油脂類罐體壁清刮機器人的力學仿真分析*
2022-06-24 04:05:28韓海敏
機械工程與自動化 2022年3期
韓海敏
(河南應用技術職業學院,河南 鄭州 450042)
0 引言
油罐是應用最廣的一種儲油裝置,主要儲存中央或地方儲備油[1]。由于油液黏度大、質量較輕、不易揮發,儲存這類油液一般采用大型立式圓筒形固定頂鋼板罐[2],采用Q235-B碳素鋼板焊接而成。長時間使用后油液容易粘附在油罐內壁,影響油液存儲質量的同時,還容易造成油罐內壁腐蝕受損,因此需要定期對油罐內壁進行清洗[3]。為便于油罐內壁的清洗,常采用機器人進行作業[4,5]。
經調研,為了保證機器人的穩定性,常將永磁鐵設置在行走輪足或者行走履帶上,然而很難實現磁吸附力大小與靈活移動之間的調節,難以做到輕量化設計。為此,提出了一種在油脂類儲罐作業的爬壁機器人,通過建立機器人力學模型對其進行分析,并對機器人磁吸附裝置的吸附力進行驗證。
1 爬壁機器人的總體設計
1.1 設計要求
爬壁機器人設計要求如表1所示[6]。
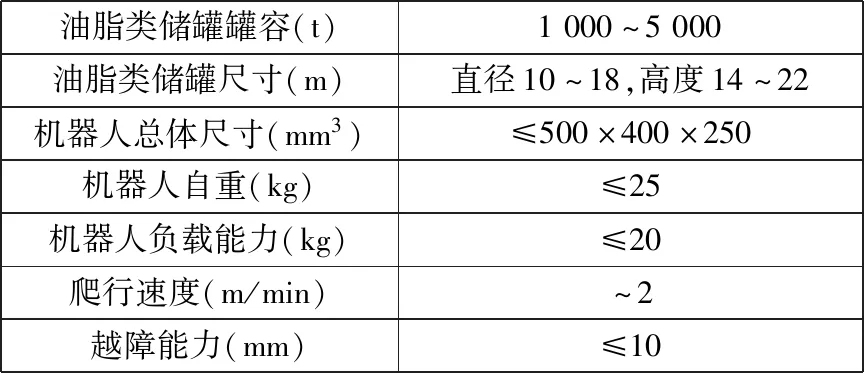
表1 爬壁機器人設計要求
1.2 總體結構設計
結合總體方案的設計要求,設計出了油脂類罐體壁爬壁機器人的整體結構,其三維模型如圖1所示。該機器人主要由行走裝置、吸附裝置、清刮裝置三部分組成。在以上裝置有機結合下,完成油脂類罐體壁的清洗任務。其中,行走裝置中,行走輪與行走電機連接,且行走輪與輔助萬向輪呈方形分布,如圖2所示。承載板表面設置有升降組件,其升降端伸入承載板下方且連接有吸附裝置,升降組件帶動吸附裝置,實現與油罐內壁之間的距離調節,從而實現吸附力大小的調節。
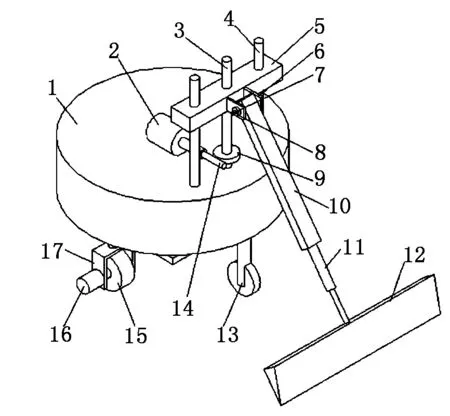
1-承載箱;2-調高電機;3-調高絲杠;4-導向柱;5-調高板;6-固定架;7-轉軸;8-鎖緊螺母;9-蝸輪;10-承載柱;11-彈性伸縮桿;12-刮板;13-輔助萬向輪;14-蝸桿;15-行走輪;16-行走電機;17-門型架
使用時,通過變磁力吸附裝置將機器人吸附在油罐內壁,通過調高組件帶動承載柱下降,使刮板與油罐內壁相接觸,利用彈性伸縮桿的彈力推動刮板,使刮板始終與油罐內壁充分接觸。該裝置整體結構簡單,大大降低了裝置的重量和成本。進行油罐內壁清潔時,行走輪的軸線與油罐的軸線平行,行走電機驅動行走輪旋轉,從而使裝置整體沿油罐內壁做圓周移動,刮板隨著裝置移動對油罐內壁進行清刮,圓周清刮完成后需要改變行走路線,承載箱內部的轉向電機帶動門型架旋轉,使行走輪的軸線與油罐的軸線相垂直,行走電機驅動行走輪旋轉,使裝置整體沿著油罐的軸向移動,移動完成后轉向電機帶動門型架恢復原狀態,重復對油罐內壁進行圓周清刮。在清掃路線的調整過程中,裝置沿油罐軸線直線運動,不會造成清掃遺漏,使用效果好。
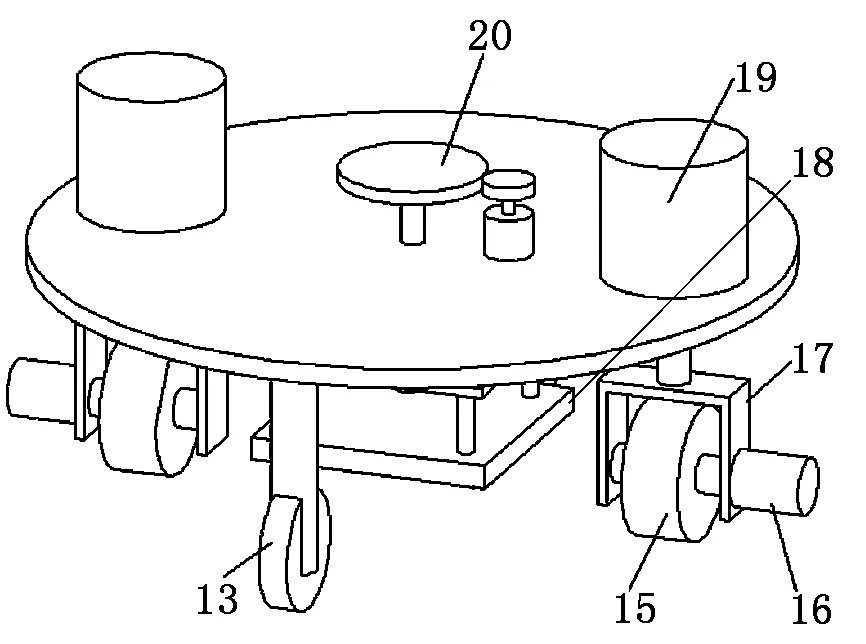
13-輔助萬向輪;15-行走輪;16-行走電機;17-門型架;18-吸附裝置;19-轉向電機;20-升降組件
2 爬壁機器人安全吸附力學分析
通過查閱資料,爬壁機器人在立式罐體壁面上工作時,主要出現了機器人沿豎直壁面下滑及傾覆脫落兩種失穩形式[7],為確定機器人的臨界吸附力,需要對以上兩種情況進行受力分析,如圖3所示。
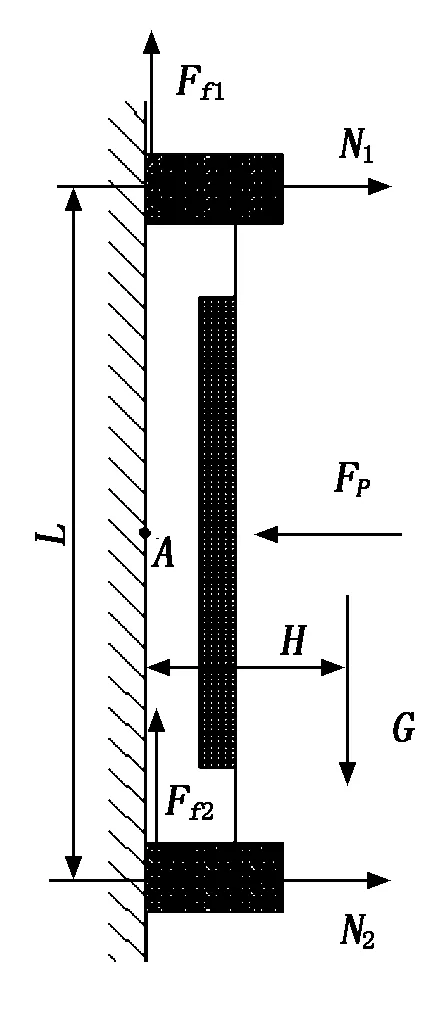
圖3 機器人沿壁面受力分析
由于所研究的油脂類罐體較大,為方便研究,將罐壁面假設為平直面[8]。機器人在壁面上運動時,安全系數K取1.7,機器人總重量(自重及載荷)G為45 kg,機器人質心到壁面之間的距離H為110 mm, 左右兩輪距離L為490 mm,罐體因使用時間較長壁面會殘留一定的油污,根據參考文獻[9],橡膠車輪與鋼板接觸的摩擦因數μ為0.5~0.8。
2.1 沿壁面下滑
爬壁機器人各輪的支持力大于0;輔助萬向輪和壁面之間為滾動摩擦,摩擦力可以忽略。為防止機器人沿壁面下滑,需要以下約束條件:
(1)
(2)
(3)
其中:Ffi為罐體壁對第i個行走輪的靜摩擦力,i=1,2;Ni為機器人第i個行走輪所受到支持力;Fp為磁吸附裝置的磁吸附力。由此得到:
Fp≥G/μ.
(4)
2.2 傾覆脫落
為防止機器人出現傾覆脫落的情況,在機器人正中央下方取點A,對點A列出力矩方程,得:
(5)
聯立式(3)、式(5)得:
Fp≥2HG/L.
(6)
2.3 機器人的安全吸附力
通過以上分析,要使機器人不會沿壁面下滑和傾覆脫落,還要考慮到安全系數。經分析比較,易發現式(6)的值小于式(4)的,故爬壁機器人所需的最小吸附力[Fp]為:
[Fp]≥K·max(G/μ).
(7)
將機器人各項參數代入式(7)中,當摩擦因數取0.5時,機器人磁吸附機構所需要的臨界吸附力最大,至少為1 530 N。
3 磁吸附裝置磁路設計及仿真分析
吸附裝置為板式磁鐵,根據結構設計要求,其安裝空間約為200 mm×200 mm,磁路結構選用的是磁能利用率較高的乙型磁路[10,11]。吸附單元之間按照一定的方式組合而成[12],所選磁塊尺寸為:27 mm×35 mm,27 mm×70 mm,54 mm×35 mm,54 mm×70 mm。永磁體充磁方向如圖4所示。
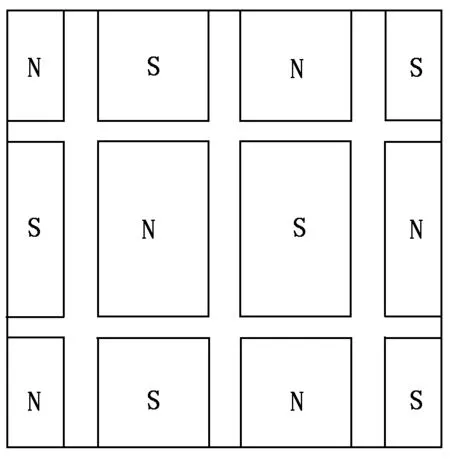
圖4 永磁體充磁方向圖
在Ansoft軟件中,建立吸附裝置的三維模型并采用自加密網格劃分,得到其有限元模型,如圖5所示。
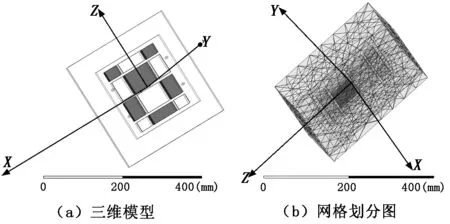
圖5 吸附裝置三維模型及網格劃分
對不同磁吸附力情況下的磁場狀況進行有效的仿真分析。圖6為仿真中工作距離設定為 7 mm和10 mm這兩種情況下的磁通密度分布比較。
使用Ansoft軟件對磁吸附裝置在不同工作距離下進行磁場仿真,得到磁吸附力與工作距離之間的關系如圖7所示。由圖6和圖7可知,隨著吸附裝置與壁面之間距離的不斷增大,磁場逐漸減弱,磁吸附力也逐漸減小。當吸附裝置離罐壁面的距離取為8 mm時,其磁場仿真的磁吸附力大小與理論計算臨界吸附力大小基本吻合,滿足正常工況的要求。

圖6 工作距離為7 mm和10 mm時的磁通密度分布圖

圖7 磁吸附力與工作距離之間的關系
4 結束語
在滿足結構安全可靠、輕量化及成本低的原則下,設計出了爬壁機器人的整體機械結構。建立了機器人不沿壁面下滑及傾覆脫落兩種情況下的力學模型,得到了爬壁機器人在壁面運行時的安全吸附力。對磁吸附裝置的磁路進行設計,并利用Ansoft有限元軟件對磁吸附裝置三維模型進行仿真,比較了不同壁面距離下磁通密度的分布情況,得出了吸附力與工作距離之間的關系,結果表明仿真結果與理論計算臨界吸附力大小基本吻合,滿足正常工況的要求。