面向復雜機械零件形貌測量的高精度三維重建方法
2022-07-01 10:42:53韓笑么瑞軒
裝備維修技術 2022年7期
韓笑 么瑞軒
摘? 要:通常,機械零件的測量應滿足高精度和高效率的要求,并且由于表面光滑、紋理不完整和結構復雜,機械零件的測量更具挑戰性。若要取得非常精確的對應結果,請使用絕對置換對應,首先是對影像進行極座標校正,然后使用以點為基礎的對應方法,將影像的左右立體聲化。因此建議采取相應的方法以提高相位曲線的質量,并在相位提取和立體匹配過程中提高重建的零件云的精度。基于此,本篇文章對面向復雜機械零件形貌測量的高精度三維重建方法進行研究,以供參考。
關鍵詞:復雜機械零件;形貌測量;高精度;三維重建方法
1三維重建相關概述
三維重建(3Dreconstruction)是一個過程,用于創建真實場景的曲面形狀,廣泛用于運輸、工業、國防和其他行業。常用的三維重建方法通過將活動編碼的圖案投影到被測場景上來實現被測場景的高密度三維重建。由于編碼模型具有活動的投影特性,因此此方法也稱為“結構光三維測量方法”。與紅外編碼和顏色編碼方法相比,基于藍邊投影的結構化光三維測量方法具有高測量精度和高測量精度的優點,對被測對象的環境光線和表面反射特性等外部因素不敏感,因此適用由于結構化光源的三維測量方法本質上是一種光學三維測量方法,限制了測量區域和被測零件的自發光效果,因此只能從一個角度測量被測對象表面的局部三維形狀信息。若要取得零件表面的完整3D形狀資訊,您必須變更度量零件的不同透視(也稱為3D掃描),并將局部3D度量資訊注冊到統一的世界座標系統中。此過程的關鍵在于精確恢復每個測量視圖在世界坐標系中的狀態。研究人員通過提高連續配準精度和三維掃描結構中的三維輕量化設備的全局優化來消除累積誤差。
2實驗及結果分析
本文的實驗對象是FSW逆變器,圖1顯示了該部分的前視圖和后視圖。零件表面結構復雜,輪廓變化劇烈,銅、硬區域多,頂部有許多波紋,是復雜的機械零件之一。在測試過程中,會將頻率為70、64和59的條紋圖案投影到零件表面,每個圖案共有4條條紋,共12條條紋。提取零件表面的調制邊圖像后,將使用相位轉移方法分析圖像以獲得壓縮相位圖。然后用多頻外推法將相位展開70頻率,得到絕對相位圖。在實驗中,您可以使用不同的步驟校正方法或步驟對應方法。
2.1逐區域相位校正方法實驗結果及分析
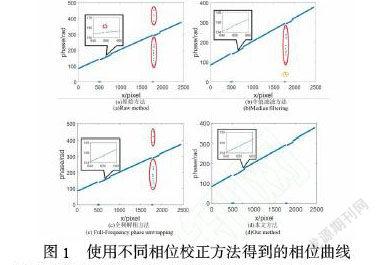
為了了解逐步校正方法的效果,本文將使用中值濾波和全強度去噪方法進行比較,結果如圖2所示。圖2(a)是原始的相位圖,并且在遠離相位曲線的地方有紅色圓圈和紅色刻度線標記的跳線。圖2 b使用中值濾波方法;圖2 c使用全強度去噪方法;圖2(d)使用了本文檔中建議的區域特定的增量修復方法。為了進行比較,可以看到中間值濾波方法可以消除跳變誤差和一些雜色,但它會產生新的雜色,如圖2(b)中的黃色圓圈所示。「實色去底色」方法可以消除潛變,但不能移除遠離曲線的雜點。本文首先根據公式去除跳變誤差,然后用區域相關相位校正方法去除遠離相位曲線的噪聲點。測試表明,這種方法可以消除與相位曲線相距很遠的跳線誤差和雜色,如圖2(d)所示。
2.2結合曲線擬合的相位匹配方法實驗結果及分析
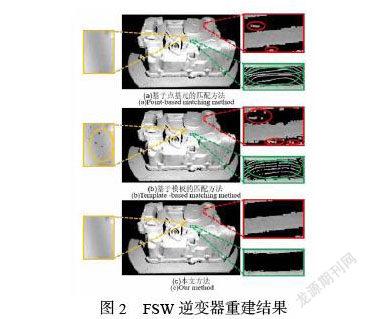
利用基于點基的等價方法、基于模型的等價方法和該方法對FSW逆變器進行重構,并對重構后的點云進行比較分析,如圖3所示。為了更好地比較這三種方法在重建復雜零件時的優缺點,增加了噪聲點和空洞的暴露區域,例如波紋的邊界區域、特定弧度的平面區域和僅使用一臺相機拍攝的波紋的邊界區域。它們的鋸齒狀邊界區域以紅色矩形框表示;具有特定半徑的平面區域以黃色矩形方塊表示;只有從一個相機拍攝的鋸齒波的邊界區域以綠色方框表示。
在綠色矩形盒中標記的大部分區域在拍攝過程中只使用一臺相機拍攝,同時它位于具有較小半徑且每個像素的變化幅度較小的雕刻的頂部和底部相交處。因此,在此行業中,很容易導致不兼容,從而導致重建結果出現一系列雜色。由于這種不兼容很難在立體匹配階段消除,因此基于點序列的匹配方法和基于模型的匹配方法都具有上述噪聲點簇,如圖3 a和圖3(b)所示的綠色橢圓。此文件中的方法會根據每個像素與鄰近像素之間的平均距離來精細地對應差異,以有效地移除此類沖突點,如圖3(c)所示。為了更好地證明該算法的有效性,將三種方法重建的點云與標準零件模型進行了比較,并計算了平均分布。
3研究展望
在機械零件的三維重建中,不僅要考慮重建方法的精度,還要考慮行業的實時要求。本文中機械零件的三維模型可以很好地利用結構化輕量化的三維重建技術進行重建,但還存在一些不足,今后的改進和完善可著重于以下幾個方面:(1)這里然后,諸如ZSD、SGBM和AD等算法在望遠鏡陣列中可以保持左右相機的互易性,以獲得更精確的平行圖像并改進點云。(2)多頻非均勻三維重建中的相位精度直接影響點云重建精度。在結構化的光機中,存在非線性的反問題,導致了預測的藍色邊的非藍色變化,從而導致了四步偏移中的相位誤差,并影響了點云的重建精度。結構性光學儀器的非線性誤差主要是伽瑪變換引起的。在跟蹤研究中,可以執行光學機器或灰度系數校正的非線性反校正,以使邊緣圖像更接近理想的藍色條紋,并提高點云的重建精度。(3)本文件使用四個階段轉換和三個階段的異質結來計算階段,因此左右相機必須從測量的目標收集12個圖面影像,而過多的影像則無法促進機械零件的即時重建。今后,我們將探索深度學習技術和變量方法的組合,以減少投影模型的數量,并實現實時的三維重建,以確保階段的準確性。
結束語
機械零件是復雜機械設備的重要組成部分。軸的數字模型重建為機械制造和裝配奠定了基礎,提高了裝配效率和自動化水平,在工業生產中非常重要。為了提高后續識別工作的搜索效率,建立了Kd樹的數據結構,并利用最優鄰域實現了基于特征描述的聚類識別算法。分割后,每個屬性點云都可以使用基本庫模板識別和檢索,然后將屬性匹配到組件庫中以確定組件的幾何屬性和結構組成。最后,研究了基于無抽樣一致性算法的點云模型參數化問題。為計算模型的軸和半徑、沿軸投影點云以及計算模型高度等參數安裝曲面。此時,將定義零件的模型類型、結構特性和模型參數。重建系統從一個角度收集零件信息,從而克服了Kinect傳感器采集精度低和數據不完整的問題,滿足了軸重建的要求,重建了完整的三維模型。
參考文獻:
[1]韓瑞路.航空發動機葉片類零件三維重建與缺陷檢測關鍵技術研究[D].北方工業大學,2020.000148.
