一種電子加速器輻照儲運系統(tǒng)傳動裝置設(shè)計
2022-06-28 17:46:56張志鋒王占文
制造業(yè)自動化 2022年6期
關(guān)鍵詞:優(yōu)化
張志鋒,王占文
(1.沈陽工業(yè)大學(xué),沈陽 110870;2.承德市可持續(xù)發(fā)展促進(jìn)服務(wù)中心,承德 067000)
0 引言
電子加速器輻照加工通過電子加速器將高能電子束發(fā)送在輻照目標(biāo)上,讓輻照目標(biāo)的物理性能與化學(xué)結(jié)構(gòu)出現(xiàn)變化[1,2]。高能電子束不會出現(xiàn)核廢料,目前輻照加工廠會用轉(zhuǎn)換靶,把高能電子束變換成X射線,變換后的射線具有較高的穿透力,也由此變成輻照加工領(lǐng)域的核心輻照源[3]。輻照儲運系統(tǒng)是輻照裝置的高放射區(qū)域非放射區(qū)的連接載體,因為輻照儲運系統(tǒng)的存在,工作人員不必親手操作輻照物品,不用擔(dān)心被輻射源照射,安全性得以保證[4]。
電子加速器輻照儲運系統(tǒng)的運行與其傳動裝置的控制狀態(tài)存在直接聯(lián)系,為保證電子加速器輻照儲運作業(yè)安全穩(wěn)定,本文對此進(jìn)行針對性研究,設(shè)計電子加速器輻照儲運系統(tǒng)傳動裝置,并通過基于模糊徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)優(yōu)化PID的傳動裝置控制模型,控制傳動裝置電動機(jī)按照期望速度運行,以期保證電子加速器輻照儲運系統(tǒng)穩(wěn)定完成輻照作業(yè)。
1 電子加速器輻照儲運系統(tǒng)傳動裝置
電子加速器輻照儲運系統(tǒng)傳動裝置主要使用在電子加速器輻照儲運控制系統(tǒng)中,為此,為了設(shè)計一個可以協(xié)調(diào)電子加速器輻照儲運工作的傳動裝置,本文在電子加速器輻照儲運控制系統(tǒng)設(shè)計電子加速器輻照儲運系統(tǒng)傳動裝置。電子加速器輻照儲運控制系統(tǒng)直接控制級是西門子公司研發(fā)的S7-226PLC,其與觸摸屏、傳動裝置都通過RS485接口連接。控制柜中觸摸屏屬于用戶可操作的交互界面,能夠提供輻照參數(shù)編輯、傳動參數(shù)編輯、輻照現(xiàn)場運行參數(shù)實時顯示等功能[5,6]。把輻照目標(biāo)工件的具體信息輸入觸摸屏,PLC根據(jù)相關(guān)標(biāo)準(zhǔn)執(zhí)行下述操作:
1)結(jié)合輻照目標(biāo)工件的具體尺寸信息,自主調(diào)節(jié)輻照目標(biāo)工件和掃描窗的距離;
2)按照輻照目標(biāo)工件的性質(zhì),通過PLC下達(dá)儲運指令至傳動裝置,傳動裝置使用基于模糊徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)優(yōu)化PID的傳動裝置控制模型,調(diào)節(jié)電動機(jī)轉(zhuǎn)速,實現(xiàn)電子加速器輻照工件按照標(biāo)準(zhǔn)速度,穩(wěn)定、安全儲運。
電子加速器輻照儲運控制系統(tǒng)結(jié)構(gòu)如圖1所示。
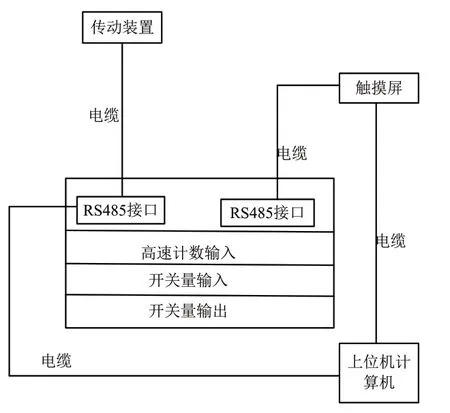
圖1 電子加速器輻照儲運控制系統(tǒng)
電子加速器輻照儲運控制系統(tǒng)的傳動裝置結(jié)構(gòu)如圖2所示。
圖2中,機(jī)械制動器、磁粉制動器與差動輪相連制動,差動輪主要包含輪b、f、c與轉(zhuǎn)臂K;輪A、B、B′、C屬于定軸輪系。輪的b軸設(shè)置了磁粉制動器、機(jī)械制動器。運行原理是:
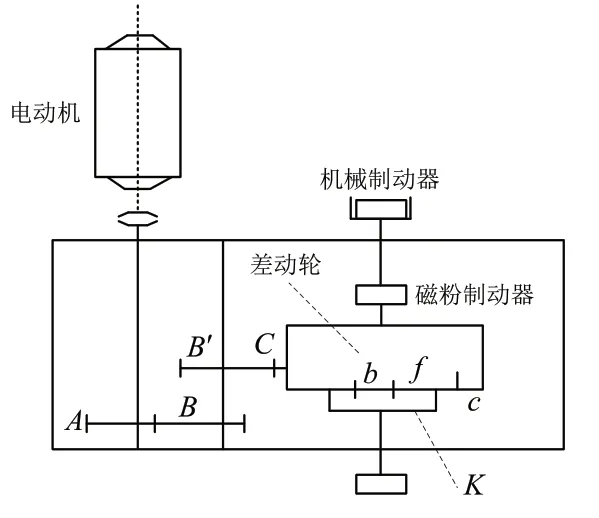
圖2 電子加速器輻照儲運控制系統(tǒng)的傳動裝置結(jié)構(gòu)
1)電動機(jī)在基于模糊徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)優(yōu)化PID的傳動裝置控制模型控制下,按照設(shè)定的標(biāo)準(zhǔn)儲運速度驅(qū)動,機(jī)械制動器、磁粉制動器在電動機(jī)的驅(qū)動下,互相協(xié)作控制差動輪穩(wěn)定運行,從而實現(xiàn)傳動裝置的穩(wěn)定工作。在輻照目標(biāo)工件正常儲運時,如果機(jī)械制動器不制動,磁粉制動器需要在無通電狀態(tài)下啟動電動機(jī),因通常情況下轉(zhuǎn)臂K的負(fù)載較大,所以需要保證其屬于固定不動狀態(tài),而輪b能夠空載運轉(zhuǎn)[7]。
2)電動機(jī)轉(zhuǎn)速滿足轉(zhuǎn)速的期望速度時,磁粉制動器便會出現(xiàn)制動力矩,制動力矩與傳動裝置的電流存在正向關(guān)系,會伴隨電流的變大而變大,但電流變大時,輪b轉(zhuǎn)速將變小,轉(zhuǎn)臂K的轉(zhuǎn)速會變大。以調(diào)節(jié)勵磁電流速率的形式,掌握電子加速器輻照儲運系統(tǒng)啟動時傳動裝置的加速度,如果輪b處于制動模式,電子加速器輻照儲運系統(tǒng)傳動裝置的轉(zhuǎn)速滿足運行標(biāo)準(zhǔn),便起動[8]。
3)傳動裝置起動后,以免磁粉制動器溫度功過高,導(dǎo)致制動功能失靈,需要啟動機(jī)械式制動器,輪b運行后,勵磁線圈需要保證無電狀態(tài)。
4)當(dāng)勵磁線圈里電流強(qiáng)度之間變小,輪b轉(zhuǎn)速逐漸提升,轉(zhuǎn)臂K轉(zhuǎn)速慢慢變小至0之后,電源停止運行,傳動停止,儲運停止。
2 基于模糊徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)優(yōu)化PID的控制模型
基于模糊徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)優(yōu)化PID的傳動裝置控制模型結(jié)構(gòu)如圖3所示。
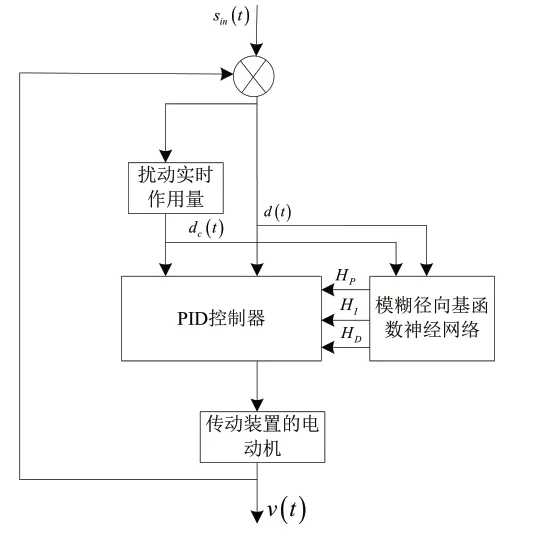
圖3 基于模糊徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)優(yōu)化PID的傳動裝置控制模型
傳動裝置的運行狀態(tài)與其電動機(jī)存在直接聯(lián)系,電動機(jī)可控制傳動裝置的傳動速度,為此,基于模糊徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)優(yōu)化PID的傳動裝置控制模型,主要是控制傳動裝置電動機(jī)的傳動速度,保證傳動速度與輻照目標(biāo)工件的儲運速度標(biāo)準(zhǔn)相符[9]。
在t時間段中,先結(jié)合傳動裝置傳動速度設(shè)定值Sin(t)與輸出值xout(t)運算誤差d(t)=Sin(t)-xout(t)與誤差變化率dc(t)=d(t)-d(t-1),使用PID控制器控制電動機(jī)時,主要通過模糊徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)運算PID控制器的控制參數(shù)HP(比例)、HI(積分)、HD(微分),PID控制器輸出控制信號v(t)控制傳動裝置電動機(jī),保證傳動裝置的運行不出現(xiàn)異常。
PID控制器的控制方法如式(1)所示:

其中,HP、HI、HD依次代表比例、積分、微分系數(shù);v(t-1)是t-1時間段傳動裝置電動機(jī)的控制信號;dc(t-1)是t-1時間段傳動裝置傳動速度的誤差變化率。
PID控制效果和HP、HI、HD存在直接聯(lián)系,在本文研究中,必須保證傳動裝置傳動速度誤差與誤差率2個變量的比例HP、積分HI、微分HD為最優(yōu)匹配,從而形成控制律,才可保證PID控制效果最佳。為此,本文使用圖4所示的模糊徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)整定PID控制器參數(shù)。
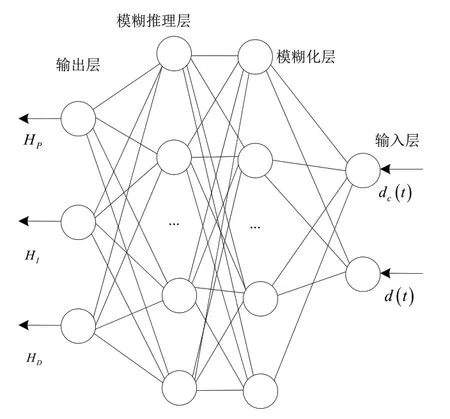
圖4 模糊徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)
圖4中,輸入層是傳動裝置傳動速度的誤差與誤差率d(t)、dc(t)2個變量,輸出層輸出變量是PID控制器的控制參數(shù)HP、HI、HD。將d(t)、dc(t)模糊化成D、DC,則模糊輸入D、Dc的論域、模糊語言值都處于-1~1區(qū)間內(nèi)。
1)輸入層
輸入層的輸入變量是d(t)、dc(t),此層每個節(jié)點直接和d(t)、dc(t)相連,把d(t)、dc(t)發(fā)送至模糊化層。輸入層的d(t)、dc(t)和輸出層的輸出之間關(guān)聯(lián)性g1如式(2)所示:

2)模糊化層
模糊化層使用高斯型函數(shù)生成隸屬函數(shù)g2(j,i),則如式(3)所示:

其中,模糊化層第j個輸入變量第i個模糊結(jié)合的隸屬函數(shù)均值、標(biāo)準(zhǔn)差依次是bji、cji;模糊化層第j個輸入變量是gj(t)=d1(t)+d1c(t)。
3)模糊推理層
此層和模糊化層相連后,通過模糊規(guī)則的匹配完成每個節(jié)點的模糊計算,則組合每個模糊節(jié)點能夠獲取對應(yīng)的傳動裝置的傳動速度[10~12]。
4)輸出層
結(jié)合模糊推理層推理的傳動速度,輸出層的輸出結(jié)果是PID控制器控制參數(shù)HP、HI、HD整定結(jié)果,則HP=g4(1),HI=g4(2),HD=g4(3):

其中,?(z,h)是輸出節(jié)點和前三層每個節(jié)點的連接權(quán)重。
綜上所述,增量式PID控制的控制量是:
因模糊徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)?(z,h)會影響其訓(xùn)練效果,參數(shù)設(shè)置不當(dāng)便會陷入局部最優(yōu)模式,將會導(dǎo)致PID控制器對傳動裝置電動機(jī)的控制效果較差[13]。為此,本文使用雙種群混沌鯨魚算法訓(xùn)練模糊徑向基函數(shù)神經(jīng)網(wǎng)絡(luò),在整體范圍中檢索?(z,h)最優(yōu)解,以免出現(xiàn)陷入局部最優(yōu)的問題,保證PID控制器實現(xiàn)傳動裝置電動機(jī)精準(zhǔn)控制。
鯨魚優(yōu)化算法主要分為獵物鎖定、獵物狩獵、掠奪食物三個環(huán)節(jié)。針對此算法來講,鯨魚種群里隨機(jī)一個鯨魚所在處均能夠描述成一種?(z,h)尋優(yōu)時的判斷因素。
鯨魚在狩獵的時候必須鎖定獵物,則:

其中,E是鯨魚狩獵過程,在本文中代表權(quán)重?(z,h)遍歷結(jié)果;B、O屬于系數(shù)矩陣;n是迭代次數(shù);Y*(n)、Y(n)分別是目前最佳的鯨魚位置與實際位置,最佳鯨魚位置即為最佳的權(quán)重?(z,h)值決策變量,實際鯨魚位置即為實際權(quán)重目前值。

其中,s1、s2是隨機(jī)數(shù),取值區(qū)間是0~1。β隨機(jī)數(shù)的取值區(qū)間是0~2。
因為鯨魚在捕食時,運行模式以螺旋模式為主,而電子加速器輻照儲運也屬于動態(tài)模式,為此,在使用模糊徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)優(yōu)化PID控制器參數(shù)時,存在動態(tài)性,那么權(quán)重?(z,h)的尋優(yōu)也存在動態(tài)性。所以,捕食行為數(shù)學(xué)模型如式(10)所示。

其中,EP、w依次是鯨魚在捕捉獵物的動態(tài)位置(權(quán)重?(z,h)的動態(tài)值)、取值區(qū)間是-1~1的隨機(jī)數(shù)。
掠奪食物時,需要在隨機(jī)鯨魚位置檢索獵物,數(shù)學(xué)模型如式(11)、式(12)所示:

其中,Yrad是獵物隨機(jī)位置向量。
在隨機(jī)鯨魚位置檢索獵物會導(dǎo)致算法收斂效率低下,所以本文引入混沌序列。混沌序列對?(z,h)的初值具有高度敏感性,能夠在固定區(qū)間內(nèi),結(jié)合自身規(guī)律,不停地遍歷全部鯨魚位置狀態(tài),則遍歷全部?(z,h)。如式(13)所示:

其中,如果隨機(jī)數(shù)η的數(shù)值是4,上式便處于混沌模式。混沌序列的引入可優(yōu)化算法對?(z,h)最優(yōu)值的檢索性能[14]。
混沌序列的使用可優(yōu)化算法收斂效率,為了防止尋優(yōu)過程中出現(xiàn)局部最優(yōu)問題,本文使用雙種群尋優(yōu)方案,把混沌初始化之后的種群隨機(jī)均分成2個種群θ1、θ2,θ1的個體使用常規(guī)鯨魚優(yōu)化算法實施?(z,h)尋優(yōu),θ2的個體在?(z,h)尋優(yōu)時,使用變異方案,保證算法尋優(yōu)時存在指引性。如果算法出現(xiàn)局部最優(yōu)問題,便實施跳變處理,保證?(z,h)不出現(xiàn)局部最優(yōu)值[15]。因為常規(guī)鯨魚優(yōu)化算法與引入變異環(huán)節(jié)的鯨魚優(yōu)化算法在處理新個體的模式中存在差異,所以結(jié)合兩者優(yōu)勢之后,使用混沌序列將種群實施初始化,優(yōu)化后的算法即為雙種群混合鯨魚優(yōu)化算法。變異方法如式(14)所示:

雙種群混合鯨魚優(yōu)化算法的具體操作流程是:
第1步:使用混沌序列將鯨魚優(yōu)化算法種群實施初始化處理,隨機(jī)建立2組規(guī)模是的權(quán)重初始種群。
第2步:依次運算權(quán)重種群θ1、θ2的各個個體適應(yīng)度函數(shù)值。
第3步:如果目前迭代次數(shù)為最大值,進(jìn)入第7步,反之進(jìn)入第4步。
第4步:種群θ1使用雙種群混合鯨魚優(yōu)化算法的尋優(yōu)規(guī)則更新粒子,種群θ1使用鯨魚優(yōu)化算法更新粒子,運算粒子更新后適應(yīng)度值,留下最佳?(z,h)個體。
第5步:此步驟屬于選擇處理,使用n個部分隨機(jī)的新個體取代θ1里適應(yīng)度函數(shù)值最小的n個權(quán)重個體。
第6步:此步驟屬于變異處理,通過式(14)變化種群θ1里某些權(quán)重個體特性,將變異后權(quán)重個體實施邊界處理。
第7步:對比種群θ1、θ2的最佳權(quán)重個體,選取適應(yīng)度函數(shù)值最大的權(quán)重個體,輸出最后的權(quán)重尋優(yōu)結(jié)果,則輸出?(z,h)最優(yōu)設(shè)定值。
3 實驗分析
為測試本文裝置的應(yīng)用效果,在MATLAB平臺中,將本文裝置設(shè)計在電子加速器輻照儲運控制系統(tǒng)中,電子加速器輻照儲運控制系統(tǒng)的操作界面如圖5所示。點擊電機(jī)傳動參數(shù)編輯按鈕,設(shè)置電子加速器輻照儲運時電動機(jī)期望轉(zhuǎn)速是3000r/min,反電動勢系數(shù)是0.068V/(rad/s),電子加速器輻照儲運時,在額定磁通下,傳動裝置的電動機(jī)不能超過額定轉(zhuǎn)速,以此才可以保證傳動裝置穩(wěn)定運行,電子加速器輻照儲運才可以按照設(shè)置速度進(jìn)行儲運。測試本文裝置使用前后,電子加速器輻照儲運控制系統(tǒng)的儲運出錯情況,主要通過電子加速器輻照儲運控制系統(tǒng)-輻照現(xiàn)場運行參數(shù)實時顯示界面顯示,結(jié)果如圖6、圖7所示。
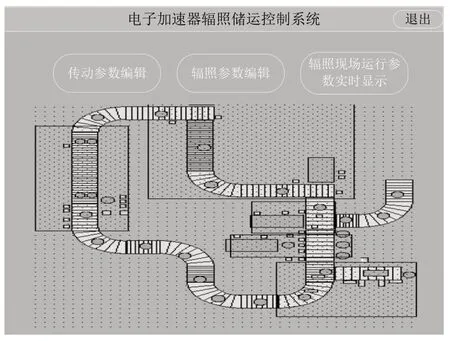
圖5 電子加速器輻照儲運控制系統(tǒng)的操作界面
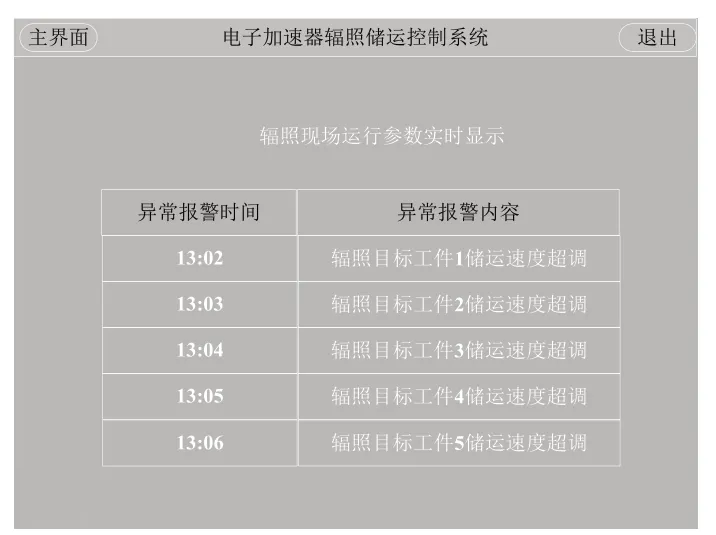
圖6 使用前儲運出錯情況
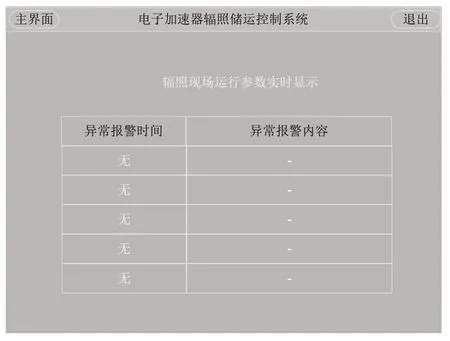
圖7 使用后儲運出錯情況
如圖6、圖7所示,本文裝置使用前,13:02~13:06之間電子加速器輻照儲運速度超調(diào)5次,本文裝置使用后,13:02~13:06之間電子加速器輻照儲運速度超調(diào)0次,本文裝置可以控制電子加速器輻照儲運速度不出現(xiàn)超調(diào)情況。
測試本文裝置在使用基于模糊徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)優(yōu)化PID的傳動裝置控制模型前后,電子加速器輻照儲運系統(tǒng)的傳動裝置轉(zhuǎn)速變化如圖8所示。
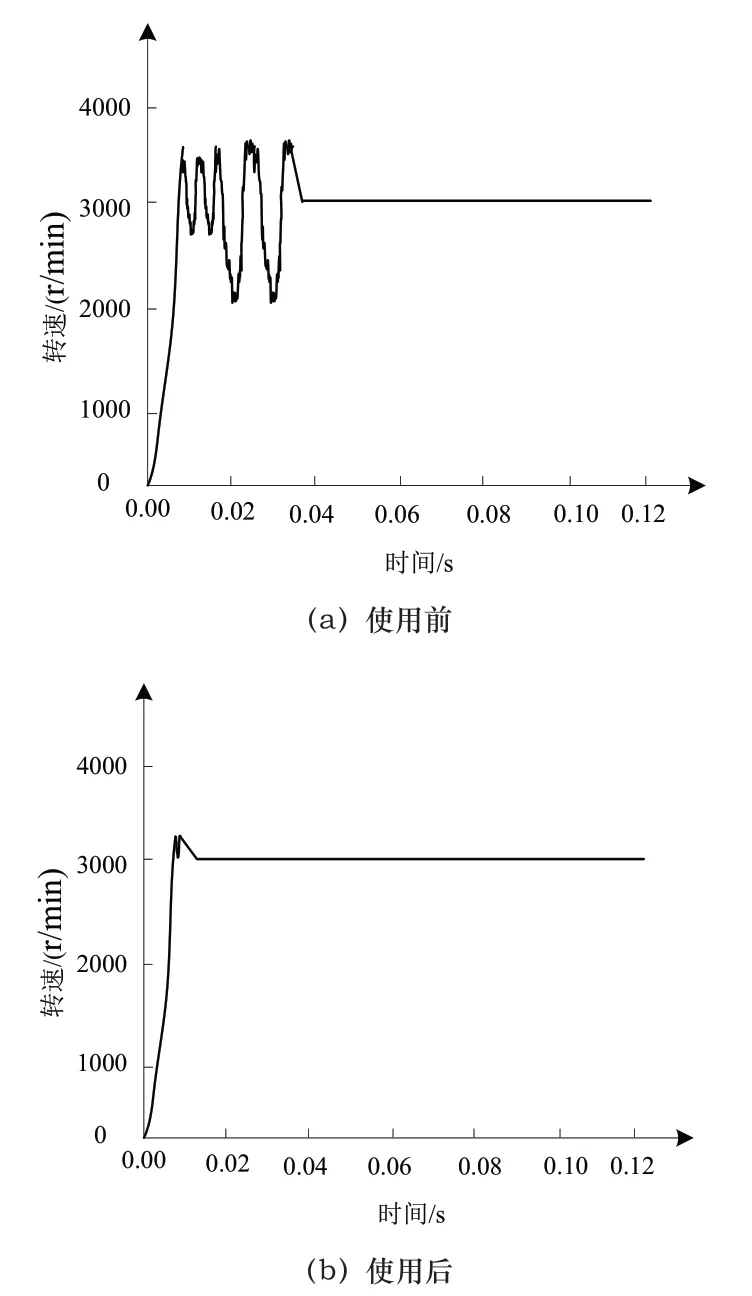
圖8 傳動裝置電動機(jī)的速度
如圖8所示,本文裝置使用基于模糊徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)優(yōu)化PID的傳動裝置控制模型前后,電子加速器輻照儲運系統(tǒng)的速度存在明顯差異,使用前電子加速器輻照儲運系統(tǒng)運行時,傳動裝置轉(zhuǎn)速在0.035s之后才穩(wěn)定在3000r/min,且0.035s之前,傳動裝置轉(zhuǎn)速出現(xiàn)超調(diào)量,且波動明顯,使用后,傳動裝置轉(zhuǎn)速在0.015s時,快速穩(wěn)定在3000r/min,靜態(tài)性能較好。
4 結(jié)語
本文設(shè)計一種電子加速器輻照儲運系統(tǒng)傳動裝置,此裝置主要應(yīng)用在電子加速器輻照儲運控制系統(tǒng)中,為了充分發(fā)揮電子加速器輻照儲運系統(tǒng)傳動裝置的作用性,本文使用了基于模糊徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)優(yōu)化PID的傳動裝置控制模型,控制傳動裝置在最優(yōu)控制律引導(dǎo)下,按照設(shè)定的標(biāo)準(zhǔn)儲運速度驅(qū)動,保證電子加速器輻照儲運速度不出現(xiàn)超調(diào)情況,且在實驗中,本文裝置的應(yīng)用價值得以驗證,可以控制電子加速器輻照儲運速度不出現(xiàn)超調(diào)情況。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
