基于反步法和分層滑模控制的輪式移動機器人軌跡跟蹤
2022-06-28 17:46:32耿志偉楊雙義
制造業自動化 2022年6期
耿志偉,王 爽,楊雙義
(鄭州工業應用技術學院,鄭州 451151)
0 引言
近年來,輪式移動機器人由于其結構簡單,易于控制,負重大,運動靈活等特點,被廣泛地應用于農業、工業以及服務業等領域,凸顯了極其優越的應用前景[1]。針對移動機器人軌跡跟蹤控制技術的研究一直是機器人領域的研究熱點。輪式移動機器人是一個典型的強耦合、非線性、非完整的約束系統,在實際工作中還會受各種工作環境的影響,這使得其軌跡跟蹤控制具有極大的挑戰性[2]。
輪式移動機器人的軌跡跟蹤是指機器人在某一初始位置,通過控制器的作用使得機器人的運動能夠跟蹤一條和時間相關的期望軌跡[3]。目前,國內外學者對輪式移動機器人的跟蹤控制問題進行了研究,其研究方法包括自適應反步法,自適應滑模控制,神經網絡控制,模糊控制等[2~5]。文獻[4]基于反步設計方法研究了一類輪式移動機器人的軌跡跟蹤問題。文獻[5]在反步法的基礎上,將自適應控制方法結合,設計了可以補償不確定參數的自適應控制器。然而對于諸如倒立擺,移動機器人等欠驅動非線性系統,滑模控制作為一種具有完全魯棒性的變結構控制方法,對這類系統具有較好的控制作用[6,7]。文獻[8]利用分層滑模控制把非線性系統解耦成各個子系統,以各個子系統系統漸進穩定為性能指標實現對整個系統的控制,該方法為復雜的高階系統控制提供了一個良好的解決方案[9]。
基于以上分析,本文結合反步法和分層滑模技術研究了一類輪式移動機器人的軌跡跟蹤問題。首先將原系統分解為兩個子系統,然后對子系統分別利用反步法和分層滑模技術設計了一個新的控制器。在該控制器下,可以確保閉環系統在Lyapunov意義下是漸進穩定的,從而實現系統跟蹤誤差的漸進收斂。
1 輪式移動機器人的數學模型
本文考慮了一類在水平面上移動的三輪移動機器人,以移動機器人運動時的正方向為x軸,垂直于機器人移動方向為y軸,坐標系下的結構圖如圖1所示。圖中假定兩個驅動輪是相同的,其半徑用r表示,后輪軸的長度用L表示。該輪式移動機器人由差動驅動的,所以后輪是主動的,通過兩個 后輪的不同速度來控制機器人的速度和轉向,機器人的驅動和轉向是獨立執行的,添加前腳輪只是為了車輛的穩定性。在X-Y坐標系中,該機器人的位姿(位置和方向)由向量q=[x,y,θ]表示,[x,y]表示機器人在運動中的位置;θ為機器人在運動中前進方向與X軸的夾角,即轉向角。
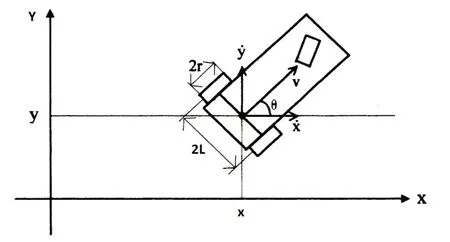
圖1 X-Y坐標系下輪式移動機器人模型
在不考慮摩擦力、向心力、側滑等外部擾動因素下,利用如下的歐拉-拉格朗日方程建立描述輪式移動機器人的動力學方程如式(1)所示:
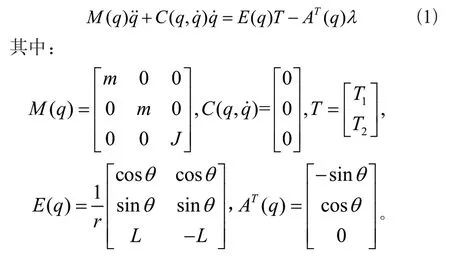
m和J表示機器人的質量和轉動慣量,TL,TR表示與從動輪相關聯的左右電機的扭矩。
輪式機器人在移動過程中不考慮側滑和后滑時,即輪式移動機器人的運動方程始終垂直于車軸,其機器人受如下的非完整運動學約束:

此外,給定如下的拉格朗日乘數:

根據文獻[2]的結果,則上述輪式移動機器人的動力學模型可以進一步表示如式(2)所示:
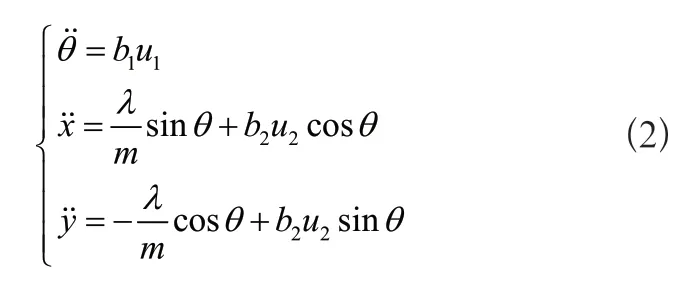
其中b1=L/(rJ),b2=1(rm),u1=TR-TL和u2=TR+TL表示系統(2)的控制輸入。
2 基于反步法和分層滑模法的控制律設計
該輪式移動機器人的數學模型(2)可以分解為兩個子系統。第一個子系統只依賴于控制輸入u1,第二個子系統依賴于控制輸入u2。因此,輪式移動機器人的軌跡跟蹤控制器由兩個部分組成:1)由反步法來設計控制器u1;2)利用分層滑模技術來產生控制器u2。其具體設計流程如下。
2.1 基于反步法角度跟蹤控制律設計
由于控制器的設計目標是確保在X-Y坐標系上實現軌跡跟蹤,定義如下的跟蹤誤差如式(3)所示:

為了使機器人的轉向角θ跟隨參考角θr,本文基于反步法,通過構造Lyapunov函數來設計系統的控制律。
定義狀態變量:

其中α1表示子系統(4)的虛擬控制輸入。
考慮如下的Lyapunov函數如式(5)所示:

對式(5)求關于時間的導數,可得如式(6)所示:


選取如下Lyapunov函數:
對式(8)求關于時間的導數得:

因此,控制律u1可以設計為如式(10)所示:

其中k2>0是設計的常數。將式(10)代入式(9)化簡得:

根據Lyapunov穩定性定理可得,通過設計控制律(10)可以使誤差模型(4)漸進穩定,這也意味著轉向角θ能漸進收斂于參考角θr。
2.2 基于分層滑模法的位置跟蹤控制律設計
分層滑模控制是另一種李雅普諾夫設計方法,主要適用于欠驅動非線性動態系統。這種方法也適用于由多個子系統組成的系統。一個子系統的滑動面定義為第一層滑動面。這個過程一直持續到包括整個子系統的滑動面。其控制律是由李雅普諾夫理論推導出來的。
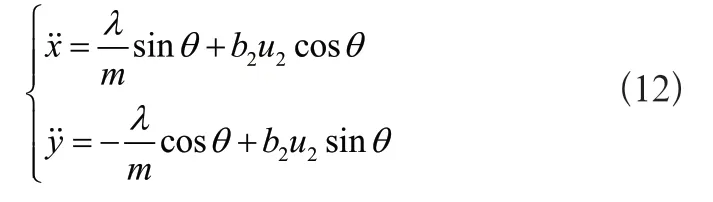
根據系統(2),我們可以得到第二個子系統如式(12)所示:
定義新的狀態變量:

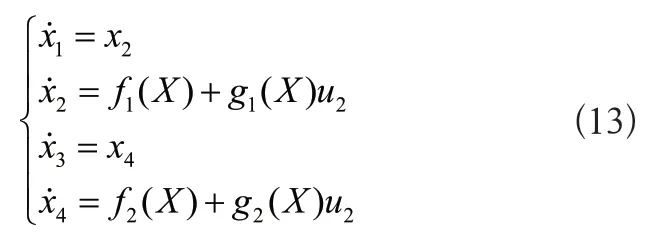
則子系統(12)的狀態空間方程可以進一步描述如式(13)所示:
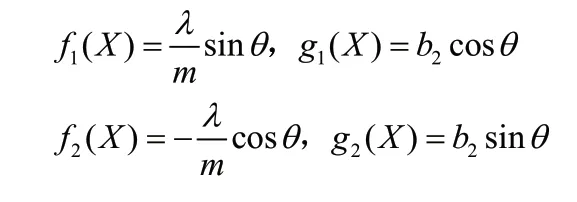
其中:
根據式(3)中定義的位置跟蹤誤差結合第二個子系統(10),可得誤差系統的狀態空間方程如式(14)所示:
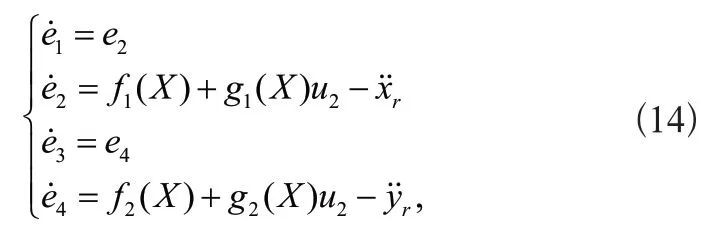
其中e1=ex,e3=ey。
我們可以將系統(14)進一步考慮為兩個子系統,其第一個子系統如式(15)所示:

其中u21作為系統(15)的虛擬控制輸入。
定義第一層滑模函數如式(16)所示:

其中c1>0滿足Hurwitz條件。求得S1的導數如式(17)所示:

其中u21=ueq21+usw21,ueq21和usw21分別表示虛擬控制輸入u21的等效控制和開關控制,可以設計為:

其中l1>0和η1>0是設計的參數,sgn(S1)表示S1的符號函數,通過將等效控制輸入ueq21和開關控制數如usw21代入(17),式(17)可以進一步化簡為:

定義第二層滑模函數為:

其中c2>0滿足Hurwitz條件。因此求得S2的導數為:
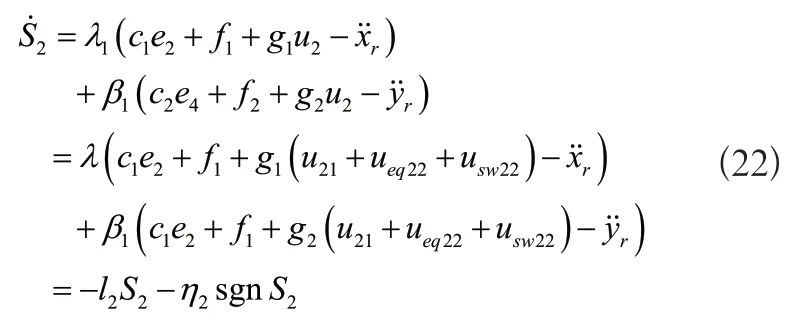
設計如下的虛擬控制輸入:

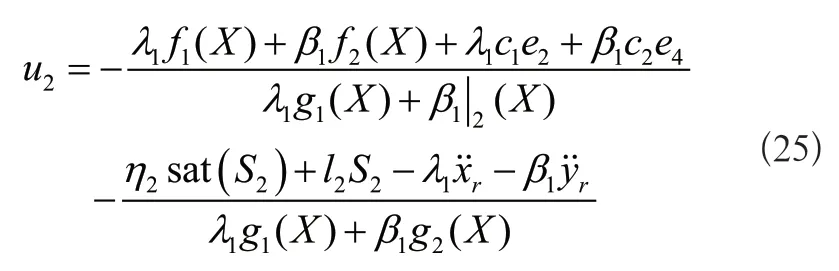
其中l2>0,η2>0是設計的參數。根據虛擬控制輸入信號式(18)、式(19)、式(23)、式(24),我們可以得到第二個子系統(12)的實際分層滑模控制律如式(25)所示:
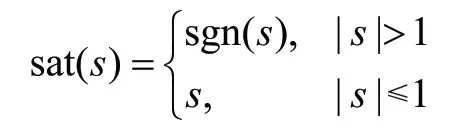
為了最大限度減少滑模函數帶來的高頻顫振,我們把(25)中原來的符號函數用飽和函數替代,其定義如下:
基于反步法和分層滑模控制技術,我們就可以設計出系統(2)的實際控制輸入u1,u2,進而實現對參考信號的跟蹤控制,具體的算法流程如圖2所示。
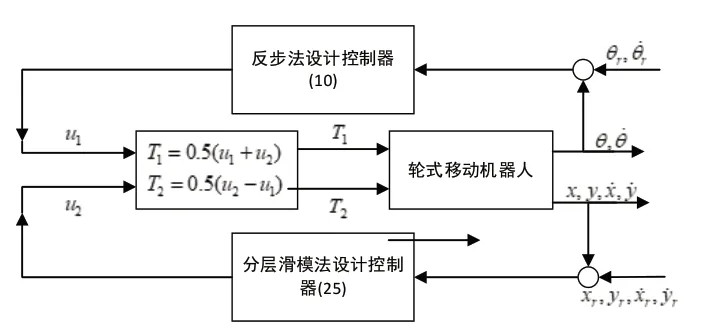
圖2 基于反步法和分層滑模法的系統控制
2.3 閉環系統的穩定性分析
本節將給出基于閉環系統漸近穩定性的證明。
定理1 考慮二階系統(1),采用由反步法設計的控制律(10)和分層滑模技術設計的控制律(25),則可以設計出系統的實際控制律如式(26)所示:

在該控制律下,閉環系統是漸進穩定的。
證明:考慮如下Lyapunov函數為:

對式(27)求關于時間的導數,結合式(11)和式(22),可得下列不等式:

對于z1,z1≠0,我們有。因此該閉環系統在Lyapunov意義下是漸進穩定的,這意味著系統的跟蹤誤差可以收斂到任意小的領域,實現系統的跟蹤性能。
3 仿真分析
為了驗證所提出理論的有效性,本文通過MATLAB仿真進行驗證。該輪式移動機器人的模型參數設計為:質量m=1.038kg,慣性力矩J=0.818kg/m2,r=0.025,L=0.075m,b1=2,k2=4,c1=75,c2=75,l2=5,η2=5,α1=120,β1=200。
圖3 給出了輪式移動機器人在初始位姿為q0=[0,0,π/30]T時,對正弦參考軌跡的跟蹤仿真結果,圖4展示了輪式移動機器人跟蹤正弦軌跡時位置和轉向角的跟蹤誤差。圖5展示了輪式移動機器人在在初始位姿為q0=[1,0,π/2]T時對圓形軌跡的跟蹤結果,圖6展示了輪式移動機器人跟蹤圓形軌跡時位置和轉向角的跟蹤誤差。從仿真結果可以看出,在所提出的控制方法下,輪式移動機器人的實際軌跡較為精確地跟蹤了期望軌跡。
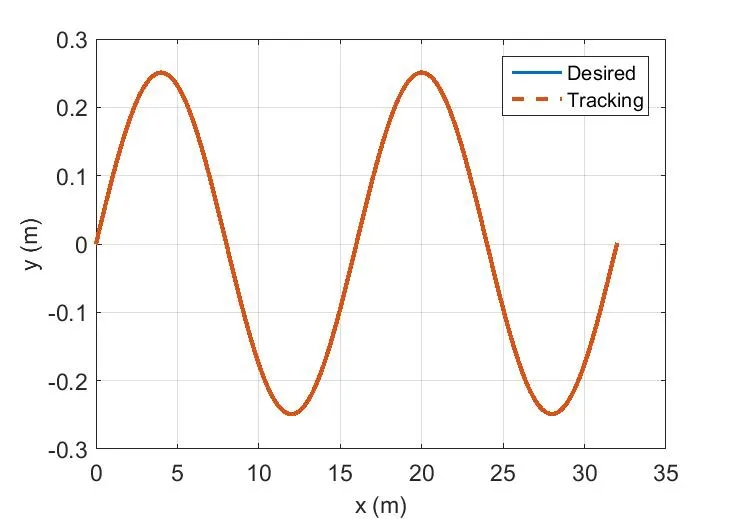
圖3 在X-Y坐標系中對正弦軌跡的跟蹤結果
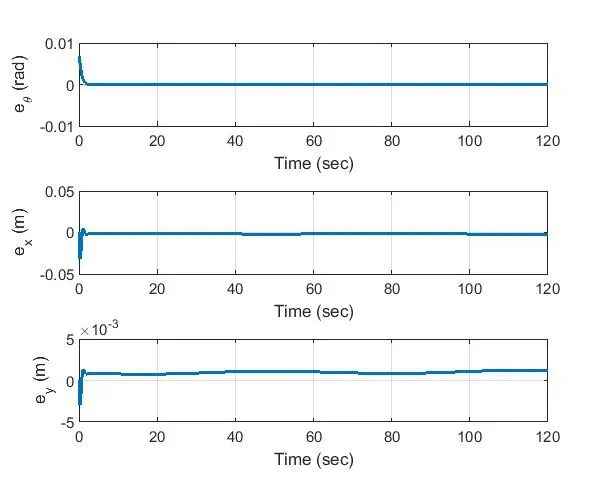
圖4 正弦軌跡的位姿跟蹤誤差
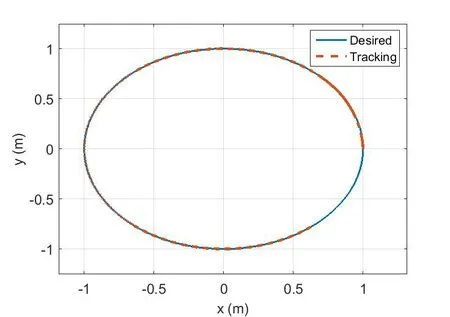
圖5 X-Y坐標系中對圓軌跡的跟蹤結果

圖6 圓軌跡的位姿跟蹤誤差
4 結語
本文提出了一類輪式移動機器人的軌跡跟蹤控制算法。結合反步法和分層滑模技術設計的控制器,在機器人軌跡跟蹤控制問題上顯示出其良好的實用能力。通過仿真結果驗證了所提出控制策略的有效性。在未來的工作中,我們將在輪式移動機器人模型中進一步考慮自適應控制,事件觸發控制等控制方法,豐富其理論研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
制造技術與機床(2017年3期)2017-06-23 08:11:21
Coco薇(2017年5期)2017-06-05 08:53:16
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
