基于Unity 3D的虛擬操作系統設計
2022-07-04 01:02:50謝宏飛
電子測試 2022年10期
謝宏飛
(湛江科技學院,廣東湛江,524000)
0 引言
傳統的虛擬操作系統會產生很多的誤差,一定程度上為企業的正常生產帶來消極影響,嚴重的甚至會造成較大的經濟損失[4]。所以,面對這種情況,需要在真實的環境之中,創建更為靈活的虛擬操作流程,以此來進一步提升整體的運行控制效果。Unity 3D技術的出現解決了虛擬操作系統存在的多種問題以及缺陷,并將系統的設計往更加智能化、多元化、信息化的方向引領[5]。Unity 3D技術在虛擬操作系統中的應用一定程度上提升了系統整體的應用運行能力,同時增加了系統實際的處理范圍,減少操作時間,可以同時完成多個虛擬任務,具有實際的應用意義。因此,對基于Unity 3D的虛擬操作系統進行設計。在較為真實的環境之下,創建可以復用的虛擬操作系統,并且驗證系統的訪問以及應用情況,實現系統的創新以及優化[7]。
1 系統硬件設計
1.1 虛擬數據操作采集板塊設計
在進行Unity 3D下的虛擬操作系統設計之前,需要先進行相關的硬件設計。在虛擬的操作系統控制電路之中,虛擬數據操作采集板塊主要是負責對中心數據采集的一種模擬量數據處理器。一般情況下,它對于數據的處理往往是依據系統的實際設計以及對應需求來決定的。本次設計可以采用HYVJ-KIB15690型號的數據采集板塊來進行主要是因為最近幾年的虛擬操作系統雖然運行操作速度極快,但是對于數據處理的相應要求也相對較高,這就要求數據采集板卡的性能要更高,并且對于不同數據的處理以及采集的程度較高,可以通過一個3路八位的模擬器來擴大輸入模塊的處理范圍,并將采集的數據模擬量與相應的處理器相關聯,形成中數據處理結構。通過ISA總線將服務器與數據采集板塊互聯,并在數據采集板上安裝采集模塊,同時與控制模塊相關聯,便可以控制數據采集板塊雙向運行。隨后,將虛擬模擬數字轉換器安裝在電路的電源側方,并在基礎的數據采集板塊之上,依據不同系統運行的需求,再結合對應的數據轉換比例,重新設定系統的可視化的精準度。
在此基礎上,將型號為AGVD-SDNV1400的26位半閃速結構模擬數字轉換器相關的數據信息作出更改調整,對相關的性能指標作出更改。完成對模擬數字轉換器性能指標參數的設定。通過上述的設定,最終完成對虛擬數據操作采集板塊的設計。
1.2 虛擬操作串口設計
在完成虛擬數據操作采集板塊的設計之后,接下來,進行虛擬操作串口的設計。操作串口是對系統執行的過程中,不同功能模塊處理情況作出把控的一種集成處理硬件。他的實際計算思維是根據虛擬以及服務器模式的應對虛化程度,來最終實現對串口操作的區分。可以在虛擬操作系統的驅動控制設備上進行執行分區空間的劃分,并創建對應的串口模擬處理結構,具體如圖1所示。
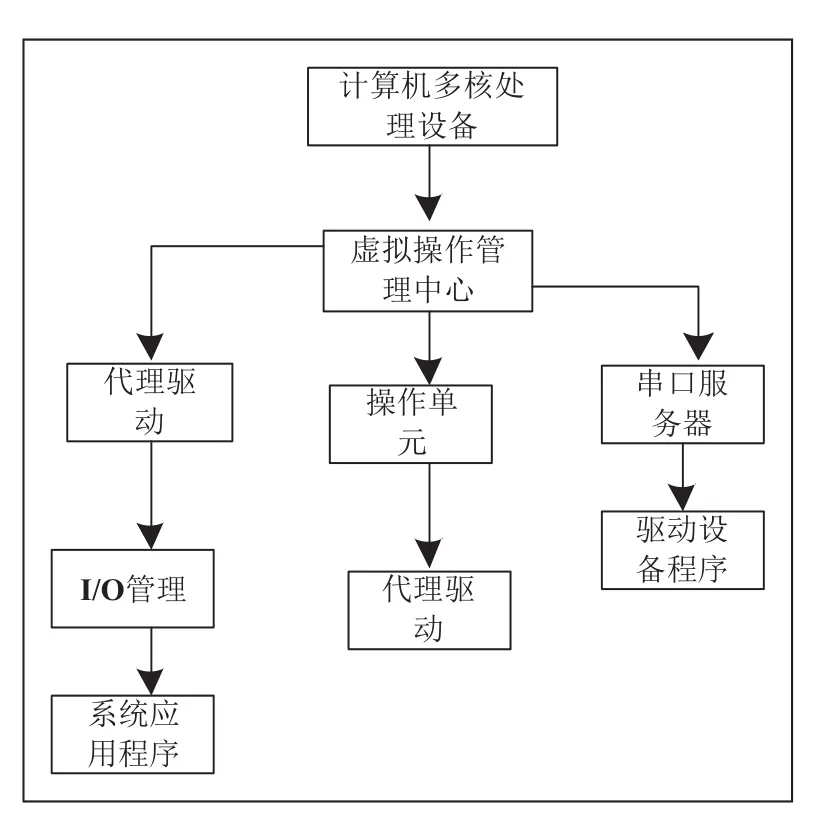
圖1 串口模擬處理結構圖
根據圖1中的處理結構,可以完成對虛擬操作系統串口模塊的設計。另外,虛擬操作系統串口的設計還要求載體設備自身攜帶符合系統運行的驅動程序,同時將相關的數據信息存儲在代理驅動程序之中。使接口與原載體設備的驅動接口保持一致,并實現內部訪問的封裝,隨后,根據初始的處理封裝格式,再將封裝的實際結果轉發至串口服務器之上。在此基礎上,在串口的服務器之上進行終端的設計,并將其與電源相連接,以此來構建一個虛擬的串口模塊,并將各分區對載體設備的轉換端口設定為多核心端口,以此來實現對虛擬串口載體設備的直接控制。但是需要注意的是,串口的設計與創建還需要依據系統的實際運行速度來區分,并對各分區之間的實時監測,監測裝備通常被安裝在虛擬運行節點之上,并形成串聯的形式,最終完成對虛擬操作串口的設計。
2 系統軟件設計
2.1 VRTOS虛擬調度指令設計
在完成系統硬件設計之后,接下來,需要進行相關的軟件設計。VRTOS虛擬調度實際上是一種集成的數據處理程序,主要是采用相應的數據處理程序來更改相應的調度結構,同時,在系統的控制結構之中,創建相關的動態優先級搶先式調度算法,并進行優先動態調度標準的設定。
進行VRTOS虛擬調度指令差值的計算,具體如下公式(1)所示。

公式(1)中:G表示VRTOS虛擬調度指令差值的計算,L表示優先服務層級標準,通過上述計算,最終可以完成對VRTOS虛擬調度指令差值的計算,在差值的范圍之內,進行VRTOS虛擬調度指令的設計。
2.2 Unity 3D技術下層級目標虛擬處理隊列的構建
在完成VRTOS虛擬調度指令的設計之后,接下來,在Unity 3D技術下進行層級目標虛擬處理隊列的構建。首先,利用Unity 3D技術創建初始虛擬處理隊列,然后,在此基礎上,進行win32 API的設計,并將任務、內存、互斥量、信號量、消息隊列以及定時器等設定成為資源管理層級。并在系統的預設管理模塊之中實現了Byte和 Block的兩種類型的處理,最終在此程序之中,進行實時虛擬結構的模擬,并且建立相對應的數據庫,將其與VRTOS虛擬調度指令相關聯,形成具體的應用隊列。
3 系統測試
3.1 測試準備
進行本次測試的相關準備,具體如下:選取一個企業的生產操作系統作為本次測試的目標對象,采取黑盒測試的方式來進行,需要選擇3臺服務器,并將其在控制程序上相關聯,對應的IP地址依據測試的環境更改調整為196.56.25.214.02段,同時將時段的控制區域設定在(102.35,50.25),隨后,創建測試的環境,獲取采集相應的系統運行初始數據信息,并將其匯總整合,根據測試段來計算可視化層次細節顆粒度,具體如下公式(2)所示。

公式2中:K表示可視化層次細節顆粒度,χ表示系統層級范圍,α表示預期作用范圍,f表示系統可控程度。通過上述計算,最終可以得出實際的可視化層次細節顆粒度。依據得出的可視化層次細節顆粒度,設定系統的虛擬操作執行指令,并將得出的數據信息,添加在指令編輯軟件之中,完成對操作執行指令的編制。將指令添加在初始的操作系統之中,并調整對應的執行結構,使其處于完成的應用狀態之下。完成測試環境的搭建之后,接下來,對測試所用的相關設備參數指標作出設定,具體如下表1所示。

表1 測試設備指標參數標準設定表
根據上表1中的數據信息,最終可以完成對測試設備的設定以及調整,完成之后,對系統相關的細節作出對應的調整。核查設備是否處于穩定的運行狀態,同時確保不存在影響最終測試結果的外部因素,核查無誤后,開始系統測試。
3.2 測試過程及結果分析
在上述所搭建的測試環境之中進行測試。為了驗證Unity 3D技術下的虛擬操作系統整體的性能,進行相關的實驗。測試平臺設定為Matlab 2021,同時,測試的相關數據均來自某企業的生產辦公室。對系統的運行延時情況作出分析與研究。將數據信息導入系統之中,在預設的處理程序之中添加虛擬操作指令,依據實際情況,創建層級處理結構,并制定優先級的操作協議,利用目標任務來進行優先級傳輸程序的設定,并且采用優先調度的方式來實現數據的向下傳輸,通過Unity 3D技術來進行數據的處理與整合,并將其形成三維實體模型,在顯示板上可以更改對應的執行數據信息,以此來修改對應的執行指令。最終得出相應的系統延時數據,對其作出分析研究,如下表2所示。

表2 系統測試結果分析表
根據表2中的數據信息,最終可以得出結論:在不同的虛擬調度范圍測試環境下,與未應用Unity 3D技術的系統相比,應用的系統所得出的延時率相對較低,表明系統的運行效果較好,十分流暢,卡頓的現象相對較少,同時虛擬操作的程序更加貼合實際,并具有更強的靈活性,便于應對所發生的各種運行情況,具有實際的應用意義。
4 結束語
便是對基于Unity 3D的虛擬操作系統的設計與分析。Unity 3D技術下的虛擬操作系統具有更強的靈活性,同時在應對不同情況時,可以實現更加全面、系統的應用處理,一定程度上提升了系統整體的執行能力,并且系統各項軟件的分化能力也有了明顯的提升,使綜合的運行處理流程更加通順,功能逐漸完善,可利用性加強,添加的可視化功能也進一步實現了三維可視化的虛擬系統操作,為相關行業的發展提供了極大的便利,對于虛擬化技術也是一種創新。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
工業設計(2022年8期)2022-09-09 07:43:20
世界科學技術-中醫藥現代化(2022年3期)2022-08-22 00:32:50
云南化工(2021年8期)2021-12-21 06:37:54
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
海洋信息技術與應用(2020年1期)2020-06-11 12:43:56
傳媒評論(2019年4期)2019-07-13 05:49:14
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
