基于多普勒耦合估計的彈道目標測距方法
2022-07-01 08:01:40于秋野徐錦程唐勻龍
雷達科學與技術 2022年3期
于秋野, 徐錦程, 何 睿, 唐勻龍
(1. 中國電子科技集團公司第三十八研究所, 安徽合肥230088; 2. 中國人民解放軍32035部隊, 陜西西安710600; 3. 中國人民解放軍戰略支援部隊航天系統部裝備部裝備項目管理中心, 北京 100193)
0 引言
反導預警與空間監視雷達為了能夠同時具有長時寬和大帶寬,一般采用脈沖壓縮體制。脈沖壓縮在匹配濾波時會產生與多普勒頻移成正比的附加延時,即距離多普勒耦合現象。距離多普勒耦合現象對信號脈壓、脈沖積累、距離檢測及寬帶回波開窗有較大影響,有效處理耦合帶來的誤差對于提升雷達高精度測距具有重要意義。
距離多普勒耦合的修正量由雷達工作參數(脈寬、頻率、帶寬)及目標徑向速度計算得到,其中雷達工作參數為系統輸入量。因此,有效處理距離多普勒耦合的核心是目標的徑向速度估計。目標徑向速度則需要通過測速波形測量獲取或目標濾波估計。專用測速波形需要額外占用雷達的時間資源,且存在測速誤差和誤關聯;而航跡濾波速度僅依賴距離探測精度及濾波模型的精確建模。綜合考慮處理效果和工程應用,航跡濾波估計徑向速度具有較好的測距精度和相關穩定性,是解決該問題的最優選擇。
距離多普勒耦合的修正一般在脈沖壓縮前進行,修正殘差會傳遞到航跡濾波器下一幀的量測距離中。如果對量測距離進行反修,并在航跡輸出前利用當前濾波速度再次修正,能夠防止誤差傳遞,但影響濾波效果;且在波形切換時反修后的量測距離會發生跳變,會導致濾波器速度估計異常及無法關聯。
文獻[10]提出通過信號脈壓前的相位修正及脈沖積累前的延時修正來消除距離多普勒耦合對脈壓和相參積累的影響,但是其修正效果依賴于速度估計的準確性,也存在耦合修正殘差傳遞的情況。文獻[11]提出在極坐標系中進行濾波并修正距離多普勒耦合,但極坐標系無法正確建模高機動目標的運動模型,其處理一般只能針對勻速目標。
針對上述問題,本文對彈道目標的高精度距離測量進行了深入研究:首先分析了距離多普勒耦合的影響;對典型的彈道目標觀測模型和運動模型進行建模;提出了一種針對彈道目標的精確測距方法;通過仿真實驗對該方法進行對比驗證。實驗結果表明該方法對于處理機動目標距離多普勒耦合有較好的效果,這對于提升雷達的整體性能具有重要意義。
1 距離多普勒耦合的影響
對于脈沖壓縮雷達,當目標存在徑向運動時,就會發生多普勒失配現象,即匹配濾波器輸出的回波峰值位置會產生與多普勒頻移成比例的偏差。對于脈沖寬度為,載頻為,帶寬為的矩形脈沖,目標徑向運動引起的距離耦合誤差為

(1)
定義耦合系數為
(2)
耦合系數的符號由線性調頻信號的調頻斜率決定,當斜率為正時,耦合系數為正,反之為負。不同頻率、波形參數下的耦合系數及耦合誤差見表1。可以得到,當雷達工作頻段高且脈寬大時,耦合誤差會對距離測量產生較大影響,此時徑向速度的精度將直接關系到雷達測距的精度。
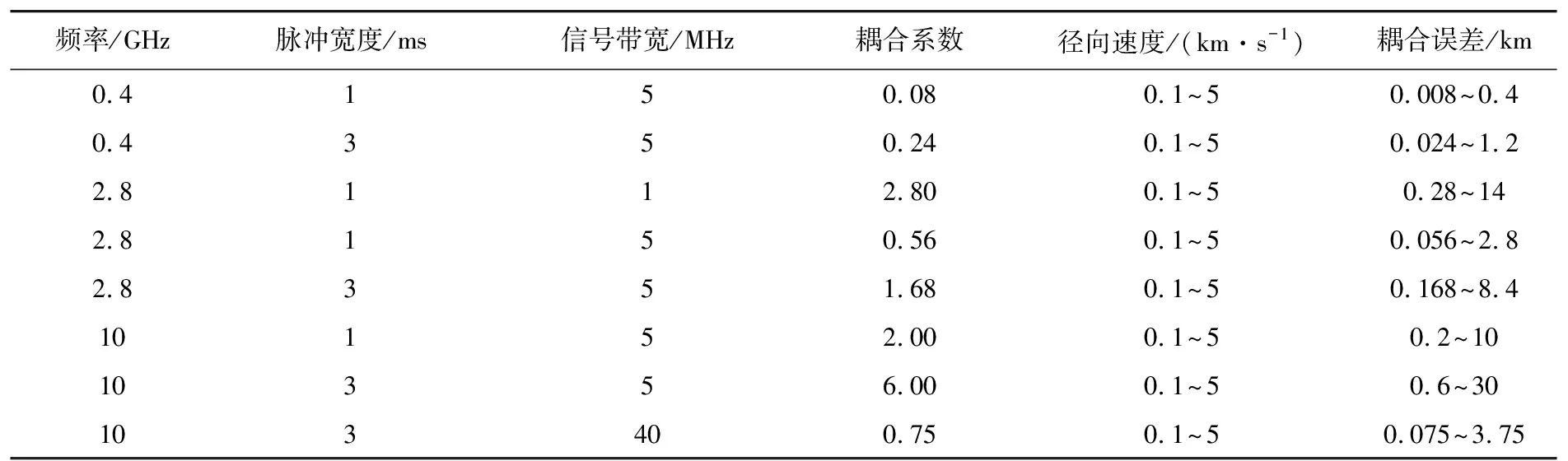
表1 工作參數與耦合誤差對應關系
2 雷達跟蹤建模2.1 雷達量測模型
雷達觀測數據包括距離,方位,仰角,其坐標系為以陣面為中心的極坐標系。
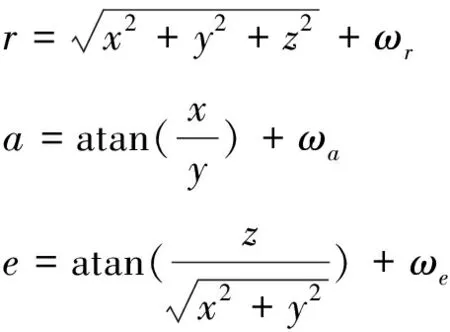
(3)
式中,[,,]為地面直角坐標系下的坐標,,,為量測噪聲,其中ω包括信號處理對距離多普勒耦合修正的殘差。
2.2 目標運動模型
典型彈道目標飛行過程,包括主動段、自由段及再入段。目標在主動段受力包括發動機推力、重力、空氣阻力及地球自轉產生的離心力等。假定目標狀態為[x y z vvv],在地心地固坐標系下對彈道目標建立運動模型,則目標在主動段的運動模型為
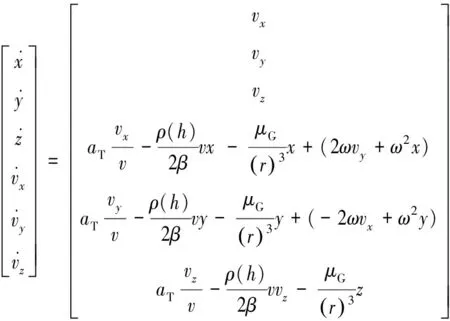
(4)

3 高精度測距算法設計3.1 算法流程設計
距離多普勒耦合處理的難點在于:利用濾波器預測速度進行耦合修正時,殘差會傳遞到下一幀的量測數據中。當耦合系數大于一定范圍時,誤差會隨著迭代次數的增長不斷放大。
解決殘差傳遞的關鍵是增加解耦所需的測速旁路進行速度估計。測速旁路采用獨立的濾波器對目標速度進行濾波,測速濾波器采用Singer算法,能夠有效處理彈道目標等高機動目標。該方法的主要步驟為:

'=-|-1
(5)
第二步,徑向速度及加速度估計。將未解耦量測距離′輸入測速濾波器,濾波器的運動模型見公式(8)濾波后得到的濾波值′包含徑向速度濾波值′及徑向加速度濾波值′。
第三步,耦合修正。利用第一步中的′及第二步中的′及′按公式(6)對未解耦的距離測量′進行修正,得到修正后的距離測量″。將″替換′中的′得到彈道濾波器的觀測輸入″。
″='+('+')
(6)
第四步,彈道濾波。將解耦后的″輸入測速濾波器,濾波器中目標運動模型見公式(4)。濾波后得到的當前濾波值,進行狀態估計后,得到目標預測狀態及彈道面阻比。根據公式(7)計算預測徑向速度+1|用于下一幀信號處理修正距離多普勒耦合。

(7)
在算法的第三步中,′及′是利用未解耦的距離量測計算的,因此修正殘差不會傳遞到下一輪修正中。距離多普勒耦合處理整體流程圖如圖1所示。下面對算法中第二步和第四步進行詳細論述。
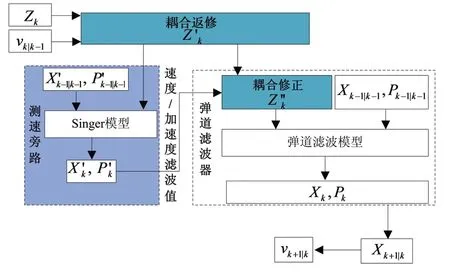
圖1 距離多普勒耦合處理流程圖
3.2 徑向速度及加速度估計
算法的第一步完成了返修已解耦距離測量,此時利用得到的未解耦量測距直接估計目標的徑向速度和加速度。通常高機動目標一般處于變加速狀態,因此測速旁路采用Singer算法對目標徑向速度及加速度進行估計。

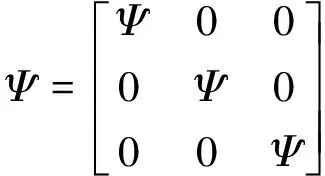
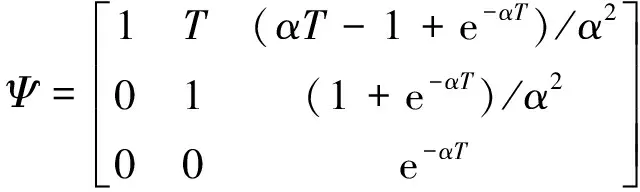
(8)
對方程離散化,并考慮地球引力后得到
+1=++
(9)
(10)
(11)
式中:()為過程噪聲,為機動時間常數的倒數,為Singer模型的過程;考慮重力對彈道目標的固定作用,=[0 0 0 0 0 0 0 0 -1]′為控制項矩陣;為重力加速度常量。
3.3 彈道濾波
算法的第三步完成距離測量耦合修正后,采用IMM-UKF濾波器進行彈道濾波。結合彈道目標運動非線性的特點,我們采用不敏卡爾曼濾波(UKF),并結合能動態切換彈道飛行階段的交互多模型(IMM)作為彈道濾波器。

目標狀態預測為
(12)
-1=(-1,-1)
(13)
目標預測協方差矩陣為
(14)
更新量測為

(15)
-1=(-1,)
(16)
彈道目標全階段跟蹤本質上是一個混合過程估計問題,如采用多種運動模型就能夠對全彈道運動過程合理建模。
因此,采用的IMM算法將其中所有濾波器的估計結果的加權平均,權重由各濾波器的模型概率決定,其中目標運動階段的模型概率可以正確地反映目標飛行的階段,算法流程如圖2所示。
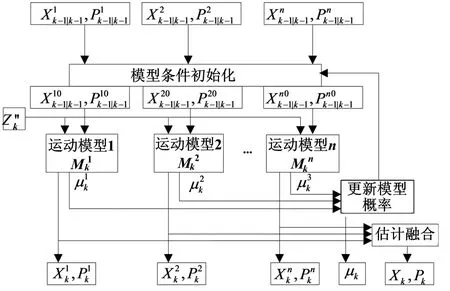
圖2 IMM算法結構圖
4 仿真分析
仿真實驗對彈道目標全彈道進行仿真,彈道運動模型見2.2節。雷達位于距導彈發點100 km,能夠觀測導彈主動段加速到再入的全過程。仿真雷達量測數據包含偽隨機高斯噪聲,噪聲最大值為3。具體仿真參數如表2所示。
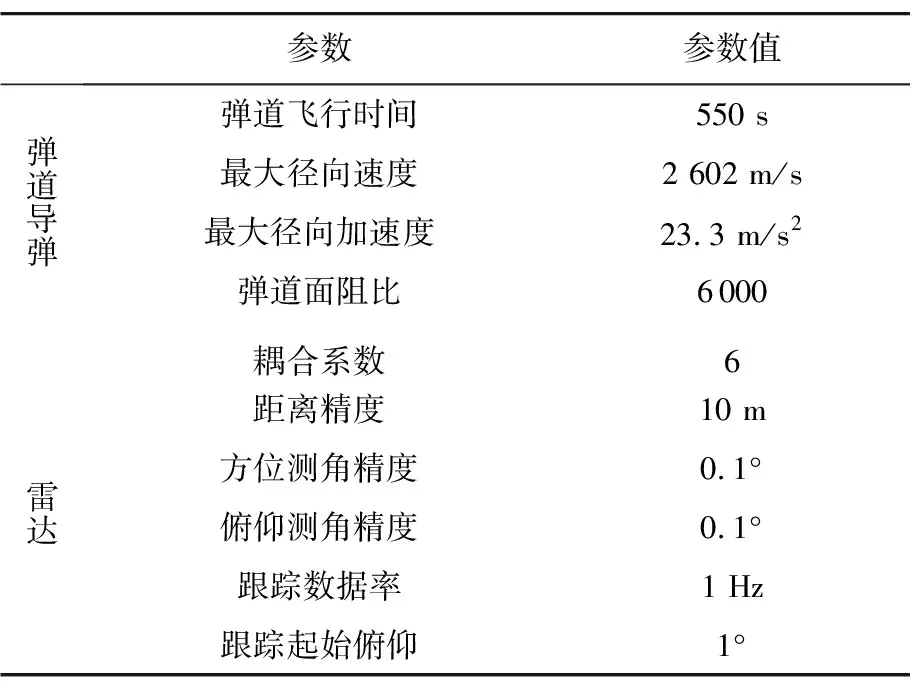
表2 仿真場景參數設置
目標徑向速度及徑向加速度變化曲線如圖3所示。
實驗中采用蒙特卡羅仿真(獨立運行200次)進行仿真,并與傳統的單路處理方法對比。單路處理與測速旁路方法對于彈道濾波采用相同的IMM濾波器,其全彈道殘差修正效果比對如圖4(a)所示。為了驗證加速度補償的效果,修改測速旁路方法不對加速度進行修正,其修正對比效果如圖4(b)所示。
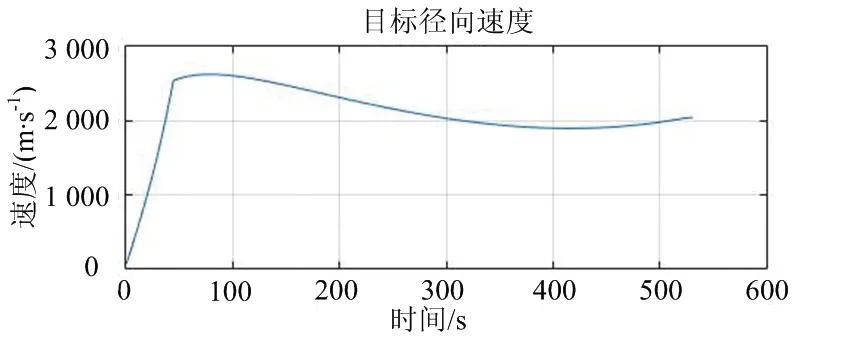
(a) 全彈道時間-徑向速度
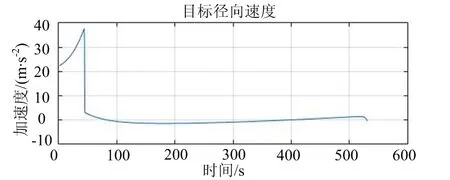
(b) 全彈道時間-徑向加速度圖3 目標徑向速度及徑向加速度
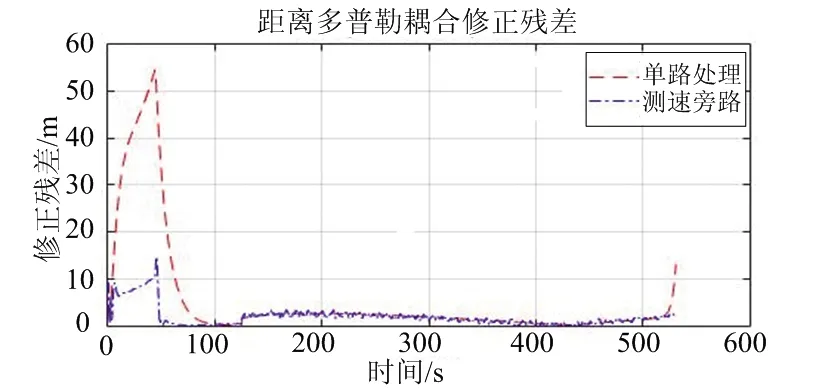
(a) 單路處理與測速旁路對比
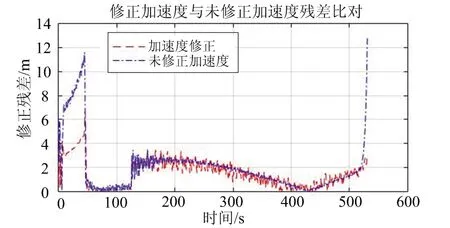
(b) 加速度修正與加速度未修正對比圖4 距離多普勒耦合修正殘差比對
對獨立運行的所有仿真結果進行殘差(無符號)均值及殘差均方根統計,統計結果如表3所示。
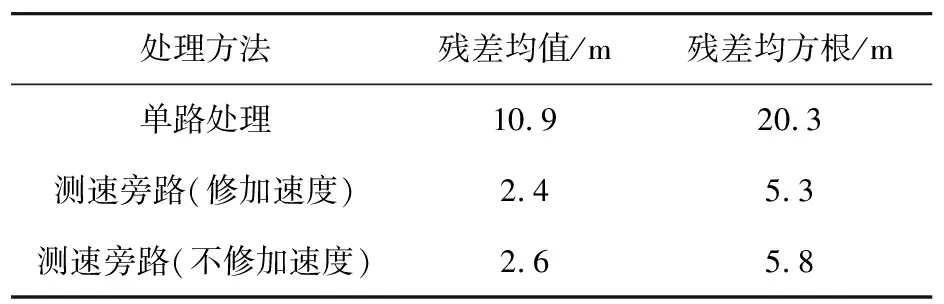
表3 修正殘差均值與均方根對比
通過仿真結果可以得出:測速旁路對彈道目標的距離多普勒耦合修正精度相較于單路處理有著較大提升;特別地,在主動段及再入段等加速度變化較大的飛行階段,修正加速度能夠進一步提升距離估計的精度。
5 結束語
多普勒耦合的處理對目標跟蹤、目標關聯、目標檢測都具有重要影響,有效處理該問題是能否發揮雷達效能的前提。本文提出了基于多普勒耦合估計的彈道目標高精度測距方法,該方法具有以下優勢:
1) 針對傳統方法會導致距離多普勒耦合修正殘差傳遞的問題,文中方法添加了測速旁路,能夠消除當前幀修正殘差對下一幀的影響。
2) 傳統方法采用濾波器上一幀預測的速度修正當前幀的耦合,會引入一定誤差。文中方法利用當前幀估計目標當前的徑向速度和加速度,提高了耦合修正的精度。
3) 相較于傳統方法只利用徑向速度進行修正,文中的處理方法在修正距離多普勒耦合時,考慮徑向加速度因素,進一步提高了修正精度。
仿真分析中對彈道目標全彈道數據進行跟蹤處理,對比了傳統的單路處理與測速旁路的修正殘差,并且驗證了采用加速度修正對算法具有增量得益,特別是目標處于機動段時,實驗結果顯示本文方法相比于傳統方法具有更高精度的距離估計。今后的工作重點在于考慮該方法在群目標跟蹤下的應用,特別是對群目標跟蹤關聯穩定性的提升。