我國露天礦智能運(yùn)輸技術(shù)現(xiàn)狀及發(fā)展趨勢
2022-07-07 17:13:40王忠鑫辛鳳陽陳洪亮宋波田鳳亮曾祥玉白怡明
工礦自動化 2022年6期
關(guān)鍵詞:智能
王忠鑫, 辛鳳陽, 陳洪亮, 宋波, 田鳳亮, 曾祥玉, 白怡明
(1. 中煤科工集團(tuán)沈陽設(shè)計(jì)研究院有限公司,遼寧 沈陽 110015;2. 遼寧工程技術(shù)大學(xué) 礦業(yè)學(xué)院,遼寧 阜新 123000)
0 引言
露天開采過程的本質(zhì)是大規(guī)模土石方時(shí)空移運(yùn)過程,一般包括穿孔、爆破、采裝、運(yùn)輸、排棄(卸載)等環(huán)節(jié),其中運(yùn)輸環(huán)節(jié)是決定露天礦安全、經(jīng)濟(jì)、節(jié)能、低碳、綠色等屬性的最重要因素之一。隨著智能化礦山建設(shè)目標(biāo)的提出,露天礦運(yùn)輸環(huán)節(jié)的智能化成為重點(diǎn)研究對象之一,主要集中在智能運(yùn)輸系統(tǒng)(Intelligent Transportation System,ITS)領(lǐng)域和方向。
ITS最初為解決道路交通擁擠、交通事故等問題,由美國、日本等國家的學(xué)者提出。隨著研究不斷深入,系統(tǒng)功能擴(kuò)展到道路交通運(yùn)輸?shù)娜^程及其有關(guān)服務(wù)部門[1]。我國露天礦ITS與交通行業(yè)有著明顯的不同,其主要建設(shè)目標(biāo)是生產(chǎn)過程安全、高效、低碳環(huán)保。
我國露天礦大多興建于20世紀(jì)80年代,具有工藝先進(jìn)、設(shè)備大型、機(jī)械化程度高、設(shè)備種類繁雜、產(chǎn)量規(guī)模大等特點(diǎn)[2]。隨著計(jì)算機(jī)技術(shù)在礦山行業(yè)的應(yīng)用及推廣,各露天礦加強(qiáng)了對生產(chǎn)和設(shè)備運(yùn)行數(shù)據(jù)的重視,建立了管理信息系統(tǒng)、生產(chǎn)調(diào)度監(jiān)控系統(tǒng)等。近年來,設(shè)備自動化運(yùn)行、卡車無人駕駛、新能源汽車等新興技術(shù)突起,通過遠(yuǎn)程控制、作業(yè)區(qū)域減人、新能源替代不可再生能源等手段,實(shí)現(xiàn)露天礦安全、高效目標(biāo),已充分融合在露天礦智能化隊(duì)列中[3-4]。本文從基礎(chǔ)設(shè)施、裝備、管控、維保、設(shè)計(jì)5個(gè)方面,總結(jié)我國露天礦智能化運(yùn)輸關(guān)鍵技術(shù)及其應(yīng)用現(xiàn)狀,并對未來發(fā)展趨勢進(jìn)行展望。
1 露天礦運(yùn)輸系統(tǒng)
1.1 露天礦運(yùn)輸系統(tǒng)
露天礦運(yùn)輸系統(tǒng)是具有特定功能的、相互間具有有機(jī)聯(lián)系的多種要素構(gòu)成的整體。對露天礦運(yùn)輸系統(tǒng)而言,其特定功能是實(shí)現(xiàn)物料的空間位移,其要素是實(shí)現(xiàn)整個(gè)運(yùn)輸功能所需的基礎(chǔ)設(shè)施、運(yùn)輸工具、運(yùn)算技術(shù)及工作人員等,如圖1所示。

圖1 露天礦運(yùn)輸系統(tǒng)構(gòu)成Fig. 1 Composition of transportation system in open-pit mine
運(yùn)輸環(huán)節(jié)在露天礦各工藝環(huán)節(jié)中起“動脈”和“紐帶”作用,其他工藝環(huán)節(jié)和管理工作中存在的各種問題往往能在運(yùn)輸環(huán)節(jié)中得到集中反映[5]。為適應(yīng)不同的礦床賦存條件和開采要求,露天礦開采中使用的運(yùn)輸方式主要分為鐵路運(yùn)輸系統(tǒng)、卡車運(yùn)輸系統(tǒng)、帶式輸送機(jī)運(yùn)輸系統(tǒng)3類。
鐵路運(yùn)輸系統(tǒng)是早期露天礦開采廣泛采用的運(yùn)輸方式,但由于鐵路運(yùn)輸作業(yè)不靈活、前期投入大等局限性,目前已基本被卡車和帶式輸送機(jī)運(yùn)輸系統(tǒng)取代,本文不再贅述。
卡車運(yùn)輸系統(tǒng)作業(yè)機(jī)動靈活,能簡化開采工藝、減少基建工程量,但存在運(yùn)輸成本高、經(jīng)濟(jì)合理運(yùn)距短、維保難度大、環(huán)境污染嚴(yán)重等缺點(diǎn)。
帶式輸送機(jī)運(yùn)輸系統(tǒng)是一種連續(xù)運(yùn)輸方式,可保障開采設(shè)備連續(xù)作業(yè),運(yùn)輸能力和爬坡能力強(qiáng),易于實(shí)現(xiàn)自動控制,所需工作人員數(shù)量少,但存在初期投資成本高、靈活度低等缺點(diǎn)。
1.2 露天礦ITS
露天礦ITS是以露天礦煤巖高效運(yùn)輸為應(yīng)用場景,以智能化運(yùn)輸裝備為核心載體,將物聯(lián)網(wǎng)、云計(jì)算、大數(shù)據(jù)、人工智能、移動互聯(lián)等數(shù)字技術(shù)與露天礦運(yùn)輸系統(tǒng)運(yùn)行原理和工藝要求深度融合,建立運(yùn)輸系統(tǒng)內(nèi)設(shè)備、環(huán)境、物料的自主協(xié)同高效運(yùn)行體系,進(jìn)而建立大范圍內(nèi)發(fā)揮作用的實(shí)時(shí)、準(zhǔn)確、高效的運(yùn)輸綜合管理系統(tǒng)[6-8],同時(shí)促使系統(tǒng)中人的位置從端側(cè)向云邊側(cè)轉(zhuǎn)變,角色由設(shè)備操控運(yùn)維轉(zhuǎn)向智能應(yīng)用場景開發(fā)。
露天礦ITS與傳統(tǒng)運(yùn)輸系統(tǒng)的區(qū)別在于服務(wù)對象的重心由露天礦生產(chǎn)管理人員(如生產(chǎn)技術(shù)部、調(diào)度中心等部門人員)轉(zhuǎn)向露天礦生產(chǎn)作業(yè)人員(如礦山車輛司機(jī)、維保人員等),即用先進(jìn)的科技手段向生產(chǎn)作業(yè)人員提供必要的信息和便捷的服務(wù),以減少運(yùn)輸車輛裝卸點(diǎn)排隊(duì)、意外事故等情況發(fā)生,提高生產(chǎn)設(shè)備利用率,增加設(shè)備作業(yè)安全性,從而達(dá)到露天礦ITS實(shí)施目的。露天礦ITS構(gòu)成要素主要包括基礎(chǔ)設(shè)施、運(yùn)輸工具和運(yùn)算技術(shù)。基礎(chǔ)設(shè)施主要是網(wǎng)絡(luò)布設(shè);運(yùn)輸工具指不同運(yùn)輸方式所采用的裝備,如礦用卡車、帶式輸送機(jī)等;運(yùn)算技術(shù)指所需的軟件系統(tǒng)、平臺和算法等。
露天礦ITS將露天礦生產(chǎn)管理人員、生產(chǎn)作業(yè)人員、道路運(yùn)行、設(shè)備維保等相結(jié)合,集中系統(tǒng)地進(jìn)行管理,以提高露天礦整體生產(chǎn)運(yùn)行效率[9]。
2 露天礦智能運(yùn)輸技術(shù)現(xiàn)狀
2.1 基礎(chǔ)設(shè)施智能化技術(shù)
(1) 網(wǎng)絡(luò)布設(shè)現(xiàn)狀。露天礦網(wǎng)絡(luò)通信形式主要包括電臺通信、無線Mesh網(wǎng)絡(luò)、4G專網(wǎng)、5G-MEC(Multi-access Edge Computing,多邊緣接入計(jì)算)、5G專網(wǎng)、700 MHz+XGHz等。何林等[10]指出無線Mesh技術(shù)具有容量大、速率高、覆蓋范圍廣、成本低、組網(wǎng)簡單等特點(diǎn),基于無線Mesh網(wǎng)絡(luò)的通信系統(tǒng)在露天礦具有廣泛的應(yīng)用前景。郭文馨[11]提出了符合露天礦企業(yè)實(shí)際情況的4G無線通信系統(tǒng)技術(shù)方案,實(shí)現(xiàn)了專業(yè)語音集群通信、高可靠性和高實(shí)時(shí)性數(shù)據(jù)傳輸及多媒體視頻調(diào)度功能。孫繼平等[12]提出了寬帶無線通信是智慧礦山建設(shè)的基礎(chǔ)和關(guān)鍵,礦用5G具有傳輸速率高、傳輸時(shí)延小、通話質(zhì)量好等優(yōu)點(diǎn)。王國法等[13]分析了5G中的高頻通信、大規(guī)模天線陣列、超密集組網(wǎng)、設(shè)備到設(shè)備通信、網(wǎng)絡(luò)切片和移動邊緣計(jì)算6項(xiàng)關(guān)鍵技術(shù)及其特征,提出了礦山應(yīng)用5G技術(shù)的總體架構(gòu),展望了5G技術(shù)在煤礦智能化中的融合應(yīng)用。
(2) 路網(wǎng)更新技術(shù)現(xiàn)狀。露天礦路網(wǎng)更新的準(zhǔn)確性和更新周期是車輛優(yōu)化調(diào)度的基礎(chǔ),眾多學(xué)者研究利用GPS數(shù)據(jù)獲取路網(wǎng)信息。孫效玉等[14-16]針對提取露天礦路網(wǎng)路段缺失與偏移現(xiàn)象明顯等問題,提出通過求取GPS軌跡點(diǎn)在道路上的概率進(jìn)行柵格初始化的方法。
隨著無人駕駛技術(shù)的推廣應(yīng)用,道路智能化重新被提上日程。青島慧拓智能機(jī)器有限公司以安全為目標(biāo),在轉(zhuǎn)彎處設(shè)置激光雷達(dá),與卡車通信,彌補(bǔ)卡車感知的不足。未來將全方位實(shí)施車車、車路之間的實(shí)時(shí)信息交互,在全時(shí)空動態(tài)交通信息采集與融合的基礎(chǔ)上,開展車輛主動安全控制和道路協(xié)同管理將是發(fā)展趨勢。顧清華等[17]為滿足無人礦車高精度路網(wǎng)導(dǎo)航需求,提出了基于礦區(qū)道路特征的圖像互補(bǔ)方法,基于ResNet101構(gòu)建更符合露天礦道路提取的D-LinkNet101網(wǎng)絡(luò)模型,可滿足露天礦區(qū)主干路網(wǎng)智能識別和路網(wǎng)建模的精度要求。
2.2 裝備智能化技術(shù)
(1) 無人駕駛礦用卡車應(yīng)用現(xiàn)狀。露天礦卡車無人駕駛技術(shù)在國內(nèi)起步較晚,但近年來發(fā)展迅速。2018年,徐工集團(tuán)工程機(jī)械有限公司聯(lián)合青島慧拓智能機(jī)器有限公司研發(fā)了無人駕駛智能寬體自卸車[18]。該車采用X-智能控制無人駕駛技術(shù),具有循跡行駛、智能避障、運(yùn)動跟隨、自動轉(zhuǎn)彎、人機(jī)交互及感知融合等功能。
2018年8月,中國寶武鋼鐵集團(tuán)有限公司聯(lián)合北京踏歌智行科技有限公司等在白云鄂博礦區(qū)進(jìn)行了無人駕駛礦用卡車測試,目前已完成4臺無人駕駛卡車協(xié)同2臺挖掘機(jī)編組測試,與其他車輛混編運(yùn)行。2020年初,華能伊敏煤電有限責(zé)任公司伊敏露天煤礦與百度Apollo公司合作[19],對4臺純電動寬體卡車和4臺172 t自卸卡車進(jìn)行線控化改造,實(shí)現(xiàn)了無人礦卡自動編組、設(shè)備聯(lián)動作業(yè)、障礙物繞行、擋土墻路由巡跡等功能,目前已進(jìn)入動態(tài)調(diào)試階段。2020年5月,國家能源集團(tuán)寶日希勒露天煤礦與航天重型工程裝備有限公司聯(lián)合開展5G+無人駕駛示范應(yīng)用[19],對5輛220 t級礦用自卸卡車進(jìn)行無人駕駛改造,完成礦區(qū)5G獨(dú)立組網(wǎng)、極寒氣候5車編組連續(xù)運(yùn)行、全天候不間斷作業(yè)、車內(nèi)無安全員作業(yè)等建設(shè)環(huán)節(jié)。
(2) 新能源礦用卡車應(yīng)用現(xiàn)狀。目前,隨著我國“雙碳”戰(zhàn)略的提出,新能源礦用卡車的主要研究方向?yàn)榧冸妱印⒂碗娀旌虾蜌淠茉纯ㄜ嚒T谟碗娀旌虾蜌淠茉纯ㄜ嚪矫妫?018年10月,國家能源集團(tuán)氫能科技有限責(zé)任公司開展了200 t級以上氫能重載礦用卡車研發(fā),首臺國產(chǎn)200 t級以上氫燃料-鋰電池混合能源礦用卡車于2019年4月成功下線[19]。徐工集團(tuán)工程機(jī)械有限公司、湘電重型裝備有限公司等相繼開發(fā)并下線了純電動車、氫能源卡車等。總體來看,我國在油電混合、氫能源礦用卡車方面的研究較少,仍處于實(shí)驗(yàn)室研發(fā)階段,但發(fā)展速度較快。2021年,程平等[20]構(gòu)建了基于碳排放成本的露天礦新能源純電動卡車多目標(biāo)調(diào)度優(yōu)化模型,采用非支配鄰域免疫算法對模型進(jìn)行求解,提高了新能源純電動卡車的運(yùn)輸效率和碳排放量。新能源礦用卡車將是礦用卡車的發(fā)展方向之一。
(3) 帶式輸送機(jī)連續(xù)運(yùn)輸技術(shù)現(xiàn)狀。帶式輸送機(jī)連續(xù)運(yùn)輸系統(tǒng)智能化主要集中在帶式輸送機(jī)的運(yùn)行參數(shù)控制、運(yùn)行狀態(tài)監(jiān)測、機(jī)器人巡檢與維護(hù)、運(yùn)輸系統(tǒng)智能管控平臺等方面。運(yùn)行參數(shù)控制主要是通過永磁直驅(qū)電動機(jī)、永磁滾筒等變頻驅(qū)動控制技術(shù)[21],實(shí)現(xiàn)帶式輸送機(jī)平穩(wěn)啟動和制動、帶速自適應(yīng)調(diào)整、系統(tǒng)設(shè)備順序啟動等[22]。運(yùn)行狀態(tài)監(jiān)測以采用視頻圖像識別、紅外識別、振動檢測、溫度檢測、聲音識別等技術(shù)檢測帶式輸送機(jī)運(yùn)行狀態(tài)為主[23-24],為帶式輸送機(jī)運(yùn)行控制和在線檢測提供數(shù)據(jù)基礎(chǔ)。運(yùn)行參數(shù)控制與運(yùn)行狀態(tài)監(jiān)測技術(shù)已在露天礦逐步開展試驗(yàn)性應(yīng)用。機(jī)器人巡檢與維護(hù)方面,目前圖像、視頻、聲音等數(shù)據(jù)采集與處理技術(shù)不斷發(fā)展,露天礦軌道式巡檢機(jī)器人在國能準(zhǔn)格爾能源有限責(zé)任公司黑岱溝露天煤礦、國能寶日希勒能源有限公司等成功應(yīng)用。毛君等[25]、陳洪月等[26]提出了采用輸送帶托舉機(jī)械手和托輥更換機(jī)械手協(xié)同作業(yè)的托輥更換機(jī)器人技術(shù),雖未進(jìn)行工業(yè)性試驗(yàn),但這標(biāo)志著帶式輸送機(jī)機(jī)器人維護(hù)技術(shù)的研究已經(jīng)開展。聶永朝等[27]建立了基于B/S架構(gòu)的帶式輸送機(jī)智能運(yùn)維管理平臺,實(shí)現(xiàn)了帶式輸送機(jī)運(yùn)輸系統(tǒng)可控可視、實(shí)時(shí)監(jiān)測、預(yù)警報(bào)警、系統(tǒng)聯(lián)動、趨勢判研、安全節(jié)能等功能,并在國電建投內(nèi)蒙古能源有限公司察哈素煤礦主運(yùn)系統(tǒng)成功應(yīng)用。此外,帶式輸送機(jī)連續(xù)運(yùn)輸系統(tǒng)往往只在露天礦地面運(yùn)輸中應(yīng)用,難以服務(wù)于露天礦深部煤炭運(yùn)輸,因此,應(yīng)解決露天礦工作面和端幫大傾角連續(xù)運(yùn)輸問題,以便實(shí)現(xiàn)帶式輸送機(jī)連續(xù)運(yùn)輸系統(tǒng)在露天礦更大范圍的應(yīng)用。
2.3 管控智能化技術(shù)
露天礦運(yùn)輸系統(tǒng)的管控智能化技術(shù)主要是卡車智能調(diào)度系統(tǒng)(Truck Intelligent Dispatching System,TIDS)。作為生產(chǎn)過程中的管控決策大腦,TIDS在我國研究起步較晚,最初是20世紀(jì)90年代由本鋼(集團(tuán))礦業(yè)有限責(zé)任公司南芬露天鐵礦、東北工學(xué)院等聯(lián)合開發(fā)生產(chǎn)調(diào)度計(jì)算機(jī)輔助系統(tǒng)。1997年,煤炭科學(xué)研究總院撫順分院等研發(fā)了卡車調(diào)度優(yōu)化系統(tǒng)并應(yīng)用于伊敏露天煤礦[28]。之后露天礦卡車調(diào)度系統(tǒng)開始快速發(fā)展,以智能化為目標(biāo)穩(wěn)步前行,各礦山企業(yè)開始大量建立自動化調(diào)度系統(tǒng)。2018年,露天礦卡車無人駕駛和新能源礦用卡車相繼出現(xiàn),卡車智能調(diào)度系統(tǒng)隨之升級,作為礦用卡車和新能源卡車無人駕駛系統(tǒng)的決策系統(tǒng)。將無人駕駛技術(shù)與智能調(diào)度優(yōu)化技術(shù)有機(jī)結(jié)合將是今后智能化礦山建設(shè)的重要內(nèi)容。在連續(xù)工藝方面,2020年,中煤科工集團(tuán)沈陽設(shè)計(jì)研究院有限公司基于露天礦輪斗連續(xù)工藝,開發(fā)了一體化智能綜合管控平臺,有效融合輪斗、轉(zhuǎn)載機(jī)、帶式輸送機(jī)和裝車倉等的實(shí)時(shí)運(yùn)行數(shù)據(jù),打通了數(shù)據(jù)壁壘,實(shí)現(xiàn)了連續(xù)工藝無人值守、遠(yuǎn)程操控、自主運(yùn)行[29]。
2.4 維保智能化技術(shù)
露天礦維保智能化技術(shù)主要包括設(shè)備在線監(jiān)測、故障診斷及預(yù)測等。田鳳亮等[30]提出了基于自然語言的礦用卡車故障分析方法,建立了故障特征空間模型,對卡車故障信息進(jìn)行發(fā)掘與分析,為露天礦卡車故障信息分析與管理提供了新方法。白潤才等[31]提出了基于ARMA(Auto Regressive Moving Average,自回歸滑動平均)模型的露天礦卡車故障率預(yù)測方法,通過試驗(yàn)驗(yàn)證了其可行性和有效性;劉威等[32]提出了一種基于馬爾科夫蒙特卡羅方法的露天礦典型設(shè)備故障發(fā)生時(shí)間預(yù)測算法,可精確、有效地預(yù)測露天礦典型設(shè)備的故障發(fā)生時(shí)間和故障類別,為智能露天礦建設(shè)提供有效的基礎(chǔ)決策數(shù)據(jù)。毛清華等[33]設(shè)計(jì)了一種礦用帶式輸送機(jī)智能監(jiān)測系統(tǒng),基于弱磁檢測法、紅外熱成像溫度檢測法和視覺檢測法,實(shí)現(xiàn)了礦用帶式輸送機(jī)故障診斷和智能監(jiān)測等功能。
2.5 運(yùn)輸系統(tǒng)設(shè)計(jì)智能化技術(shù)
露天礦運(yùn)輸系統(tǒng)設(shè)計(jì)智能化是以智能化設(shè)計(jì)方法為手段,以提高生產(chǎn)效率為目標(biāo),進(jìn)行露天礦開拓運(yùn)輸系統(tǒng)時(shí)空演化規(guī)律分析。劉光偉等[34]以壓縮運(yùn)距、控制道路運(yùn)輸功為優(yōu)化目標(biāo),以JONG提出的城際高速公路選線方法為理論基礎(chǔ),綜合分析了運(yùn)輸系統(tǒng)道路的基本組成、結(jié)構(gòu)形態(tài)及線型特點(diǎn),建立了基于選線道路費(fèi)用成本最優(yōu)化的數(shù)值計(jì)算模型,通過試驗(yàn)驗(yàn)證了該模型對解決此類礦山選線問題可行且有效。之后,劉光偉等[35]進(jìn)一步研究了基于時(shí)空演化的露天礦運(yùn)輸線路存留狀態(tài)判別問題,提出了一種定量化描述露天采場時(shí)空狀態(tài)演化過程的方法,彌補(bǔ)了現(xiàn)階段手工定線更新路網(wǎng)的不足,同時(shí)為開拓運(yùn)輸系統(tǒng)自動優(yōu)化定線算法的實(shí)現(xiàn)提供了已匯總路徑更新判別的新思路。趙明等[36]基于3DMine軟件研究了露天礦境界優(yōu)化問題,提出了塊體價(jià)值和附加運(yùn)輸費(fèi)用計(jì)算方法,提高了境界優(yōu)化的準(zhǔn)確性和可靠性。
3 露天礦智能運(yùn)輸關(guān)鍵技術(shù)
3.1 卡車智能運(yùn)輸關(guān)鍵技術(shù)
(1) 環(huán)境感知技術(shù)。露天礦卡車環(huán)境感知技術(shù)基于無人駕駛設(shè)備傳感器布設(shè)(圖2),包括激光雷達(dá)、毫米波雷達(dá)、超聲波雷達(dá)及高清攝像頭(圖3),通過傳感器數(shù)據(jù)感知、相互融合,提供可靠的距離、速度、方向數(shù)據(jù),輔助無人駕駛車輛準(zhǔn)確感知礦山復(fù)雜環(huán)境。

圖2 無人駕駛車輛傳感器布設(shè)Fig. 2 Sensors layout on unmanned driving vehicles

圖3 露天礦環(huán)境感知傳感器Fig. 3 Environmental perception sensors in open-pit mine
傳感器標(biāo)定是無人駕駛車輛環(huán)境感知的必要環(huán)節(jié),也是傳感器數(shù)據(jù)融合的關(guān)鍵前提,其將多個(gè)傳感器交換到統(tǒng)一的時(shí)間和空間坐標(biāo)系,實(shí)現(xiàn)多傳感器融合,如激光雷達(dá)和高清攝像頭聯(lián)合標(biāo)定通過提取統(tǒng)一標(biāo)定物在單線激光雷達(dá)和圖像上的對應(yīng)點(diǎn),完成多個(gè)傳感器坐標(biāo)的統(tǒng)一,實(shí)現(xiàn)多傳感器空間校準(zhǔn),為傳感器數(shù)據(jù)融合奠定基礎(chǔ)[37]。
(2) 卡車線控改造技術(shù)。露天礦無人駕駛卡車線控改造主要是對卡車轉(zhuǎn)向系統(tǒng)、制動系統(tǒng)、舉升系統(tǒng)、液壓系統(tǒng)回路加裝控制閥組和傳感器,實(shí)現(xiàn)轉(zhuǎn)向、制動、舉升的直線比例控制、角度/位置反饋;研發(fā)無人駕駛接口控制器及卡車發(fā)動機(jī)、電控系統(tǒng)、液壓系統(tǒng)接口程序,通過CAN總線與整車控制系統(tǒng)通信,實(shí)現(xiàn)整車系統(tǒng)控制、數(shù)據(jù)反饋。卡車線控改造是實(shí)現(xiàn)車輛無人駕駛線性控制的基礎(chǔ),與傳統(tǒng)的人工駕駛模式相比,無人駕駛可有效提升露天礦現(xiàn)有礦用自卸卡車工作效率,減少安全事故發(fā)生,提高設(shè)備安全性[38]。
(3) 多目標(biāo)智能調(diào)度。露天礦車輛智能調(diào)度目標(biāo)主要包括產(chǎn)量最大、等待時(shí)間最少、出動車數(shù)最少、穩(wěn)定性最高等。各類目標(biāo)一般難以統(tǒng)一量綱,有時(shí)各目標(biāo)甚至相互沖突。
多目標(biāo)智能調(diào)度問題求解需要合適的算法。多目標(biāo)規(guī)劃是數(shù)學(xué)規(guī)劃的分支,研究多于1個(gè)目標(biāo)函數(shù)在給定區(qū)域的最優(yōu)化,又稱多目標(biāo)優(yōu)化。多目標(biāo)優(yōu)化算法分為傳統(tǒng)優(yōu)化算法和智能優(yōu)化算法兩大類。傳統(tǒng)優(yōu)化算法包括加權(quán)法、約束法等,其本質(zhì)是將多目標(biāo)函數(shù)轉(zhuǎn)換為單目標(biāo)函數(shù),通過單目標(biāo)優(yōu)化方法求解。智能優(yōu)化算法中較常見的是多目標(biāo)進(jìn)化算法,以 NSGA-Ⅱ算法最為普遍。NSGA-Ⅱ算法也稱為帶精英策略的非支配排序遺傳算法。該算法降低了非劣排序遺傳算法的復(fù)雜性,具有運(yùn)行速度快、解集收斂性好等優(yōu)點(diǎn),成為其他多目標(biāo)優(yōu)化算法性能的基準(zhǔn)。NSGA-II算法流程如圖4所示[39-41]。

圖4 NSGA-II算法流程Fig. 4 NSGA-II algorithm flow
(4) 有人-無人混編設(shè)備群智能協(xié)同技術(shù)。露天礦間斷工藝由有人駕駛向無人駕駛過渡的同時(shí),存在有人-無人混編過程。將無人駕駛技術(shù)與卡車調(diào)度系統(tǒng)、信息基礎(chǔ)設(shè)施和綜合管控平臺相結(jié)合,建立有人-無人混編設(shè)備群智能協(xié)同技術(shù)是非常必要的。在無人駕駛卡車路徑規(guī)劃過程中,根據(jù)配備的礦區(qū)高精度三維地圖及當(dāng)前車輛位置和制定的重點(diǎn)位置進(jìn)行全局行駛路徑規(guī)劃,充分利用卡車調(diào)度系統(tǒng),建立有人-無人混編設(shè)備智能管理調(diào)度系統(tǒng)[42]。通過V2X車聯(lián)網(wǎng)通信控制協(xié)議連接有人卡車、無人卡車、管控中心及其他設(shè)備,實(shí)現(xiàn)有人-無人混編設(shè)備群智能優(yōu)化動態(tài)調(diào)度,提高礦山有人、無人駕駛設(shè)備的生產(chǎn)效率。
3.2 帶式輸送機(jī)智能運(yùn)輸關(guān)鍵技術(shù)
(1) 工作面帶式輸送機(jī)自主橫移技術(shù)。輪斗連續(xù)工藝、自移式破碎機(jī)半連續(xù)工藝的生產(chǎn)效率高、能耗低、污染小,是一種安全、高效、綠色的露天礦生產(chǎn)工藝系統(tǒng)。但該類工藝系統(tǒng)面臨工作面帶式輸送機(jī)移設(shè)工作量大、耗時(shí)長、影響生產(chǎn)等問題。自主橫移式帶式輸送機(jī)將桁架式帶式輸送機(jī)與履帶行走技術(shù)相結(jié)合,可實(shí)現(xiàn)工作面帶式輸送機(jī)自主橫移,大大減小移設(shè)工程量,縮短移設(shè)時(shí)間。自主橫移式帶式輸送機(jī)沿工作面布置,長度可達(dá)2 km,履帶數(shù)量可達(dá)50組。
實(shí)現(xiàn)工作面帶式輸送機(jī)自主橫移的關(guān)鍵技術(shù)如下。
① 多履帶協(xié)同行走的控制技術(shù)。自主橫移式帶式輸送機(jī)橫移過程中,根據(jù)當(dāng)前位置和目標(biāo)位置的空間關(guān)系,通過多履帶移動路徑規(guī)劃算法生成各履帶的行走軌跡,規(guī)劃每個(gè)時(shí)間點(diǎn)各履帶的行走位置、速度和方向等運(yùn)動參數(shù)。各履帶行走過程中實(shí)時(shí)獲取履帶中心點(diǎn)的運(yùn)動參數(shù)信息,根據(jù)履帶行走誤差調(diào)整算法,實(shí)時(shí)調(diào)整各履帶行走速度與方向,實(shí)現(xiàn)各履帶協(xié)同移動。
② 多履帶行走不同步的容差技術(shù)。履帶行走機(jī)構(gòu)受傳動不同步、履帶節(jié)間隙、地面起伏不平等因素干擾,存在行走誤差。履帶行走機(jī)構(gòu)與輸送機(jī)桁架之間根據(jù)行走誤差的大小和方向釋放相應(yīng)的位移與轉(zhuǎn)角約束,吸收多履帶行走的不同步誤差,避免各履帶之間相對位置、速度、方向等隨機(jī)變化,導(dǎo)致履帶與桁架之間作用力過大而引起桁架變形等問題。該技術(shù)是自主橫移式帶式輸送機(jī)實(shí)現(xiàn)自主行走的重要安全保障。
露天礦工作面帶式輸送機(jī)移設(shè)作業(yè)時(shí)間為7~10 d,在此期間連續(xù)運(yùn)輸系統(tǒng)處于停產(chǎn)狀態(tài),對露天礦生產(chǎn)影響較大。采用工作面帶式輸送機(jī)自主橫移技術(shù)可將工作面帶式輸送機(jī)移設(shè)時(shí)間縮短50%以上,對帶式輸送機(jī)連續(xù)運(yùn)輸系統(tǒng)在露天礦的應(yīng)用具有重大意義。
(2) 自移式大傾角帶式輸送機(jī)運(yùn)輸技術(shù)。目前露天礦深部煤炭連續(xù)運(yùn)輸主要采用普通帶式輸送機(jī)沿出入溝運(yùn)輸方式。普通帶式輸送機(jī)運(yùn)輸角度小于邊坡角,難以沿端幫直接運(yùn)輸?shù)降孛妫也槐阌谝圃O(shè),嚴(yán)重制約內(nèi)排跟進(jìn)。解決該問題的關(guān)鍵在于實(shí)現(xiàn)運(yùn)輸設(shè)備的大傾角運(yùn)輸、自主移動和適應(yīng)端幫形態(tài)變化[43]。自移式大傾角帶式輸送機(jī)可實(shí)現(xiàn)沿端幫的大角度運(yùn)輸、隨內(nèi)排跟進(jìn)的快速移設(shè)、隨端幫形態(tài)變化的姿態(tài)自適應(yīng)調(diào)整等功能,成為露天礦深部煤炭高效連續(xù)出坑運(yùn)輸?shù)淖顑?yōu)解決方案。
① 大傾角連續(xù)運(yùn)輸技術(shù)。露天礦端幫角度一般為20~40°,普通帶式輸送機(jī)難以沿端幫表面連續(xù)運(yùn)輸。自移式大傾角帶式輸送機(jī)宜采用壓帶帶式輸送機(jī),通過覆蓋帶覆蓋物料施加壓力來保持物料不下滑,實(shí)現(xiàn)物料大傾角連續(xù)運(yùn)輸。承載帶和覆蓋帶采用變頻電動機(jī)驅(qū)動,以承載帶的驅(qū)動電動機(jī)為主驅(qū),覆蓋帶驅(qū)動電動機(jī)為從驅(qū),實(shí)時(shí)調(diào)節(jié)各電動機(jī)的輸出力矩和轉(zhuǎn)速,使承載帶和覆蓋帶保持同步運(yùn)轉(zhuǎn),保證壓帶帶式輸送機(jī)穩(wěn)定運(yùn)行。
② 多履帶協(xié)同移動技術(shù)。自移式大傾角帶式輸送機(jī)采用多履帶行走的大跨度桁架式帶式輸送機(jī)結(jié)構(gòu)實(shí)現(xiàn)設(shè)備快速移動。履帶行走機(jī)構(gòu)受鏈節(jié)間隙、整機(jī)慣性、地面平整度等影響,移動位置、速度和方向誤差大,難以精準(zhǔn)控制。多履帶協(xié)同移動控制系統(tǒng)實(shí)時(shí)獲取履帶中心的位置信息,結(jié)合設(shè)備行走過程中的位姿變化,分析履帶行走位置誤差,實(shí)時(shí)調(diào)整履帶行走速度和方向,實(shí)現(xiàn)多履帶協(xié)同移動。同時(shí),在履帶和桁架之間建立鉸接副、滑動副等自由度釋放機(jī)構(gòu),實(shí)時(shí)吸收多履帶之間的相對位置、速度和方向誤差,保證設(shè)備靈活移動和結(jié)構(gòu)安全。
③ 自適應(yīng)姿態(tài)調(diào)整技術(shù)。受煤巖賦存條件影響,露天礦端幫形態(tài)隨工作面推進(jìn)不斷變化,具有高度隨機(jī)性。自移式大傾角帶式輸送機(jī)應(yīng)用自適應(yīng)俯仰、橫向調(diào)平、多履帶行走容差等姿態(tài)自適應(yīng)調(diào)整技術(shù),實(shí)現(xiàn)沿形態(tài)隨機(jī)變化的端幫自主自適應(yīng)行走。
自移式大傾角帶式輸送機(jī)運(yùn)輸技術(shù)避免了帶式輸送機(jī)連續(xù)運(yùn)輸系統(tǒng)坑內(nèi)到地面段運(yùn)輸對內(nèi)排、邊坡和剝離卡車運(yùn)輸?shù)挠绊懀垢咝У倪B續(xù)運(yùn)輸系統(tǒng)服務(wù)露天礦深部煤炭運(yùn)輸成為可能。該技術(shù)與露天礦廣泛采用的卡車運(yùn)輸出坑方式相比,運(yùn)輸距離縮短80%以上。
(3) 帶式輸送機(jī)運(yùn)行控制技術(shù)。帶式輸送機(jī)運(yùn)行面臨啟動動態(tài)效應(yīng)引起的沖擊載荷影響設(shè)備使用壽命、小煤量工況工頻運(yùn)行能耗高、逆煤流啟動設(shè)備空轉(zhuǎn)待機(jī)時(shí)間長等問題。解決上述問題的關(guān)鍵技術(shù)如下。
① 帶式輸送機(jī)平穩(wěn)啟停控制技術(shù)。帶式輸送機(jī)采用變頻電動機(jī)、永磁變頻電動機(jī)、永磁滾筒等轉(zhuǎn)矩和速度可控的驅(qū)動形式,變頻器根據(jù)帶式輸送機(jī)啟動或制動曲線調(diào)整驅(qū)動的供電頻率,實(shí)現(xiàn)帶式輸送機(jī)啟動和停機(jī)時(shí)速度和加速度的實(shí)時(shí)精確控制,配合自動張緊智能控制技術(shù),實(shí)現(xiàn)帶式輸送機(jī)平穩(wěn)啟動和停機(jī),有效消減輸送帶的動態(tài)張力,降低輸送帶、電動機(jī)、減速機(jī)、滾筒等關(guān)鍵部件的啟動沖擊,延長部件壽命。
② 帶式輸送機(jī)自適應(yīng)調(diào)速技術(shù)。帶式輸送機(jī)自適應(yīng)調(diào)速是根據(jù)輸送煤量的變化自主調(diào)整帶速,以降低運(yùn)行能耗的控制方法。精準(zhǔn)識別煤量是帶式輸送機(jī)自適應(yīng)調(diào)速的基礎(chǔ)。煤量識別技術(shù)主要包括電子膠帶秤、核子膠帶秤等傳統(tǒng)測量方法,以及激光掃描、視頻識別、雙目視覺等新型方法。帶式輸送機(jī)自適應(yīng)調(diào)速系統(tǒng)基于煤量識別數(shù)據(jù),實(shí)時(shí)計(jì)算最優(yōu)帶速,根據(jù)帶速調(diào)整策略,調(diào)整變頻器輸出頻率,控制輸送帶運(yùn)行速度[44],實(shí)現(xiàn)“煤多快運(yùn),煤少慢運(yùn)”,提高帶式輸送機(jī)運(yùn)載效率,平衡各驅(qū)動電動機(jī)功率,達(dá)到節(jié)能減排、降低損耗、延長設(shè)備壽命的多重效果。
③ 帶式輸送機(jī)系統(tǒng)順料流啟動控制技術(shù)。帶式輸送機(jī)系統(tǒng)順料流啟動控制是通過視頻圖像識別技術(shù)監(jiān)視物料在系統(tǒng)中的位置,預(yù)判料流到達(dá)下游帶式輸送機(jī)的時(shí)間,結(jié)合下游帶式輸送機(jī)啟動用時(shí),確定下游帶式輸送機(jī)的合理啟動時(shí)間點(diǎn),實(shí)現(xiàn)料流到達(dá)下游帶式輸送機(jī)的同時(shí),下游帶式輸送機(jī)滿速運(yùn)行,減少帶式輸送機(jī)空轉(zhuǎn)運(yùn)行時(shí)間,縮短系統(tǒng)啟動到正常帶料的過渡期,達(dá)到節(jié)約系統(tǒng)能耗、降低帶式輸送機(jī)損耗的目的[44]。
帶式輸送機(jī)運(yùn)行智能控制技術(shù)可根據(jù)工況將帶式輸送機(jī)運(yùn)行參數(shù)調(diào)整至最佳狀態(tài),減少不必要的沖擊和磨損,延長部件壽命,節(jié)省電能消耗。
(4) 帶式輸送機(jī)狀態(tài)在線檢測技術(shù)。實(shí)時(shí)監(jiān)測電動機(jī)、減速器、滾筒、托輥、輸送帶等主要運(yùn)轉(zhuǎn)部件的運(yùn)行狀態(tài),實(shí)現(xiàn)故障提前預(yù)測與及時(shí)維護(hù),是帶式輸送機(jī)可靠安全運(yùn)行的基本保障。
① 輸送帶鋼絲繩芯在線損傷檢測技術(shù)。主要分為X射線和電磁式。X射線在線損傷檢測技術(shù)通過X射線掃描并獲取輸送帶圖像,并將采集圖像傳輸至遠(yuǎn)程上位機(jī)進(jìn)行智能分析處理,實(shí)現(xiàn)輸送帶內(nèi)鋼絲繩接頭抽動、斷頭等缺陷的自動識別功能[45]。其系統(tǒng)組成如圖5所示。電磁式在線損傷檢測技術(shù)采用磁加載模塊對輸送帶進(jìn)行磁化,實(shí)時(shí)采集輸送帶內(nèi)部損傷信號,對損傷信號進(jìn)行降噪處理和特征提取,實(shí)現(xiàn)輸送帶鋼絲繩芯損傷智能識別。
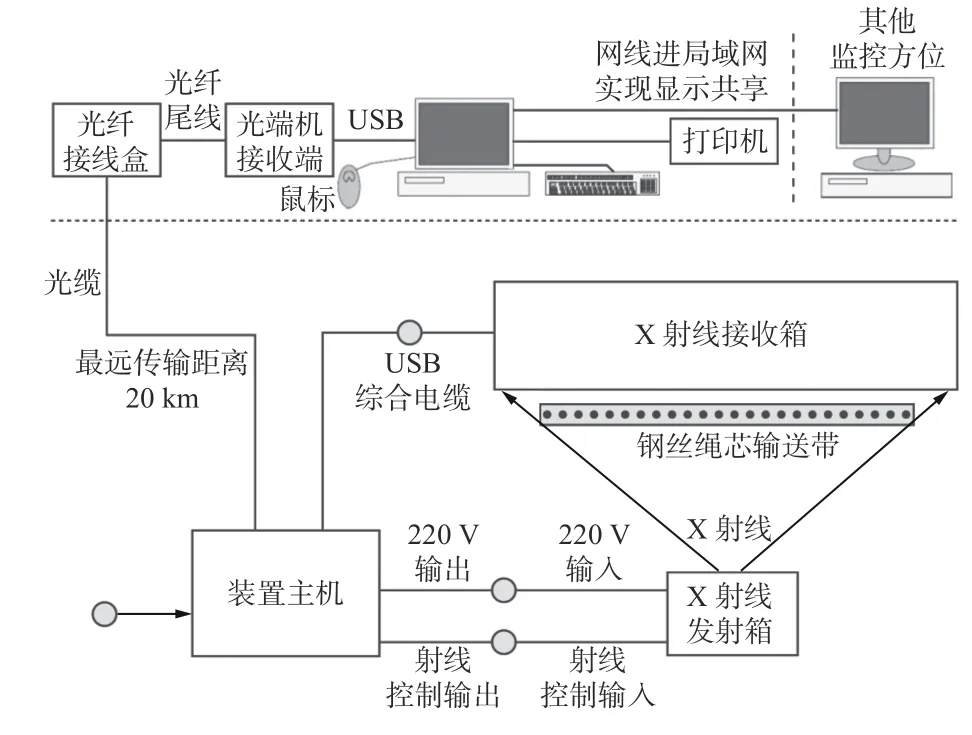
圖5 輸送帶鋼絲繩芯X射線在線損傷檢測系統(tǒng)組成Fig. 5 Composition of on-line damage detection system of steel core belt based on X-ray
② 帶式輸送機(jī)智能點(diǎn)檢技術(shù)。在帶式輸送機(jī)電動機(jī)、減速機(jī)、滾筒等關(guān)鍵部位安裝無線溫度和振動傳感器,檢測設(shè)備振動、溫度等異常運(yùn)行狀態(tài)數(shù)據(jù),經(jīng)無線基站接入上位機(jī)監(jiān)控系統(tǒng),通過數(shù)據(jù)采集單元和組態(tài)監(jiān)控畫面實(shí)現(xiàn)遠(yuǎn)程點(diǎn)檢和記錄。發(fā)生異常時(shí)可分級報(bào)警,發(fā)出停止帶式輸送機(jī)運(yùn)轉(zhuǎn)命令,并在組態(tài)監(jiān)控畫面中顯示故障信息,同時(shí)發(fā)出語音報(bào)警[46]。
③ 帶式輸送機(jī)故障診斷技術(shù)。主要包括數(shù)據(jù)采集、數(shù)據(jù)融合、數(shù)據(jù)分析、知識庫、模型庫等模塊。該技術(shù)將在線傳感器獲取的各項(xiàng)數(shù)據(jù)進(jìn)行融合,經(jīng)數(shù)據(jù)推理分析提取故障特征,并與模型庫中的故障模型進(jìn)行自動匹配,從而獲取故障類型,經(jīng)相似度檢索及推理后,生成故障決策診斷結(jié)果[47],如圖6所示。

圖6 帶式輸送機(jī)故障信息處理流程Fig. 6 Fault information process flow of belt conveyor
帶式輸送機(jī)狀態(tài)在線檢測技術(shù)可更加全面地檢測帶式輸送機(jī)運(yùn)行狀態(tài),實(shí)現(xiàn)帶式輸送機(jī)故障早期預(yù)警,減少故障停機(jī)的發(fā)生率,提升設(shè)備維護(hù)的及時(shí)性,從而保障帶式輸送機(jī)安全運(yùn)行。
(5) 帶式輸送機(jī)智能巡檢技術(shù)。帶式輸送機(jī)常見運(yùn)行故障包括托輥損壞、軸承溫度異常、輸送帶跑偏、轉(zhuǎn)載點(diǎn)堵料、輸送帶撕裂、輸送帶斷帶等。傳統(tǒng)方式以人工巡檢為主、視頻監(jiān)控為輔。人工巡檢工作量大、效率低,且難以及時(shí)發(fā)現(xiàn)早期故障。視頻監(jiān)控?cái)z像頭難以實(shí)現(xiàn)帶式輸送機(jī)全線覆蓋,且需要人工觀察分析視頻圖像,判斷是否出現(xiàn)故障。帶式輸送機(jī)智能巡檢技術(shù)主要采用搭載圖像、紅外、聲音、粉塵、煙霧等傳感器的機(jī)器人沿帶式輸送機(jī)線路往復(fù)巡檢,對帶式輸送機(jī)沿線運(yùn)行狀態(tài)進(jìn)行檢測、分析與報(bào)警。其關(guān)鍵技術(shù)主要集中在以下4個(gè)方面。
① 高清攝像與視頻分析技術(shù)。高清攝像頭對帶式輸送機(jī)沿線進(jìn)行實(shí)時(shí)觀測和錄像,通過視頻識別分析技術(shù),實(shí)現(xiàn)對輸送帶跑偏、托輥卡滯、人員闖入等異常情況報(bào)警功能。
② 熱成像與溫度監(jiān)控技術(shù)。熱成像儀實(shí)時(shí)捕捉設(shè)備輻射的熱紅外線,對巡檢機(jī)器人視野范圍內(nèi)的帶式輸送機(jī)部件進(jìn)行紅外熱成像,將部件的溫度分布實(shí)時(shí)顯示在監(jiān)控畫面中,并自動識別高溫部件及其位置,及時(shí)發(fā)現(xiàn)早期設(shè)備故障產(chǎn)生的發(fā)熱現(xiàn)象,實(shí)現(xiàn)故障預(yù)警。
③ 聲音收集與異音識別技術(shù)。麥克風(fēng)陣列實(shí)時(shí)采集帶式輸送機(jī)運(yùn)行現(xiàn)場聲音,通過與標(biāo)準(zhǔn)系列庫中的聲音進(jìn)行匹配和對比,判斷托輥、滾筒等轉(zhuǎn)動部件的異常狀態(tài),可實(shí)現(xiàn)故障早期預(yù)警。
④ 煙霧及粉塵傳感器。煙霧傳感器主要檢測帶式輸送機(jī)沿線環(huán)境中的煙霧濃度,與設(shè)定值實(shí)時(shí)對比,超限時(shí)預(yù)警,防止火災(zāi)事故發(fā)生。粉塵傳感器檢測帶式輸送機(jī)沿線尤其是轉(zhuǎn)載點(diǎn)空間內(nèi)的粉塵濃度,實(shí)現(xiàn)超限預(yù)警。
受環(huán)境、振動、樣本庫等影響,巡檢機(jī)器人對故障檢測的準(zhǔn)確率尚不能達(dá)到100%,但已經(jīng)可以取代人工巡檢的大部分工作,同時(shí)能完成人工難以巡檢部位的檢測及故障預(yù)測等功能,進(jìn)一步提高了帶式輸送機(jī)運(yùn)行狀態(tài)監(jiān)測水平。隨著巡檢機(jī)器人各項(xiàng)檢測準(zhǔn)確率的不斷提高,帶式輸送機(jī)巡檢工作將逐步實(shí)現(xiàn)無人化。
(6) 帶式輸送機(jī)無人化維護(hù)技術(shù)。帶式輸送機(jī)日常維護(hù)工作包括托輥更換、旋轉(zhuǎn)部件注油、輸送帶調(diào)偏、拉緊調(diào)整、刮刀更換、導(dǎo)料槽橡膠更換、輸送帶修補(bǔ)、輸送帶更換、緊固件擰緊、設(shè)備上煤塵及異物清理等,設(shè)備維護(hù)工作種類繁多,工作流程各不相同,難以實(shí)現(xiàn)完全無人化智能維護(hù)。托輥數(shù)量多,故障更換頻次高,是帶式輸送機(jī)無人化維護(hù)首要解決的問題。托輥更換機(jī)器人以托舉機(jī)械手與更換機(jī)械手協(xié)同配合方式實(shí)現(xiàn)托輥更換。托舉機(jī)械手主要是將輸送帶與托輥分離,為托輥更換創(chuàng)造空間。受帶式輸送機(jī)輸送帶下空間的限制,托舉機(jī)械手宜采用小巧緊湊的托架結(jié)構(gòu),伸入輸送帶下方后支承底座應(yīng)精準(zhǔn)定位到輸送機(jī)架上,借助輸送機(jī)架的支承頂升輸送帶,實(shí)現(xiàn)輸送帶與托輥分離。更換機(jī)械手應(yīng)根據(jù)托輥故障報(bào)警信息精確定位托輥位置,自動調(diào)整托輥更換機(jī)械手位姿,精準(zhǔn)拆卸損壞的托輥放入托輥庫,并取出新托輥完成托輥安裝。帶式輸送機(jī)無人化維護(hù)技術(shù)尚處于開發(fā)探索階段,尚未實(shí)現(xiàn)應(yīng)用。隨著研究的不斷深入,除實(shí)現(xiàn)托輥?zhàn)詣痈鼡Q以外,帶式輸送機(jī)維檢機(jī)器人還可配備注油脂機(jī)械手、調(diào)偏機(jī)械手等,實(shí)現(xiàn)一機(jī)多用,擴(kuò)展帶式輸送機(jī)維檢機(jī)器人的工作內(nèi)容,進(jìn)一步減少帶式輸送機(jī)維修人員的工作強(qiáng)度和人員數(shù)量。
(7) 帶式輸送機(jī)運(yùn)輸系統(tǒng)智能管控平臺。帶式輸送機(jī)運(yùn)輸系統(tǒng)智能管控平臺以運(yùn)輸系統(tǒng)生產(chǎn)、運(yùn)營、維護(hù)端為業(yè)務(wù)域,進(jìn)行運(yùn)輸系統(tǒng)裝備智能運(yùn)維服務(wù),對運(yùn)輸系統(tǒng)裝備進(jìn)行運(yùn)行狀態(tài)監(jiān)測、故障診斷、預(yù)防性維護(hù)、遠(yuǎn)程維護(hù)、維修決策、優(yōu)化運(yùn)行、庫存優(yōu)化、精準(zhǔn)采購和技術(shù)服務(wù)等。通過收集裝備設(shè)計(jì)資料、試驗(yàn)數(shù)據(jù)、使用記錄、故障信息、實(shí)時(shí)數(shù)據(jù)等,構(gòu)建基于小樣本數(shù)據(jù)的融合經(jīng)驗(yàn)公式、機(jī)理模型、動態(tài)模型的性能可靠性計(jì)算與評估方法,并應(yīng)用于帶式輸送機(jī)運(yùn)輸系統(tǒng)裝備。其核心關(guān)鍵技術(shù)如下。
① 海量數(shù)據(jù)存儲與計(jì)算。帶式輸送機(jī)運(yùn)輸系統(tǒng)智能管控平臺應(yīng)解決高并發(fā)、高時(shí)效和多場景數(shù)據(jù)應(yīng)用問題,實(shí)現(xiàn)結(jié)構(gòu)化、非結(jié)構(gòu)化和半結(jié)構(gòu)化的多維異構(gòu)海量數(shù)據(jù)統(tǒng)一存儲和查詢。
② 微服務(wù)架構(gòu)集成。平臺集成微服務(wù)架構(gòu)實(shí)現(xiàn)算法工具、分析工具、業(yè)務(wù)應(yīng)用、APP等的快速靈活接入;建成復(fù)雜事件處理引擎,用于文本挖掘、知識本體構(gòu)建、知識發(fā)現(xiàn)與推理;集成開源人工智能算法框,用于數(shù)據(jù)分析與挖掘建模;支持微服務(wù)的彈性擴(kuò)展,具有分權(quán)限管理、負(fù)載均衡、防火墻等功能。
③ 大數(shù)據(jù)分析及預(yù)測。在數(shù)據(jù)分析引擎、設(shè)備機(jī)理大數(shù)據(jù)分析基礎(chǔ)上,分析潛在因子關(guān)聯(lián),建立數(shù)理模型來量化失效模式,實(shí)現(xiàn)故障診斷與壽命預(yù)測等預(yù)測性維護(hù)[48]。
帶式輸送機(jī)運(yùn)輸系統(tǒng)智能管控平臺是露天礦帶式輸送機(jī)連續(xù)運(yùn)輸系統(tǒng)發(fā)展的必然需求,通過大數(shù)據(jù)、云平臺、在線檢測、故障診斷、智能運(yùn)維、數(shù)字孿生等技術(shù)與裝備的應(yīng)用,實(shí)現(xiàn)露天礦帶式輸送機(jī)連續(xù)運(yùn)輸系統(tǒng)的高效協(xié)同,全面提升帶式輸送機(jī)連續(xù)運(yùn)輸系統(tǒng)的智能化水平。
4 露天礦智能運(yùn)輸發(fā)展趨勢
4.1 連續(xù)化
露天礦開采工藝將逐步從間斷工藝向連續(xù)、半連續(xù)工藝轉(zhuǎn)變。卡車間斷工藝靈活性好,在露天礦應(yīng)用廣泛,但存在能耗高、效率低、污染大等問題。隨著露天礦開采深度不斷增加,卡車在邊幫折返運(yùn)輸煤炭出坑的運(yùn)輸距離顯著增加,卡車運(yùn)輸效率和環(huán)保等問題更加凸顯,成為制約露天礦高質(zhì)量發(fā)展的重要因素之一。以帶式輸送機(jī)為核心運(yùn)輸設(shè)備的露天礦連續(xù)、半連續(xù)運(yùn)輸工藝系統(tǒng)具有效率高、能耗低、污染小等優(yōu)點(diǎn),但存在靈活性差的缺點(diǎn),難以在露天礦運(yùn)輸領(lǐng)域廣泛應(yīng)用。隨著工作面帶式輸送機(jī)自主橫移、自移式大傾角帶式輸送機(jī)運(yùn)輸?shù)燃夹g(shù)的發(fā)展,帶式輸送機(jī)運(yùn)輸?shù)撵`活性大幅提高,工作面帶式輸送機(jī)移設(shè)慢制約工作面和內(nèi)排推進(jìn)、端幫大傾角連續(xù)運(yùn)輸制約內(nèi)排阻斷卡車運(yùn)輸?shù)缆返葐栴}得以有效解決,采用連續(xù)、半連續(xù)工藝系統(tǒng)將深部煤炭向地面運(yùn)輸成為可能,因此,露天礦輪斗連續(xù)開采工藝、單斗自移式破碎機(jī)半連續(xù)開采工藝系統(tǒng)將逐步演變?yōu)槁短斓V主要開采運(yùn)輸工藝,帶式輸送機(jī)連續(xù)運(yùn)輸方式將逐步替代卡車運(yùn)輸,成為露天礦主要運(yùn)輸方式。
4.2 無人化
無人化智能運(yùn)輸可有效解決露天礦面臨的工人勞動強(qiáng)度大、招工難等問題,還能有效避免人為因素對露天礦生產(chǎn)的干擾,降低生產(chǎn)的偶然性。無人化是露天礦智能化建設(shè)的主要發(fā)展方向之一。露天礦運(yùn)輸系統(tǒng)的無人化建設(shè)主要沿卡車無人駕駛和帶式輸送機(jī)連續(xù)運(yùn)輸2個(gè)方向同步發(fā)展:卡車無人駕駛以卡車線控改造為主,以卡車環(huán)境感知、智能調(diào)度系統(tǒng)、設(shè)備智能協(xié)同等技術(shù)為基礎(chǔ),逐步實(shí)現(xiàn)卡車無人駕駛常態(tài)化運(yùn)行;帶式輸送機(jī)連續(xù)運(yùn)輸系統(tǒng)以智能巡檢、在線狀態(tài)監(jiān)測、自主運(yùn)維及智能管控平臺等技術(shù)為依托,逐步實(shí)現(xiàn)連續(xù)運(yùn)輸系統(tǒng)的無人化運(yùn)行。
4.3 低碳化
隨著“雙碳”政策的逐步實(shí)施,低碳化將成為露天礦高質(zhì)量發(fā)展的重要方向。露天礦運(yùn)輸系統(tǒng)是露天礦生產(chǎn)的主要能量消耗環(huán)節(jié),減少運(yùn)輸系統(tǒng)的碳排放對露天礦實(shí)現(xiàn)“雙碳”目標(biāo)意義重大。露天礦卡車運(yùn)輸主要以柴油為動力,能量轉(zhuǎn)化率低,且碳排放高,環(huán)境污染大。未來卡車將逐步發(fā)展電力驅(qū)動和氫動力驅(qū)動技術(shù),全面替代柴油動力卡車,實(shí)現(xiàn)卡車運(yùn)輸系統(tǒng)的低碳化運(yùn)行。此外,隨著帶式輸送機(jī)連續(xù)運(yùn)輸系統(tǒng)逐步推廣應(yīng)用,電力驅(qū)動的連續(xù)運(yùn)輸系統(tǒng)將替代大部分卡車運(yùn)輸,實(shí)現(xiàn)露天礦高效、綠色、低碳運(yùn)輸。未來柴油動力設(shè)備將逐步退出露天礦,露天礦必將發(fā)展出以電力驅(qū)動、氫動力驅(qū)動卡車及電力驅(qū)動帶式輸送機(jī)為核心裝備的清潔能源低碳運(yùn)輸系統(tǒng)。
4.4 高效協(xié)同
高效協(xié)同是露天礦運(yùn)輸系統(tǒng)智能化、無人化發(fā)展的必然要求,是露天礦實(shí)現(xiàn)提質(zhì)增效的重要保證。隨著智能化建設(shè)的逐步深入,露天礦將逐步進(jìn)入少人化和無人化生產(chǎn)階段。人在露天礦生產(chǎn)中的決策指揮等作用將逐步由智能管控平臺替代,這一方面降低了人隨機(jī)干預(yù)的不確定性,另一方面給露天礦運(yùn)輸設(shè)備提出了自主高效協(xié)同作業(yè)要求。智能管控平臺在綜合分析全礦生產(chǎn)數(shù)據(jù)的前提下,向運(yùn)輸設(shè)備發(fā)布作業(yè)指令,各運(yùn)輸設(shè)備在執(zhí)行智能管控平臺作業(yè)指令的同時(shí)進(jìn)行交互通信,在智能管控平臺的統(tǒng)一部署下進(jìn)行高效自主協(xié)同作業(yè),全面提升運(yùn)輸系統(tǒng)作業(yè)效率。
4.5 本質(zhì)安全
安全是露天礦發(fā)展的根本前提,也是露天礦智能化建設(shè)的基本要求。露天礦ITS將逐步實(shí)現(xiàn)少人化運(yùn)行,最終實(shí)現(xiàn)無人化運(yùn)行,這在本質(zhì)上解決了露天礦生產(chǎn)人員安全問題。同時(shí),隨著設(shè)備智能巡檢、在線監(jiān)測、運(yùn)行狀態(tài)分析、智能運(yùn)行等技術(shù)的發(fā)展,設(shè)備故障預(yù)警全面性和準(zhǔn)確性將不斷提高,設(shè)備運(yùn)行故障得到有效控制,運(yùn)輸系統(tǒng)的可靠性和安全性全面提升。
5 結(jié)論
(1) 露天礦ITS是在滿足安全生產(chǎn)的前提下,以智能化運(yùn)輸裝備為載體,將數(shù)字技術(shù)與智能化應(yīng)用場景深度融合,建立的實(shí)時(shí)、準(zhǔn)確、高效的運(yùn)輸綜合管理系統(tǒng)。
(2) 露天礦智能運(yùn)輸技術(shù)主要體現(xiàn)在網(wǎng)絡(luò)布設(shè)、路網(wǎng)更新、無人駕駛卡車、新能源卡車、帶式輸送機(jī)連續(xù)運(yùn)輸、管控、維保、設(shè)計(jì)等方面。
(3) 露天礦卡車運(yùn)輸系統(tǒng)的智能化關(guān)鍵技術(shù)主要包括礦山復(fù)雜路況的環(huán)境感知技術(shù)、無人駕駛卡車線控改造技術(shù)、多目標(biāo)智能調(diào)度技術(shù)、有人-無人混編設(shè)備群智能協(xié)同技術(shù)等。目前仍存在網(wǎng)絡(luò)覆蓋不全、無人礦用卡車效率低、新能源卡車電池性能有限等問題,亟需實(shí)現(xiàn)技術(shù)突破。
(4) 露天礦帶式輸送機(jī)連續(xù)運(yùn)輸系統(tǒng)智能化關(guān)鍵技術(shù)主要包括工作面帶式輸送機(jī)自主橫移技術(shù)、自移式大傾角帶式輸送機(jī)運(yùn)輸技術(shù)、帶式輸送機(jī)運(yùn)行控制技術(shù)、帶式輸送機(jī)狀態(tài)在線檢測技術(shù)、帶式輸送機(jī)智能巡檢技術(shù)、帶式輸送機(jī)無人化維護(hù)技術(shù)、帶式輸送機(jī)運(yùn)輸系統(tǒng)智能管控平臺等。帶式輸送機(jī)運(yùn)輸系統(tǒng)的適應(yīng)性、帶式輸送機(jī)在線檢測與故障預(yù)警準(zhǔn)確性、設(shè)備智能維護(hù)全面性、連續(xù)運(yùn)輸系統(tǒng)的智能管控平臺等有待進(jìn)一步完善。
(5) 從煤炭工業(yè)高質(zhì)量發(fā)展對露天礦提出的要求分析,連續(xù)化、無人化、低碳化、高效協(xié)同和本質(zhì)安全是露天礦智能運(yùn)輸技術(shù)發(fā)展的必然趨勢。
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學(xué)科學(xué)(學(xué)生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(shù)(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44