含風電互聯電網負荷頻率魯棒控制模型構建
2022-06-28 17:46:50張東升許中平
制造業自動化 2022年6期
張東升,許中平,郭 翔
(國網遼寧省電力有限公司鞍山供電公司,鞍山 114000)
0 引言
建設多領域互補的綜合能源互聯電網,可提升能源利用率[1]。風力發電的隨機性較大,導致風電并網為電力系統帶來巨大沖擊,影響電力系統的平衡度,加大互聯電網頻率控制難度[2]。為此通過設計智能的互聯電網負荷頻率控制模型,可確保互聯電網頻率穩定,及時補償缺失負荷頻率,確保互聯電網的安全運行[3,4]。呂永青等人依據荷電狀態(SOC)與通信延遲,設計負荷頻率魯棒控制模型,通過回歸修正SOC,確保SOC裕度更新,依據SOC裕度更新結果與通信延遲情況,建立負荷頻率魯棒控制模型,該模型可有效抑制可再生能源的功率擾動,快速調節并恢復頻率偏差[5]。李志軍等人利用變論域模糊PI理論,建立負荷頻率控制模型,設計變論域伸縮因子,動態修正論域,提升負荷頻率控制效果,該模型具備較優的負荷頻率控制效果,降低風電出力對互聯電網頻率穩定的影響[6]。這兩種模型均可有效將負荷頻率控制在指定區間,但互聯電網中風電比例逐漸擴大,增加電網的繁瑣程度,導致這兩種模型無法較好地控制隨機波動性擾動情況下的負荷頻率,導致其出現頻率魯棒控制效果較差問題,影響電網頻率穩定性。為在不同干擾下均可較好地魯棒控制負荷頻率,構建含風電互聯電網負荷頻率魯棒控制模型,提升魯棒控制效果。
1 二維云PI的含風電互聯電網負荷頻率魯棒控制模型
1.1 含風電互聯電網負荷頻率模型
利用二維云PI控制器,構建含風電互聯電網負荷頻率魯棒控制模型,通過果蠅優化算法優化二維云PI控制器參數,提升魯棒控制效果。
含風電互聯電網負荷頻率魯棒控制內容為負荷頻率與聯絡線功率。含風電互聯電網內包含發電機、原動機等;基于二維云PI的含風電互聯電網負荷頻率魯棒控制模型如圖1所示。
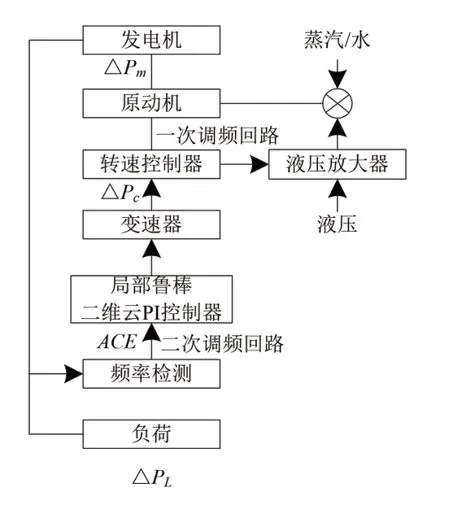
圖1 含風電互聯電網負荷頻率魯棒控制模型
調速器利用一次、二次調頻回路,獲取發電機頻率的變化情況,一次調頻確保調速器輸出無波動有功整定值,傳輸至發動機,利用液壓放大器修正功率,其使用工具為機械裝置調節節氣閥[7];二次調頻依據區域內頻率偏差Δf,獲取區域內控制偏差ACE,將其當成反饋信號,輸入局部魯棒的二維云PI控制器內,輸出調整信號ΔPc,完成含風電互聯電網負荷頻率魯棒控制。圖1中負荷功率變化量是ΔPL;發電機機械功率變化量是ΔPm。
利用搖擺微分方程,描繪發電機-負荷的功率差(ΔPm-ΔPL)和Δf間的關系,發電機-負荷模型公式如式(1)所示:

式(1)中,機組轉動慣量是N,N=2H;慣性系數是H;負荷阻尼系數是ξ;變量符號是s;轉子角頻率變化偏移量是Δω。
原動機包含水輪機與汽輪機[8],水輪機傳遞函數模型公式如式(2)所示:
式(2)中,導葉開度是y;流量是q;水頭是h;力矩對y、q對h、力矩對h、q對y的傳遞系數是ay、aqh、ah、aqy;水輪機時間常數是Tw。
汽輪機傳遞函數模型如式(3)所示:

式(3)中,增益系數是Kt;汽容時間常數是Tt;調差系數是R;再熱時間常數是Tr;再熱系數是Kr。
調速器傳遞函數模型如式(4)所示:

式(4)中,調速器增益、時間常數是Kg、Tg。
調速器通過暫時下降補償,提升含風電互聯電網負荷頻率魯棒控制效果,調速器補償傳遞函數模型如式(5)所示:
式(5)中,復位時間常數是Tλ;永久、暫時下降率是?、?′。
含風電互聯電網通過聯絡線傳遞功率,聯絡線功率偏差如式(6)所示:

式(6)中,區域i、j間聯絡線的功率偏差是ΔPi j;含風電互聯電網區域數量是n。
聯絡線功率Pij公式如式(7)所示:

式(7)中,聯絡線電壓幅值是Ui、Uj;線路電抗是Xij;電壓相角是δi、δj。
ΔPi j的公式如式(8)所示:

式(8)中,聯絡線同步系數是θij;δi與δj的變化量是Δδi、Δδj;
變更式(8)獲取:

在式(6)內引入式(9)獲取:

二次調頻二維云PI控制器輸入的ACE為:

式(11)中,頻率響應系數是Bi。
以ACE為二維云PI控制器的含風電互聯電網負荷頻率魯棒控制模型的輸入量,由Δfi與ΔPi組成該模型的控制量ui。
1.2 基于二維云PI的負荷頻率魯棒控制模型
利用二維云PI控制器理論,建立含風電互聯電網負荷頻率魯棒控制模型,由e′代表含風電互聯電網區域控制偏差ACE,將e′和e′的變化率Δe′輸入二維云PI控制器的前件二維云發生器(即二維條件云),二維云PI控制器通過二維云發生器完成數據間的轉換[9~11],通過后件一維云發生器輸出比例參數P′與積分參數I的整定值ΔP′、ΔI(即一維條件云),該魯棒控制模型實現的具體步驟如下:
步驟1:選擇二維云PI控制器的初始參數,選取不同參數[12],調試含風電互聯電網負荷頻率魯棒控制模型,獲取不同情景下動靜態質量較優的參數。
步驟2:通過1.2節獲取,含風電互聯電網區域控制偏差ACE,記作e′,求解鄰近兩時刻的Δe′,歸一化處理(e′,Δe′)與(ΔP′,ΔI),得到e′與Δe′的數據變化區間,歸一化處理公式如式(12)所示:
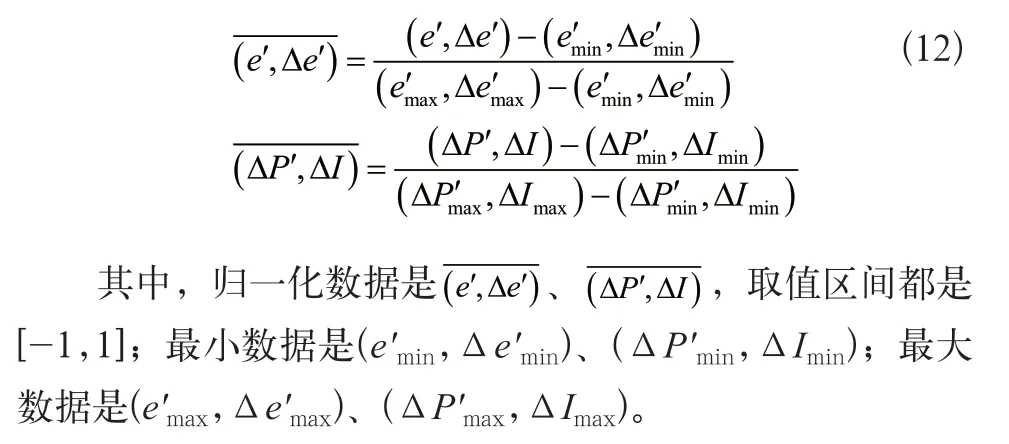
步驟3:按照編程的方式,由已生成的云映射規則完成云自適應算法,輸出ΔP′、ΔI。以語言變量為前提,構造二維云負荷頻率魯棒控制規則,利用云模型的數字特征期望E、熵En、超熵He描繪語言變量的七個模糊集[13],包含負中、零與正中等,因此輸入二維云PI控制器的數據是[E(e′),En(e′),He(e′)]、[E(Δe′),En(Δe′),He(Δe′)]。
構造e′×Δe′至ΔP′的映射、e′×Δe′至ΔI的映射,將其當成二維云PI控制器的負荷頻率魯棒控制規則,獲取二維雙輸入雙輸出云模型負荷頻率魯棒控制模型。
步驟4:在步驟3構建模型內,輸入e′,鄰近時刻偏差變換率Δe′,獲取一組確定度ρ,在一維條件云發生器內輸入ρ,以ρ為前件,獲取兩組含風電互聯電網負荷頻率魯棒控制信號云滴drop(P′,ρ)、drop(I,ρ)。
步驟5:在云發生器內輸入drop(P′,ρ)、drop(I,ρ),求解[E(e′),En(e′),He(e′)]、[E(Δe′),En(Δe′),He(Δe′)],將E的均值當成P′與I的整定值,則二維雙輸入雙輸出云模型負荷頻率魯棒控制模型的輸出是ΔP′、ΔI。
步驟6:由反歸一化后的ΔP′與ΔI[14],修正二維云PI控制器的含風電互聯電網負荷頻率魯棒控制模型初始參數,實時調整比例參數P′與積分參數I,則二維云PI控制器的含風電互聯電網負荷頻率魯棒控制模型計算公式如式(13)所示。

其中,魯棒增益是K′;負荷頻率魯棒控制模型輸出值是u(t′),即區域內頻率偏差Δf與聯絡線功率偏差ΔPi;時刻是t′;比例系數是積分系數是KI。
步驟7:反復操作步驟3至步驟6,完成下一時刻含風電互聯電網負荷頻率魯棒控制。
1.3 果蠅優化算法的負荷頻率魯棒控制模型參數優化
利用果蠅優化算法,優化二維云PI控制器的含風電互聯電網負荷頻率魯棒控制模型參數,分別是比例系數′與積分系數KI,具體步驟如下:
步驟1:設置負荷頻率魯棒控制模型參數優化的種群規模Q,最大迭代次數Zmax,隨機初始化果蠅群體位置,實數編碼負荷頻率魯棒控制模型參數[15],即在尋找時各果蠅個體的坐標編碼是′、KI;
步驟2:以嗅覺方式,果蠅個體尋找食物的方向與距離;
步驟3:求解第α個果蠅搜索食物的味道濃度值B(α),如式(14)所示:

其中,搜索食物的方向、距離是O(α)、Y(α)。
步驟4:將B(α)引進適應度函數F內,獲取果蠅個體味道濃度B′(α)=FS(α);
步驟5:找到尋找時最佳果蠅個體,即B′的最大值對應的個體;
步驟6:存儲最佳果蠅個體的位置坐標;
2 實驗分析
以某含風電兩區域互聯電網為實驗對象,該電網的區域容量是1000MW,光伏發電介入容量是100MW,風場接入容量是100MW,兩區域互聯電網的具體參數如表1所示。
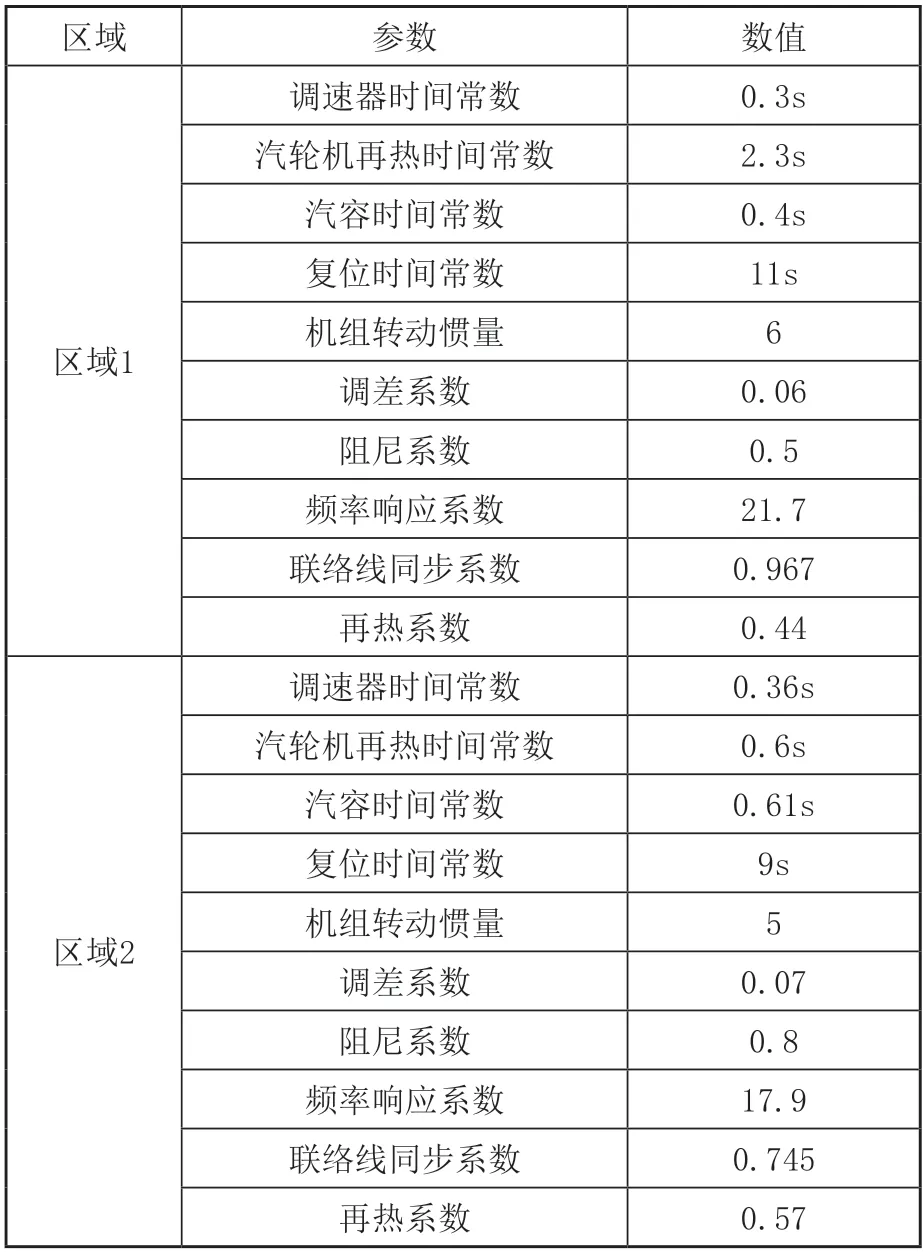
表1 兩區域互聯電網的具體參數
這兩個區域的典型日風速如圖2所示。
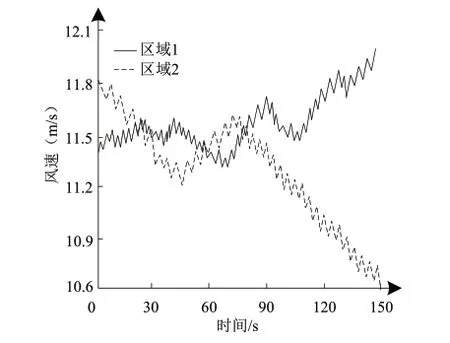
圖2 兩個區域的典型日風速
分析本文模型在隨機風力干擾下,該含風電兩區域互聯電網負荷頻率魯棒控制效果,分析結果如圖3所示。
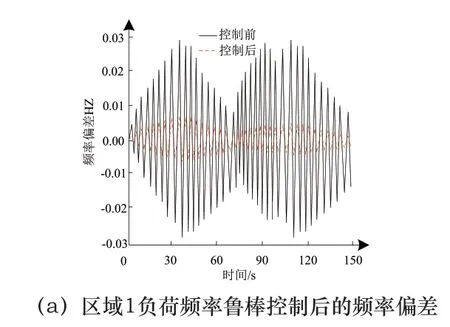
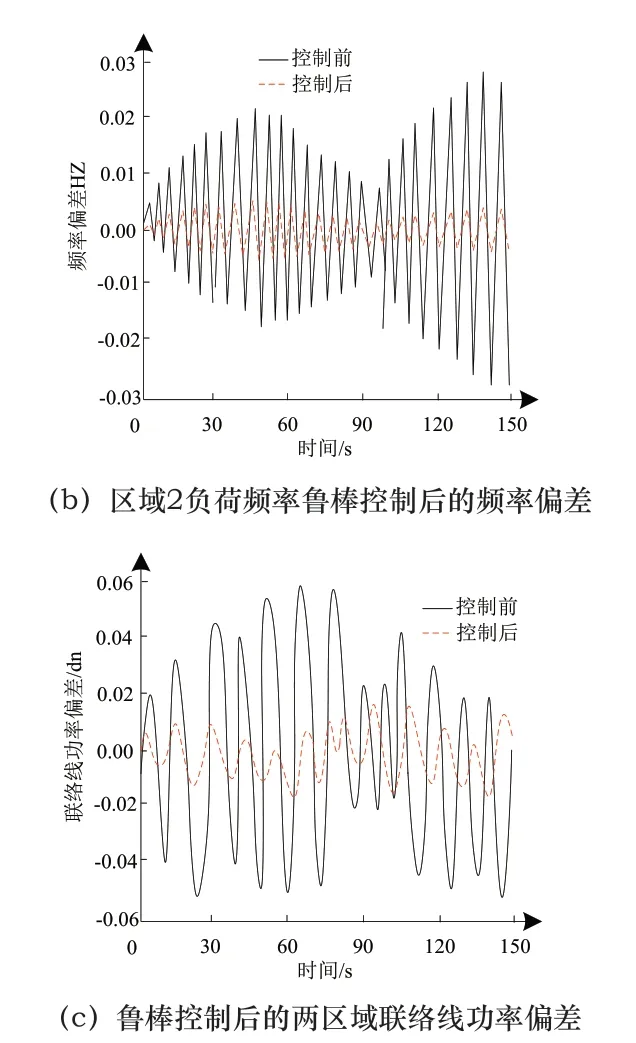
圖3 本文模型魯棒控制負荷頻率的測試結果
根據圖3可知,在隨機風力干擾下,本文模型可有效控制含風電兩區域互聯電網的負荷頻率,兩個區域的負荷頻率經過魯棒控制后的頻率偏差,明顯低于魯棒控制前,魯棒控制前兩個區域的頻率偏差波動范圍均是±0.03Hz,本文模型魯棒控制后兩個區域的頻率偏差波動范圍均是±0.01Hz;魯棒控制前的兩區域聯絡線功率偏差波動范圍是±0.06dn,本文模型魯棒控制后的兩區域聯絡線功率偏差波動范圍是±0.06dn,下降幅度較為顯著。實驗證明:本文模型可有效魯棒控制含風電互聯電網負荷頻率,降低頻率偏差與聯絡線功率偏差。
利用連續系統性能指標衡量本文模型魯棒控制負荷頻率的魯棒性能,其值越小,說明本文模型的魯棒性能越佳,其閾值為0.55;利用兩區域積分平方誤差值,衡量本文模型負荷頻率魯棒控制精度,其值越小,說明本文模型魯棒控制精度越高,其閾值為0.3;在不同干擾及不同風電占比時,分析本文模型的連續系統性能指標與兩區域積分平方誤差值(ISE),分析結果如表2所示。
根據表2可知,不同干擾情況下,風電占比越高,連續系統性能指標的值均越高,ISE值也越高;各干擾情況下,本文模型魯棒控制含風電互聯電網負荷頻率的兩區域連續系統性能指標最大值,均未超過設定閾值,ISE值也均未超過設定閾值,說明本文模型具備較優的魯棒性能與魯棒控制精度,同時在不同干擾下,本文模型的魯棒控制性能與精度均較優,說明本文模型具備較優的動態特性,能夠較好地魯棒控制負荷頻率。
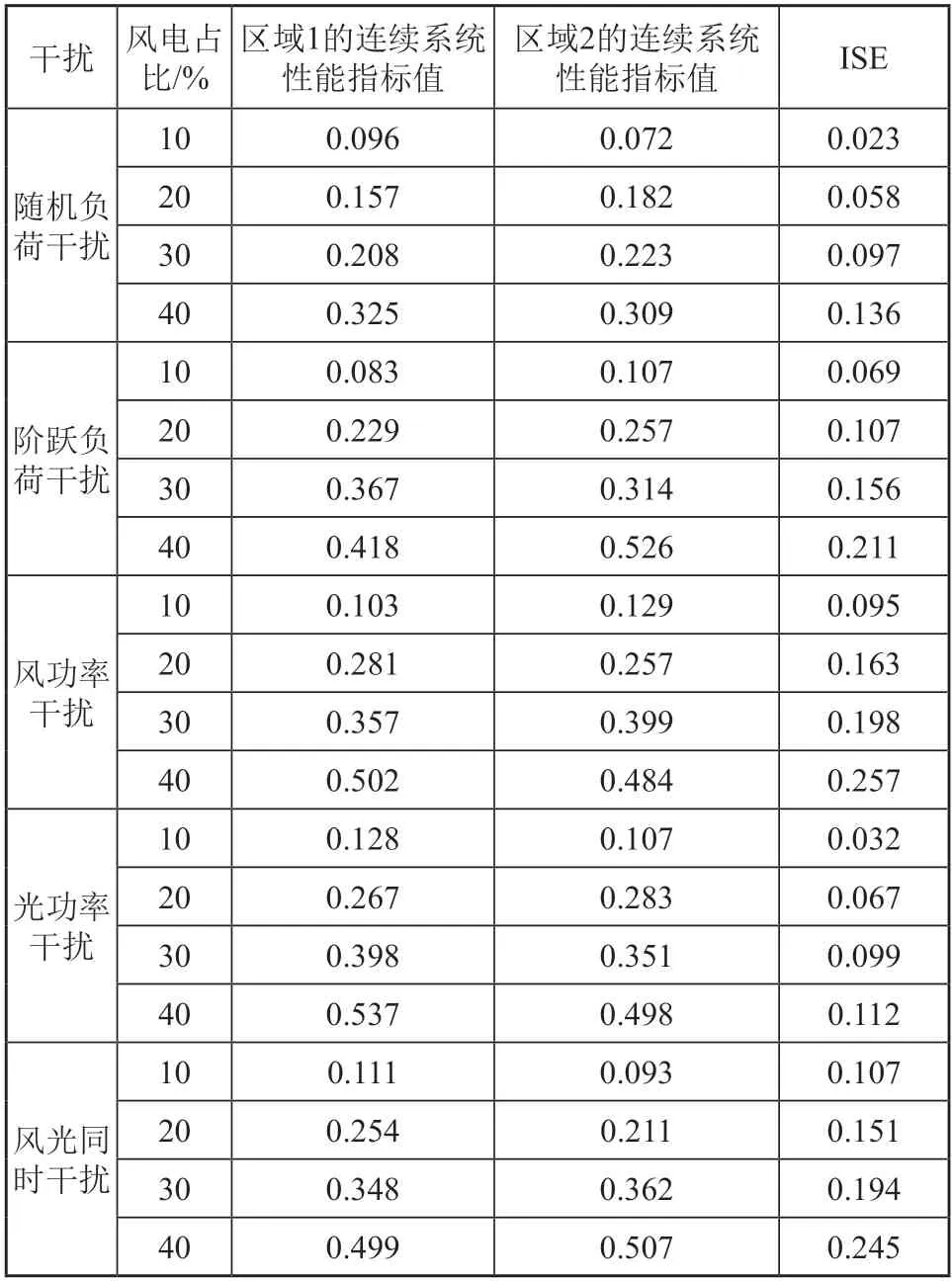
表2 本文模型魯棒性能的測試結果
3 結語
因為資源環境的限制,所以在電網內接入可再生能源的規模逐漸擴大,同時互聯電網的區域也隨之增加。可再生能源在電網內的大量接入,導致電網負荷頻率控制效果越來越差,為此需要研究智能的負荷頻率控制模型,降低可再生能源并網運行對電網造成的影響,為提升負荷頻率魯棒控制效果,利用二維云理論與果蠅算法,構建含風電互聯電網負荷頻率魯棒控制模型,降低頻率偏差與聯絡線功率偏差。實驗證明:本文模型具備較優的魯棒性能,且負荷頻率魯棒控制效果較優。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
核科學與工程(2015年4期)2015-09-26 11:59:03
電測與儀表(2015年5期)2015-04-09 11:30:52
