基于OEDR和ODC的自動駕駛汽車實際道路測試評價技術研究*
2022-07-02 09:44:54李志軍張琳琳陳振宇李世龍
汽車工程 2022年6期
關鍵詞:評價
孫 航,李志軍,張琳琳,陳振宇,李世龍
(1.天津大學機械工程學院,天津 300072;2.中國汽車技術研究中心有限公司標準化研究所,天津 300300)
前言
自動駕駛是人工智能與汽車深度融合的技術領域,汽車自動駕駛技術的發展過程是駕駛員駕駛操作逐漸退出的過程。自動駕駛汽車(automated driving vehicles,ADV)在我國的大規模應用勢在必行,預計到2030 年,我國L4~L5 級自動駕駛新車裝配率達到10%。隨著發展進程的深入,駕駛員負責的“感知-決策-執行”等駕駛任務將逐漸由車輛系統替代,以指標符合性評價為核心的傳統方法將不再適用于自動駕駛,而是需要面向自動駕駛特有的“智能化”屬性,通過高綜合性和高復雜度的場景來評價其在真實道路交通環境下的表現。因此,實際道路測試評價技術是驗證ADV 安全和效率的必要手段,對自動駕駛技術的迭代和商業化具有至關重要的作用。
1 自動駕駛汽車測試評價技術現狀
目前,聯合國WP.29 框架下形成的“多支柱法”是被廣泛接受的自動駕駛汽車測試原則,即通過仿真、封閉場地和實際道路等維度,測試ADV 在各種交通情況下的綜合表現。
仿真測試用于驗證自動駕駛系統在全場景和極端情況下的功能和性能,具有周期短、成本低、效率高等優點,但存在難以將真實因素(環境和車輛)完全映射到虛擬世界中的缺陷。封閉場地測試具有場景典型性和可復現性的特征,國內外封閉測試場地和測試技術不斷優化,封閉場地的測試在一定程度上反映自動駕駛車輛的功能和性能表現,但由于測試場景的局限性,封閉場地測試仍然無法完全代表自動駕駛車輛在復雜和隨機的真實交通流中的實際表現。
相比于仿真和場地測試,實際道路測試方法目前仍處于初步探索階段。自動駕駛實際道路測試利用實際道路上各種目標和事件的隨機化特征,可驗證自動駕駛車輛:
(1)在實際道路上運行時本車及對周邊交通環境的安全性影響;
(2)對各類典型目標和隨機動態事件的響應是否符合預期;
(3)對整體道路交通通行效率的影響。
因此,實際道路測試是自動駕駛汽車測試及評價過程中不可或缺的環節。2017 年以來,主要汽車產業國家都開展了自動駕駛實際道路測試的探索。2018-2019 年,美國加州有36 家公司完成了563.5萬km 的公共道路自動駕駛測試。德國、英國、芬蘭、日本等國的汽車企業也都在本國自動駕駛相關法律法規框架下開展了大量的實際道路測試。截至2021 年10 月,我國各地已開放3 200 多km 測試道路,發放700 余張測試牌照,道路測試總里程超過530 萬km,上海和北京等地相繼開展了載人載物示范應用。
然而,當前國際上開展的實際道路測試普遍以改進單一車型技術方案為目的,由于自動駕駛研發技術的多樣性,導致研發測試方案針對性強、測試指標與研發技術方案關聯性大,此類測試評價方案不具備典型性和普適性的標準化特征。本文中提出了標準化的ADV 實際道路測試評價技術方案,主要貢獻如下:
(1)提出了一種測試備選道路評估方法,該方法基于自動駕駛目標和事件探測與響應(object and event detection and response,OEDR)對實際道路進行分類,構建了基于ADV 的設計運行范圍的實際道路測試元素基礎模型。
(2)提出了基于ADV 設計運行條件的邊界閾值實際道路測試技術和基于乘員感受的主觀評價方法,確定了ADV主客觀結合的測試評價體系。
(3)選取我國實際道路,開展ADV 實際道路標準化測試評價技術的驗證試驗,試驗表明本文中提出的ADV 實際道路標準化測試評價技術的科學性和普遍適用性。
2 ADV實際道路測試評價工程框架
在實際道路開展ADV 測試評價有兩項關鍵需求:一是開展測試的實際道路應滿足被測ADV 的設計運行范圍(operational design domain,ODD)且道路包含的元素能夠盡可能多地測試ADV 執行動態駕駛任務(dynamic driving task,DDT)的表現;二是使用的測試評價方法應能夠與ADV 的設計運行條件(operational design condition,ODC)需求匹配,能夠充分、全面地測試自動駕駛功能和性能。本文中基于關鍵需求提出實際道路測試評價體系工程框架,如圖1所示。

圖1 ADV實際道路測試評價工程框架
在ADV 測試備選道路評估階段,首先在本文提出的實際測試道路類型集中選出符合被測ADV 設計運行條件的測試道路類型,隨后計算備選測試道路包含的測試元素與所屬道路類型的基礎元素模型的有效相似度,根據基礎元素模型評估備選道路是否滿足測試要求,如果滿足,進入測試評價階段。在ADV 實際道路測試評價階段,分別對被測ADV 開展基于ODC 邊界的實際道路測試和主觀評價,兩者的測試評價結果作為試驗結果整體輸出。
3 ADV測試道路符合性評估技術
3.1 基于OEDR的實際道路分類方法
OEDR 水平直接體現了ADV 執行動態駕駛任務的能力,是決定駕駛自動化程度的核心因素。ADV 實際道路測試本質上是考察ADV 的OEDR 能力,即ADV 對目標和事件的探測、識別和分類,以及對目標和事件探測結果的響應。這里的“目標”包括靜態和動態道路交通參與者,“事件”包括道路交通參與者攜帶的靜態信息或發生的動態變化。
提出一種基于OEDR 的實際道路分類方法,該方法將道路交通參與者種類和復雜度作為道路類型劃分依據,用于測試驗證ADV的OEDR能力。
根據目標和事件的類型不同,可將OEDR 的功能劃分為、、3個維度的集合。
:探測和響應靜止或動態的機動車;
:探測和響應結構化交通標志和基礎設施等;
:探測和響應弱勢道路使用者,例如行人、騎行者、動物等。
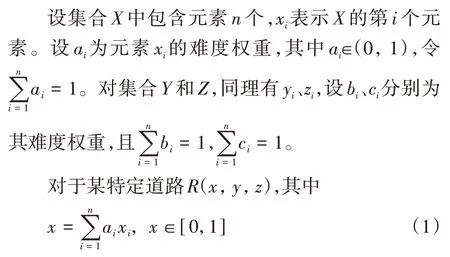
根據x的定義可知,x={0,1},即在式(1)中只考慮元素x在道路中是否出現過,不考慮其出現次數,y和z同理,、同理可分別由y、z計算得出。
當由0 逐漸增大,表示道路中車輛逐漸增多,車流越復雜,車輛的不可預測性越強。極端情況下,當=0 時,道路中沒有車輛,或道路中的車輛與被測車輛僅有可預測(例如,無需探測即可響應)的交匯,當=1 時,說明集合中的元素全部在道路中出現。
當由0 逐漸增大,表示道路結構化程度減弱,道路中場景的復雜度增加。當=0 時,道路有完備的符合標準的交通標志,且道路基礎設施呈結構化特點;當=1 時,說明集合中的非結構化元素全部在道路中出現。
由0逐漸增大的情況,同理可知。
如圖2 所示,由于道路元素的多樣性及其出現的隨機性,任意范圍的路段都可認為是OEDR 的功能三維空間中的離散點,道路()的坐標變化反映道路的車輛、基礎設施和弱勢參與者的復雜程度,由確定的立方體體積越大,道路的測試復雜度越高。
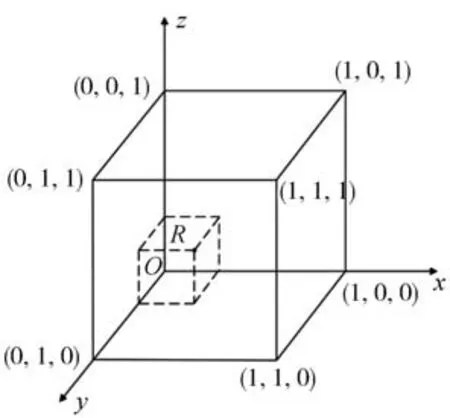
圖2 OEDR三維坐標系
當、、分別取不同值時,其表征的道路可映射到典型道路類型上,見表1。

表1 ADV測試典型道路表
如表1 所示,、、和類道路環境相對封閉,適用于各類功能型無人車的測試研究。類道路非結構化、機動車和弱勢使用者幾乎不存在,適用于農用和軍用自動駕駛車輛測試研究。本文研究對象是具備自動駕駛功能的M 類、N 類、O 類汽車,、和類道路符合本文研究對象開展實際道路測試的需求和實際情況。綜上所述,本文基于OEDR 將用于M 類、N 類、O 類汽車開展測試的道路分為3類,即I/II/III類道路。
Ⅰ類道路:僅可由機動車行駛,并能全部控制出入或根據需要控制出入、存在多條車道的道路。此類道路均為結構性道路,路面平整、交通設施完善,交通參與者僅為機動車且交通運行狀態較為通暢。此類道路主要對應類。
Ⅱ類道路:機動車和非機動車共用,連接住宅區、經濟中心或工業園區的道路。此類道路大多位于城市內部且具備交通信號燈等設施,其交通參與者包括非機動車和行人,易發生擁堵等情況更為復雜的事件。此類道路主要對應類。
Ⅲ類道路:機動車和非機動車共用,連通縣或鎮、鄉的道路。與Ⅰ和Ⅱ類相比,此類道路交通參與者種類繁多,交通環境極為復雜。此類道路主要對應類。
3.2 基于ODD的測試道路元素基礎模型構建
選擇測試道路的核心是為選擇測試場景,科學選擇測試場景須考慮自動駕駛車輛設計運行域(ODD)因素。
德國PEGASUS 項目及起草過程中的ISO 34503分別給出了ODD 的分類模型。根據國際上廣泛認可的分類方法和我國實際交通情況,將ODD 的元素歸類為靜態元素、動態元素和輔助元素3 大類。靜態元素包括:區域元素、形態元素、路面元素、交通設施元素等;動態元素包括交通參與者元素、天氣、交通運行狀態等;輔助元素包括網聯通信元素等,如圖3所示。

圖3 用于道路選擇的ODD元素分類方法
為滿足不同設計運行范圍的ADV 測試需求,本研究通過采集分析北京、上海、天津等5 個城市的典型道路元素,提出Ⅰ~Ⅲ類道路對應的測試元素基礎模型,如表2所示。

表2 不同類型道路的測試元素基礎模型
3.3 基于Jaccard Similarity 有效相似度的測試道路評估方法
Jaccard Similarity 方法,又稱為Jaccard 相似系數,用于比較有限樣本集之間的相似性與差異性。Jaccard系數值越大,樣本相似度越高。
給定兩個集合A、B,Jaccard 系數定義為(A∩B)元素個數與(A∪B)元素個數的比值,定義為

式中:表示在A 中出現但未在B 中出現的元素個數;表示未在A 中出現但在B 中出現的元素個數;表示在A和B中都出現的元素個數。
本研究改進了Jaccard Similarity 方法,計算備選測試道路包含的測試元素與所屬道路類型的基礎元素模型的有效相似度,通過相似度計算結果評估備選測試道路是否符合測試需求。
改進的有效相似度計算公式為

式中:表示備選測試道路元素與所屬道路類型元素基礎模型的有效相似度;A 為所屬道路類型的元素基礎模型(即元素集合);B 為備選測試道路包含元素的集合。與式(2)相比,測試道路有效相似度的計算中剔除了元素,這是由于備選道路中不屬于基礎元素模型,其對被測ADV 的實際道路測試沒有價值,但卻可能降低必要元素相似度值,因此在計算有效相似度時沒有將納入計算。
4 ADV實際道路測試評價研究
4.1 自動駕駛汽車實際道路測試評價體系
ADV 的安全性是自動駕駛技術應用不能突破的基線指標,行駛效率則反映自動駕駛車輛在準確性、及時性和順暢性方面的表現。因此,實際道路測試需要綜合考核自動駕駛系統在其設計運行條件內的安全與效率。
安全性可通過對ADV 功能和性能的定量客觀測試完成,而行駛效率更適宜采用主觀評價方式。主客觀相結合的評價方法體系在較多的領域具備應用案例。本文中引入主觀評價方法,從乘員感受出發,對ADV 在實際道路行駛的準確性、及時性和順暢性等維度進行主觀量化,結合客觀測試的定量分析,建立ADV實際道路測試評價體系。
4.2 自動駕駛汽車實際道路測試評價方法
4.2.1 基于ODC邊界的測試評價方法
設計運行條件是指駕駛自動化系統設計時確定的適用于其功能運行的各類條件的總稱,包括設計運行范圍、車輛狀態、駕乘人員狀態和其他必要條件。
ADV 實際道路測試重點關注測試車輛在ODC內部及進出ODC 的臨界情況下的表現。如圖4 所示,ODC 關注的設計運行范圍、車輛狀態、駕乘人員狀態和其他必要條件將平面劃分為3 個區域,縱軸表示測試時間,ODC 與測試時間限定了ADV 測試的時空和狀態范圍,其表示為圖4中的柱狀體。
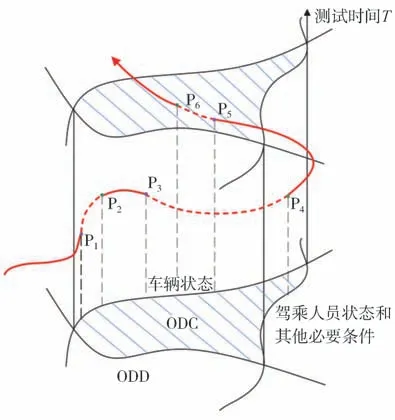
圖4 基于ODC邊界的測試示意圖
圖中陰影邊界分別對應ODD、車輛狀態、駕乘人員狀態和其他必要條件的邊界,即車輛的接管閾值。陰影內部為車輛應自動執行DDT 的區域,外部為車輛在實際道路測試過程中未激活自動駕駛系統的區域。圖中紅線表示車輛測試過程中進出ODC的路徑,其中P、P、P為車輛達到ODC 狀態進入有效測試狀態的臨界點,虛線表示在ODC 內部的路徑。P、P、P為車輛達到離開ODC 狀態的臨界點,實線為離開ODC區域的路徑。
基于ODC 邊界的測試評價方法具體分為4大項和39 個細項要求。其中通用要求1 項,同時測試ADV 在ODC 內執行DDT 和進出ODC 邊界時的表現;系統激活與停用4 項、系統后援15 項,測試ADV進出ODC 邊界時的表現;執行動態駕駛任務19 項,用于測試ADV 在ODC 內的駕駛表現。具體各測試指標示例見表3。
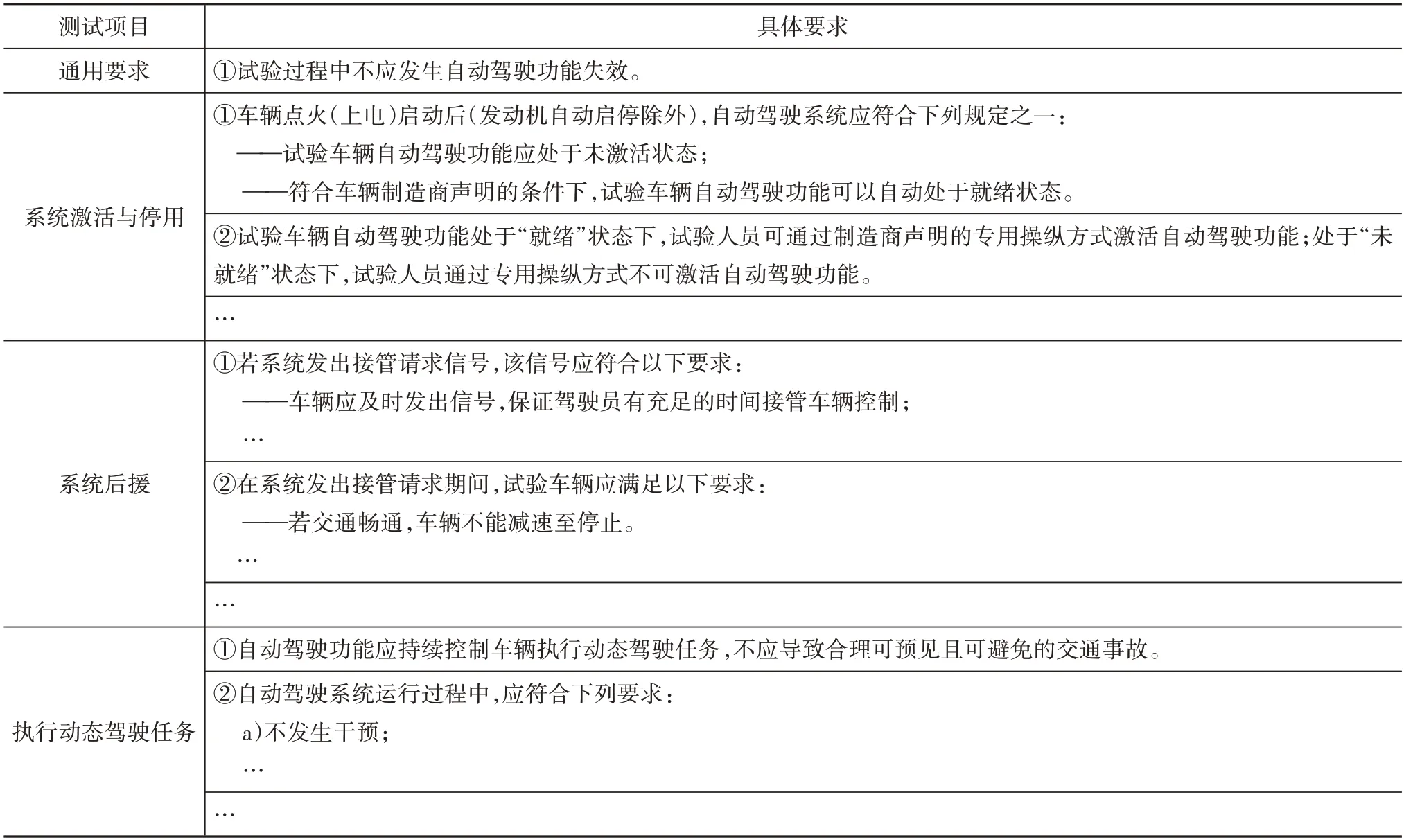
表3 基于ODC邊界閾值的測試指標示例
4.2.2 基于乘員感受的主觀評價方法
ADV 在行駛中的準確性、及時性和順暢性主要通過特定的功能運行表現和人機界面(human machine interface,HMI)激發乘員的主觀感受。因此在主觀評價ADV 行駛效率時,包括了功能運行和HMI兩個維度。此外,工業和信息化部《關于加強智能網聯汽車生產企業及產品準入管理的意見》中提出,智能網聯汽車生產企業應嚴格履行告知義務,因此將車輛產品說明手冊是否清晰易懂也作為主觀評價指標之一。具體主觀評價內容見表4。

表4 ADV實際道路測試主觀評價表
5 試驗驗證
5.1 測試道路符合性評估階段
在市場中選取自動駕駛待測車輛V,按照其設計運行范圍確定應在Ⅱ類道路開展實際道路測試。選取我國A市和B市備選道路各2條。根據式(3)計算A 市兩條道路的Jaccard Similarity 有效相似度分別為71%和72%,B 市兩條道路的分別為72%和74%,本文中選取有效相似度最高的B 市實際道路(=74%)開展測試,該道路地圖路線如圖5所示。

圖5 我國B市實際測試道路地圖路線
5.2 試驗實施階段與試驗結果
本次測試里程為634 km,其中自動駕駛里程為614 km。測試時間總計72 h,自動駕駛系統激活實際覆蓋20 h 06 min。根據4.2 節提出的方法開展測試,在客觀評價方面,采用ODC 邊界法得到被測車輛V 實際道路測試結果。其中通過14 項,未通過6項,不具備功能19 項。表5 列出ADV 實際道路測試執行動態駕駛任務測試項目的不符合項。
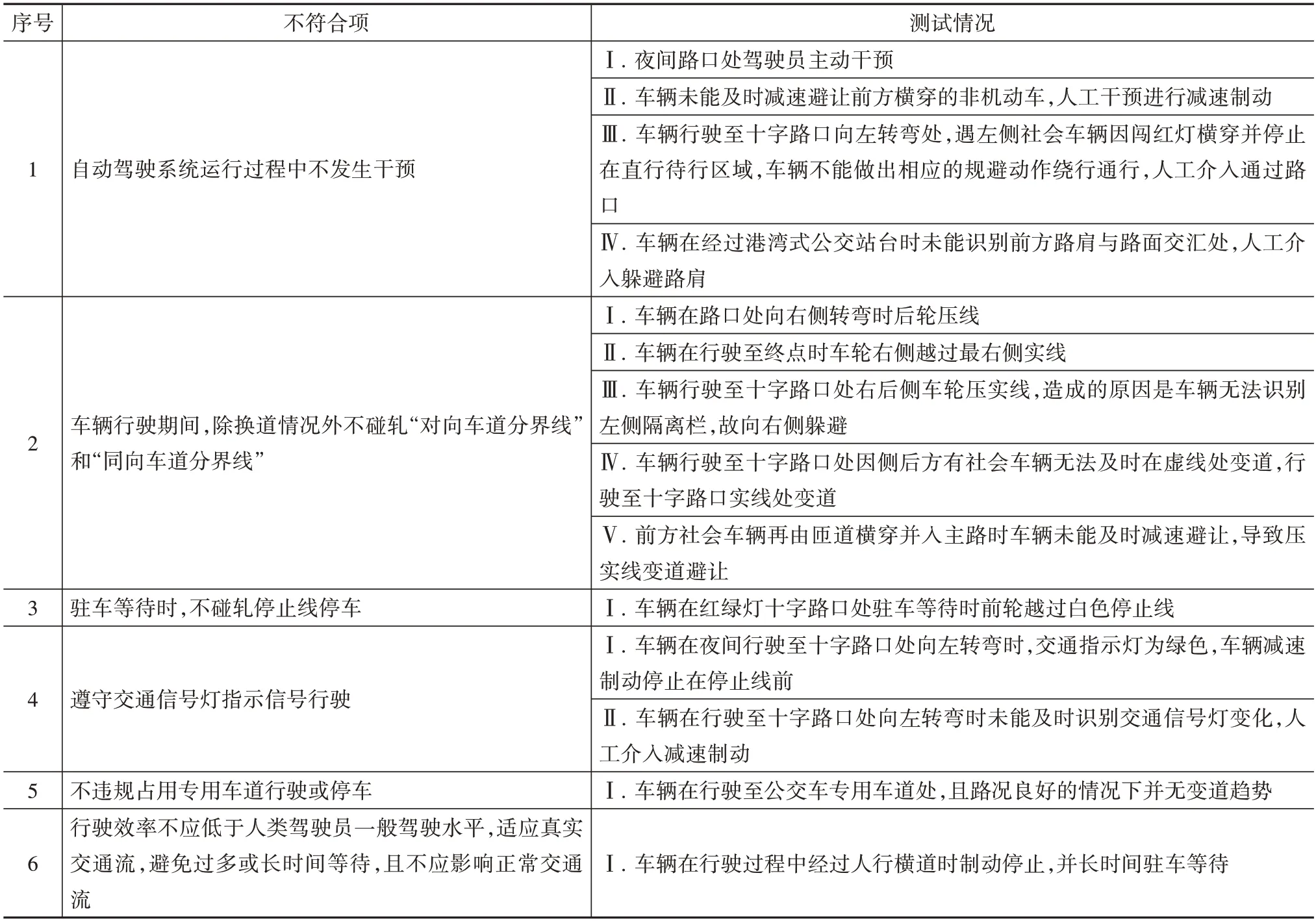
表5 ADV實際道路測試未通過項結果
本次試驗的主觀評價人員由3 名來自國家級第三方檢測機構試驗室工作人員擔任。打分情況如表6所示(略去試驗車輛不具備的功能)。
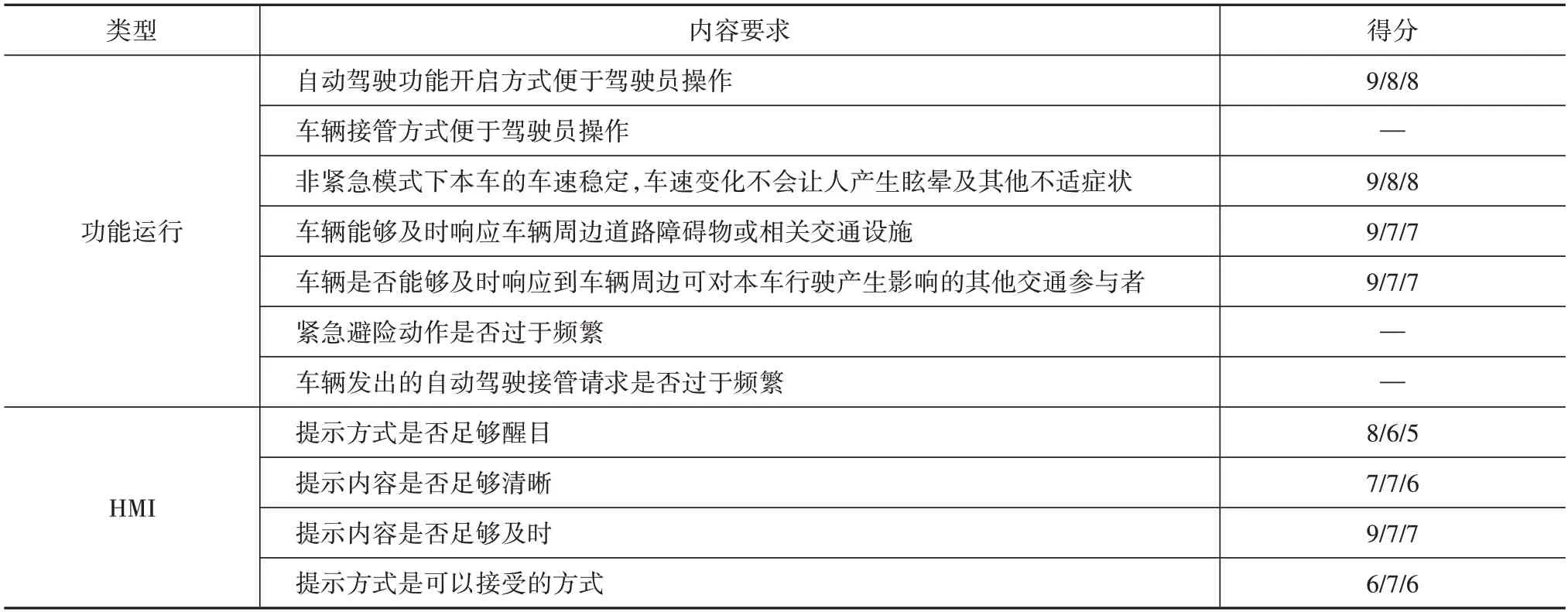
表6 主觀評價打分匯總表
本次試驗應用所提出的實際道路符合性評估方法,確定了試驗道路,順利開展對被測車輛的測試評價工作,驗證了該評估方法的可行性與實用性。
應用所提出的基于ODC 邊界的測試技術,有效驗證了被測車輛在實際道路的行駛安全和行駛效率,暴露了被測車輛存在的問題,達到測試目的;應用所提出的基于乘員感受的主觀評價方法,評價結果分數集中度較高,驗證了評價指標設置的合理性,能夠反映自動駕駛車輛在實際交通環境下的真實表現。
6 總結展望
提出自動駕駛實際道路測試與評價的工程框架,在該框架下基于OEDR、ODD 等自動駕駛功能特征提出道路分類及基礎元素模型,通過Jaccard 有效相似度確定備選道路符合性評估方案,形成了結合ODC邊界閾值實際道路測試和基于乘員感受的主客觀綜合測試評價體系,并選取我國實際道路進行驗證試驗,證明了本文提出的自動駕駛汽車實際道路標準化測試評價方案的可行性和普適性。
由于目前我國具備L3 及以上自動駕駛功能的汽車產品尚未完全成熟定型,本文中主要面向自動駕駛汽車的關鍵核心功能測評進行研究,側重智能網聯新技術應用的前瞻性探索和基本原理研究。后續也將推動所研究的相關成果形成技術標準,在未來自動駕駛技術和產品的發展以及標準實施中,積極汲取實踐經驗,持續優化和完善面向L3 及以上的自動駕駛汽車實際道路標準化測試評價體系。
猜你喜歡
石油瀝青(2021年4期)2021-10-14 08:50:44
世界科學技術-中醫藥現代化(2021年10期)2021-03-02 05:52:06
現代檢驗醫學雜志(2016年3期)2016-11-15 01:59:56
中學語文(2015年21期)2015-03-01 03:52:11
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中國工程咨詢(2015年2期)2015-02-14 02:59:26
西南軍醫(2015年1期)2015-01-22 09:08:16
中國音樂教育(2014年9期)2014-05-20 10:26:24
治淮(2013年1期)2013-03-11 20:05:18
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51