基于Hilbert-Huang變換和殘差神經網絡的軸承故障診斷
2022-06-28 17:46:10朵慕社紀國宜
制造業自動化 2022年6期
朵慕社,紀國宜
(南京航空航天大學 機械結構力學及控制國家重點實驗室,南京 210016)
0 引言
軸承在現代機械設備中有著至關重要的作用,研究新的高精度的故障診斷方法,對降低機械設備維護成本,減少事故的發生具有重要意義 。傳統的故障診斷方法已取得較好的診斷結果,但仍存在以下三個問題:1)診斷結果依賴于人為提取的特征向量,針對不同工況下的設備提取不同特征的指標,這依賴于專業人員的先驗知識。2)已有模型學習深度太淺,不能學習信號的深層特征,這對復雜工況下的機械設備往往效果不佳,。因此,有必要尋找一種具有深層次,能適應非平穩狀態下的自適應診斷方法。
針對軸承故障診斷問題,眾多學者提出了各種診斷方法,近年來,人工智能快速發展,很多學者投身到神經網絡中,尋求軸承的智能診斷方法。Li等[4]提出了一種多模式深度支持向量分類方法,該方法采用基于分離融合的深度學習來執行齒輪箱的故障診斷任務。Liang等[5]提出了一種WT-GAN-CNN診斷模型,利用生成對抗網絡(Generative adversarial networks,GAN)生成多個故障樣本,克服了實際工業生產中正常樣本易取得而故障樣本少的缺點。Gan等[6]提出了一種新的分層深度信念網絡診斷方法,通過逐層收集深度信念網絡(Deep belief network,DBN)來對機械系統進行層次識別,前一層神經網絡用來判斷故障類型,后一層估計故障損壞程度,達到既能判斷故障類型,又能估計損壞程度的目的。高峰]對原始振動數據進行分段預處理,利用卷積神經網絡的故障診斷模型實現對故障特征的自適應提取,利用Softmax分類器實現了對故障診斷結果的輸出。
HHT由EMD分解和Hilbert變換兩部分組成,是一種有效的時頻分析方法]。提出用HHT和深度殘差神經網絡的方法對軸承進行故障診斷,首先將時域信號進行EMD分解,對分解后的IMF進行Hilbert變換,得到原始信號的時頻分布圖,輸入到具有50層深度的殘差神經網絡中模型中訓練,測試集用于測試模型準確率。為提高模型收斂速度,采用深度學習Pytorch框架的GPU計算,實現模型的快速自適應訓練。
1 理論背景
1.1 EMD分解
EMD是由Huang等在1998年提出的一種自適應時頻分析方法,將任意信號分解為若干各IMF和殘差信號的和:

每一個IMF滿足兩個條件:1)在整個時間范圍內,函數極值點的數量必須與零點數量相同,或最多相差不超過一個;2)在任意一點上,信號局部極大值的包絡線與局部極小值的包絡線的均值為零]。
EMD分解的步驟如下:
1)假設信號為x(t),其上下包絡局部均值組成的序列為m1(t),則:

對于一般的非平穩信號,一般需進行多次分解,重復上述操作k次,直到Hk(t)滿足IMF的兩個條件,得到第一個IMF,記為c1(t);
2)計算剩余信號:

3)將r1(t)作為新的信號,重復式(2)~式(3),直至殘差信號足夠小,完成分解。
1.2 Hilbert變換
Hilbert變換時在EMD分解的基礎上,對分解出的各個IMF分量進行Hilbert變換:

經Hilbert反變換:

構造解析信號:

其中,αi(t)和φi(t)分別為ci(t)的瞬時幅值和瞬時相位。
對φi(t)求導,得到ci(t)瞬時頻率為:

經過Hilbert變換可以得到任意信號的幅頻曲線以及時頻圖,與其他信號處理方法相比,能對非平穩信號進行分解,且具有自適應性的優點。
1.3 深度卷積殘差神經網絡
卷積神經網絡(Convolutional neural network,CNN)是受生物神經科學領域啟發設計的主要用于圖像處理的深度前饋神經網絡,典型的CNN結構由輸入層、卷積層、池化層、全連接層以及輸出層組成[11]。深度神經網絡的層數越深,對于復雜特征的表達能力越強,但同時會帶來梯度消失、梯度爆炸、訓練難以收斂、準確率低等問題[12]。批量歸一化(Batch Normalization)一定程度解決了梯度消失、爆炸問題,但對于更深層次的網絡,訓練準確率低、難以收斂成為模型向更深層數發展的障礙。
針對這一問題,殘差神經網絡引入殘差學習來優化深層網絡的學習,使用多個有參層學習輸入、輸出間殘差,取代之前直接學習輸入、輸出間映射的方法,解決了這一問題[13]。假設殘差F(x)=H(x)-x,現在不直接學習H(x)而去學習F(x)+x,即將學習H(x)的問題轉化為學習(H(x)-x)+x,這種轉化使學習更易優化,使網絡層數大大增加,殘差塊結構如圖1所示。
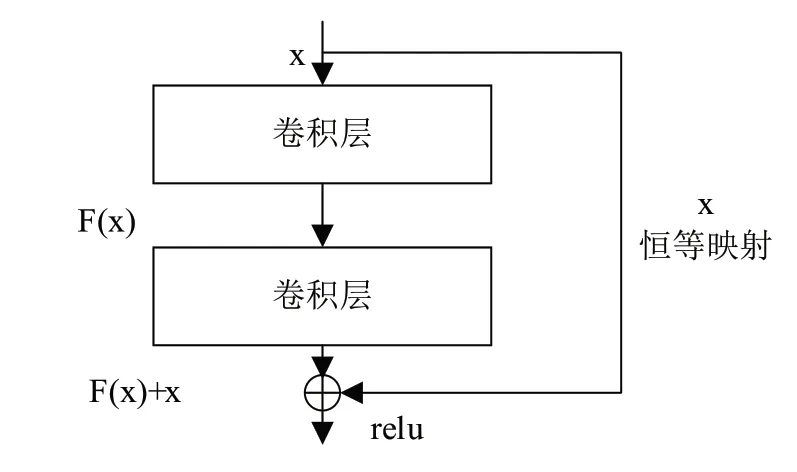
圖1 殘差單元結構圖
殘差塊由兩層組成,即:


其中σ表示激活函數Relu,這種結構不會增加額外參數和計算量,卻大大增加了模型訓練速度和準確率[14]。
2 基于HHT和深度殘差神經網絡的故障診斷
基于HHT和深度殘差神經網絡的故障診斷流程如圖2所示。
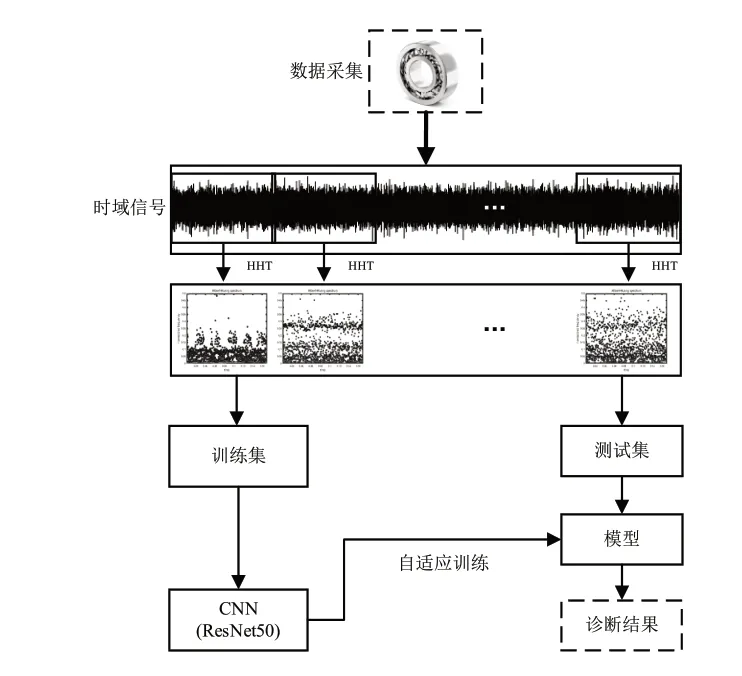
圖2 軸承故障診斷流程圖
模型示意圖如圖3所示,選用具有50層深度的殘差神經網絡對樣本進行訓練,輸入圖像尺寸為224×224×3,經過一層7×7的卷積,歸一化和最大池化后,尺寸變為56×56×256,之后跟著四個殘差塊,最后轉變為1000點的全連接層,經過Softmax分類器實現樣本的分類。
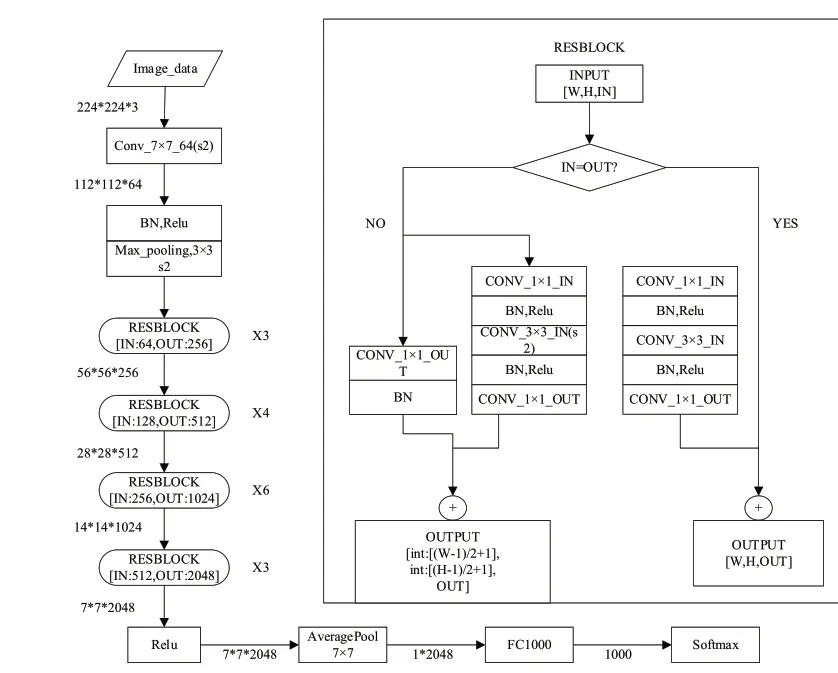
圖3 ResNet50網絡結構
具體診斷步驟如下:
1)利用數據采集器,傳感器等采集軸承工作時的振動數據,對原始時域信號進行EMD分解,得到不同諧波分量的IMF;
2)對分解出的IMF分量進行Hilbert變換,得到時頻分布圖;
3)將得到的各個狀態時頻圖標記,輸入到建立好的深度殘差卷積神經網絡模型中進行訓練,直到訓練集和驗證集的損失值停止下降時,結束訓練;
4)將未進行訓練的樣本集輸入到模型,測試診斷準確率,保存模型。
3 實例分析
為驗證方法的可行性,使用凱斯西儲大學的滾動軸承數據。
3.1 數據描述
凱斯西儲大學的滾動軸承數據廣泛應用于狀態監測與故障診斷領域,該數據采用電火花加工了內圈,外圈和滾動體三種故障,每種故障分別有0.01778cm,0.03556cm和0.05334cm三種損傷程度,加上正常樣本數據,共有10種狀態類別。電動機風扇端和驅動端的軸承座上方各放置一個加速度傳感器用來采集故障軸承的振動加速度信號。振動信號由16通道數據記錄儀采集得到,采樣頻率為12kHz,驅動端軸承故障還包含采樣頻率為48kHz的數據,軸承試驗臺示意圖如圖4所示。
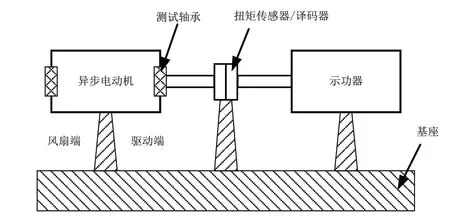
圖4 軸承試驗臺示意圖
3.2 試驗步驟
使用采樣頻率為12kHz的驅動端數據。在數據樣本的10種標簽中,每類標簽選擇100個訓練數據,NL,B,IR,OR分別代表正常,滾動體,內圈和外圈故障,B1,B2,B3代表不同故障深度。每個樣本數據截取2048個點,最終得到10種標簽的共1000個樣本,進行Hilbert-Huang變換后得到時頻分布圖,按照6∶2∶2的比例分為訓練集,驗證集和測試集,將訓練集和驗證集輸入到ResNet50模型中訓練,測試集用于測試訓練模型診斷準確率。
3.3 仿真結果分析
為使模型更快擬合,使用深度學習Pytorch框架的GPU計算,最終模型對驗證集診斷準確率為98.85%。圖5表示模型的混淆矩陣,除標簽為B1的樣本中,驗證集有6%被誤判為正常,其余標簽全部被正確分類。
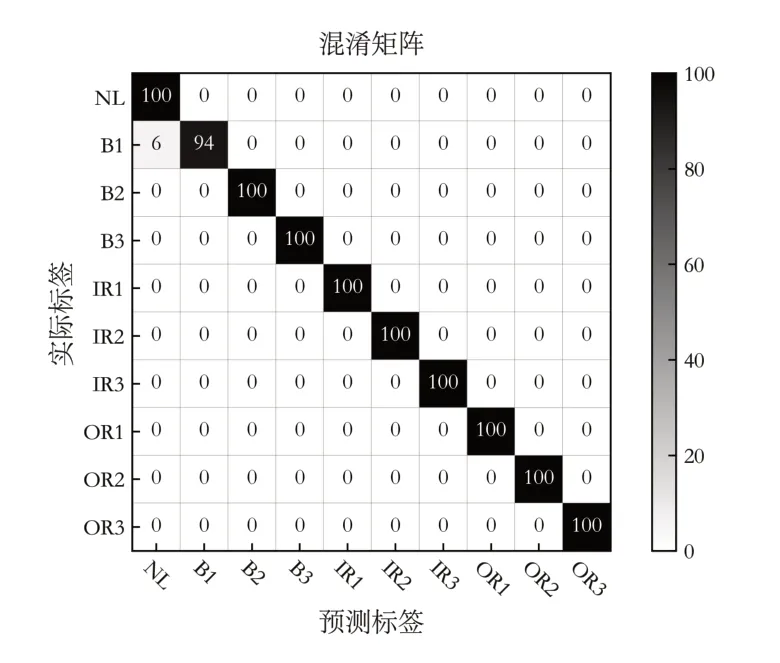
圖5 驗證樣本的混淆矩陣
圖6表示模型對不同故障類型的識別準確率,用測試集的200個樣本對模型進行測試,結果表明,除類別OR1的一個樣本被誤判為B3,其余類別均識別正確,測試準確率達99.5%。
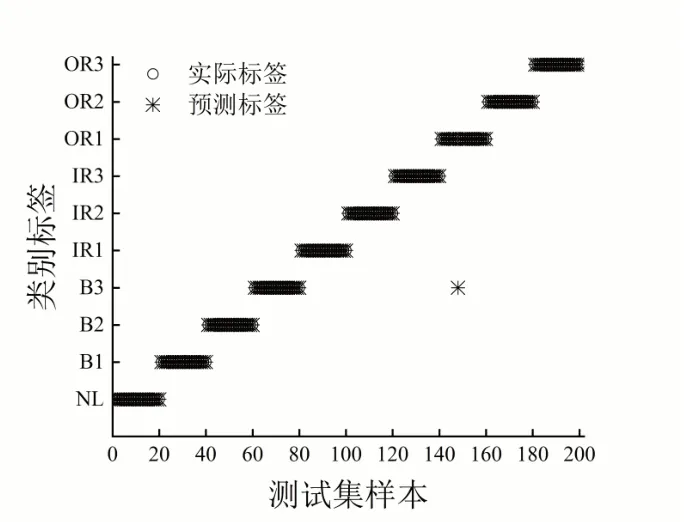
圖6 測試結果
4 結語
提出了一種基于HHT和深度殘差神經網絡的軸承故障診斷方法,該方法可以直接處理原始振動信號,無需手動提取特征。通過凱斯西儲大學的軸承數據對所提方法進行了測試,結果表明,該方法可有效對軸承進行振動信號特征提取和故障診斷,診斷準確為99.5%,是一種可行的診斷方法。
猜你喜歡
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
汽車維修與保養(2019年7期)2020-01-06 03:30:42
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
