某直升機(jī)空中低頻篩動(dòng)故障分析
2022-06-28 03:43:30連林櫻張嚴(yán)林
新技術(shù)新工藝 2022年5期
關(guān)鍵詞:發(fā)動(dòng)機(jī)振動(dòng)
鄭 坤,連林櫻,薛 晨,張嚴(yán)林
(昌河飛機(jī)工業(yè)集團(tuán)有限責(zé)任公司,江西 景德鎮(zhèn) 333000)
直升機(jī)振動(dòng)的主要原因是由工作原理、設(shè)計(jì)技術(shù)和制造工藝共同決定的。直升機(jī)傳動(dòng)部件將發(fā)動(dòng)機(jī)的高速旋轉(zhuǎn)動(dòng)能減速傳遞給主旋翼、尾旋翼和其他需要旋轉(zhuǎn)動(dòng)能的部件,機(jī)械的轉(zhuǎn)動(dòng)載荷與動(dòng)不平衡也就產(chǎn)生了相應(yīng)幅度的振動(dòng),因此除了發(fā)動(dòng)機(jī)外,旋翼、尾槳和傳動(dòng)部件也是直升機(jī)主要的振動(dòng)載荷源。時(shí)至今日,直升機(jī)的振動(dòng)水平仍是衡量直升機(jī)先進(jìn)程度的最主要指標(biāo)之一。
振動(dòng)對(duì)機(jī)體結(jié)構(gòu)和部件產(chǎn)生應(yīng)力,縮短使用壽命,影響直升機(jī)駕駛和乘坐的舒適程度;過(guò)大的振動(dòng)不僅使乘員感覺難受,飛行操縱困難,而且加速形成對(duì)直升機(jī)旋轉(zhuǎn)部件的損傷及結(jié)構(gòu)件的磨損、疲勞直至斷裂,影響飛行安全。
本文以某直升機(jī)在飛行過(guò)程中低頻篩動(dòng)故障為例,對(duì)振動(dòng)數(shù)據(jù)和扭振機(jī)理進(jìn)行研究和分析,為后續(xù)處理類似問(wèn)題積累經(jīng)驗(yàn)[1-2]。
1 故障現(xiàn)象
直升機(jī)(速度120~160 km/h、高度350 m以上)平飛或轉(zhuǎn)彎過(guò)程中出現(xiàn)空中低頻的側(cè)向晃動(dòng)現(xiàn)象,體感類似“坐船”,前艙飛行員體感更為顯著,擋風(fēng)玻璃、操縱臺(tái)等均無(wú)異常抖動(dòng)情況。飛行員操作駕駛桿改變當(dāng)前飛行狀態(tài),直升機(jī)篩動(dòng)現(xiàn)象立刻消除,保持類似當(dāng)前狀態(tài)則故障復(fù)現(xiàn)。
2 原因排查
2.1 故障發(fā)生原因
針對(duì)該架機(jī)出現(xiàn)的空中篩動(dòng)問(wèn)題,組織了多次排故,現(xiàn)對(duì)排故過(guò)程進(jìn)行重新梳理,并對(duì)可能引起直升機(jī)機(jī)體側(cè)向低頻晃動(dòng)的原因進(jìn)行分析,主要有性能不佳、系統(tǒng)故障、固有特性這3類,具體排故情況如圖1所示。
1)性能不佳:主、尾槳振動(dòng)錐體不佳,主要排故歷程見表1,完成相關(guān)工作后基本排除誘因的可能性。
2)系統(tǒng)故障:飛控、操縱等系統(tǒng)故障,主要排故歷程見表2,完成相關(guān)工作后基本排除誘因的可能性。
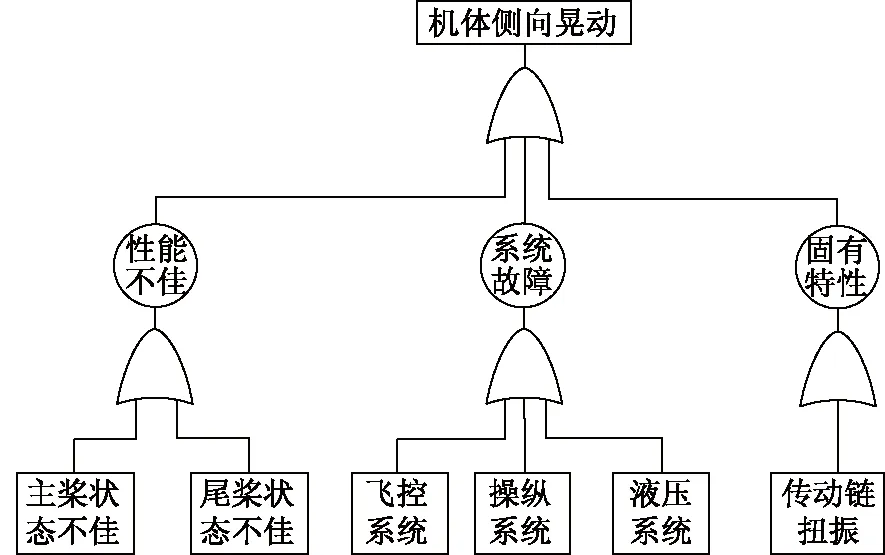
圖1 機(jī)體低頻晃動(dòng)主要原因
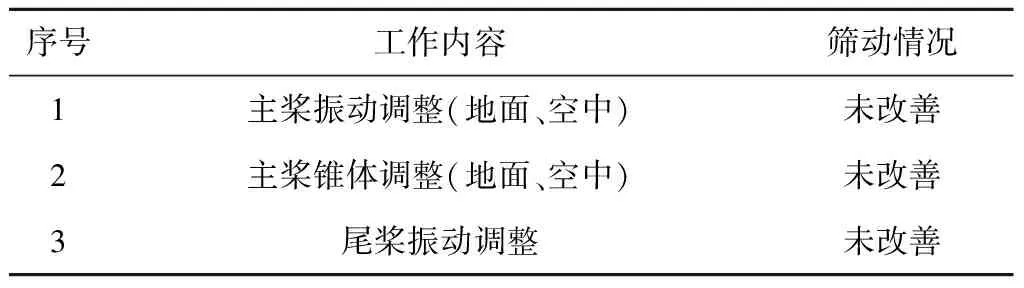
表1 性能不佳排故歷程
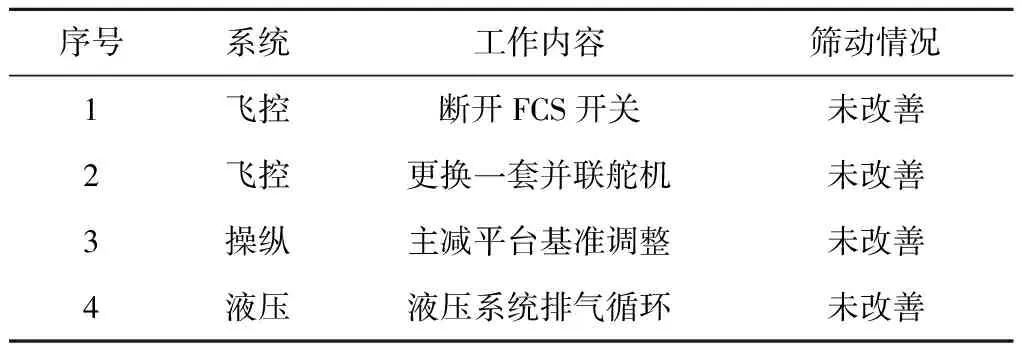
表2 系統(tǒng)故障排故歷程
3)固有特性。直升機(jī)的動(dòng)力原理簡(jiǎn)化模型如圖2所示。發(fā)動(dòng)機(jī)動(dòng)力輸出軸通過(guò)主減速器經(jīng)過(guò)傳動(dòng)軸驅(qū)動(dòng)主/尾旋翼。旋翼/傳動(dòng)系統(tǒng)相當(dāng)于一個(gè)柔性軸系,受到扭矩的作用會(huì)產(chǎn)生一定的固有扭轉(zhuǎn)振動(dòng),具有一定的固有頻率。如果發(fā)動(dòng)機(jī)動(dòng)力輸出軸對(duì)旋翼/傳動(dòng)系統(tǒng)所施加的扭矩?fù)接写斯逃蓄l率的波動(dòng),傳動(dòng)鏈的固有頻率被激勵(lì)出來(lái),導(dǎo)致直升機(jī)篩動(dòng)[3-5]。
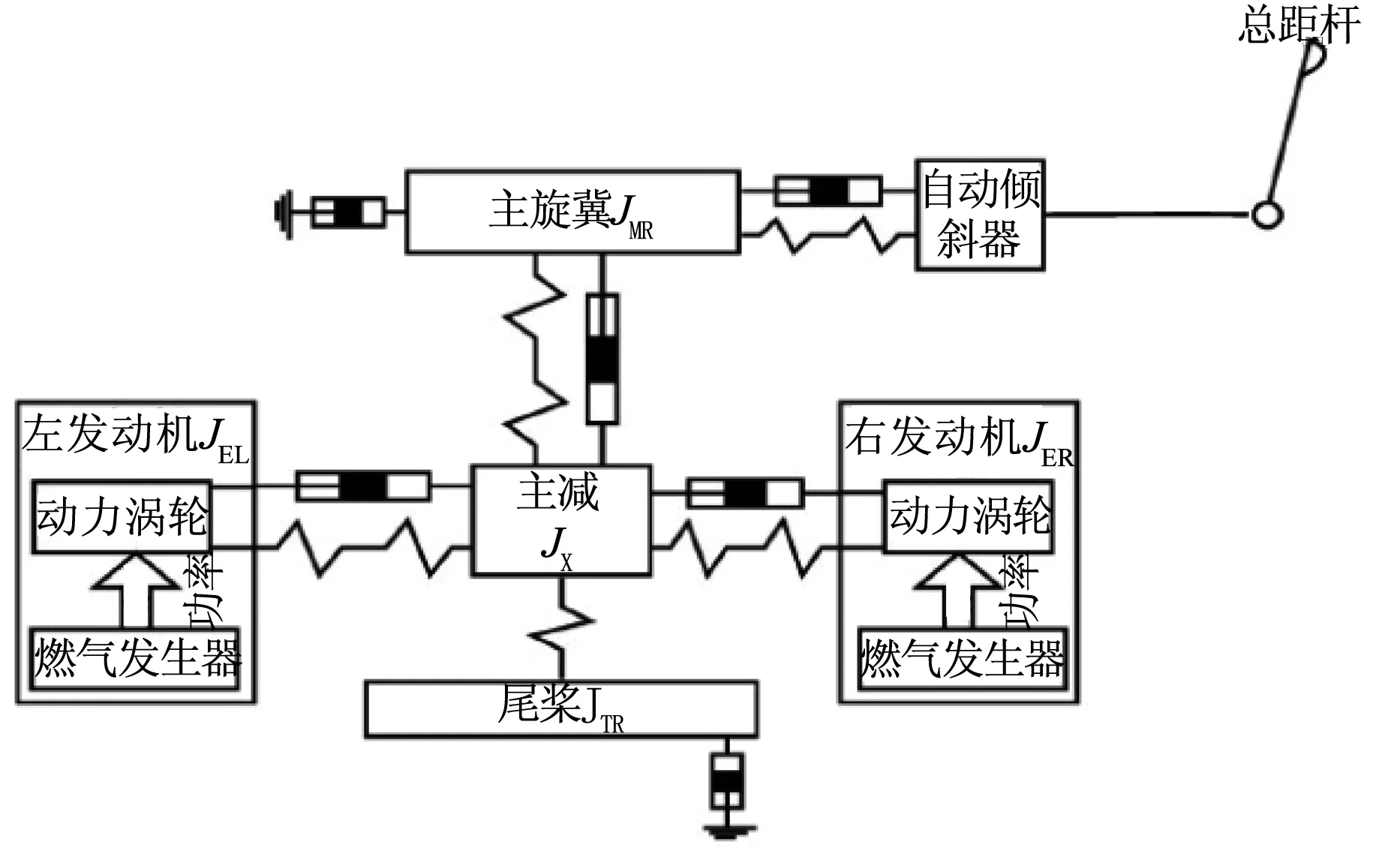
圖2 直升機(jī)的動(dòng)力原理簡(jiǎn)化模型
飛行振動(dòng)數(shù)據(jù)分析結(jié)果表明,當(dāng)機(jī)體出現(xiàn)篩動(dòng)時(shí),存在2.7 Hz側(cè)向低頻振動(dòng),同時(shí)發(fā)動(dòng)機(jī)參數(shù)顯示雙發(fā)扭矩存在同頻的扭矩波動(dòng),橫向周期變距桿位移也出現(xiàn)明顯周期波動(dòng)。傳動(dòng)鏈扭振表現(xiàn)為旋翼系統(tǒng)的擺振晃動(dòng)導(dǎo)致機(jī)體發(fā)生偏航,人體感受主要為側(cè)向晃動(dòng),與飛行員描述吻合。
綜合上述原因分析和原因排查,初步認(rèn)為該架機(jī)空中側(cè)向低頻晃動(dòng)的原因是傳動(dòng)鏈2.7 Hz扭振引起的。下述進(jìn)行飛行數(shù)據(jù)分析。
2.2 飛行數(shù)據(jù)分析
該型機(jī)傳動(dòng)鏈系統(tǒng)的固有頻率在2.7 Hz附近(見圖3),如系統(tǒng)受到擾動(dòng),有可能激勵(lì)出傳動(dòng)鏈扭振。
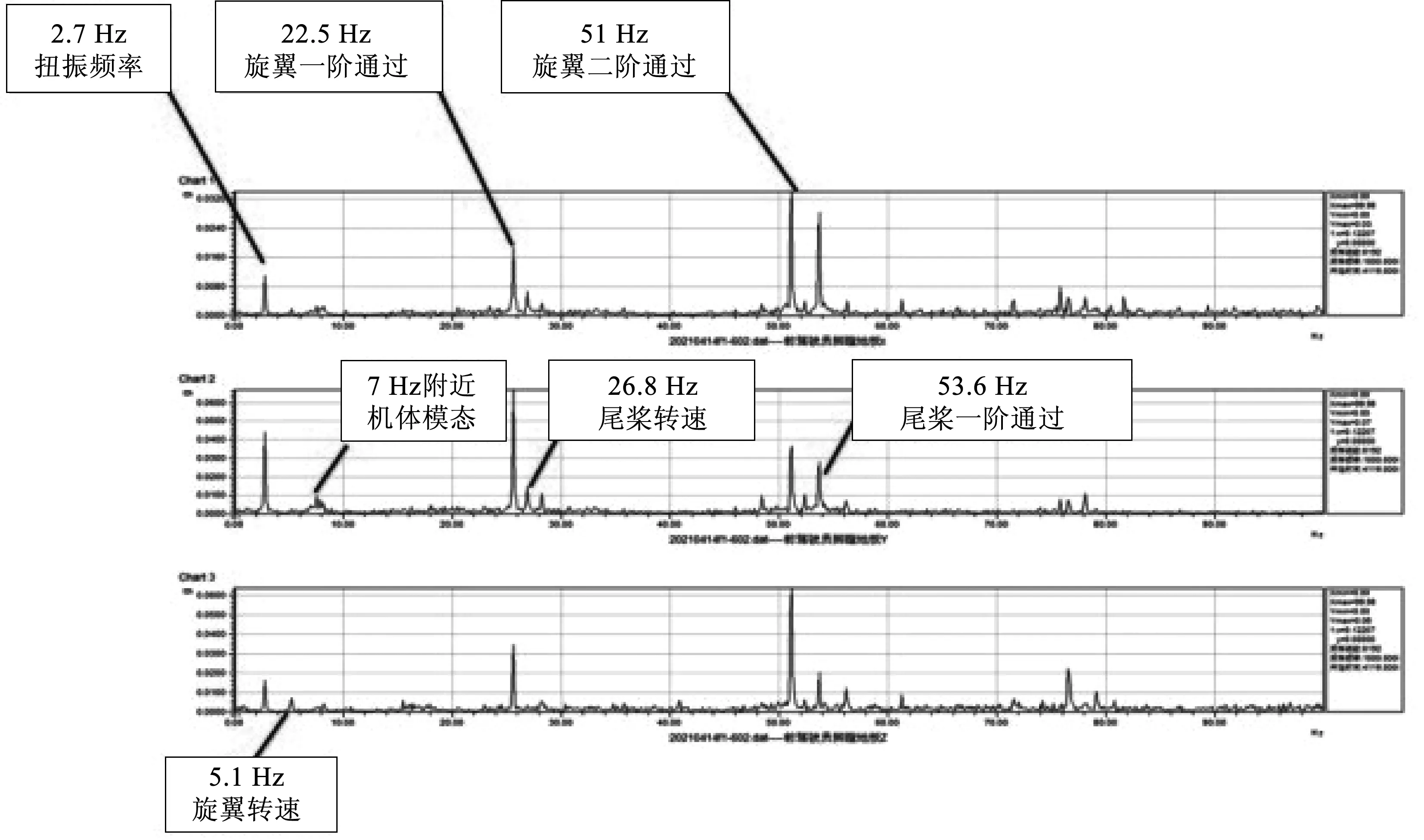
圖3 某型機(jī)典型頻譜圖
分析直升機(jī)篩動(dòng)時(shí)的FFT飛行振動(dòng)數(shù)據(jù)可以得出,在2.7 Hz振動(dòng)頻率時(shí),前艙腳蹬地板、中減、尾減側(cè)向Y值的振幅明顯,前艙腳蹬地板側(cè)向Y值幅值約為0.049g,中減側(cè)向Y值幅值約為0.082g,尾減側(cè)向Y值幅值約為0.123g(見圖4)。

a) 前艙腳蹬地板側(cè)向Y值
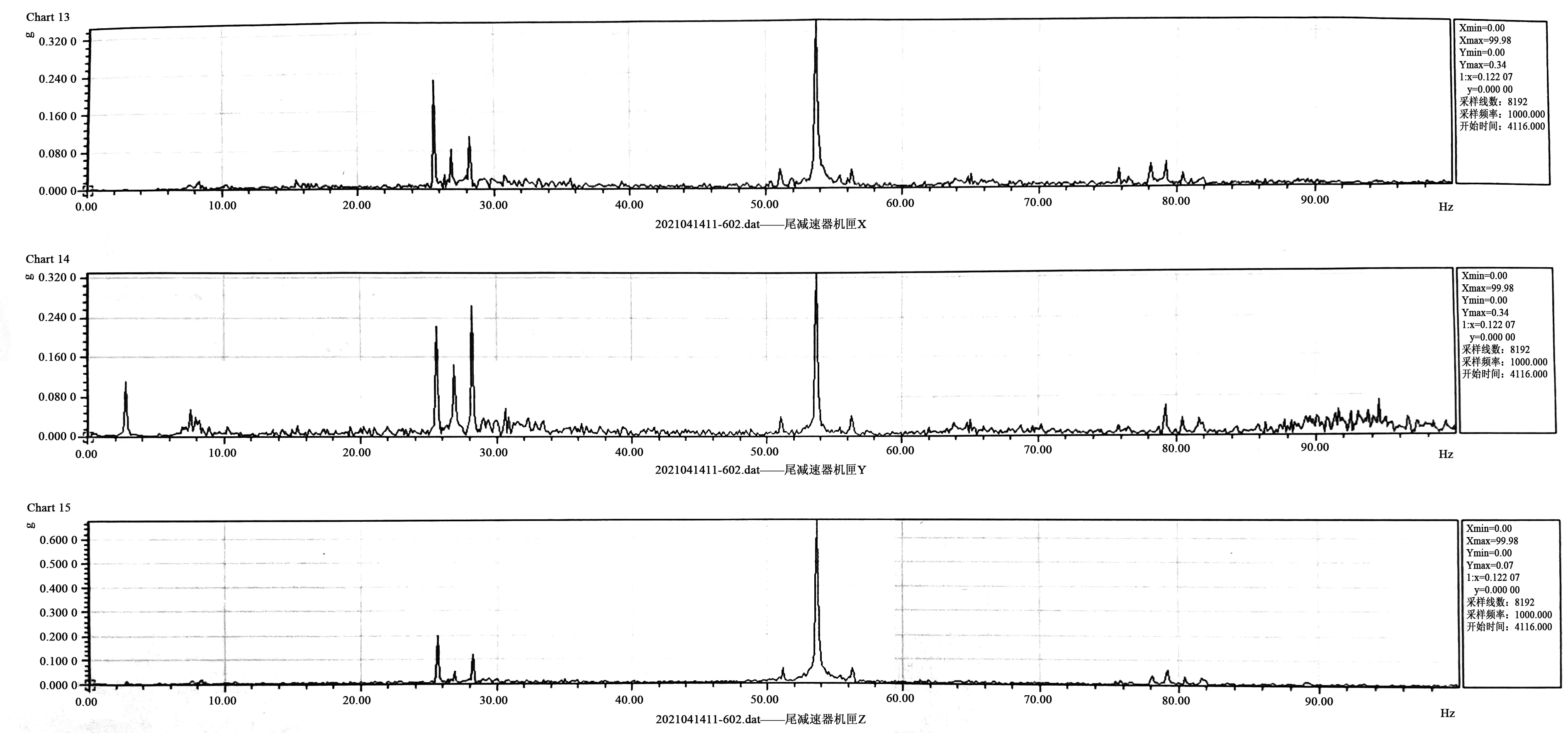
c) 尾減側(cè)向Y值
對(duì)比該型機(jī)其他直升機(jī)在2.7 Hz振動(dòng)頻率的連續(xù)譜飛行振動(dòng)數(shù)據(jù)可以得出,該架機(jī)前艙Y值振幅已遠(yuǎn)超該型機(jī)平均值0.01g左右,且別架機(jī)出現(xiàn)峰值的維持時(shí)間非常短(見圖5)。

a) 前艙腳蹬地板側(cè)向Y值

b) 中減側(cè)向Y值

c) 尾減側(cè)向Y值
綜合上述飛行振動(dòng)數(shù)據(jù)基本認(rèn)為,該架機(jī)空中側(cè)向低頻晃動(dòng)的原因是傳動(dòng)鏈2.7 Hz扭振引起的。下述按對(duì)傳動(dòng)鏈扭振類故障進(jìn)行問(wèn)題處理。
2.3 傳動(dòng)鏈扭振
產(chǎn)生扭轉(zhuǎn)振動(dòng)的根本原因是旋轉(zhuǎn)機(jī)械的主動(dòng)力矩與負(fù)荷反力矩之間失去平衡,致使合成扭矩的方向來(lái)回變化,而該型機(jī)雙發(fā)動(dòng)力輸出軸轉(zhuǎn)動(dòng)方向相反,在受到擾動(dòng)時(shí),必然導(dǎo)致扭振的發(fā)生[6]。
直升機(jī)傳動(dòng)鏈主要由發(fā)動(dòng)機(jī)、旋翼、尾槳、傳動(dòng)系統(tǒng)組成,因此直升機(jī)傳動(dòng)鏈扭振主要與發(fā)動(dòng)機(jī)、旋翼、尾槳、傳動(dòng)系統(tǒng)等系統(tǒng)狀態(tài)有關(guān)(見圖6),具體排故情況如下[7]。
1)PAO現(xiàn)象。
PAO現(xiàn)象又稱為飛行員輔助振蕩,在機(jī)體振動(dòng)時(shí)飛行員將隨著機(jī)體振動(dòng),即直升機(jī)振動(dòng)時(shí)飛行員握桿較緊時(shí),通過(guò)飛行員手臂的牽連運(yùn)動(dòng)導(dǎo)致飛行操縱中引入與飛行員振動(dòng)同頻的波動(dòng),經(jīng)飛控系統(tǒng)耦合作用后,就會(huì)進(jìn)一步加劇機(jī)體的振動(dòng)。
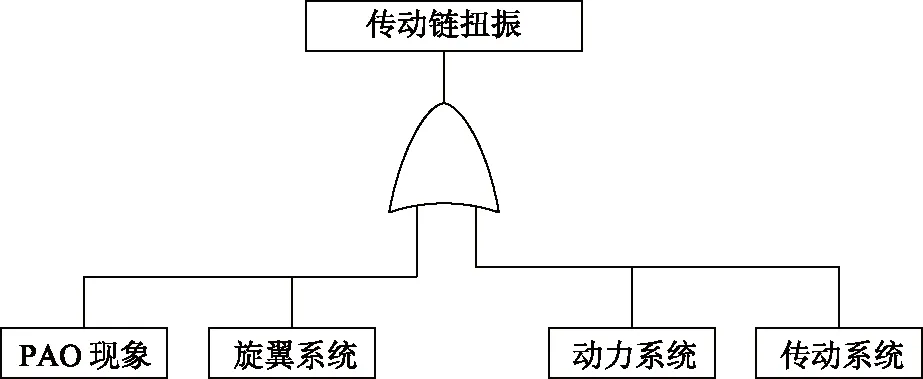
圖6 傳動(dòng)鏈扭振的主要原因
經(jīng)與飛行員溝通,飛行員在出現(xiàn)扭振時(shí)動(dòng)作輕柔,做到總距穩(wěn)定并輕微握桿,避免出現(xiàn)PAO現(xiàn)象,基本排除PAO現(xiàn)象的可能性。
2)旋翼系統(tǒng)。
按表3進(jìn)行故障處理并開展試飛驗(yàn)證工作,篩動(dòng)現(xiàn)象均未改善。
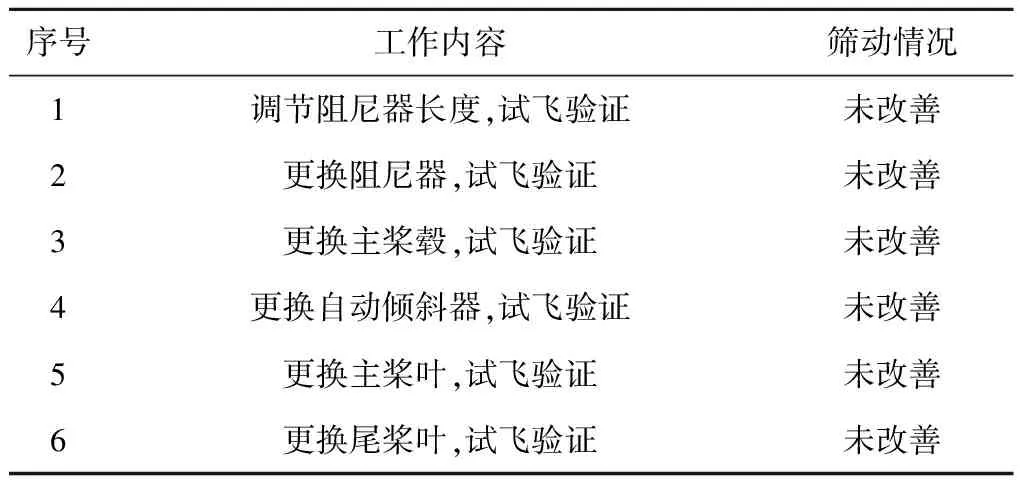
表3 旋翼系統(tǒng)排故歷程
3)動(dòng)力系統(tǒng)。
開展更換發(fā)動(dòng)機(jī)(左右)的對(duì)比試飛,飛行員表示換發(fā)后有體感輕微改善。完成飛行試驗(yàn)后進(jìn)行振動(dòng)數(shù)據(jù)對(duì)比,換發(fā)后振動(dòng)值明顯下降(前艙側(cè)向由0.05g降低至0.02g)。開展配平方式切換(溫度配平/扭矩配平)的對(duì)比試飛,飛行員表示溫度配平試飛有體感較大改善,完成飛行試驗(yàn)后進(jìn)行振動(dòng)數(shù)據(jù)對(duì)比,溫度配平試飛的振動(dòng)值明顯下降(前艙側(cè)向由0.05g降低至0.01g)。振動(dòng)數(shù)據(jù)對(duì)比見表4。

表4 振動(dòng)數(shù)據(jù)對(duì)比
從振動(dòng)數(shù)據(jù)以及機(jī)組反饋情況表明,該架機(jī)由發(fā)動(dòng)機(jī)輸出的扭矩波動(dòng)是扭振的驅(qū)動(dòng)力,導(dǎo)致傳動(dòng)鏈系統(tǒng)出現(xiàn)較大的扭振響應(yīng),引起側(cè)向低頻篩動(dòng),因此可以認(rèn)為改變扭振激勵(lì)源是解決扭振問(wèn)題的一種辦法。
然而,飛行員反饋換發(fā)前后篩動(dòng)體感略微改善,未達(dá)到可接受范圍,而溫度配平試飛可接受,但在使用上仍需解決扭矩配平試飛問(wèn)題。
4)傳動(dòng)系統(tǒng)。
對(duì)傳動(dòng)系統(tǒng)進(jìn)行基本的安裝固定性檢查,同時(shí)重新安裝主減速器,重新安裝尾傳動(dòng)軸并更換主減輸出法蘭,完成相應(yīng)調(diào)整和檢查工作后開展試飛驗(yàn)證,連續(xù)2個(gè)飛行員反饋未發(fā)生篩動(dòng)現(xiàn)象,第3個(gè)飛行日故障復(fù)現(xiàn),做數(shù)據(jù)對(duì)比可以得出飛行員反饋的篩動(dòng)現(xiàn)象出現(xiàn)時(shí)間與振動(dòng)數(shù)據(jù)基本吻合(見表5)。
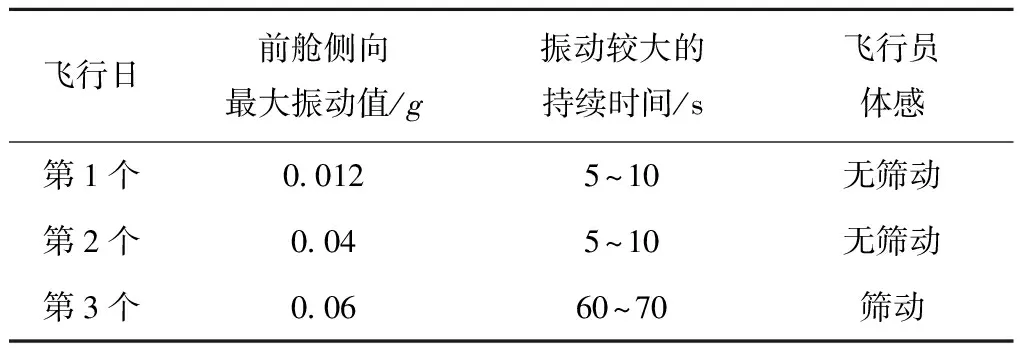
表5 篩動(dòng)前后振動(dòng)數(shù)據(jù)
綜合上述問(wèn)題處理的過(guò)程可以基本確定是直升機(jī)扭振導(dǎo)致的側(cè)向低頻篩動(dòng),目前暫未確定故障點(diǎn)。
3 故障機(jī)理分析
從動(dòng)力學(xué)角度,旋翼系統(tǒng)、傳動(dòng)系統(tǒng)和動(dòng)力系統(tǒng)等旋轉(zhuǎn)部件構(gòu)成一個(gè)耦合扭轉(zhuǎn)動(dòng)力學(xué)系統(tǒng),發(fā)動(dòng)機(jī)是動(dòng)力傳動(dòng)鏈的重要組成部分,因此動(dòng)力傳動(dòng)鏈扭振系統(tǒng)是發(fā)動(dòng)機(jī)的電調(diào)控制系統(tǒng)耦合在一起的(見圖7)。
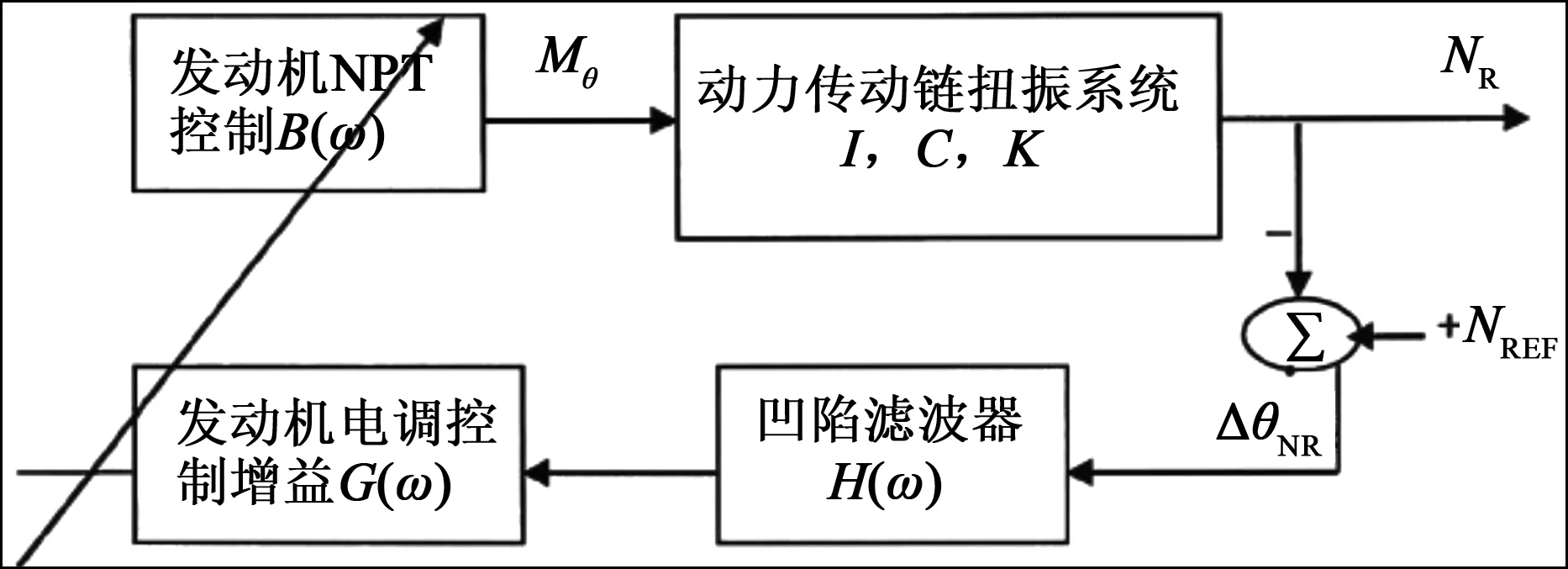
圖7 扭轉(zhuǎn)振動(dòng)與發(fā)動(dòng)機(jī)電調(diào)控制系統(tǒng)耦合圖
當(dāng)直升機(jī)雙發(fā)轉(zhuǎn)速不一致時(shí),由于雙發(fā)動(dòng)力輸出軸轉(zhuǎn)動(dòng)方向相反,故輸出扭矩在同一直線上失去平衡,會(huì)導(dǎo)致直升機(jī)出現(xiàn)扭振現(xiàn)象;另外一方面機(jī)械傳動(dòng)鏈系統(tǒng)在受到外界干擾下,發(fā)動(dòng)機(jī)轉(zhuǎn)速發(fā)生變化,而發(fā)動(dòng)機(jī)控制是以保持發(fā)動(dòng)機(jī)轉(zhuǎn)速恒定為目標(biāo),當(dāng)發(fā)動(dòng)機(jī)轉(zhuǎn)速發(fā)生變化時(shí)(脈動(dòng)或波動(dòng)),轉(zhuǎn)速傳感器感受到轉(zhuǎn)速變化,并通過(guò)電調(diào)/燃調(diào)進(jìn)行調(diào)整修正,通過(guò)改變?nèi)加土縼?lái)修正轉(zhuǎn)速,因此當(dāng)發(fā)動(dòng)機(jī)轉(zhuǎn)速有脈動(dòng)時(shí),燃油量也會(huì)有脈動(dòng)變化,這樣導(dǎo)致發(fā)動(dòng)機(jī)輸出扭矩出現(xiàn)脈動(dòng)變化。這就相當(dāng)于對(duì)傳動(dòng)鏈?zhǔn)┘恿思?lì),從而出現(xiàn)傳動(dòng)鏈扭振現(xiàn)象。雖然在這一回路中串入了凹陷濾波器降低振動(dòng)的幅值,避免了扭振系統(tǒng)耦合振動(dòng)的發(fā)散,但不能完全消除,而剩余的振幅又無(wú)法被系統(tǒng)阻尼(如旋翼阻尼器阻尼、氣動(dòng)阻尼等)很快消耗,就會(huì)導(dǎo)致機(jī)體出現(xiàn)長(zhǎng)時(shí)間的晃動(dòng)[8]。
4 后續(xù)工作
旋翼-傳動(dòng)-發(fā)動(dòng)機(jī)組成的扭振系統(tǒng)在受到擾動(dòng)發(fā)生振蕩時(shí)會(huì)成為人體感受到側(cè)向低頻篩動(dòng)的源頭,離旋翼中心越遠(yuǎn)感受越顯著。結(jié)合機(jī)理分析認(rèn)為,后續(xù)工作主要在如下3個(gè)方面開展。
1)旋翼阻尼的影響。旋翼阻尼主要分為氣動(dòng)阻尼和旋翼阻尼器的阻尼,增大阻尼性能可以耗散旋翼系統(tǒng)擺振能量,降低該頻點(diǎn)的振動(dòng)值,所以認(rèn)為通過(guò)優(yōu)選主旋翼阻尼器和調(diào)整主旋翼動(dòng)平衡來(lái)增大阻尼性能是排故方向之一。
2)發(fā)動(dòng)機(jī)的影響。發(fā)動(dòng)機(jī)的扭矩輸出是扭振的激勵(lì)源,發(fā)動(dòng)機(jī)電調(diào)內(nèi)的凹陷濾波器在2.7 Hz下能降低振動(dòng)的幅值,上述飛行試驗(yàn)已經(jīng)證明改變激勵(lì)源能有效改善直升機(jī)振動(dòng),所以認(rèn)為通過(guò)優(yōu)選發(fā)動(dòng)機(jī)改善激勵(lì)源是排故方向之一。
3)傳動(dòng)系統(tǒng)的影響。傳動(dòng)系統(tǒng)存在膜片聯(lián)軸節(jié)、主減底部金屬?gòu)椥园寮案鬏S的連接和同軸度等影響因素,如存在變化,會(huì)導(dǎo)致存在異常的沖擊脈動(dòng)激勵(lì),引發(fā)系統(tǒng)不穩(wěn)定,上述飛行試驗(yàn)已經(jīng)證明,改變傳動(dòng)系統(tǒng)的安裝固定性可以改善扭振現(xiàn)象,所以認(rèn)為通過(guò)優(yōu)選傳動(dòng)系統(tǒng)中重要部件改善傳動(dòng)鏈連接性是排故方向之一。
5 結(jié)語(yǔ)
本文涉及的傳動(dòng)鏈扭振是直升機(jī)常見振動(dòng)問(wèn)題的一類,實(shí)際上直升機(jī)在試飛過(guò)程中還存在尾振、“拍頻”振動(dòng)、共振等多種振動(dòng)問(wèn)題,在不同頻率下均存在振動(dòng)超限的隱患,因此開展常態(tài)化振動(dòng)監(jiān)測(cè)和專業(yè)化數(shù)據(jù)分析已經(jīng)勢(shì)在必行。
通過(guò)持續(xù)采集整機(jī)不同部位振動(dòng)的頻譜,將振動(dòng)測(cè)試采集系統(tǒng)的數(shù)據(jù)與飛行參數(shù)記錄系統(tǒng)的數(shù)據(jù)融合,發(fā)現(xiàn)直升機(jī)基本系統(tǒng)狀態(tài)的變化,及時(shí)采取必要的維修處理,有助于提升直升機(jī)的可靠性和使用壽命[9-11]。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:30
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:18
瘋狂英語(yǔ)·新讀寫(2020年3期)2020-06-06 09:05:56
中國(guó)公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
汽車與新動(dòng)力(2015年1期)2015-02-27 12:11:01
計(jì)算物理(2014年2期)2014-03-11 17:01:44
汽車與新動(dòng)力(2014年2期)2014-02-27 12:10:15