基于ACME的井中激電系統采集控制軟件開發與應用
2022-06-22 09:33:14謝興兵毛玉蓉嚴良俊
吉林大學學報(地球科學版) 2022年3期
關鍵詞:系統
席 彪,謝興兵,毛玉蓉,嚴良俊,周 磊
1.油氣資源與勘探技術教育部重點實驗室(長江大學) ,武漢 430100 2.非常規油氣湖北省協同創新中心,武漢 430100
0 引言
井中激發極化法(borehole induced polarization,以下簡稱井中激電或井中IP)通過在鉆井中完成地面激發極化的方法進行深地勘探,因其對深部隱伏礦產勘查的優勢而廣泛應用于銅礦以及多金屬礦藏的勘探[1-3]。普通電阻率測井近十幾年廣泛應用于水文地質、巖石物理等領域,但較少應用于油氣及金屬礦產開發,其主要原因是普通電阻率測井難以區分低阻低極化率圍巖和低阻高極化率礦產。而井中IP是勘查多金屬和貴金屬硫化物等高極化率礦床,尤其是尋找深部盲礦體優先選用的有效井中物探方法[4-6]。該方法可充分依靠已知的鉆孔信息,在發現井旁、井底盲礦,追索礦化帶,估計見礦深度,查證地面激電異常等方面發揮重要作用。在老礦山、危機礦山等勘查中,利用已有的鉆孔開展地-井、井-地等激發極化勘探和解釋工作,探查井附近盲礦體或礦體空間延伸情況,能大大提高鉆探見礦率和找礦效果,減少勘探成本,并能顯著提高勘探效率,為深部找礦提供重要指示[7-10]。
現階段國內外激電系統研制與開發大多以地面探測為主,部分儀器支持井-地模式,即井中發射地面采集模式。對于采集系統位于井中且同時支持井-井、地-井模式,即井中發射鄰井采集和地面發射井中采集模式的激電系統研發較少,且發射功率均小于20 kW,勘探深度尚未突破1 000 m,難以滿足深度3 000 m內50 kW大功率井中礦產資源探測需求[11-13]。
針對深度3 000 m內井中激發極化法礦產資源探測成套技術能力要求,圍繞井中不同激發模式下礦體的激發極化響應特征及弱信息識別科學問題,通過理論方法研究和技術創新,解決高溫高壓條件下小井徑(50 mm)大功率發射裝置的系統設計和實現、井中/井間時間域和頻率域激發極化及充電法弱信息采集、提取與影響因素校正等技術難題,實現從方法、硬件、軟件和資料解釋應用等方面的創新,形成了井中/井間激發極化探測技術[14]。相比地面激電采集,井中激電系統控制采集軟件克服高溫高壓條件下的弱信號數據采集、長距離遙傳通訊、數據高速傳輸、接收和發射同步等技術難題成功研發。
采集控制管理平臺(acquisition control management expert,ACME)是中國石油測井公司自主研發EILog(express and image logging system)測井系統的重要組成部分,ACME采集軟件根據不同儀器實現了測井儀器組件庫的動態添加和卸載,可擴展性強[15-17]。本文基于ACME采集軟件提供的SDK(software development kit)二級開發軟件包,生成儀器組件開發框架,將井中激電系統采集控制軟件掛接在ACME上,實現激電系統的采集、實時傳輸、顯示、監測、保存和處理成圖等功能,并成功應用于大冶市銅鐵金屬礦的井中探測,達到了預期效果。
1 井中激電系統簡介
1.1 井中激電系統工作方式
井中激電系統根據具體功能可以分為發射系統、井中采集系統、地面(遙傳)通訊系統和采集控制軟件4個部分。以地-井模式為例,工作方式通常采用三極裝置,如圖1所示,發射系統通過給置于井口位置的供電電極A和距離井口無窮遠處的供電電極B供電,向地下發射電信號,操作員通過采集控制軟件使位于井中M、N處的采集系統開始采集并將采集到的電位和電位差數據通過地面(遙傳)系統實時傳回到位于地面的計算機中,并保存數據。
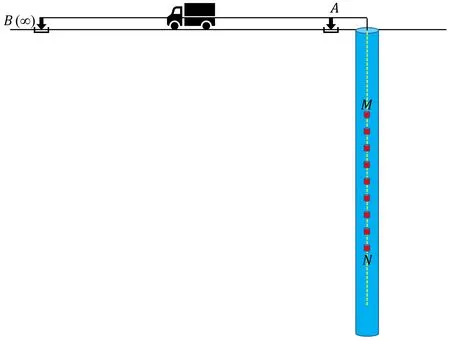
圖1 井中激電系統地-井模式工作方式
1.2 發射系統
發射系統主要由兩部分組成,分別為大功率恒流恒壓發電機組和大功率恒流恒壓發射機。大功率恒流恒壓發電機提供動力源,大功率恒流恒壓發射機將發電機提供的動力轉換成激發極化需要的特定波形輸出,并能夠檢測和記錄波形的幅值和相位。整個發射系統具備恒壓和恒流兩種模式,滿足不同的作業條件。發射系統最大輸出電壓為2 500 V,最大輸出電流為20 A,最大功率為50 kW,電壓和電流大小連續可調。發射系統可以發射時間域不同周期雙極性占空比為50%的波形(TD50)、頻率域不同頻率不過零方波(FD)和編碼偽隨機波形。發射系統具備高精度GPS和恒溫晶振系統,通過GPS系統與采集控制軟件進行對時和同步。
1.3 井中采集系統
為滿足小井徑3 000 m深度內井中激電法礦產資源探測的要求,井中采集系統設計直徑小于50 mm,儀器外部套管、接收電極全部采用鈦鋼和玻璃鋼等耐高壓材料密封設計,內部全部使用耐高溫元器件。經過高溫高壓釜測試,儀器設計加工滿足高溫高壓(155 ℃、100 MPa)指標要求,驗證了井中環境作業的可行性。
井中采集系統包括采集子節點和系統主控節點。采集子節點主要功能是采集電位和電位差信號,井下多儀器工作時,為了防止不同儀器相互之間命令沖突,需要搭建穩定的通訊網絡,本系統通過采用CAN(controller area network)總線實現陣列式通訊結構。采集子節點將數據通過CAN總線傳輸至主控節點。主控節點主要功能是進行總線仲裁和數據上傳,從而實現儀器內部數據傳遞。
井中采集系統采用了全波形陣列觀測裝置,通過9個采集子節點可以同時采集9個電位數據和8個電位差數據。相比傳統單道激電接收機,井中全波形陣列觀測裝置不僅可以提升儀器分辨率,還可以在相同采集周期內獲得更豐富的數據信息,極大提高了采集效率。不同采集子節點之間相互獨立采集,且各接收電極距可以自由調節,得到不同電極距的多道采集數據,削弱噪音的干擾,大幅提高了抵抗外界干擾的能力,從而得到更高質量的數據。
1.4 地面(遙傳)通訊系統
遙傳技術已經廣泛應用的測井系統,可以將井中深度幾千米儀器所測數據準確地傳輸到地面系統[18]。采集控制軟件下發命令,再通過遙傳通訊以數據幀的形式發送,隨后緊接著發送一個遠程幀。儀器在接收遙傳下發的命令后切換工作模式,在接收隨后的遠程幀之后,將采集好的數據通過遙傳通訊上傳報文。
2 采集控制軟件開發
2.1 采集控制軟件簡介
井中激電系統采集控制軟件是整個系統工作的中樞,為了更好地服務井中激電系統工作,實現高溫高壓條件下的數據采集、長距離遙傳通訊、數據高速傳輸、接收和發射同步等需求,本文基于ACME測井采集軟件平臺開發了井中激電系統采集控制軟件。ACME服務于不同種類測井儀器控制軟件開發,通過軟件組件化技術,極大地提高平臺擴展性、可維護性以及穩定性。為適應不斷研發新儀器的特點,組建了一套相對獨立的組件庫,滿足不同儀器的設計與開發。本軟件通過ACME主控程序提供的儀器組件接口、儀器通訊接口、平臺服務組件接口和儀器屬性接口等協議實現了儀器屬性的基本訪問[19]。
C++語言是基于C語言發展起來的一種面向對象的編程語言,可以直接對硬件操作訪問物理內存等,擁有很好的運行效率[20]。微軟公司針對C++語言開發平臺內置的基礎類庫MFC(Microsoft foundation classes)包含大量Windows的內建控件和組件的封裝類進行高效的GUI(graphical user interface)開發,減少了應用程序開發人員的工作量。在Visual Studio平臺將采集控制軟件封裝為動態庫,再將動態庫添加到ACME主控程序的組件庫中,實現采集控制軟件在ACME上的掛接。
2.2 界面設計
為了便于操作員井場作業,井中激電系統采集控制軟件GUI設計簡潔。交互界面根據工作流程對應模塊可以劃分為文件保存參數信息設置區(圖2a)、儀器工作狀態監測區(圖2b)、儀器采集控制區(圖2c)、增益參數設置區(圖2d)和數據質量監測區(圖2e)5個區域。
2.3 軟件工作流程設計
井中激電系統采集控制軟件主要分為儀器工作模式控制、數據實時監測、增益設置和數據保存等模塊。工作流程如圖3所示。測井開始后首先與儀器進行通訊測試,發送通訊測試模式命令并確認儀器工作狀態是否正常。通訊正常后用子節點接收電極采集標準電壓進行標定,并保存儀器標定數據。在儀器標定成功后將儀器下井,到達目的層后發送采集模式命令,通過實時數據監測適當調整各采集子節點增益。確認儀器工作狀態及數據質量無誤后設置保存文件信息,保存數據。
儀器工作模式控制模塊主要分為儀器通訊測試模式、儀器標定模式、采集模式以及采樣率設置模式。數據實時監測模塊分為單次報文數據監測和長時間全波形實時監測。單次報文數據監測的主要目的是判斷儀器增益調整以及數據傳輸的正確性;長時間全波形實時監測的作用是整體把控多次采集數據,以及監測整個測井過程的數據質量。增益設置模塊的作用是根據數據實時監測,針對信號微弱數據或過飽和數據采集子節點實時調整增益,有效解決弱信息采集問題,同時避免出現過飽和數據的情況。數據保存模塊的功能主要是將發射源信息、測井方法和測井模式等參數信息(表1),以及原始報文解碼后的數據(表2)保存到las文件。
3 數據預處理
3.1 數據解碼
地面接收到儀器的原始報文數據是十六進制的32位無符號整數,需要將原始數據轉換為十進制數,計算得到實測電位或電位差:
V=Ndata·Q·kVGA。
(1)
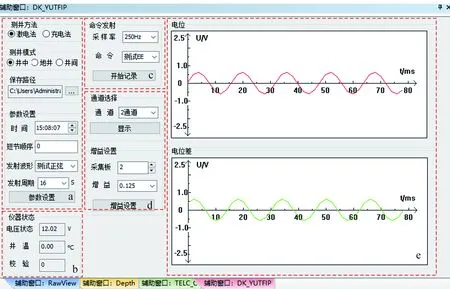
圖2 井中激電系統采集控制軟件界面
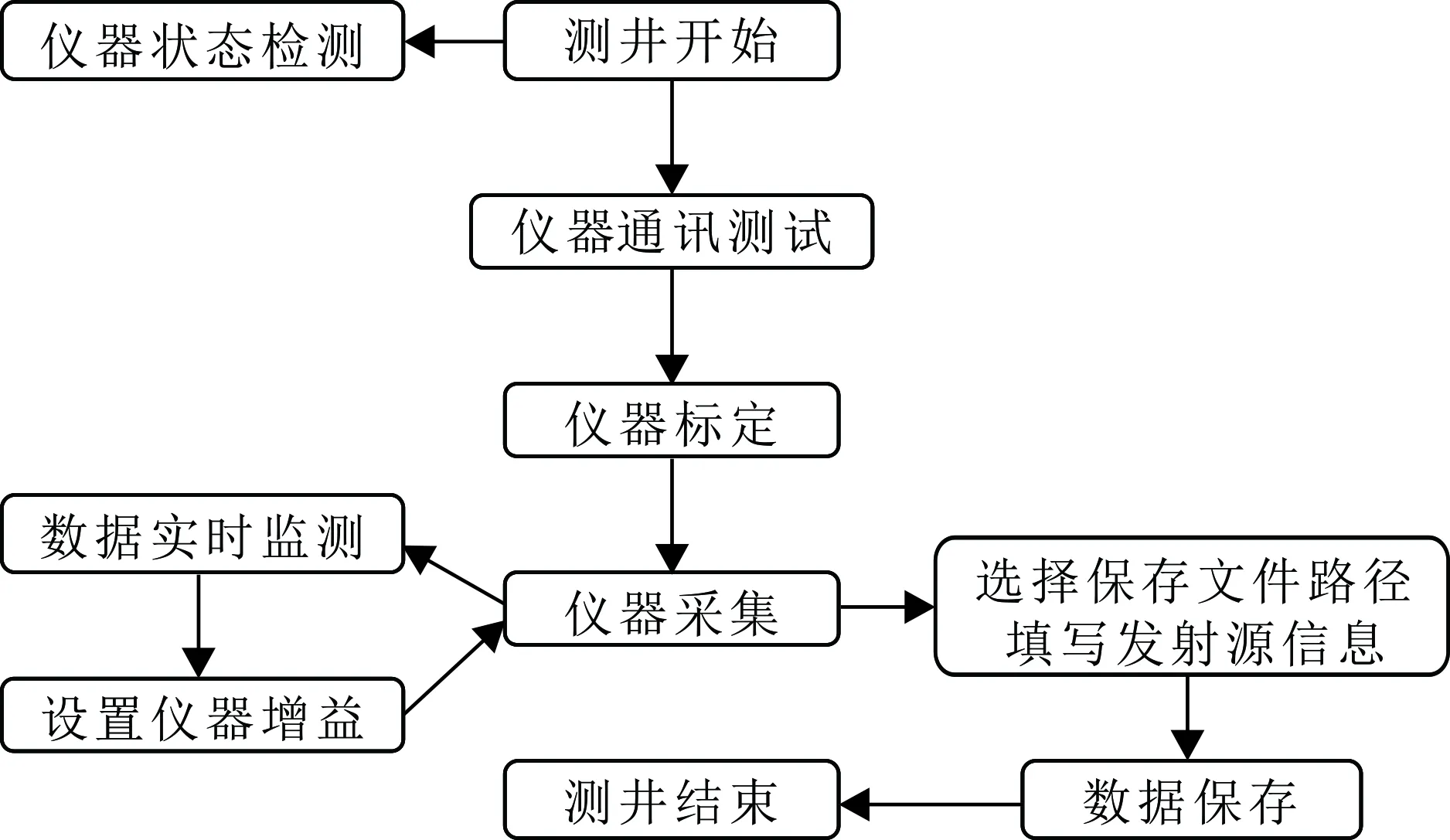
圖3 井中激電系統采集控制軟件工作流程
式中:V為實測電位或電位差;Ndata為原始報文數據轉換后的十進制數據;Q為模數轉換算子;kVGA為儀器增益系數。
3.2 數據傳輸驗證
接收到上傳的報文后,對固定格式的報文頭進行識別,避免井中采集系統報文傳送錯誤。報文頭識別成功后,再對激電系統返回命令識別,驗證儀器接收命令是否正常,確保井中采集系統工作模式正常和切換指令順利。完成所有識別后再對數據區進行解碼,解碼結果累加與報文尾校驗位對比,校驗失敗則在采集控制軟件界面上的儀器工作狀態監測區中顯示錯誤幀,從而確保數據傳輸過程的正確性。
3.3 周期性數據滑動疊加
時間域雙極性周期性信號可以通過數據多周期疊加和正負(雙極性)疊加消除隨機干擾。圖4是數據多周期疊加和正負(雙極性)疊加的效果圖,單周期數據因受干擾出現明顯的波形,多周期疊加數據可有效壓制隨機干擾,正負(雙極性)疊加數據對隨機干擾的壓制效果尤為明顯。
對于連續測井數據,在深度域可以采用滑動疊加技術消除隨機干擾。滑動疊加也叫移動平均法,是用一組最近時間點實際數據值來預測當前時間點數據值的一種常用方法,可有效壓制隨機干擾。滑動疊加技術適用于即期預測,能有效地消除預測中的隨機波動,是非常有用的。其基本思想是:根據周期時間序列資料,按照一定的多周期窗口逐項推移,依次計算包含一定項數周期的序時平均值(圖5)。
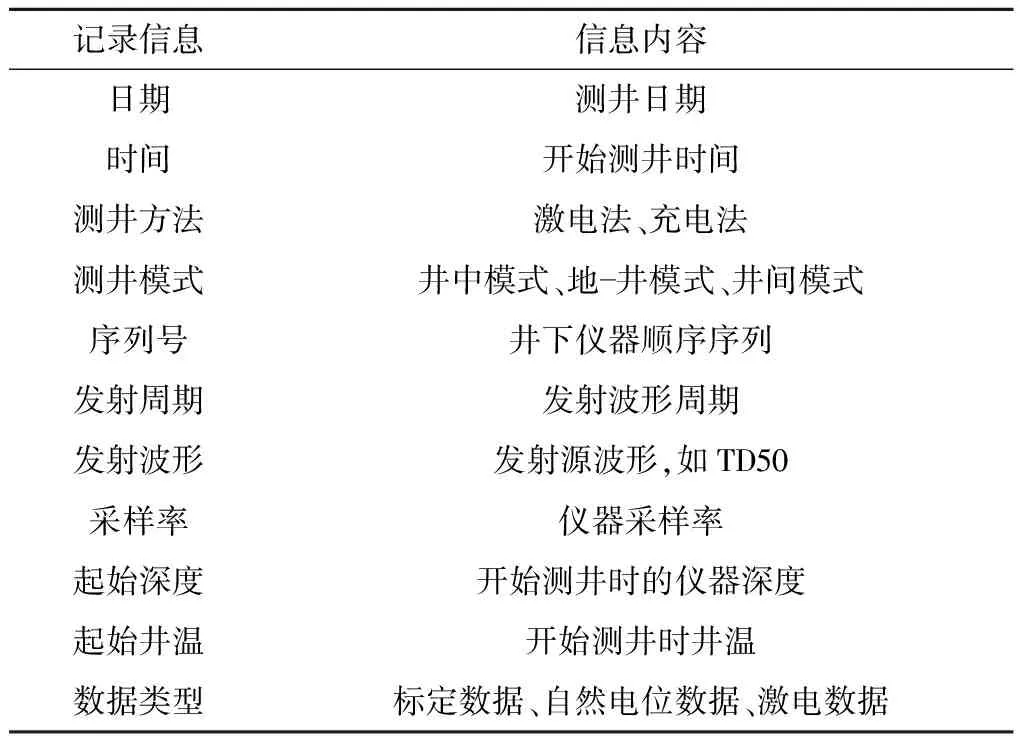
表1 Las文件頭信息

表2 Las文件數據格式
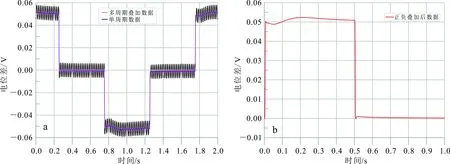
圖4 數據多周期疊加(a)和正負(雙極性)疊加(b)效果
因此,當時間序列的數值由于受周期變動和隨機波動的影響起伏較大,不易顯示出周期信號的變化趨勢時,使用滑動疊加技術可以消除這些因素的影響,顯示出信號的的變化方向與趨勢(即趨勢線),然后依趨勢線分析預測周期序列隨深度的長期趨勢。經滑動疊加數據結果如圖6所示。
3.4 激電視參數計算
時間域激電法工作原理是向地下供一定時間的穩態電流I,在t=0時刻斷電后,觀測衰減電位差ΔV2(t),如圖7所示。場電位差ΔV(極化場電位差)是一次場電位差ΔV1和二次場電位差ΔV2(tc)之和:
ΔV=ΔV2(tc)+ΔV1。
(2)
當切斷AB極供電電流后,一次場電位差立即消失,被極化的地下介質在激發極化電動勢推動下通過介質本身和周圍溶液放電。這時的二次場電位差ΔV2(t)將隨時間衰減逐漸趨于0。實踐證明,充電達到飽和的二次場電位差和斷電瞬間的二次場電位差是相等的,即
ΔV2(t)|t=0=ΔV2(tc)。
(3)
在二次場與電流成線性關系的條件下,極化率η(tc,t)為
(4)
可見,極化率是電位差瞬時值的比值,無量綱,采用百分率表示。由于ΔV2(t)和ΔV都與供電電流成正比,因此極化率與電流無關,但取決于供電時間tc和測量延遲時間t。
利用測得的一次場電位差ΔV1,可以計算出介質的電阻率:
(5)
式中,K為裝置系數。

圖7 全波形激發極化效應
在二次場、總場與電流成線性關系的條件下,也可用總場電位差ΔV計算出包括介質激發極化效應在內的等效電阻率:
(6)
充電率m的定義公式為
(7)
研究地下介質的激發極化性質還可直接利用二次場及其時間特性,當直接利用二次場電位差時,可計算參數激電率:
(8)
在頻率域測量時,測到的是視頻散率(視頻率效應):
(9)

(10)
其中,
式中,ΔVMN為M、N極間電位差。
4 應用效果
4.1 試驗區和試驗井概況
試驗區如圖8所示,位于湖北省黃石市大冶市銅綠山,即位于鄂東南地區大冶市西南1 km處的銅綠山礦田。大廣高速從礦田西部穿過,106國道及武(昌)—九(江)鐵路從礦田東部通過,區內有連接各自然村的市(縣)級水泥公路和礦山簡易公路,交通條件十分便利,有利于實驗展開。
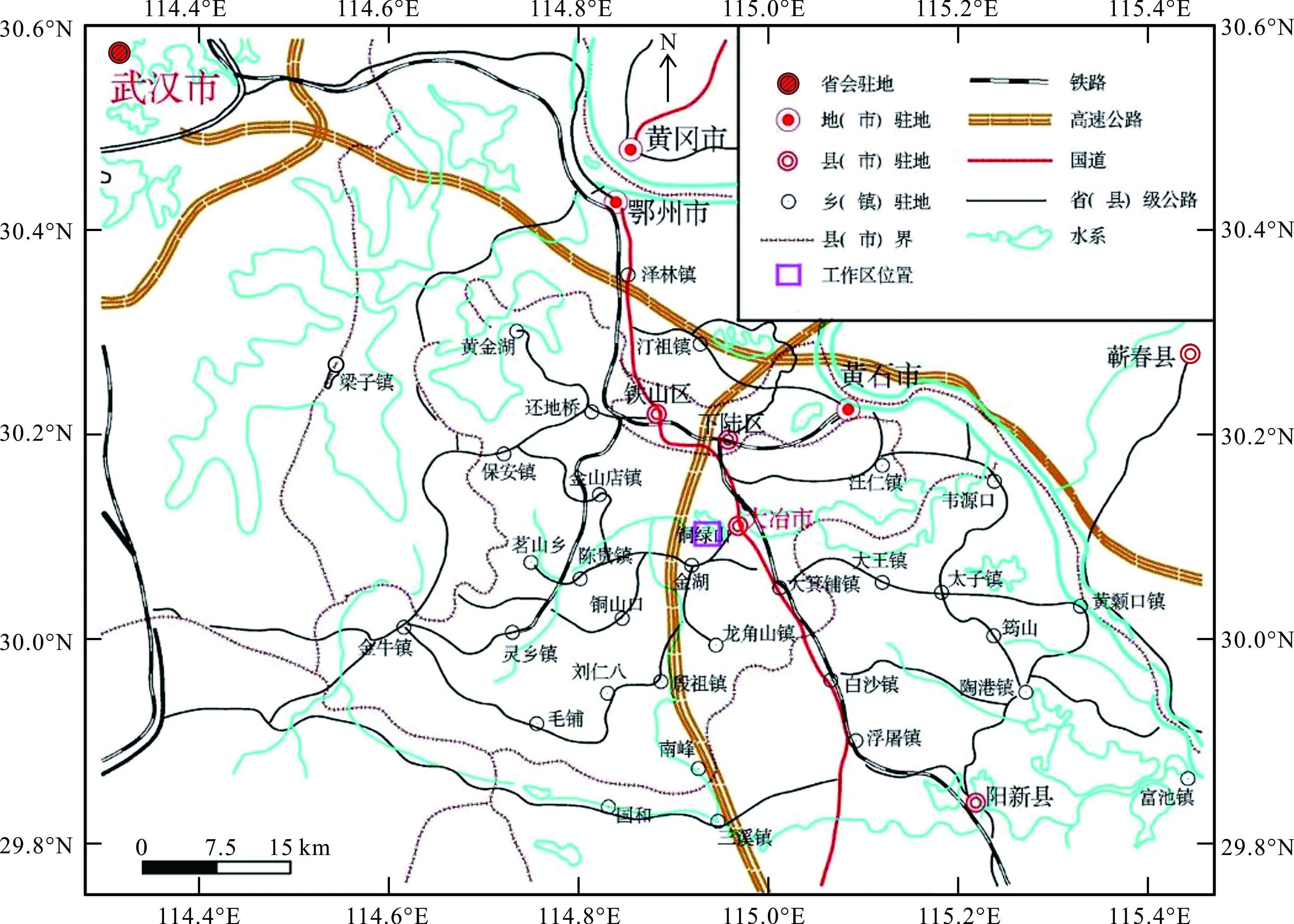
圖8 試驗區地理位置圖
鉆孔地質剖面概況如圖9所示,ZK407、ZK408井發現連續礦體,推測ZK409孔處可能存在礦體。ZK409井位于114°55′48″E,30°04′56″N,井深1 041.20 m。鉆孔巖性基本結構為:0~757.06 m為巖體,757.06~1 029.20 m為大理巖,1 029.20~1 041.20 m為巖體。在上接觸帶附近762.76~778.86 m 見銅鐵礦體1層,主要為含銅赤鐵礦磁鐵礦礦石。在下接觸帶附近1 025.90~1 029.20 m處見含銅赤鐵礦磁鐵礦石榴石矽卡巖。1 029.20~1 041.20 m巖體強矽卡巖化。
4.2 試驗概況
實驗采用地面發射井中接收即地-井模式,采集控制軟件與發射系統完成對時和同步后向地下發射空占比各為50%的正負方波信號(TD50),周期為16 s。圖10為采集過程中的全波形井中激電觀測曲線,通過實時監測數據曲線,及時調整各通道增益,有效改善信號過飽和及信號微弱情況。由于兩個采集通道采用的電極距不同,隨電極距增大會有信號放大效果,因此在數值上會有倍數差異。在實驗全過程實時觀察不同采集通道的信號一致性情況,有效確保采集數據質量。
4.3 井場實測結果
通過采集控制軟件對數據預處理,將采集得到的數據進行周期性數據滑動疊加后,取關斷后120 ms的電位差值作為二次場值進行視電阻率和視極化率的計算,得到如圖11所示的數據處理結果。可以看出,儀器對于礦層外部的較強信號和礦層中的微弱信號均能進行精度較高的采集,鉆井巖樣數據762.76~778.86 m銅鐵礦層位置視電阻率和視極化率變化明顯,數據處理結果與地質資料高度吻合,達到了預期效果。
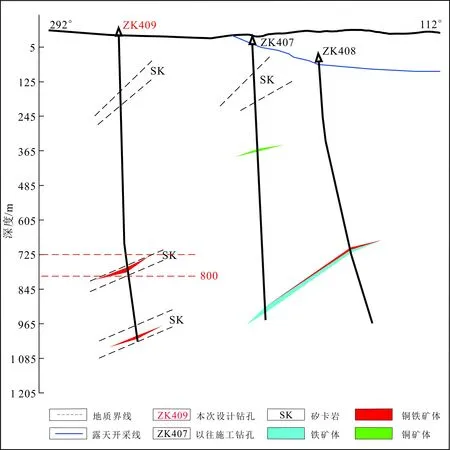
圖9 鉆孔地質剖面圖
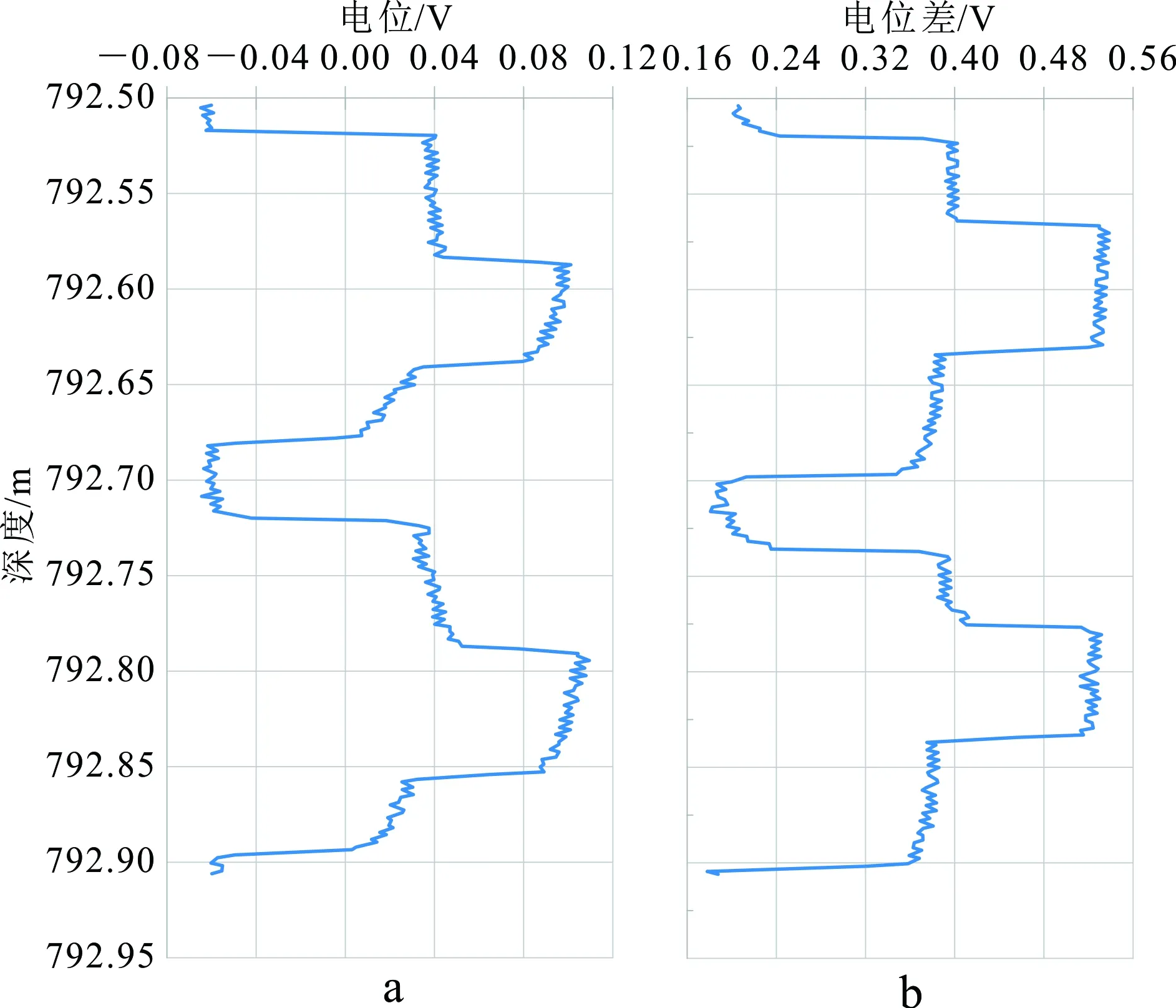
圖10 全波形井中IP電位曲線(a)和電位差曲線(b)
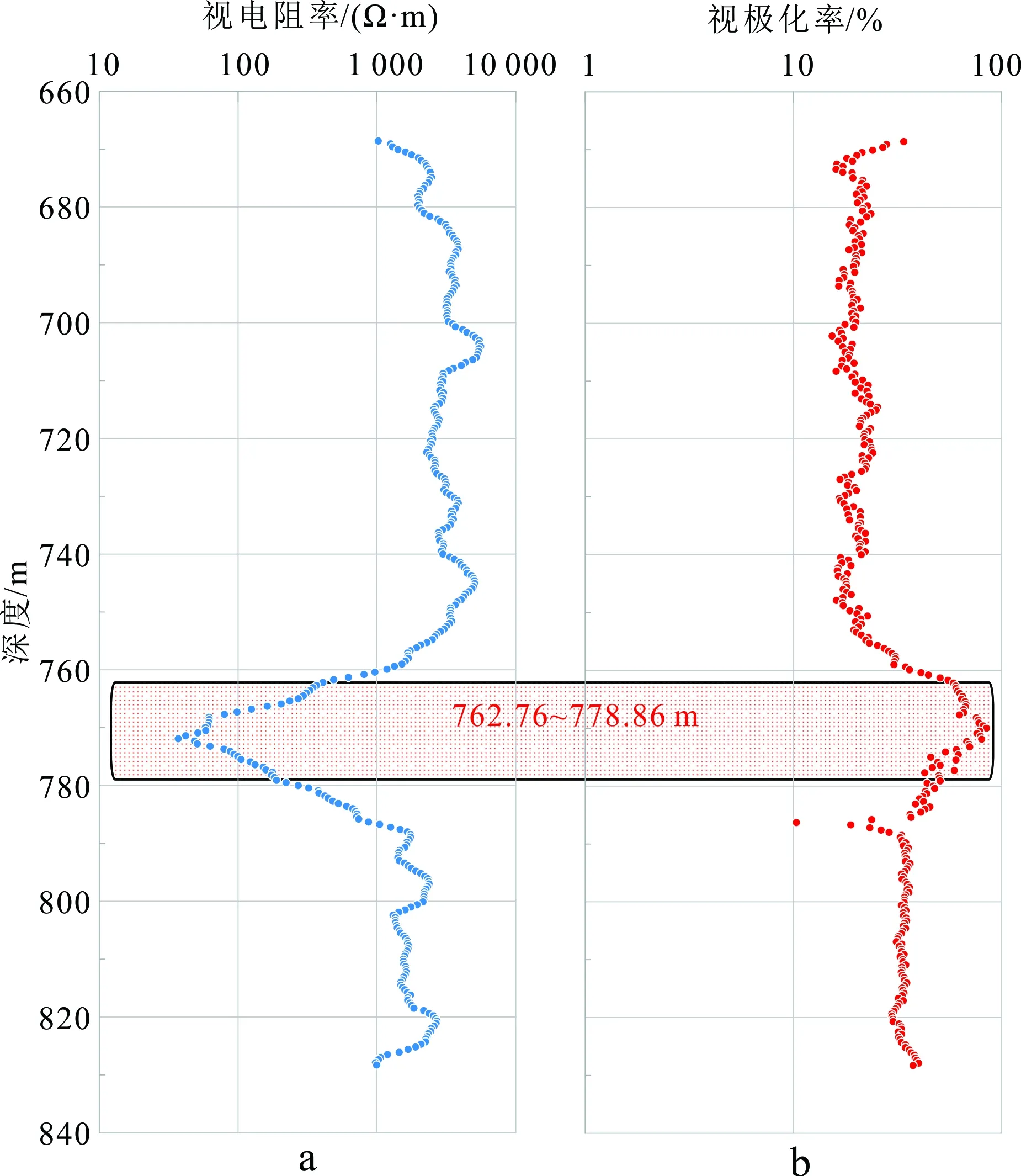
圖11 視電阻率曲線(a)和視極化率曲線(b)
5 結語
本文基于采集控制管理平臺(ACME)完成了井中激電系統采集控制軟件的開發,實現了高溫高壓條件下激電系統的數據采集、實時傳輸、顯示、監測、保存和處理成圖等功能。井中激電系統及其采集控制處理軟件成功應用于大冶市銅鐵金屬礦激發極化法測井,完成對井中激電系統的實時控制,獲取高質量的井中激電數據,通過對數據的處理和分析,得到的結果正確可信,和已知資料高度一致,達到了預期效果。
但目前采集控制軟件與井中采集系統之間的長距離通訊受地面(遙傳)通訊傳輸速率限制,抑制井中采集系統的采樣率,從而限制了儀器分辨率,采集控制軟件和井中采集系統之間的通訊效率還有提升空間,值得進一步研究。
致謝:湖北省地質局第一地質大隊和地球物理勘探大隊提供了試驗區地質資料并在試驗過程中提供了幫助,在此一并表示感謝。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32