻力變化曲線并計算最大減阻率,減阻率計算公式為
(9)
式中Fp——平面挖掘鏟所受最大阻力,N
Ff——仿生挖掘鏟所受最大阻力,N
25~30 s時挖掘阻力仿真曲線如圖21所示,阻力曲線顯示挖掘鏟在28.5~29 s時達到阻力峰值,在29 s后阻力曲線開始趨于穩定。圖21a為平面挖掘鏟阻力,平面鏟在26~27 s時產生挖掘阻力波動,27 s時開始入土深入后,在28 s后挖掘阻力開始激增趨勢,29~30 s進入連續作業狀態挖掘阻力開始趨于穩定,所受平均最大阻力為1 929.32 N,同一時刻的挖掘阻力遠大于仿生挖掘鏟;圖21b為仿真挖掘鏟阻力,仿生鏟在27~28 s時,由于鏟面結構作用,阻力開始突變上升繼而下降后又開始上升,在29 s后達到最大阻力階段,仿生鏟所受平均最大阻力為1 559.76 N;相較于平面挖掘鏟所受最大阻力,仿生挖掘鏟的挖掘減阻率為19.15%。

圖21 挖掘鏟阻力仿真曲線Fig.21 Comparative simulation tests of excavating shovel blocked
4.4 挖掘機理分析
為探究挖掘機理,明晰挖掘阻力產生的原因,截取挖掘阻力最大時刻29 s的局部放大圖,利用后處理工具Analyst將土壤顆粒運動轉變為矢量圖。如圖22所示,其中矢量箭頭指向表示方向、長短表示速度大小、顏色為速度變化趨勢;通過分析挖掘鏟周邊顆粒的速度矢量流向,判斷阻力最大時顆粒的運動狀態和運動趨勢,結合鏟面結構進行分析。
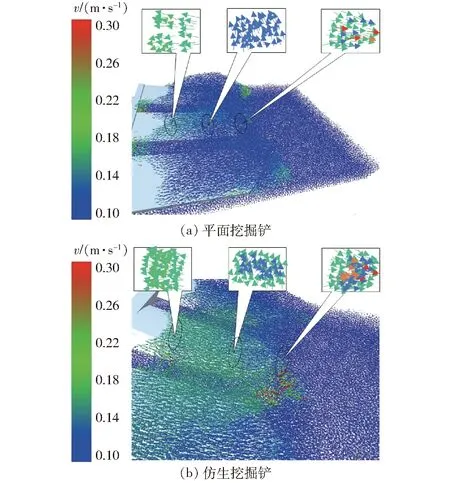
圖22 土壤顆粒運動矢量圖Fig.22 Soil particle motion vector maps
在29 s時,挖掘鏟周圍的土壤顆粒速度有了明顯變化,鏟面邊緣土壤顆粒受到擾動最大,相對速度較快呈現紅色;鏟面前端土壤顆粒速度方向與X向一致,挖掘阻力向前;鏟面中端土壤顆粒速度方向逐漸變為Z向,挖掘阻力由側面開始向上,開始堆積形成壅土現象;同一時刻,仿生挖掘鏟周邊的土壤顆粒流動速度大于平面挖掘鏟,土壤顆粒速度流向四散;鏟面后端承載土壤顆粒相對較少,沒有明確的矢量流向。通過分析土壤顆粒速度流向可知,挖掘阻力主要來自鏟面前中端受力。
相較平面挖掘鏟,仿生鏟面為仿生曲面結構,正向和側向兩面都是曲面結構,根土離散元復合體在三軸方向都會產生破碎、滑移、滾動,速度流向呈現空間發散趨勢,這說明仿生鏟面具有良好的土壤流動性和結構引流作用,鏟面承載的土壤顆粒數量下降減少壅土,由此仿生挖掘鏟的挖掘阻力減小。
通過仿真對比試驗,對三七根莖、種植土壤顆粒進行了位移流向追蹤比較、挖掘阻力曲線變化對比、分析了鏟面的挖掘機理,仿真結果表明仿生挖掘鏟的顆粒流動性優于平面鏟,所受挖掘阻力更小,有良好的減阻性,仿真試驗初步驗證了仿生挖掘鏟的仿生設計理論分析準確、結構合理可行。
5 試驗
5.1 試驗儀器及設備
試驗場地為云南省中藥材機械化研究中心,試驗平臺為第三代溫室自走式三七收獲機,加裝仿生挖掘鏟和平面挖掘鏟在種植土槽中進行試驗,如圖23所示。自走式三七收獲機參數如表4所示。

圖23 試驗場地及阻力采集設備Fig.23 Test site and resistance collection equipment
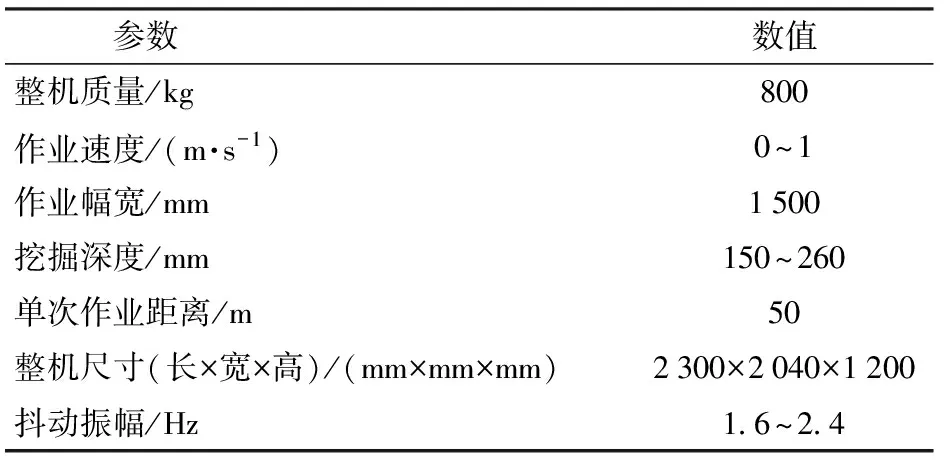
表4 第三代溫室自走式三七收獲機參數Tab.4 Parameters of the third generation greenhouse self-propelled Panax notoginseng harvester
挖掘阻力采集設備為INV3018CT型便攜式采集儀。選用電阻式應變片,將應變片進行橫向和縱向標定得標定曲線方程,為保證試驗精度將應變片長度方向與前進方向布置一致,應變片為BX120-50AA型電阻應變片、電阻(119.9±0.1) Ω、靈敏系數1.08%~3.08%、精度等級A級,應變片尺寸(柵長×柵寬)50 mm×3 mm、標定曲線方程y5=97.441x-69.497,試驗場地及阻力采集設備如圖23所示。
利用千眼狼高速攝像機進行圖像采集。采集系統由高速攝像機、便攜式計算機、三腳架、光源燈、數據線、電源線等組成(圖24)。為避免采集圖像失擬,將高速攝像機垂直布置于整機前進方向側向,鏡頭與地面的垂直距離為1 300 mm,與地面水平夾角為35°,調試后確保圖像清晰無縮放,試驗時還需要調整光源對準挖掘鏟鏟面。
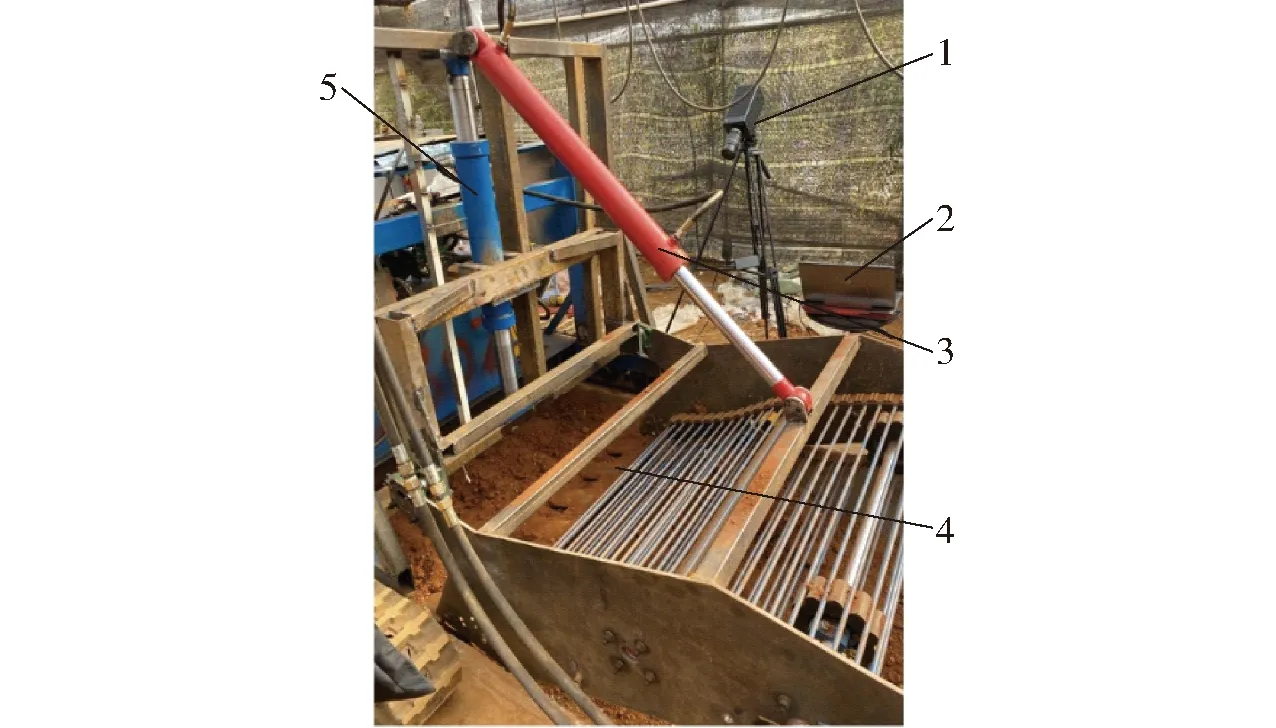
圖24 高速攝像試驗裝置Fig.24 High-speed photographic test device1.千眼狼高速攝像機 2.便攜式計算機 3.入土角度調節油缸 4.挖掘鏟 5.挖掘深度調節油缸
5.2 土槽試驗
5.2.1土壤顆粒位移流向試驗
利用千眼狼高速攝像機采集圖像以驗證位移流向試驗結果。大田環境下三七根莖被土壤包裹,挖掘運動過程中土壤易掩埋三七,高速攝影難以捕捉和觀察根莖位移流向,故土槽試驗只考慮土壤顆粒流向,調節收獲機行進速度為1 m/s、挖掘深度260 mm、入土角30°,為保證試驗數據精準,將土槽分為加速區0~2 m、中間有效距離區2~8 m、減速區8~10 m。設置高速攝像機時間分辨率為1 000 f/s,采集時間6 s。捕捉仿生挖掘鏟周圍的土壤顆粒流向(圖25),基本與仿真土壤顆粒流向趨勢一致。

圖25 高速攝影捕捉的土壤顆粒流向Fig.25 High-speed photography captured flow of soil particles
5.2.2挖掘鏟阻力試驗
進行挖掘阻力對比土槽試驗,云南溫室三七種植土槽深度0.5 m、槽寬1.5 m、槽長50 m,收獲機行走速度為1 m/s,試驗距離為10 m,同樣為保證試驗的準確性,取土槽0~2 m為整機加速區、2~8 m為有效試驗距離區、8~10 m為整機減速區;為保證試驗精度,5組試驗后校正電阻應變片1次;試驗先取得空載阻力,待挖掘深度達260 mm后測得相對挖掘阻力,與空載挖掘阻力之差即實際挖掘阻力值,然后計算仿生挖掘鏟的土槽試驗減阻率。結果如表5所示。

表5 挖掘阻力田間對比試驗結果Tab.5 Field contrast test of excavation resistance
綜上,仿生挖掘鏟和平面挖掘鏟的平均最大阻力為1 207.23、1 594.49 N,仿生挖掘鏟的平均減阻率為24.29%,土槽試驗證明仿生挖掘鏟的減阻特性優于平面挖掘鏟,且與仿真試驗的減阻率19.15%相比誤差在可控范圍內,證明三七根莖及種植土壤的離散元復合模型準確可靠,仿生挖掘鏟的力學模型準確,幾何設計合理可行。
6 結論
(1)對三七根莖和種植土壤進行物理參數測定,采用三維掃描逆向工程技術建立三七根莖的三維模型,分析濕潤土壤和根莖間的粘結機理關系,結合三七種植農藝,準確建立了根土復合的JKR離散元粘結模型,為挖掘對比仿真試驗的開展做準備。
(2)簡化挖掘鏟對于土壤的挖掘作用,建立并分析挖掘鏟的理論力學模型,確定仿生挖掘鏟的基本設計參數取值,采集野豬頭三維模型的鼻部點云數據,擬合散點求得仿生設計曲線的表達式,利用SolidWorks建立仿生挖掘鏟的三維模型。
(3)開展挖掘仿真對比試驗,對根莖顆粒和土壤顆粒進行X、Y、Z三軸位移流向追蹤,仿生挖掘鏟面的三軸顆粒位移大于平面挖掘鏟,所受平均挖掘阻力小于平面挖掘鏟,得仿生挖掘鏟的仿真試驗減阻率為19.15%;對比仿生挖掘鏟和平面挖掘鏟的挖掘過程,可知仿生鏟面由于仿生曲線結構,相較于平面挖掘鏟具有更好的引流和減阻作用。
(4)開展土槽對比試驗,利用高速攝像機對土壤顆粒進行追蹤,驗證了土壤顆粒流向與仿真結果趨勢一致;利用電阻應變片采集挖掘阻力計算得仿生挖掘鏟的平均減阻率為24.29%。與仿真試驗減阻率19.15%相比誤差可控,證明了離散元模型建立準確可靠,仿生挖掘鏟的力學模型分析準確,仿生幾何設計合理可行,能夠滿足三七挖掘的減阻要求。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
