鳥撞試驗彈托脫殼過程模擬與試驗驗證
2022-07-05 08:21:56陳國棟黃福增
航空發動機 2022年2期
劉 闖,魏 峰,陳國棟,黃福增,繆 旭
(遼寧省航空發動機沖擊動力學重點實驗室,沈陽 110015)
0 引言
鳥撞是指在飛行過程中航空器與飛鳥相撞造成的飛行事故,對航空飛行安全的危害極大。世界各航空發達國家均以軍標或適航規章的形式對鳥撞事件做出了相關要求。中國民航局發布的航空發動機適航管理規定中指出發動機在設計定型過程中需要進行大、中、小3種不同質量的鳥撞驗證試驗,因此在航空發動機的研制階段就必須開展鳥撞擊分析及試驗研究,以提高安全性和可靠性。
鳥撞問題是發生在毫秒級時間內的沖擊非線性動力學問題,具有動態載荷、柔性撞擊、大變形和應變率高等特點,國內外許多學者對此開展了大量的深入研究。Kavithamol等利用ABAQUS軟件對飛機機翼前緣受飛鳥撞擊的響應進行了分析;Lavoie等通過對明膠彈和真實鳥體的高速撞擊行為進行對比,認為明膠彈是目前作為人工鳥彈的最好選擇;陳偉等對航空發動機風扇葉片受到鳥撞擊以后的動態響應和損傷進行了數值模擬分析。
羅剛等、柴象海等在研究中指出,鳥撞試驗是評估航空器抗鳥類沖擊能力的最有效方法;李迪等進行了寬弦空心風扇葉片大鳥撞擊試驗;謝燦軍等對鳥撞試驗過程進行了總結:概括來說就是將明膠彈放入彈托,裝進炮管,通過高壓空氣將彈體增速到預定速度,并在炮口處將彈殼剝離,鳥彈繼續穿過剝離器向前飛出撞擊試驗件的過程;李達誠研究指出,鳥彈為軟質、低強度物體,在突然承受高壓強作用時極易破碎,同時彈體在發射過程中會與炮管發生高速摩擦,造成的彈體磨損以及產生的熱量都會破壞彈體,因此在鳥撞試驗中需要設計彈托承載鳥體并對其進行保護。在鳥彈彈托的制作過程中,目前廣泛采用膨脹固化材料,這樣生產出的彈托成本低、加工周期短,但存在尺寸精度差且極易破碎的問題,在高精度的鳥撞試驗中,金屬彈托得到了越來越多的應用。
在某型發動機風扇鳥撞試驗中,設計了鋁制鳥彈彈托裝載模擬鳥彈。為保證試驗的安全性和有效性,要防止彈托在脫彈過程中發生損壞以及其碎片飛入試驗艙。本文針對彈托與脫彈器碰撞過程進行了仿真分析,并利用壓縮空氣炮進行了鳥彈發射試驗,將仿真與試驗結果進行了對比。
1 脫彈過程的數值仿真
在某型航空發動機風扇葉片鳥撞試驗中,鳥彈彈托和脫彈器的結構模型如圖1所示。試驗時要求鋁彈托以84 m/s的速度從炮管中飛出,撞擊脫彈器并完成脫彈。
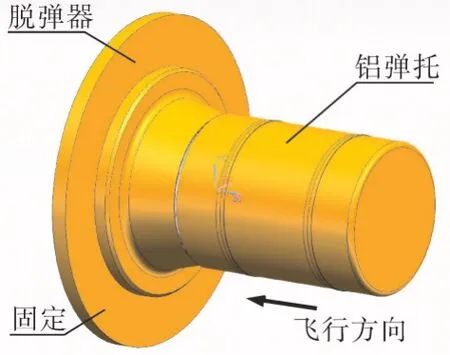
圖1 彈托和脫彈器的結構模型
鋁彈托材料為高強度鋁合金5A06,脫彈器材料為45鋼。彈托與脫彈器撞擊為大變形和高應變率問題,選用帶失效模型的Johnson-Cook(以下簡稱J-C)材料模型對沖擊過程進行分析,并利用Gruneisen狀態方程描述材料所受的壓力與體積之間的關系。J-C模型利用變量乘積關系分別描述屈服應力、塑形應變、應變率和溫度對應力水平的影響,其本構模型和失效模型為


式中:σ為流動應力;為屈服應力參數;為硬化系數;ε為等效塑性應變;為硬化指數;為應變率系數;為無量綱應變率;為無量綱溫度;為溫度系數;為失效應變;~為無量綱材料參數;為平均應力和有效應力的比值。
采用ANSYS LS-DYNA有限元分析軟件對彈托和脫彈器沖擊過程進行分析,由于模型具有幾何對稱性,為簡化計算,選取1/4模型進行分析,采用solid164實體單元對模型進行網格劃分,建立3維有限元模型,如圖2所示。solid164單元為8節點單元,采用單點積分和沙漏控制算法。在進行網格劃分時,全部采用六面體單元進行掃掠分網,以控制仿真過程中出現的沙漏現象;針對彈托與脫彈器撞擊時前端應力水平較高且變化較快的特點,在前端采用較細的網格劃分,逐漸過渡到彈托后端較粗的單元,從而在保證計算效率的基礎上有效提高仿真精度。彈托和脫彈器共劃分56380個單元,邊界條件及載荷施加情況為:(1)鳥彈托初始速度為84 m/s;(2)鳥彈托和脫彈器子午面施加對稱約束;(3)脫彈器安裝平面約束所有自由度。
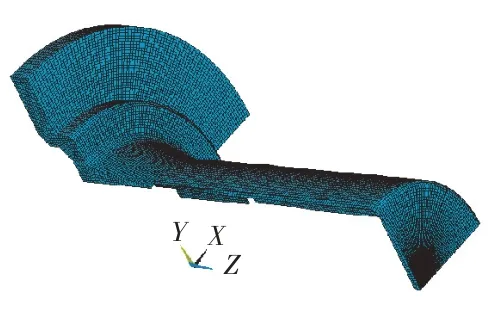
圖2 彈托和脫彈器的3維有限元模型
在高速沖擊作用下,彈托沖擊脫彈器時有一個侵徹的力學行為,為了更好地還原這種情況,彈托與脫彈器的接觸設置采用面-面侵蝕接觸,接觸剛度因子取1.0,動靜摩擦系數均取0.15。
2 計算結果及分析
2.1 變形分析
鳥彈彈托在向前運動的過程中,其前端與脫彈器發生碰撞,隨著碰撞過程的進行,彈托的變形也不斷變大,前端沿脫彈器錐筒型面逐漸張開成喇叭狀,如圖3所示。在彈托上沿軸向依次選取共13個點作為變形參考點(如圖4所示),其徑向位移隨時間變化的曲線如圖5所示。
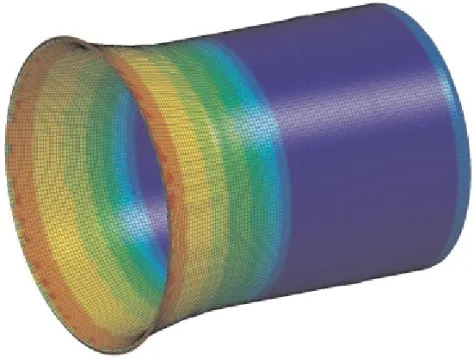
圖3 彈托變形
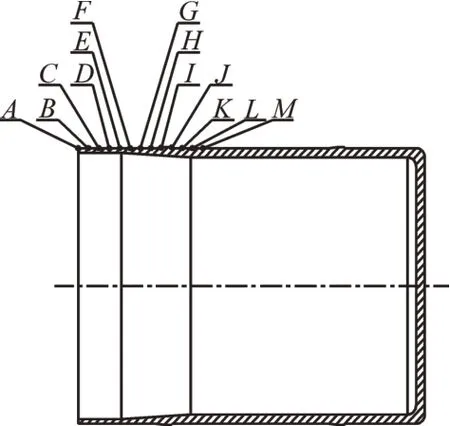
圖4 彈托變形參考點選取
從圖5中可見,隨著彈托與脫彈器沖擊過程的進行,選取的各參考點依次發生變形,反映了在脫彈碰撞過程中應力逐漸向后傳遞的特點。彈托前緣徑向變形最大,達到1.9cm,距離彈托前緣越遠,徑向變形越小,至距離彈托前緣72 mm時,變形僅為1.6 mm,分析表明彈托僅在前端發生了明顯變形,中后段無明顯變形。
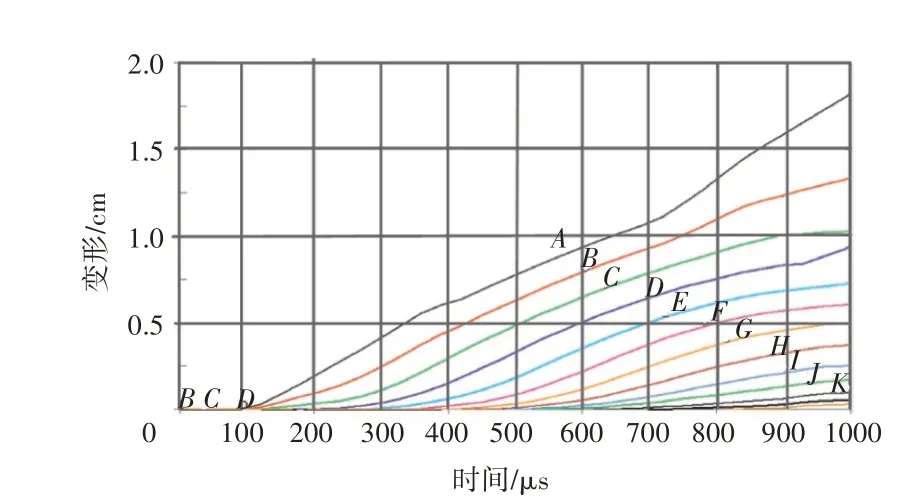
圖5 彈托徑向變形隨時間變化的曲線
2.2 應力分析
在沖擊過程中,彈托的等效應力變化過程如圖6所示。從圖中可見,在第90μs后彈托與脫彈器發生接觸。隨著接觸區逐漸增大,彈托的應力水平不斷提高,至第840μs時,彈托的前端已到達脫彈器錐段的底部,彈托前端應力達到892 MPa,高應力區已向后擴展至軸向約80 mm處(從彈托前緣算起),彈托前端不斷產生塑性變形。彈托中后段始終保持很低的應力水平(約80 MPa),不會因沖擊作用發生損壞而導致其碎片飛入艙體。
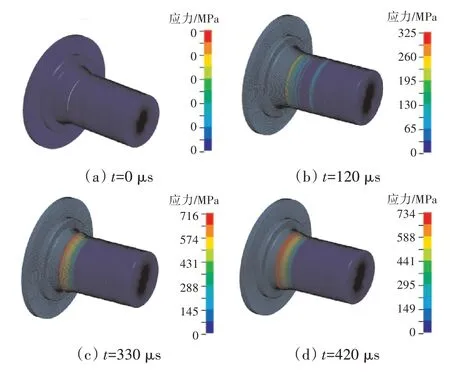
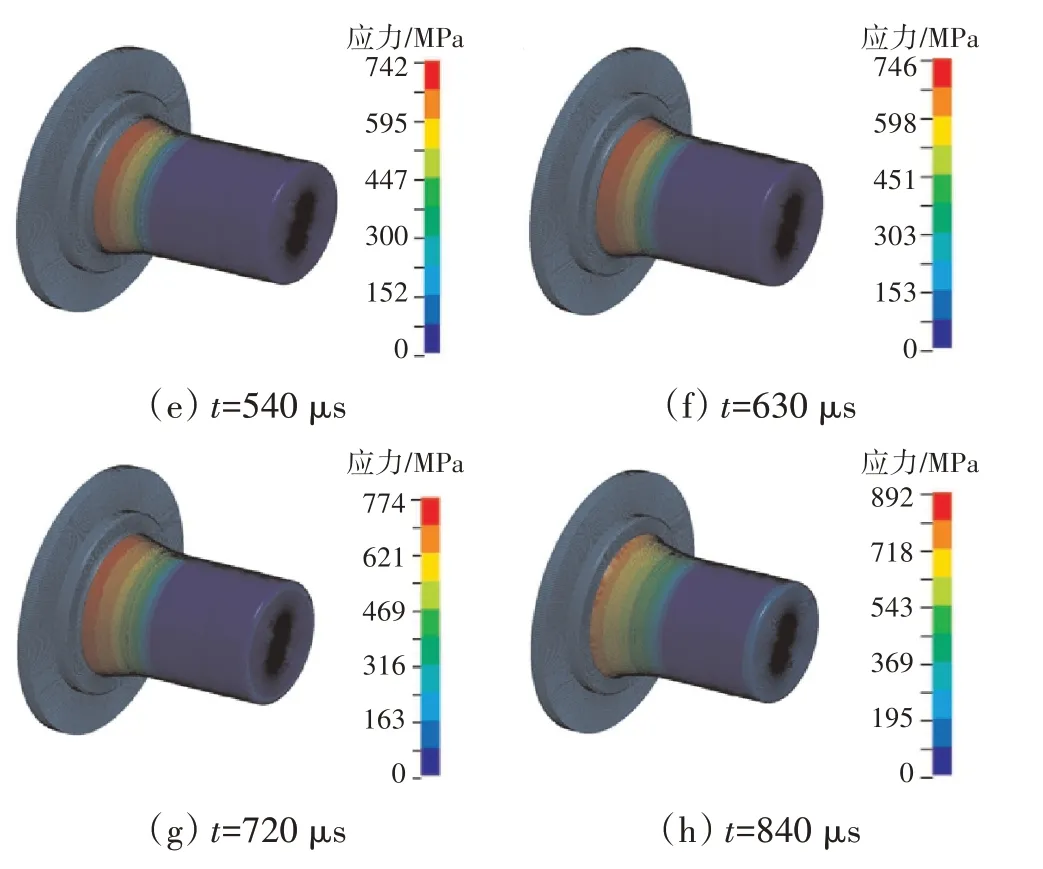
圖6 彈托的等效應力變化過程
2.3 能量分析
隨著彈托向前運動,脫彈器對彈托的反作用力也越來越大,而反作用力的方向與彈托的運動方向相反,因此在脫彈過程中,隨著沖擊過程的進行,彈托的動能迅速衰減,彈托動能衰減曲線如圖7所示。從圖中可見,彈托初始動能在1 ms內從4.58 kJ快速衰減到0,這是由于在沖擊過程中,動量在極短的時間內迅速變化,形成了很高的瞬時沖擊載荷,在沖擊載荷作用下,彈托前段應力遠大于材料的屈服應力,產生了明顯的塑性變形,彈托的動能因被吸收而迅速衰減。

圖7 彈托動能衰減曲線
3 鳥撞脫彈試驗
采用壓縮空氣炮作為動力源進行了鳥彈發射試驗。試驗裝置主要由氣源、儲氣罐、快速開啟機構、炮管、脫彈器等部分組成,其結構如圖8所示。
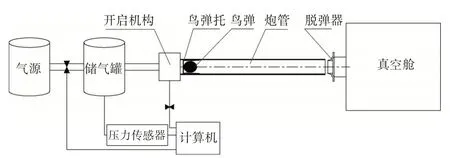
圖8 試驗裝置結構
在鳥撞試驗中,通過試驗裝置中的快速開啟結構,儲氣罐中的壓縮空氣進入炮管推動鳥彈向前運動,鳥彈被加速至預定速度后飛出炮管,而后彈托被脫彈器攔阻并箍在脫彈器上,在完成脫彈的同時還有效防止了壓縮空氣進入真空艙,模擬鳥彈在慣性作用下從脫彈器中心孔穿過,飛入真空艙撞擊試驗件。
采用激光束發射接收的方法對鳥彈飛行速度進行測量,速度測量系統結構如圖9所示。測速裝置由2組平行的發射器和接收器組成,測量其間距,并使其與鳥彈飛行方向垂直。鳥彈經過第1組激光器時激光束被遮擋,光電開關觸發啟動計時,經過第2組激光器時,光電開關再次觸發結束計時,獲取鳥彈經過2組激光器的時間間隔為Δ,則鳥彈飛行的平均速度為=/Δ。
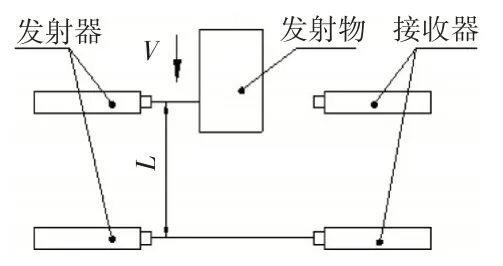
圖9 速度測量系統結構
在試驗中,實際鳥撞速度為83 m/s,與目標速度誤差為1.2%,符合速度誤差在±3%范圍內的要求。彈托撞擊脫彈器后,前端發生喇叭狀開口變形,如圖10所示。經與仿真結果(圖3)對比發現,彈托變形方式相同。對試驗后彈托進行尺寸測量,彈托前緣變形達到1.82 cm,比仿真結果低4.4%,證明了本文所采用的分析方法的有效性。
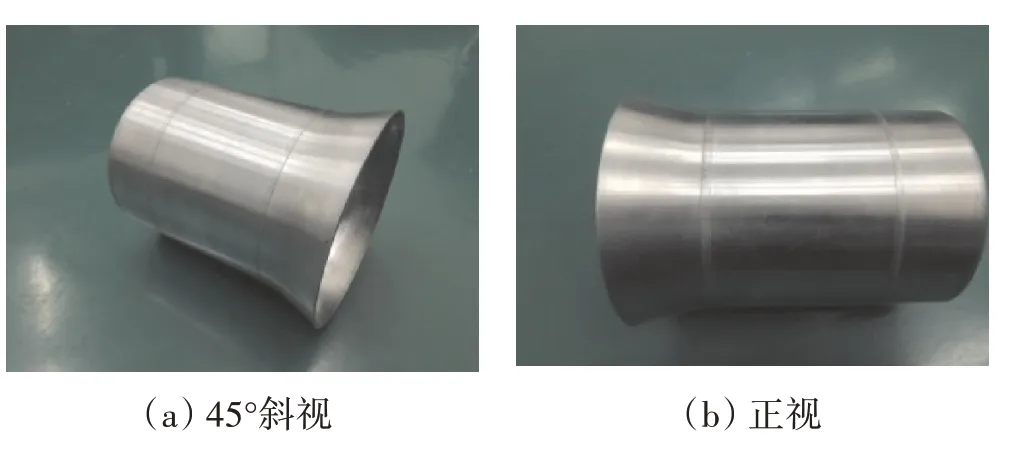
圖10 彈托變形后照片
4 結論
(1)通過仿真分析獲取的鳥彈彈托變形結果與試驗結果基本一致,驗證了分析方法的有效性;
(2)在脫彈過程中,彈托前端會在沖擊載荷作用下產生喇叭狀開口,中后段始終保持很低的應力水平,不會因沖擊作用發生破損導致碎片飛入艙體;
(3)在進行彈托的結構設計時,需要重點關注彈托前端在撞擊后的變形,防止因塑性變形過大而導致彈托撕裂;
(4)彈托與脫彈器發生撞擊后,動能迅速衰減,約在1 ms后衰減到0。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
中華詩詞(2020年1期)2020-09-21 09:24:52
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
山東工業技術(2016年15期)2016-12-01 05:31:22