基于自適應(yīng)EKF-AHI的鋰電池SOC加權(quán)估計(jì)
2022-07-07 23:16:49張帥帥畢愷韜顏文旭倪宏宇儲(chǔ)杰
現(xiàn)代信息科技 2022年4期
張帥帥 畢愷韜 顏文旭 倪宏宇 儲(chǔ)杰

摘? 要:為了更準(zhǔn)確估計(jì)鋰電池的SOC,從兩方面考慮,即模型選擇和估計(jì)算法。首先,為了減小由于模型引起的估計(jì)誤差,采用帶有遺忘因子的遞推最小二乘法對(duì)二階RC等效電路模型參數(shù)進(jìn)行在線辨識(shí),實(shí)現(xiàn)鋰電池模型參數(shù)的自適應(yīng)。其次,針對(duì)SOC的估計(jì),提出了基于EKF結(jié)合AHI法實(shí)現(xiàn)加權(quán)在線估計(jì)。實(shí)驗(yàn)表明所提方法相比其中單一算法具有更高的估計(jì)精度和穩(wěn)定性,尤其是提高了低SOC區(qū)間的估計(jì)精度,驗(yàn)證了所提算法的有效性。
關(guān)鍵詞:SOC估計(jì);在線參數(shù)辨識(shí);EKF;AHI;加權(quán)算法
中圖分類號(hào):TM912? ? ? ? ?文獻(xiàn)標(biāo)識(shí)碼:A文章編號(hào):2096-4706(2022)04-0048-06
Lithium Battery SOC Weighting Estimation Based on Adaptive EKF-AHI
ZHANG Shuaishuai1, BI Kaitao1, YAN Wenxu1, NI Hongyu2, CHU Jie2
(1.School of Internet of Things Engineering, Jiangnan University, Wuxi? 214122, China; 2.State Grid Shaoxing Power Supply Company, Shaoxing? 312000, China)
Abstract: In order to estimate the SOC of lithium battery more accurately, this paper considers two aspects: model selection and estimation algorithm. Firstly, in order to reduce the estimation error caused by the model, the recursive least square method with forgetting factor is used to identify online the second-order RC equivalent circuit model parameters, so as to realize the self-adaptive of the lithium battery model parameter. Secondly, for SOC estimation, a weighting online estimation based on EKF and AHI is proposed. Experiments show that the proposed method has higher estimation accuracy and stability than the single algorithm, especially the estimation accuracy of low SOC interval, and verifies the effectiveness of the proposed algorithm.
Keywords: SOC estimation; online parameter identification; EKF; AHI; weighting algorithm
0? 引? 言
由于鋰電池相較于其他類型電池具有能量密度高、使用壽命長(zhǎng)、綠色環(huán)保等優(yōu)點(diǎn)[1],目前作為主要的動(dòng)力源和儲(chǔ)能單元已廣泛應(yīng)用于多個(gè)領(lǐng)域。因此,為了更好地優(yōu)化電池管理系統(tǒng)(Battery Management System, BMS)[2],保證電池使用的安全性和可靠性是非常有必要的。BMS的難點(diǎn)之一是SOC的估計(jì)[3,4]。SOC的精度直接對(duì)系統(tǒng)的安全管理、決策和均衡控制等起到?jīng)Q定性作用。
影響SOC的估計(jì)精度主要來自模型選擇和估計(jì)算法。首先,針對(duì)模型的選擇,文獻(xiàn)[5-7]給出了目前鋰電池估計(jì)SOC時(shí)常用的幾種等效電路模型,比如RINT模型、n階RC模型、GNL模型和PNGV模型等,像GNL模型、PNGV模型等一些改進(jìn)的等效電路模型復(fù)雜,估計(jì)精度高,但是算法計(jì)算量比較大,不太適用于工程實(shí)踐中。針對(duì)SOC的估計(jì),常見的方法有開路電壓(Open Circuit Voltage, OCV)法[8]、安時(shí)積分法(Ampere Hour Integral, AHI)[9]、卡爾曼濾波系列算法[10-13]和人神經(jīng)網(wǎng)絡(luò)法[14]等。AHI法和OCV法是最簡(jiǎn)單的方法,復(fù)雜度低。但是AHI法因?yàn)榇嬖诜e分環(huán)節(jié)導(dǎo)致誤差無法消除且隨時(shí)間推移會(huì)逐漸增大;而OCV法需要電池進(jìn)行長(zhǎng)時(shí)間靜置提前獲悉SOC-OCV關(guān)系且受多方面影響,不適用于汽車的實(shí)時(shí)在線估計(jì);卡爾曼濾波系列算法可以利用噪聲傳感器使系統(tǒng)的均方根估計(jì)誤差降低,但是對(duì)建模精度要求較高,并且卡爾曼系列算法目前大都無法解決在低SOC區(qū)間下誤差不可控的情況;神經(jīng)網(wǎng)絡(luò)算法雖然精度較高,但計(jì)算量大且耗時(shí)長(zhǎng)。因此在選擇模型和SOC估計(jì)算法時(shí)都要考慮估計(jì)精度與復(fù)雜度。
為此,本文首先用帶有遺忘因子的遞推最小二乘法(Forgetting Factor Recursive Least Squares, FFRLS)對(duì)模型進(jìn)行在線參數(shù)辨識(shí),實(shí)現(xiàn)模型參數(shù)的動(dòng)態(tài)更新,以減小由參數(shù)辨識(shí)引起的估計(jì)誤差;然后將辨識(shí)出來的模型參數(shù)作為輸入,通過基于擴(kuò)展卡爾曼濾波(Extended Kalman Filter, EKF)算法結(jié)合AHI法的加權(quán)實(shí)時(shí)估計(jì)SOC,充分利用兩種算法的優(yōu)點(diǎn)來提高SOC的估計(jì)精度,既可以解決AHI法因?yàn)榉e分環(huán)節(jié)導(dǎo)致誤差累積的天然弊端,也有效解決了EKF在線性化時(shí)忽略高階項(xiàng)所引起估計(jì)誤差的局限性和嚴(yán)重依賴于電池模型的問題,有效提高了整個(gè)SOC區(qū)間的估計(jì)精度,尤其降低了在低SOC區(qū)間下的誤差。DCD84A21-20B9-4127-8F37-916BA023FC35
1? 鋰電池建模和參數(shù)估計(jì)
1.1? 鋰電池等效電路模型
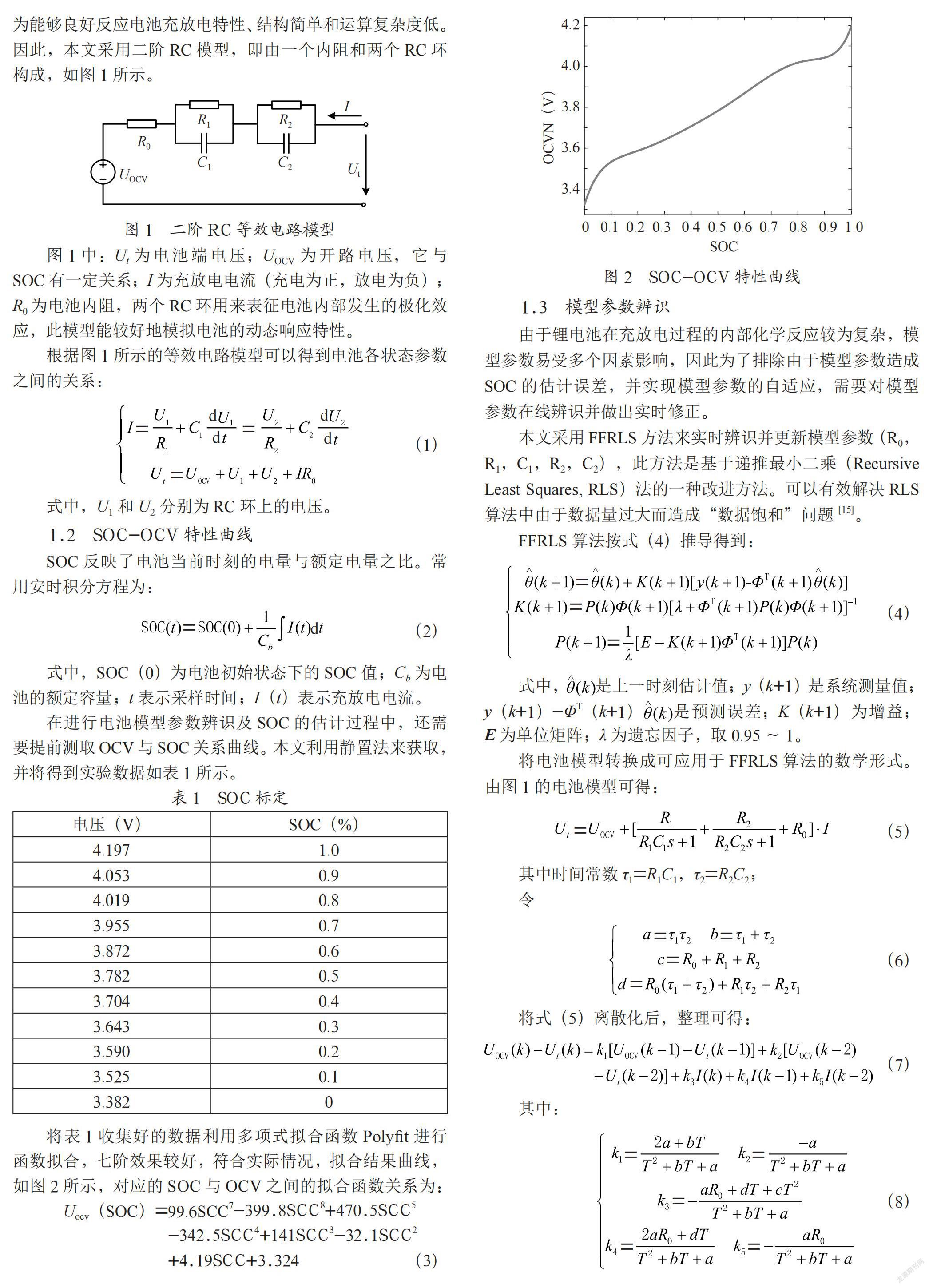
等效電路模型是SOC估計(jì)中最常用的模型,這主要因?yàn)槟軌蛄己梅磻?yīng)電池充放電特性、結(jié)構(gòu)簡(jiǎn)單和運(yùn)算復(fù)雜度低。因此,本文采用二階RC模型,即由一個(gè)內(nèi)阻和兩個(gè)RC環(huán)構(gòu)成,如圖1所示。
圖1中:Ut為電池端電壓;UOCV為開路電壓,它與SOC有一定關(guān)系;I為充放電電流(充電為正,放電為負(fù));R0 為電池內(nèi)阻,兩個(gè)RC環(huán)用來表征電池內(nèi)部發(fā)生的極化效應(yīng),此模型能較好地模擬電池的動(dòng)態(tài)響應(yīng)特性。
根據(jù)圖1所示的等效電路模型可以得到電池各狀態(tài)參數(shù)之間的關(guān)系:
式中,U1和U2分別為RC環(huán)上的電壓。
1.2? SOC-OCV特性曲線
SOC反映了電池當(dāng)前時(shí)刻的電量與額定電量之比。常用安時(shí)積分方程為:
式中,SOC(0)為電池初始狀態(tài)下的SOC值;Cb為電池的額定容量;t表示采樣時(shí)間;I(t)表示充放電電流。
在進(jìn)行電池模型參數(shù)辨識(shí)及SOC的估計(jì)過程中,還需要提前測(cè)取OCV與SOC關(guān)系曲線。本文利用靜置法來獲取,并將得到實(shí)驗(yàn)數(shù)據(jù)如表1所示。
將表1收集好的數(shù)據(jù)利用多項(xiàng)式擬合函數(shù)Polyfit進(jìn)行函數(shù)擬合,七階效果較好,符合實(shí)際情況,擬合結(jié)果曲線,如圖2所示,對(duì)應(yīng)的SOC與OCV之間的擬合函數(shù)關(guān)系為:
Uocv(SOC)=99.6SCC7-399.8SCC8+470.5SCC5
-342.5SCC4+141SCC3-32.1SCC2
+4.19SCC+3.324(3)
1.3? 模型參數(shù)辨識(shí)
由于鋰電池在充放電過程的內(nèi)部化學(xué)反應(yīng)較為復(fù)雜,模型參數(shù)易受多個(gè)因素影響,因此為了排除由于模型參數(shù)造成SOC的估計(jì)誤差,并實(shí)現(xiàn)模型參數(shù)的自適應(yīng),需要對(duì)模型參數(shù)在線辨識(shí)并做出實(shí)時(shí)修正。
本文采用FFRLS方法來實(shí)時(shí)辨識(shí)并更新模型參數(shù)(R0,R1,C1,R2,C2),此方法是基于遞推最小二乘(Recursive Least Squares, RLS)法的一種改進(jìn)方法。可以有效解決RLS算法中由于數(shù)據(jù)量過大而造成“數(shù)據(jù)飽和”問題[15]。
FFRLS算法按式(4)推導(dǎo)得到:
式中,是上一時(shí)刻估計(jì)值;y(k+1)是系統(tǒng)測(cè)量值;y(k+1)-ΦT(k+1)是預(yù)測(cè)誤差;K(k+1)為增益;E為單位矩陣;λ為遺忘因子,取0.95~1。
將電池模型轉(zhuǎn)換成可應(yīng)用于FFRLS算法的數(shù)學(xué)形式。由圖1的電池模型可得:
其中時(shí)間常數(shù)τ1=R1C1,τ2=R2C2;
令
將式(5)離散化后,整理可得:
其中:
式中T為采樣時(shí)間,即可將式(8)代入FFRLS的辨識(shí)方法中,其中:
其中θ是FFRLS算法中的直接辨識(shí)參數(shù)﹐模型參數(shù)再由θ推導(dǎo)而出。
令k0=T2+bT+a,可以推出:
至此,式(10)即是等效電路模型中所有參數(shù)的估計(jì)值。
2? 聯(lián)合估計(jì)算法
2.1? EKF算法
卡爾曼濾波系列算法本質(zhì)上是一種最小方差的估計(jì)算法。其核心思想是:利用上一時(shí)刻的狀態(tài)估計(jì)值和當(dāng)前時(shí)刻的觀測(cè)值來求得當(dāng)前時(shí)刻的狀態(tài)估計(jì)值,同時(shí)更新狀態(tài)變量[16]。標(biāo)準(zhǔn)卡爾曼濾波只適用于線性系統(tǒng),但是由式(3)可以看出UOCV(SOC,k)是一個(gè)非線性函數(shù),對(duì)于非線性系統(tǒng),本文采用EKF算法。
設(shè)鋰電池非線性模型的狀態(tài)和觀測(cè)方程為:
x(k+1)=f[x(k),u(k)]+W(k) (11)
y(k)=g[x(k),u(k)]+V(k) (12)
分別將系統(tǒng)中的非線性函數(shù)f [x(k),u(k)]和g[x(k),u(k)]線性化,得到近似線性化狀態(tài)空間方程:
x(k+1)≈A(k)x(k)+B(k)u(k)+W(k)? (13)
y(k)≈C(k)x(k)+Y(k+1)+V(k)(14)
其中:
然后利用基本線性卡爾曼濾波的方法進(jìn)行計(jì)算。計(jì)算公式為:
在使用EKF算法之前,要將式(1)和式(2)進(jìn)行離散化,得到離散化的狀態(tài)方程和輸出方程,如式(17)~式(18):
Ut(k)=Uocv(SOC,k)+U1(k)+U2(k)+I(k)R0(18)
式(17)和式(18)已經(jīng)建立了電池模型的狀態(tài)空間表達(dá)式,對(duì)狀態(tài)空間表達(dá)式進(jìn)行線性化處理。得到A(k),B(k)和C(k)分別為:
然后利用式(16)進(jìn)行EKF的遞推運(yùn)算。從公式(17)和(18)看出,EKF算法本質(zhì)上其實(shí)還是基于OCV法去估計(jì)SOC;其步驟是先利用AHI法得到SOC的初值,然后通過辨識(shí)出來的等效電路模型參數(shù)計(jì)算出電池的端電壓,并和觀測(cè)出來的端電壓之間的誤差作為校正SOC的依據(jù);同時(shí),狀態(tài)和觀測(cè)方程中的W和V還考慮了噪聲和誤差的影響,通過計(jì)算出每次迭代的濾波增益k(k),從而得到SOC的最優(yōu)估計(jì)。
2.2? EKF-AHI加權(quán)算法
由圖2的SOC-OCV曲線可以觀察到,基于開路電壓法的EKF算法在SOC特定區(qū)間里(例如SOC在0.2~0.5和0.7~0.9區(qū)間)時(shí),斜率較小,即SOC對(duì)OCV的微小變化過于敏感,由于EKF算法本質(zhì)上是基于OCV法去估計(jì)SOC,在此區(qū)間內(nèi)難以準(zhǔn)確估算SOC,容易造成誤差。
此外,基于二階RC的等效模型的SOC估計(jì)算法還有一個(gè)弊端,從公式(16)(17)可以看到EKF算法對(duì)非線性函數(shù)使用泰勒展開式進(jìn)行一階線性化時(shí),忽略了其余的高階項(xiàng),從而導(dǎo)致了由于線性化所引起的估計(jì)誤差,會(huì)使濾波發(fā)散,具體會(huì)表現(xiàn)在EKFS算法在估計(jì)SOC時(shí),會(huì)始終與參考值保持一定的誤差且無法單獨(dú)消除,其誤差根源就在于忽略的高階項(xiàng),這種誤差在SOC較高時(shí),所占比值可以當(dāng)作估計(jì)誤差忽略不計(jì);但是在低SOC區(qū)間時(shí),雖然SOC估計(jì)誤差本身并沒有發(fā)生明顯變化,但所占比值會(huì)因SOC逐漸降低而增大,這是EKF算法本身存在的局限性。因此EKF算法是最小方差準(zhǔn)則下的次優(yōu)濾波器,其性能依賴于局部非線性度。DCD84A21-20B9-4127-8F37-916BA023FC35
綜合以上分析,為了降低誤差,提高SOC的估計(jì)精度,尤其是低SOC區(qū)間的精度,本文增加AHI法作為基于OCV法的EKF算法的一種輔助算法,兩種算法通過加權(quán)的方式進(jìn)行融合。算法流程圖如圖3所示。
圖3中,SOCEKF和WEKF分別代表著主要算法EKF所估算出的SOC和所代表算法的權(quán)重大小,SOCAHI和WAHI代表著輔助的AHI法估算出的SOC和權(quán)重大小,兩種算法的權(quán)重之和應(yīng)為1。權(quán)重分配法則依據(jù)SOC-OCV分段線性曲線中每段的斜率進(jìn)行權(quán)重分配,表2為各個(gè)SOC線段區(qū)間的斜率。因?yàn)镋KF算法本質(zhì)上是基于OCV法改進(jìn)而來,斜率的大小和主要算法EKF所估算出來的SOC權(quán)重成正相關(guān),和輔助算法AHI法所估算SOC的權(quán)重呈負(fù)相關(guān),即斜率較大時(shí),則表明更多的是依靠EKF算法所估計(jì)的SOC,說明EKF算法所估計(jì)的SOC越精確。相反時(shí),則表明更多的是依靠AHI法所估算SOC,說明AHI法越精確。
實(shí)時(shí)權(quán)重分配根據(jù)前一時(shí)刻所聯(lián)合估算的SOC值進(jìn)行分配,這樣就實(shí)現(xiàn)了SOC的閉環(huán)估計(jì)。表2為具體權(quán)重分配圖,具體的分配規(guī)則為:WEKF的權(quán)重為當(dāng)前EKF算法估計(jì)的SOC值所對(duì)應(yīng)的SOC-OCV曲線各個(gè)線段斜率與線段最大斜率之比,兩種算法權(quán)重的大小代表了該種算法所估算SOC值的可信程度。
最終獲得的SOC估算結(jié)果為:
SOC=WEKF×SOCEKF+WAHI×SOCAHI(19)
至此,式(19)把兩種算法巧妙地結(jié)合起來,一方面利用EKF算法作為主要算法去估計(jì)SOC,另一方面增加AHI法作為輔助算法去修正SOC,然后利用SOC-OCV曲線斜率作為權(quán)重分配的依據(jù),接著通過加權(quán)的方式聯(lián)合估算SOC,最后通過加權(quán)算法將所估計(jì)的SOC進(jìn)一步返回迭代,實(shí)現(xiàn)了SOC的閉環(huán)估計(jì)。該聯(lián)合算法不僅融合了基于OCV法的EKF算法和AHI法各自的優(yōu)點(diǎn),還能克服AHI法由于存在積分環(huán)節(jié)導(dǎo)致誤差持續(xù)增大的缺點(diǎn),此外,還有效解決了EKF算法嚴(yán)重依賴于模型參數(shù)導(dǎo)致在某些特定SOC區(qū)間情況下誤差不可控和線性化變換中忽略了高階項(xiàng)所引起誤差的弊端,能夠得到較好的估算結(jié)果。
3? 實(shí)驗(yàn)驗(yàn)證與分析
為了驗(yàn)證上述算法的可靠性,本次實(shí)驗(yàn)數(shù)據(jù)所使用UDDS工況,所采用的鋰電池標(biāo)稱電壓為3.6 V,充電和放電截止電壓分別為4.2 V和3.2 V,最大充電電流為40 A,最大放電電流為60 A,容量為33 Ah。圖4即為UDDS工況下的電流變化示意圖,采樣時(shí)間為1 s,共采集18 000個(gè)數(shù)據(jù)。
3.1? FFRLS在線參數(shù)辨識(shí)
圖5(a)和圖5(b)為FFRLS算法在線辨識(shí)五個(gè)參數(shù)(R0,R1,C1,R2,C2)的結(jié)果。
在UDDS工況下,辨識(shí)剛開始階段,各個(gè)電池參數(shù)都有一些劇烈的變化,這可能是參數(shù)初始化存在較大偏差所導(dǎo)致的,但是隨著FFRLS算法的作用,各參數(shù)值逐漸趨于穩(wěn)定。因此,由圖5可知,即使給定初值不準(zhǔn)確,F(xiàn)FRLS算法也能及時(shí)修正各個(gè)參數(shù),使參數(shù)快速收斂到真實(shí)值附近并保持穩(wěn)定。根據(jù)UDDS工況數(shù)據(jù)實(shí)時(shí)迭代更新五個(gè)參數(shù),這樣就可以把圖1所示原本靜態(tài)的二階RC模型動(dòng)態(tài)化,將電池模型轉(zhuǎn)變?yōu)闀r(shí)變系統(tǒng),從而實(shí)現(xiàn)電池模型參數(shù)的自適應(yīng),有利于提高SOC的估計(jì)精度。
3.2? SOC聯(lián)合估計(jì)
圖6(a)和圖6(b)為二階RC等效電路模型在UDDS工況下EKF算法所估計(jì)的端電壓和端電壓參考值之間的比較。從這兩張圖可以看出,EKF算法所估計(jì)的端電壓趨勢(shì)均與參考值相似,誤差精度較小,誤差范圍在-0.025~0.021 V,說明EKF算法穩(wěn)定性較好,跟蹤精度也很高,驗(yàn)證了所提模型的高精度性和穩(wěn)定性。
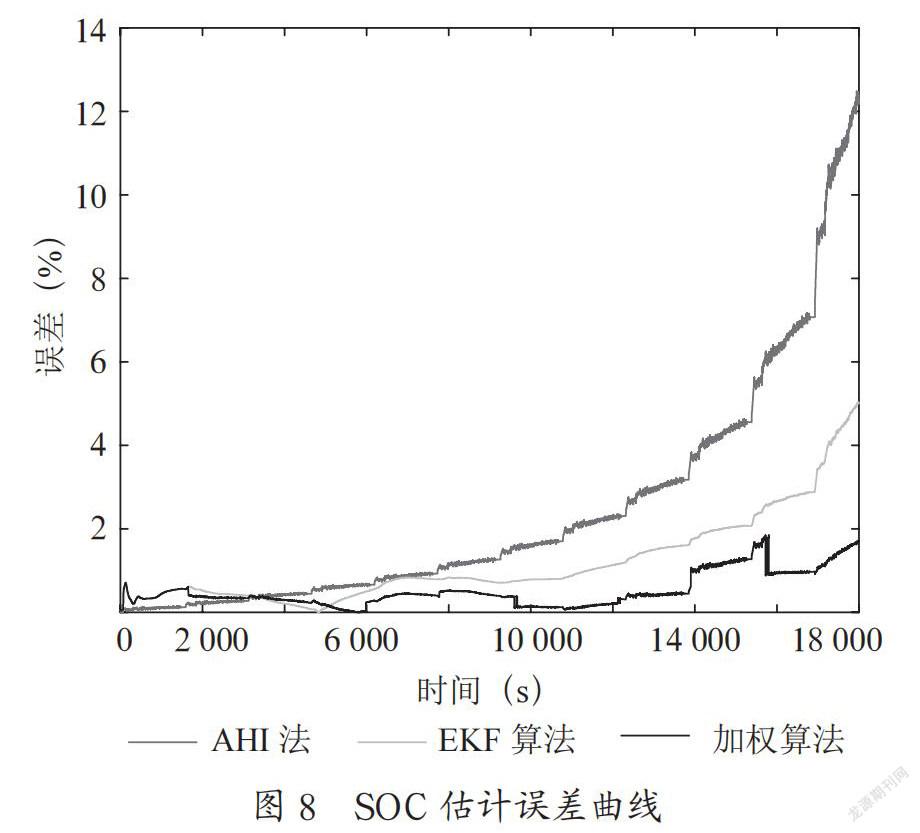
在UDDS工況下,利用3.1節(jié)中所辨識(shí)的參數(shù),使用EKF算法計(jì)算鋰電池SOC,并結(jié)合AHI法進(jìn)行加權(quán),然后與SOC參考值、AHI法和EKF算法進(jìn)行比較,如圖7和圖8所示。圖7為各個(gè)算法的估計(jì)曲線,圖8為SOC估計(jì)誤差。
從圖中可以看出:所有算法在SOC比較高的時(shí)候(50%~100%),即使是AHI法也都有著不錯(cuò)的性能,誤差都在2%以內(nèi),但是隨著放電時(shí)間的增長(zhǎng),AHI法由于存在積分環(huán)節(jié),誤差逐漸增大,最大誤差甚至超過12%;而EKF算法相較于AHI法能一直保持較高的精度。但是在SOC較低時(shí)(0~30%),雖然誤差絕對(duì)值并沒有增加多少,但是由于SOC參考值減小,導(dǎo)致誤差百分比迅速增大,使SOC估計(jì)出現(xiàn)較大誤差,最大誤差甚至超過5%。這是由于二階RC模型本身存在的問題和EKF算法存在弊端。因此,使用單一算法無法解決;此外,在仿真過程中發(fā)現(xiàn):SOC參考值在較低時(shí)始終處在AHI法和EKF算法估計(jì)值之間,根據(jù)這一發(fā)現(xiàn),本文提出一種加權(quán)估計(jì)算法,將AHI法和EKF算法估計(jì)結(jié)果進(jìn)行加權(quán),使SOC估計(jì)值盡量跟隨參考值,尤其在低SOC區(qū)間,誤差得到顯著減小。仿真結(jié)果表明:加權(quán)算法所估計(jì)的SOC曲線較為光滑、平穩(wěn),說明穩(wěn)定性比較好,即使SOC較低時(shí),最大誤差也在2%以內(nèi),說明誤差精度很小。
為了比較三種算法(AHI法、EKF算法和加權(quán)算法)估計(jì)SOC的誤差精度,本文采用三個(gè)數(shù)學(xué)指標(biāo)來評(píng)估觀測(cè)器性能:SOC實(shí)驗(yàn)參考值和估計(jì)值之間的均方根誤差(Root Mean Square Error, RMSE)、最大絕對(duì)誤差(Maximum Absolute Error, MAE)[17]和平均絕對(duì)誤差(Mean Absolute Deviation, MAD),定義為:
(20)
MAE=max丨y*-y丨 (21)
(22)
式中,y*為估計(jì)值;y為參考值;N為樣本個(gè)數(shù)。
表3為各個(gè)算法估計(jì)SOC的RMSE、MAE和MAD對(duì)比情況。從表3分析可知,在UDDS工況下,加權(quán)算法在整個(gè)SOC區(qū)間明顯優(yōu)于EKF算法和AHI法,尤其是在SOC較低時(shí),也能有效地跟隨參考值。最大絕對(duì)誤差僅為1.85%,平均絕對(duì)誤差和均方根誤差均小于0.5%。因此,本文提出EKF和AHI法聯(lián)合加權(quán)算法優(yōu)于其中任何單個(gè)算法。DCD84A21-20B9-4127-8F37-916BA023FC35
4? 結(jié)? 論
為了能夠更準(zhǔn)確地估計(jì)鋰電池SOC,提高SOC估計(jì)的精度。本文先通過FFRLS對(duì)二階RC模型進(jìn)行實(shí)時(shí)參數(shù)辨識(shí),然后將辨識(shí)出來的參數(shù)作為輸入,再聯(lián)合EKF算法和AHI法去估計(jì)鋰電池SOC,在UDDS工況進(jìn)行分析對(duì)比,得到以下結(jié)論:
(1)基于FFRLS算法的參數(shù)辨識(shí)能夠準(zhǔn)確實(shí)時(shí)地獲取鋰電池二階RC模型參數(shù),避免了模型參數(shù)不精確引起的誤差。
(2)EKF算法聯(lián)合AHI法相比單一EKF算法或者AHI法能夠很好地預(yù)測(cè)鋰電池的SOC。尤其在較低SOC區(qū)間時(shí),依然能夠準(zhǔn)確估計(jì)SOC,使最大絕對(duì)誤差僅在2%以內(nèi),遠(yuǎn)遠(yuǎn)小于AHI法的12%和EKF算法的5%;平均絕對(duì)誤差和均方根誤差更是小于0.5%;能夠快速、穩(wěn)定地糾正給定值,更精確地估計(jì)出鋰電池的SOC。
綜上分析,EKF算法聯(lián)合AHI法比單一EKF算法或者AHI法更適合于鋰電池SOC的預(yù)測(cè)。
參考文獻(xiàn):
[1] LI Z,HUANG J,LIAW B Y,et al. On state-of-charge determination for lithium-ion battery [J].Journal of Power Sources,2017,348:281-301.
[2] 彭思敏.電池儲(chǔ)能系統(tǒng)及其在風(fēng)—儲(chǔ)孤網(wǎng)中的運(yùn)行與控制 [D].上海:上海交通大學(xué),2013.
[3] PARTOVIBAKHSH M,LIU G J. An Adaptive Unscented Kalman Filtering Approach for Online Estimation of Model Parameters and State-of-Charge of Lithium-Ion Batteries for Autonomous Mobile Robots [J].IEEE Transactions on Control Systems Technology,2015,23(1):357-363.
[4] 羅志亮.鋰電池荷電狀態(tài)自適應(yīng)估計(jì)算法研究 [D].哈爾濱:哈爾濱工業(yè)大學(xué),2016.
[5] CACCIATO M,NOBILE G,SCARCELLA G,et al. Real-time model-based estimation of SOC and SOH for energy storage systems [C]//2015 IEEE 6th International Symposium on Power Electronics for Distributed Generation Systems (PEDG).Aachen:IEEE,2015:1-8.
[6] 談發(fā)明,王琪.基于改進(jìn)無跡卡爾曼濾波算法的動(dòng)力電池SOC估計(jì)模型 [J].汽車技術(shù),2019(3):18-24.
[7] 羅勇,趙小帥,祁朋偉,等.車用動(dòng)力電池二階RC建模及參數(shù)辨識(shí) [J].儲(chǔ)能科學(xué)與技術(shù),2019,8(4):738-744.
[8] GISMERO A,SCHALTZ E,STROE D I. Recursive State of Charge and State of Health Estimation Method for Lithium-Ion Batteries Based on Coulomb Counting and Open Circuit Voltage [J].Energies,2020,13(7):1-11.
[9] 陳德海,華銘,徐王娟,等.優(yōu)化安時(shí)積分法實(shí)時(shí)預(yù)測(cè)電動(dòng)自行車電池SOC [J].電池,2019,49(1):41-45.
[10] 王黨樹,王新霞.基于擴(kuò)展卡爾曼濾波的鋰電池SOC估算 [J].電源技術(shù),2019,43(9):1458-1460.
[11] AUNG H,LOW K S,GOH S T. State-of-Charge Estimation of Lithium-Ion Battery Using Square Root Spherical Unscented Kalman Filter(Sqrt-UKFST)in Nanosatellite [J].IEEE Transactions on Power Electronics,2015,30(9):4774-4783.
[12] 宮明輝,烏江,焦朝勇.基于模糊自適應(yīng)擴(kuò)展卡爾曼濾波器的鋰電池SOC估算方法[J].電工技術(shù)學(xué)報(bào),2020,35(18):3972-3978.
[13] ZHANG L Y,ZHANG L,PAPAVASSILIOU C,et al. Intelligent Computing for Extended Kalman Filtering SOC Algorithm of Lithium-Ion Battery [J].Wireless Personal Communications,2018:2063-2076.
[14] 蘇振浩,李曉杰,秦晉,等.基于BP人工神經(jīng)網(wǎng)絡(luò)模型的動(dòng)力電池SOC估算方法 [J].儲(chǔ)能科學(xué)與技術(shù),2019,8(5):868-873.
[15] 田茂飛,安治國(guó),陳星,等.基于在線參數(shù)辨識(shí)和AEKF的鋰電池SOC估計(jì) [J].儲(chǔ)能科學(xué)與技術(shù),2019,8(4):745-750.
[16] CHAO H,YOUN B D,Chung J. A multiscale framework with extended Kalman filter for lithium-ion battery SOC and capacity estimation [J].Applied Energy,2012,92(C):694-704.
[17] 李嘉波,魏孟,李忠玉,等.基于自適應(yīng)擴(kuò)展卡爾曼濾波的鋰離子電池荷電狀態(tài)估計(jì)[J].儲(chǔ)能科學(xué)與技術(shù),2020,9(4):1147-1152.
作者簡(jiǎn)介:張帥帥(1995—),男,漢族,安徽蚌埠人,碩士研究生在讀,研究方向:鋰離子電池狀態(tài)估計(jì);通訊作者:顏文旭(1971—)男,漢族,福建莆田人,博導(dǎo),教授,博士,研究方向:電力電子技術(shù)及智能控制、電力系統(tǒng)及其自動(dòng)化。DCD84A21-20B9-4127-8F37-916BA023FC35