高鐵巡檢機器人的設計與研究
2022-06-28 17:46:36楊建峰洪曉芳
制造業自動化 2022年6期
楊建峰,洪曉芳
(山東勞動職業技術學院 電氣及自動化系,濟南 250300)
0 引言
鐵路是國家發展的重要基礎設施、是大眾化的交通工具和國民經濟的大動脈。安全原則是任何一個交通設施及設備都必須具備的首要原則,高鐵是在一個相對封閉的環境中自動運行,有一整套完整的安全保障系統。但由于火車長時間的運行,火車車廂連接處螺栓會出現松動,如不及時修整,本來螺栓微小的松動就可能擴大,有可能導致嚴重的交通事故,造成巨大的人員傷亡和經濟損失。因此,需要對火車進行定期的維護和巡檢,巡檢工作也正是為了保證高鐵安全的運行。
目前,國內的巡檢機器人主要應用于變電站、高壓輸電線、隧道領域,而應用到高鐵領域相對較少。隨著中國加速邁進“高鐵時代”的步伐,隨著乘客對乘坐質量和可靠性要求的進一步提高,檢測部門必須加強對高鐵的檢測工作,同時也加大了巡檢工人的勞動強度和危險性。因此,為了保證高鐵運行的可靠性,提高巡檢的效率,開發一種替代或者部分替代巡檢工人進行巡檢作業的機器人一直是國內外相關研究領域的研究熱點之一。本文主要針對高鐵維護檢修工作設計一種巡檢機器人并開展研究工作[1]。
1 巡檢機器人模塊化設計
巡檢機器人需要在高鐵V型軌道上保持直線行駛,軌道為水泥地面,為了使巡檢機器人直線行駛,需要保證兩邊V帶所受摩擦力均勻,才可以使機器人保持直線行駛。根據特殊的運行環境,設計巡檢機器人,機器人主要組成包括控制系統、驅動系統、傳動系統、通訊系統、感知系統。控制系統的控制器選用工控機,包括遠程監控主機、機器人本體主控機(組織級)和下位機(執行級)。驅動系統由兩個直流碳刷驅動電機、兩個行星減速器和兩個增量編碼器組成。傳動系統采用履帶式行走機構,增加機器人同V型軌道的接觸面積,提高機器人運動時的摩擦力,進而增加機器人運行的穩定性,其主要包括驅動輪、拖輪、引導輪、履帶。感知系統主要包括傾角傳感器、溫度傳感器、視覺相機。通訊系統采用CAN總線和無限傳輸設備進行串口通訊和實現機器人與遠程計算機的通訊[2]。利用SolidWorks建模得到三維模型如圖1所示。
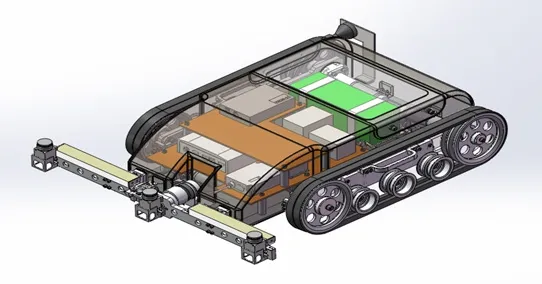
圖1 巡檢機器人三維模型
2 巡檢機器人軌道跟蹤
巡檢機器人的主要任務是檢測車廂連接處的螺栓是否松動,視覺相機固定在機器人本體上,為了保證視野更加清晰,所以需要始終保持巡檢機器人處于V型軌道的正中間,也就是希望巡檢機器人可以在V型軌道上保持中間位置直線行駛。由于運動過程中左右兩邊履帶摩擦力會不斷變化,導致巡檢機器人不能夠一直處于中間位置,所以需要實時監測電機運行速度,并調節左右電機轉速得以一致,從而使得巡檢機器人始終處于中間位置。首先由傾角傳感器測得巡檢機器人傾斜角,再由工控機進行PID控制,最終調節左右電機轉動速度,以保證巡檢機器人始終處于V型軌道中間位置。
傾角傳感器監測巡檢機器人傾斜角,需要建立傾角傳感器模型;巡檢機器人電機轉速的變化,需要建立運動學模型。
2.1 傾角傳感器模型
為了控制巡檢機器人,首先需要知道巡檢機器人的傾斜角度,然后利用控制算法,將巡檢機器人調節到水平位置,這個過程中需要建立傳感器模型。由于很難直接建立d=f(θ)函數方程,課題組經過實驗發現在傾斜角處于不同區間時,電機轉速不同。因此,由工控機控制調節巡檢機器人每次的傾角,便可進行速度控制[3]。
將巡檢機器人放置V型軌道試驗平臺,測量偏移距離與機器人X、Y軸的傾斜角度,試驗一共分為兩組,一組左偏,一組右偏,每組總共測量15組數據,將測量的數據繪制成散點圖,如圖2(a)、圖2(b)所示。
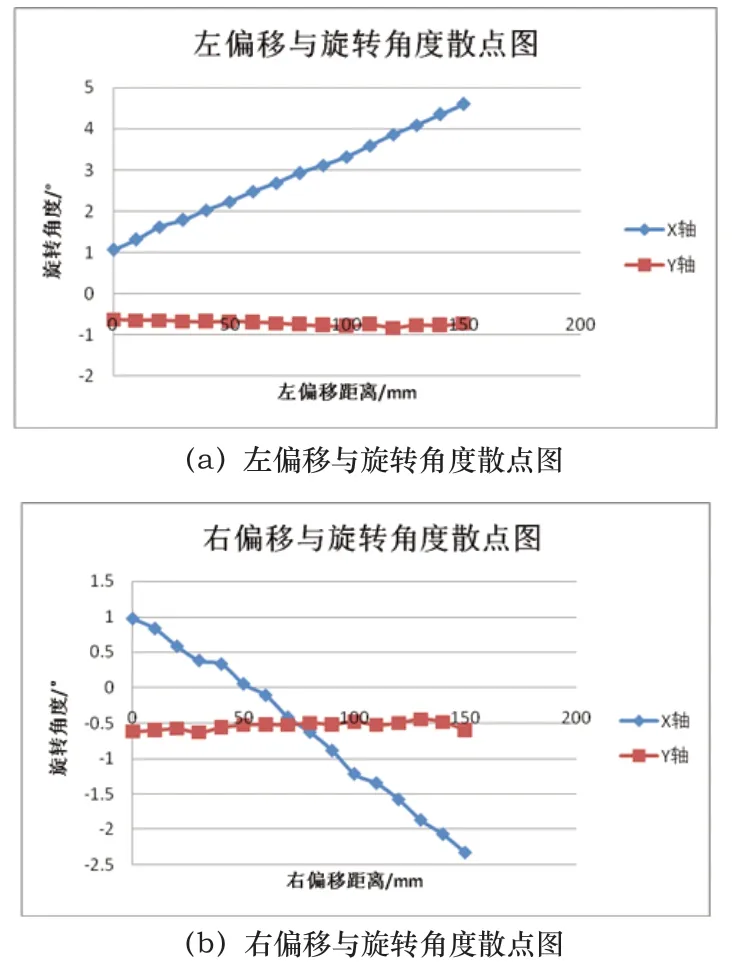
圖2 實驗組數據示意圖
根據以上散點圖的變化趨勢,我們發現當機器人左、右偏移時,偏移距離與X軸旋轉角度大成正比例,Y軸旋轉角度保持不變。
2.2 運動學模型
巡檢機器人采用的是底盤兩側的V帶差動驅動方式,由于巡檢機器人需要在火車V型軌道上行駛,而V型軌道相對光滑,摩擦力小,這就需要應用V帶以增加摩擦力。高鐵巡檢機器人在V型軌道上保持直線行駛運動方式有兩種:直線運動和圓弧運動。巡檢機器人在V型軌道上的運動有四種常見的狀態,如圖3所示。
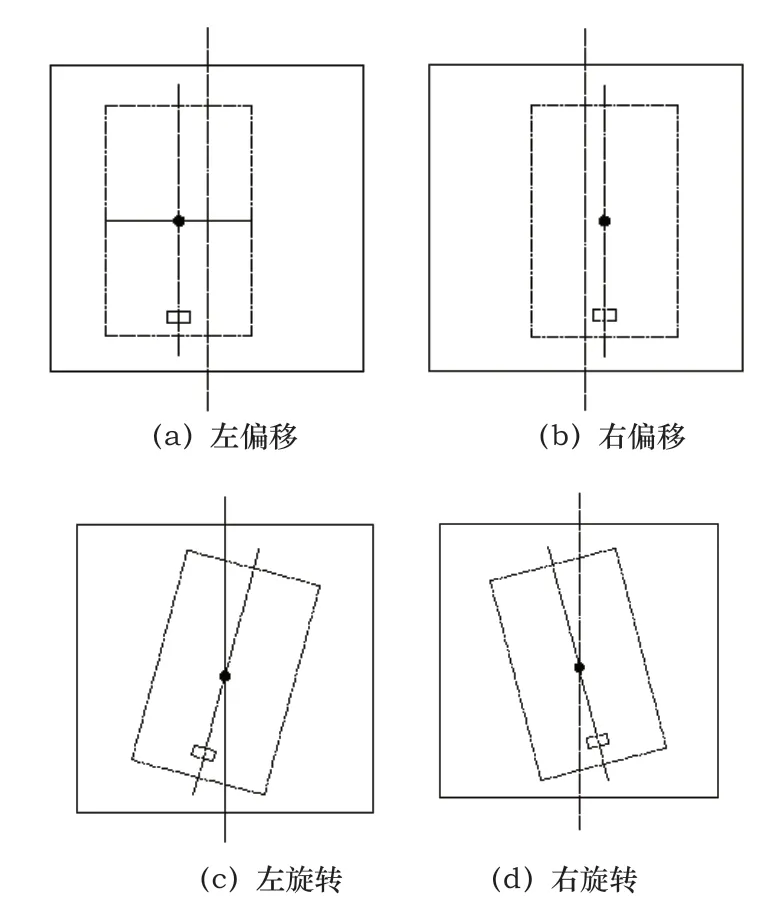
圖3 巡檢機器人運動狀態
為了便于運動學分析,建立機器人差速驅動運動學模型[4],如圖4所示。
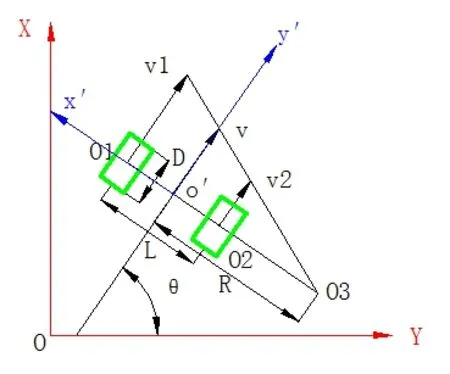
圖4 機器人差速驅動運動學模型
其中{X,Y,O}為世界坐標系,{x′,y′,o′}為機器人坐標系,其中o′x′為機器人的縱向,o′y′為機器人的橫向,o′為機器人的平面幾何中心。01為機器人左側帶輪中心,02為機器人右側帶輪中心。v1為機器人左側V帶在世界坐標系中的速度,v2為右側V帶在世界坐標系中的速度,v為機器人中心速度。L是機器人兩側帶輪之間的距離。D是機器人帶輪直徑加上V帶兩側的長度D=146.24mm。θ為機器人運動坐標系y′軸與世界坐標系Y軸之間的夾角,當θ>0為右偏移,反之θ<0為左偏移。
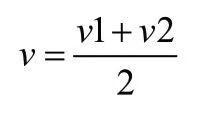
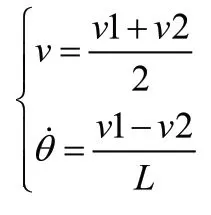
如圖4所示,03是機器人運行的速度瞬心,在低速運轉時忽略橫向滑動的影響,輪子與地面間滿足純滾動條件,假設機器人保持理想運動狀態。根據運動學基本知識分析,得到點o′的速度v的大小為:
設機器人的旋轉角速度為θ˙,如圖4所示機器人做順時針轉動得:
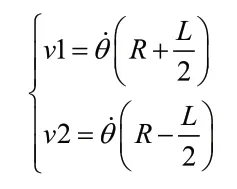
由上式解得機器人的角速度大小為:
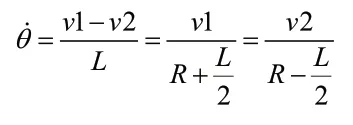
根據剛體平動原理,機器人在任一時刻的運動都可以看做是繞機器人速度瞬心03的轉動,得轉動半徑R為:
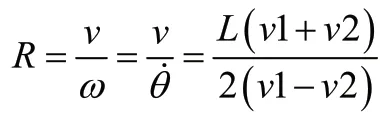
從而得到差速驅動方程為:
由v1,v2之間的大小關系決定了差速驅動的三種運動方式:
1)當v1=v2時,v=v1=v2,R=+∞,此時機器人做直線運動。
2)當v1=-v2時,v=0,R=0,此時機器人做原地回轉運動。
3)當v1≠v2且當v1≠-v2時,,此時機器人做圓弧運動,瞬時轉向半徑:
通過以上分析和計算可知,只要改變左右電機的轉速就可以改變機器人的姿態。因此,為了使得機器人在V型軌道上保持直線行駛,可以通過控制左右電機轉速來實現[5]。
3 巡檢機器人控制系統
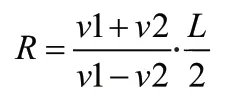
巡檢機器人的控制系統包括遠程監控主機、機器人本體主控機和下位機。遠程監控主機由監控主機和無限單兵設備組成,工作在監控室,主要功能是圖像處理和存儲,要求處理速度快和存儲空間大。因為遠程監控主機在地面工作而且遠離干擾源,所以工作環境相對穩定,一般選用高性能、體積小、重量輕、便于攜帶的筆記本電腦。機器人本體主控機采用IPC,作為控制系統的中心。下位機系統主要負責接收主控機的指令和各路的傳感器信號,實現對電機的速度和位置的閉環控制[6]。結合巡檢機器人的控制特點和實際的工作要求,最終確定了控制系統的組成如圖5所示,高鐵巡檢機器人的主控界面如圖6所示。
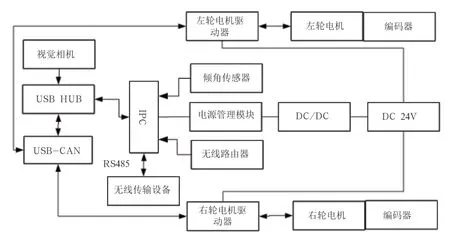
圖5 控制系統結構設計圖
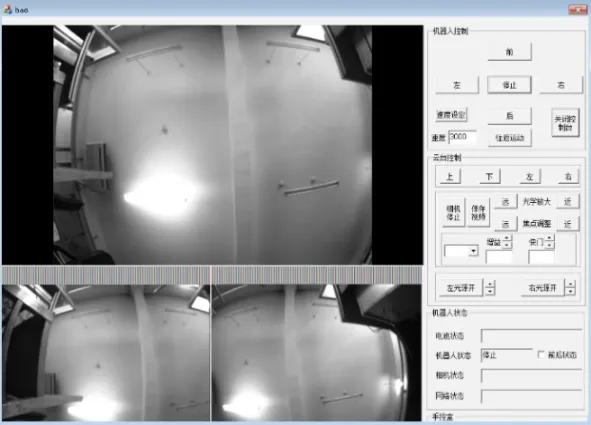
圖6 高鐵巡檢機器人的主控界面
4 調試與試驗
為了檢測巡檢機器人運行的可靠性與穩定性,課題組自行搭建了高鐵V型軌道。在試驗室里搭建了長度為5米,寬1.5米,傾斜角為5度的V型軌道試驗平臺,如圖7所示。
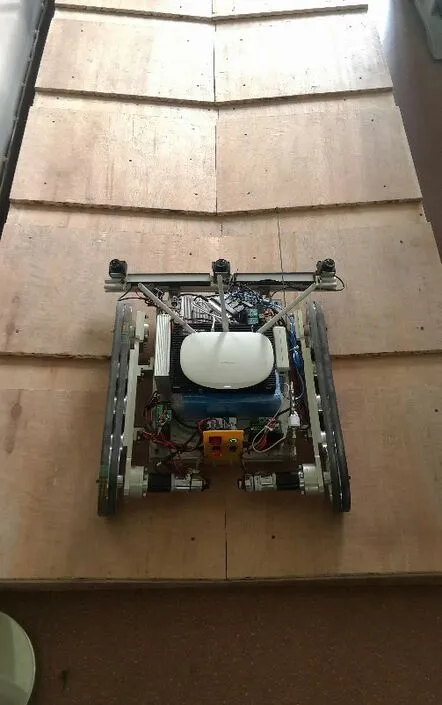
圖7 V型軌道試驗平臺
將巡檢機器人置于V型軌道試驗平臺上進行試驗,并檢測控制界面是否符合人機交互的基本要求。經過多次試驗,控制器接受傾角傳感器發送的機器人運行角度數據,再通過增量式PID算法調節左右電機轉速,使得巡檢機器人處于V型軌道中間位置,能夠保證巡檢機器人在V型軌道上進行直線平穩運動。
為了進一步檢測巡檢機器人的穩定性以及,課題組來到了高鐵站進行了實地試驗,試驗錄像截圖如圖8所示。
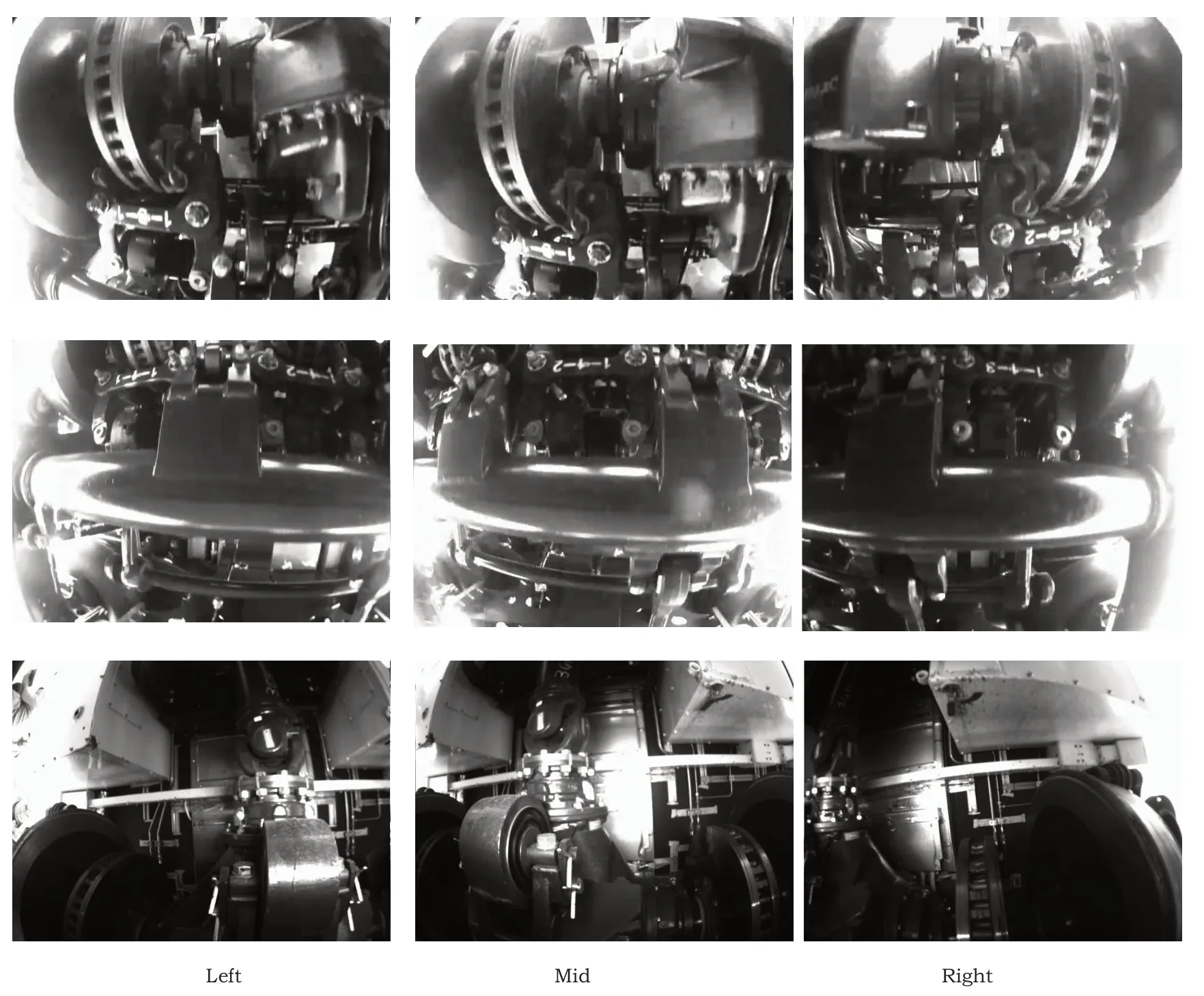
圖8 現場試驗采集圖像
通過現場試驗發現,巡檢機器人能夠按照既定的軌道路線直線穩定行駛,在行駛過程中機器人上的攝像頭能夠對車廂連接處部位進行穩定高清拍照。運動過程中機器人通訊穩定,采集到的照片信息數據可以實時在監控室查看,工作人員能夠根據圖片信息作出檢測分析,確保連接處的安全可靠。
5 結語
針對國內快速發展的高速鐵路網,為保證運行的安全與穩定,鐵路及機車的日常維護與檢修顯得異常重要。基于此本文設計了一種高鐵巡檢機器人。針對巡檢機器人的機械本體結構,確定各個模塊的組成及整體的結構方案,并完成了巡檢機器人的控制系統設計,編寫了上位控制應用及下位機控制算法,以及在控制系統的控制下完成巡檢機器人的相關檢修試驗,通過試驗證實了巡檢機器人在軌道運行的穩定性、快速性以及檢修的有效性,這極大改善了維護與檢修的工作條件及強度,提高了工作效率。
