煤礦井下網聯式自動駕駛技術研究
2022-07-07 17:13:44李晨鑫張立亞
工礦自動化 2022年6期
李晨鑫, 張立亞
(1. 煤炭科學技術研究院有限公司,北京 100013;2. 煤礦應急避險技術裝備工程研究中心,北京 100013;3. 北京市煤礦安全工程技術研究中心,北京 100013)
0 引言
近年來,我國煤礦安全生產形勢不斷好轉,隨著煤礦智能化技術的不斷發展,煤礦“機械化換人、自動化減人”專項計劃有效推動落實,采煤工作面和掘進工作面遠程控制、煤礦井下車輛無人駕駛遠程控制等自動化采掘技術、智能化輔助運輸技術成為不斷推動各項技術裝備部署、積極落實減人目標的具體技術手段[1-3]。目前工作面遠程控制等自動化采掘技術應用較多,減人效果顯著,而智能化輔助運輸技術仍有待開展系統性研究和應用。煤礦井下輔助運輸承擔著設備、材料、人員的運輸任務,是煤礦井下生產建設的重要保障環節,根據統計,我國煤礦井下輔助運輸作業人員占煤礦井下人員的1/3以上[4]。因此,研究煤礦井下自動駕駛技術、實現無人化運輸,對于支撐“機械化換人、自動化減人”具有重要意義,能夠為煤礦井下全面無人化生產與管理打下良好基礎[5]。
當前在地面交通領域中,C-V2X(Cellular-Vehicle to Everything,蜂窩車聯網)、5G等通信技術及人工智能技術的快速發展,有力推動了自動駕駛和智能網聯汽車的發展。國內外主流車企先后規劃了L3級以上自動駕駛車輛的實施方案。自動駕駛具有高度安全性和高度可靠性要求,只有通過C-V2X等網聯化技術建立V2V(車與車)、V2I(車與路側設備)、V2P(車與人)、V2N(車與網絡)的低時延、高可靠信息傳輸通道,通過多維度、全方面的感知信息共享和協同控制調度,與車輛自身感知能力融合互補,才能滿足自動駕駛的高度安全性和高度可靠性需求,因此,網聯化的協同式自動駕駛成為國內外自動駕駛發展模式的主流技術路線。
現階段,自動駕駛在露天煤礦的應用具有一定的研究基礎,由于露天煤礦場景相對封閉,礦卡駕駛路線固定,行駛速度較低,且露天煤礦場地開闊,GNSS(Global Navigation Satellite System,全球衛星導航系統)信號和無線通信信號傳輸環境均較為優越,實現自動駕駛的技術難度相對較低。集成GNSS RTK(Real Time Kinematic,實時動態)定位、激光+視覺+毫米波感知、融合信息處理與決策規劃、5G+C-V2X等技術的無人礦卡已在中煤平朔集團有限公司、 華能伊敏煤電有限責任公司、紫金礦業集團青海有限公司果洛礦區、國家能源集團神華寶日希勒能源有限公司露天煤礦等現場開展了應用[6]。
井工煤礦運輸環境與露天煤礦差異顯著,目前公開研究成果相對較少。煤礦井下無GNSS信號覆蓋,需要解決高精定位問題。巷道中照度低、遮擋物與障礙物較多、煤塵粉塵普遍存在等因素均會對單車感知產生不利影響。同時,出于安全管控和提升生產效率的需要,煤礦井下運輸車輛既需要單車的自動運行,又需要統一協調調度車輛的整體運行情況,實現“人-車-巷-云”協同控制。
本文系統梳理了地面交通領域的自動駕駛技術發展現狀和技術特點,分析了煤礦井下環境對井下自動駕駛技術應用的影響,指出了煤礦井下自動駕駛研究的關鍵技術,構建了適用于井下網聯式自動駕駛系統參考架構,介紹了井下網聯式自動駕駛技術演進和發展路徑。
1 煤礦井下自動駕駛關鍵技術
地面交通領域自動駕駛技術經過長期研究和試驗,學術界、產業界已對技術路線形成一致共識,即基于智能化和網聯化技術融合實現高等級自動駕駛(L4和L5),滿足極高的安全性和可靠性要求[7]。煤礦井下自動駕駛需要面臨安全生產和車輛安全運行的雙重嚴苛要求,同樣需要基于智能化和網聯化技術融合互補確保高度的安全性。本節首先分析地面交通領域自動駕駛智能化和網聯化技術的發展現狀及技術特點,結合煤礦現場的實際需求,系統分析并指出智能化、網聯化技術在煤礦井下應用的優勢和關鍵技術問題。
1.1 地面自動駕駛智能化技術與網聯化技術
智能化技術包括感知定位技術、決策規劃技術、控制執行技術。
感知定位技術基本原理如圖1所示,基于激光雷達、毫米波雷達、攝像頭等對道路實際環境進行實時精確感知,結合GNSS高精定位信息,與預先制作的高精地圖進行語義級特征匹配,確定自動駕駛汽車自身位置及周邊物體(障礙物)位置[8]。
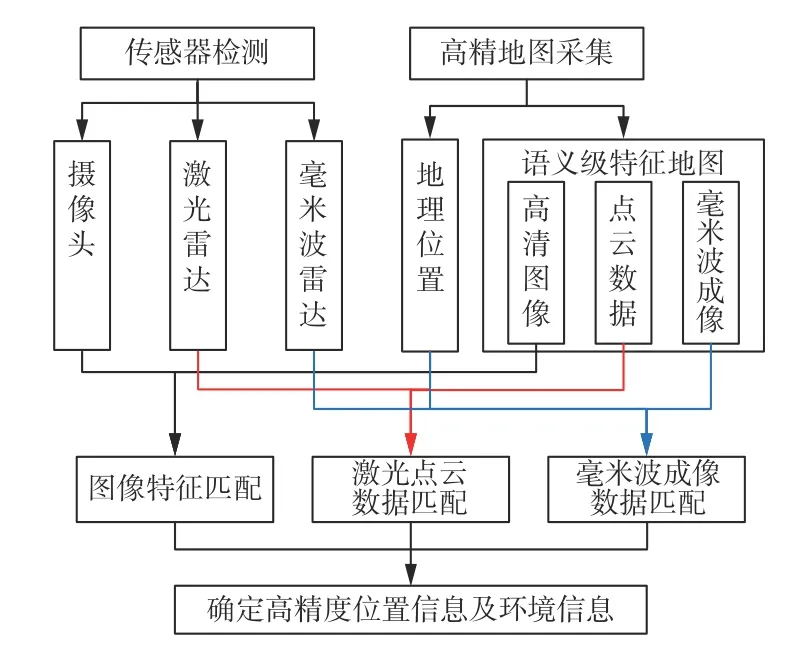
圖1 自動駕駛感知定位技術基本原理Fig. 1 Basic principle of perception positioning technology of automatic driving
決策規劃技術包括行為決策、路徑規劃、軌跡規劃等技術,用于確定車輛運行策略。
控制執行技術主要是通過執行車輛的動力學控制技術實現對車輛的控制,支持車輛運行策略的實現。
網聯化技術通過C-V2X的PC5直連通信接口實現V2V、V2I、V2P通信,通過Uu接口蜂窩通信實現V2N通信[9],建立人-車-路-網絡之間低時延、高可靠信息傳輸通道,實現多維度、全方面的感知信息共享和協同調度控制,彌補車輛傳感器感知盲區等不足。C-V2X技術的兩類通信接口如圖2所示,其中Uu接口是針對車聯網需求增強的4G/5G技術。
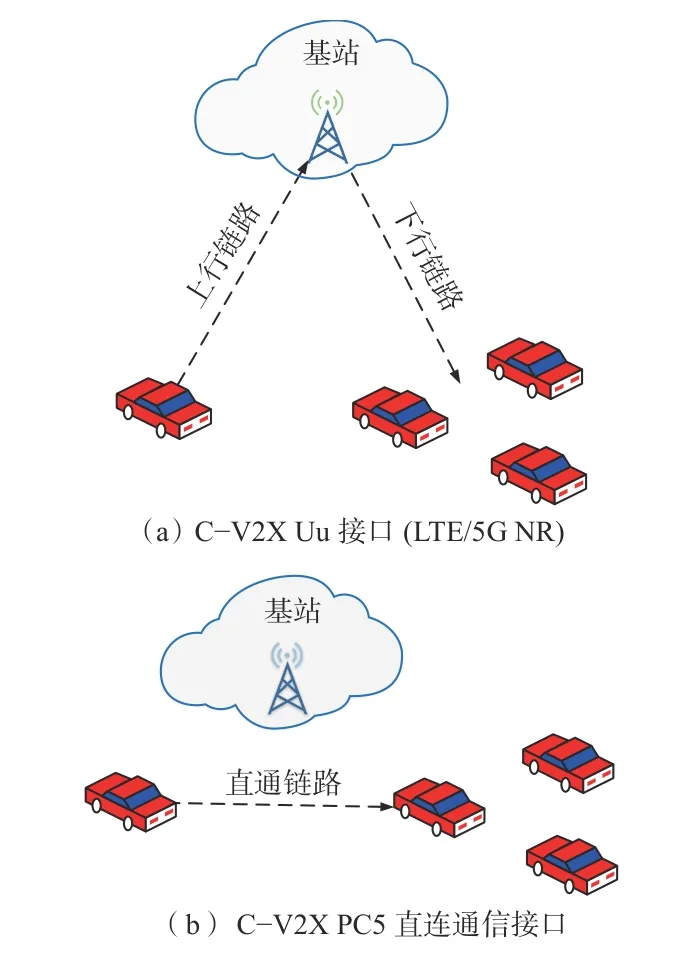
圖2 C-V2X通信接口Fig. 2 C-V2X communication interface
1.2 煤礦井下自動駕駛智能化關鍵技術
煤礦井下巷道環境對智能化技術的應用有顯著影響,為了實現煤礦井下智能化技術的安全可靠應用,需要針對以下關鍵技術開展研究:
(1) 無GNSS的移動高精定位技術:GNSS信號無法實現井下覆蓋,自動駕駛技術最為常規的GNSS RTK技術無法適用。需要基于已有精確定位技術(如超寬帶(Ultra Wide Band,UWB))開展增強研究,以適應自動駕駛最高厘米級的高精度定位需求。
(2) 激光雷達的井下現場試驗:激光雷達主要包括飛行時間(Time of Flight,TOF)激光雷達和調頻連續波(Frequency Modulated Continuous Wave,FMCW)激光雷達。TOF激光雷達是目前的主流技術,原理簡單;FMCW激光雷達原理復雜,但能夠通過匹配濾波避免多個激光雷達共存時的相互干擾。需要針對煤礦井下受限空間環境特點,在多車輛、巷道側部署激光雷達,驗證TOF激光雷達能否在相互干擾狀況下穩定工作。此外,煤塵、粉塵粒度與激光雷達典型波長相近,需要驗證吸收效應對檢測精度的影響。
(3) 基于毫米波雷達的井下障礙物檢測技術:毫米波雷達分為脈沖式和FMCW式兩類,FMCW毫米波雷達是目前主流類型。毫米波雷達能夠精確測量被測目標的相對距離和相對速度,具有體積小、精度相對高、穩定性強、抗干擾能力強、不受雨雪天氣影響等優點,探測距離最遠可達300 m,可作為井下障礙物檢測的主要技術。
(4) 井下低照度視頻實時增強和特征匹配技術:煤礦井下AI(Artificial Intelligence,人工智能)視頻分析、礦山電子封條等技術應用廣泛,應用門檻低,但井下低照度下能否實時完成圖像增強和特征匹配需要開展針對性的現場試驗[10]。
(5) 井下環境高精地圖技術:高精地圖技術目前在地面的應用受到地理信息安全、信息安全政策法規的限制。煤礦井下屬于封閉場景,車輛、設備均可封閉管控,結合三維GIS(Geographic Information System,地理信息系統)等現有成熟技術,煤礦井下的高精地圖應用壁壘顯著降低。
(6) 井下自動駕駛車輛決策規劃技術:由于煤礦井下環境封閉,智慧運輸的交通環境、道路分布的復雜度遠低于地面交通,煤礦井下規劃決策可重用地面常規技術。
(7) 井下自動駕駛車輛控制執行技術:井下車輛線控、電子電氣架構設計需要考慮防爆要求,但可重用地面常規技術。
1.3 煤礦井下自動駕駛網聯化關鍵技術
網聯化技術在地面交通和露天煤礦應用的主流方案是C-V2X直連通信+5G蜂窩通信,井工煤礦目前主要采用5G技術開展遠程駕駛應用測試。C-V2X中的LTE(Long Term Evolution,長期演進)-V2X直連通信能夠提高最大20 ms空口時延[11],NR(New Radio,新空口)-V2X直連通信設計目標是3 ms空口時延,支持單播、組播、廣播傳輸方式,并支持基于反饋的傳輸[12],時延更低,可靠性更高,但尚未進入技術應用階段。目前C-V2X在煤礦井下應用的公開研究資料較少。
煤礦5G技術近年來成為研究熱點,5G系統在煤礦的建設推進迅速[13-14]。5G遠程駕駛、5G+UWB車輛管理已開展了現場試驗和初步應用,能夠支撐V2N業務需求[15]。然而,煤礦井下通信中上行鏈路傳輸資源需求顯著,因此礦用5G系統需支持1D3U的幀結構配置。煤礦井下自動駕駛的網聯技術還需要聚焦其他頻譜資源,以減輕5G上行傳輸的負載。C-V2X直連通信可使用智能交通系統專用頻段,即Band47(5 855~5 925 MHz),包括工信部已經分配的5 905~5 925 MHz及5G NR-V2X潛在可能使用的40 MHz候選頻譜(5 865~5 905 MHz)。
因此,開展煤礦井下自動駕駛C-V2X直連通信研究具有顯著的必要性,主要方向如下 :
(1) 井下巷道5.9 GHz頻段信號傳輸特性:5.9 GHz頻段是專用于智能交通系統的頻段,需要在煤礦井下開展信號傳輸特性研究,為井下C-V2X系統信號覆蓋方案設計提供依據。
(2) 井下直連通信時間同步機制:根據中國通信行業標準規定,LTE-V2X設備必選的時間同步方式為GNSS[16-17],需要針對井下無GNSS場景開展直連通信時間同步機制研究和試驗。
(3) 井下自動駕駛場景及應用協議:C-V2X應用層協議是針對地面交通領域的,還需開展井下自動駕駛場景研究,定義針對井下的應用層協議。
(4) 多接入技術適配機制:在C-V2X+5G多種無線接入技術共存的情況下,需要構建多業務的需求模型,研究業務與接入技術映射和選擇機制。
綜上分析可知,煤礦井下開展自動駕駛研究與應用存在空間封閉受限、低照度、遮擋物及障礙物較多、無GNSS信號等關鍵技術問題。但與地面交通領域自動駕駛技術存在無人駕駛的法規限制、多異構信息物理系統接口互通存在難題、網聯化設備滲透率低、運營主體及商業模式尚不清晰、安全認證管理機構尚不明確等問題相比,煤礦井下網聯化自動駕駛技術應用的前景則具有顯著優勢,主要體現在如下方面:
(1) 應用目標明確:少人化、無人化的煤礦輔助運輸。
(2) 管理運營主體明確:礦方為管理方,煤礦系統服務提供商為建設服務方。
(3) 煤礦井下自動駕駛場景封閉、路線固定,且車輛運行速度相對慢,最高運行速度為30 km/h。
(4) 車輛智能化及網聯化裝備滲透率可控,具備統一裝配的條件。
(5) 煤礦5G廣泛建設,已有成熟的應用案例。
(6) 煤礦井下車輛通常為定制化開發,接口開放,不存在門檻。
煤礦井下智能化、網聯化關鍵技術總結見表1。
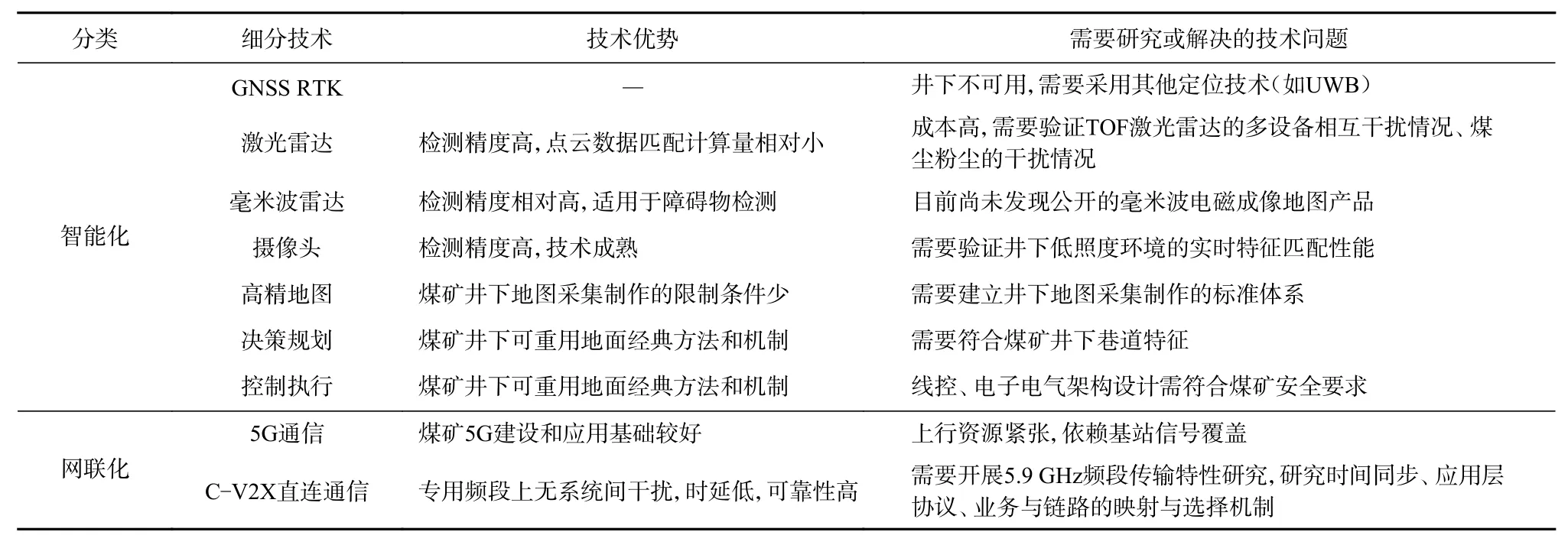
表1 煤礦井下智能化、網聯化關鍵技術Table 1 Key technologies of underground intelligent technologies and network connected technologies
2 煤礦井下網聯式自動駕駛技術架構及演進路徑
基于對煤礦井下自動駕駛關鍵技術的分析,筆者提出了煤礦井下網聯式自動駕駛系統參考架構,結合各項關鍵技術的現狀及演進預期,分析了煤礦井下網聯式自動駕駛演進路徑。
2.1 煤礦井下網聯式自動駕駛系統參考架構
煤礦井下網聯式自動駕駛系統參考架構如圖3所示,包括煤礦井下自動駕駛車輛、井下巷道基礎設施、煤礦云/邊緣計算平臺及煤礦自動駕駛應用服務平臺。
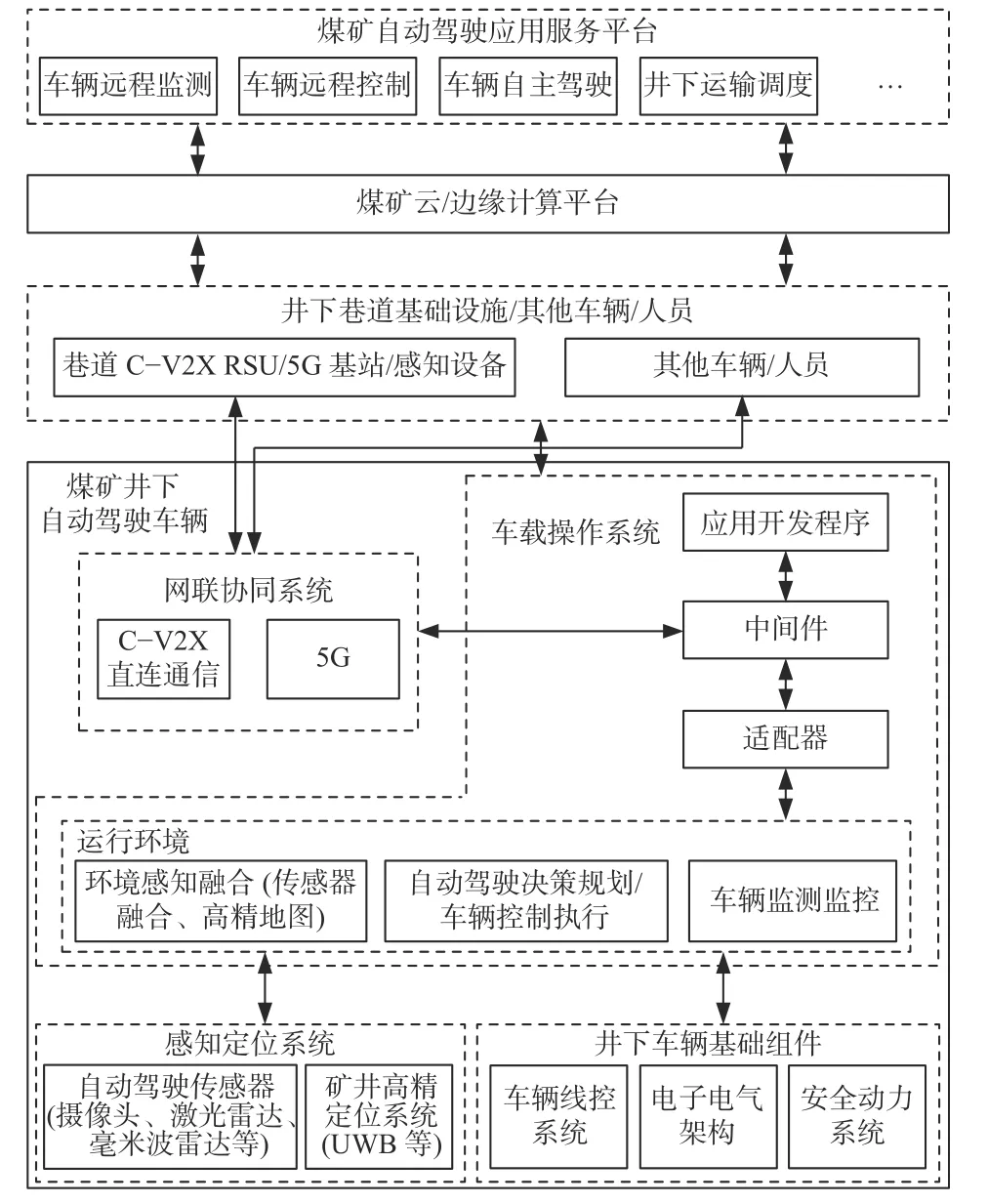
圖3 煤礦井下網聯式自動駕駛系統參考架構Fig. 3 Reference architecture of underground coal mine network connected and automatic driving system
2.1.1 煤礦井下自動駕駛車輛
煤礦井下自動駕駛車輛包括以下模塊:
(1) 感知定位系統:包括檢測傳感器、礦井高精定位系統,實現環境感知和高精定位等功能。其中檢測傳感器包括用于環境要素匹配的檢測傳感器和用于障礙物檢測的傳感器,前者可為低照度高清攝像頭或者激光雷達,后者可以為毫米波雷達。礦井高精定位系統目前可為UWB定位系統,未來還可應用基于3GPP Release 17及其演進版本的蜂窩網定位系統,或者3GPP Release 18正在研究的直連通信定位系統。
(2) 網聯協同系統:包括C-V2X直連通信模組和5G通信模組。其中LTE-V2X直連通信宜承載交通調度指令廣播和車輛行駛狀態廣播,NR-V2X直連通信宜承載車巷傳感器數據交互共享、高等級自動駕駛規劃決策等業務,5G通信宜承載井下高精地圖下發和自動駕駛版本更新等業務。
(3) 車載操作系統:包括應用開發程序、中間件、適配器等基礎組件及環境感知融合、自主駕駛決策規劃、車輛控制執行、車輛監測監控等算法軟件的運行環境。其中,高精地圖需要按照自車傳感器類型進行制作,對車輛運行的全部井下環境進行采集。
(4) 車輛基礎組件:包括車輛線控系統、電子電氣架構、安全動力系統等,提供車輛運行、控制等基礎功能。車輛線控系統包括線控轉向、線控制動、線控換擋、線控油門、線控懸掛5個關鍵模塊,是煤礦井下自動駕駛車輛改造最為關鍵的環節。
2.1.2 井下巷道基礎設施
巷道應部署C-V2X RSU(Road Side Unit,路側單元)、5G基站及感知設備等,用于提供車輛、人員、平臺之間的通信鏈路,獲取車輛運行和人員情況,提供巷道側感知數據、平臺側控制/調度指令等,彌補單車感知不足,降低車端計算能力要求,實現車巷協同。
巷道側的感知設備需要具備環境因素精確感知能力,通過煤礦云/邊緣計算平臺的下沉或者與計算平臺的高速數據交互,獲取感知數據和無線定位數據融合結果,生成巷道內移動物體的結構化信息;通過C-V2X RSU廣播類似地面環境的RSM(Road Safety Message,道路安全消息),實現巷道數字地理空間要素的播發和構建,是車巷協同的關鍵。
2.1.3 煤礦云/邊緣計算平臺
煤礦云/邊緣計算平臺用于提供煤礦自動駕駛系統的算力資源、信息物理系統協同控制模型等。其中,信息物理系統協同控制模型需要滿足“環境實時仿真+精準預測+動態控制”的要求。環境實時仿真即通過強大算力和魯棒算法快速精確實現感知數據和無線定位數據融合,構建巷道數據空間;精準預測需要結合環境實時仿真快速分析巷道內移動物體和環境變化因素,實時提供車輛運行策略;動態控制則是對車輛運行策略的微觀轉化,即通過執行基于車輛動力學模型的車輛微觀動作組合指令,實現車輛控制,執行車輛運行策略,實時給車輛基礎組件提供可執行、可量化的指令。自動駕駛的信息物理系統協同控制模型構建是自動駕駛全息數字巷道的關鍵要素。
2.1.4 煤礦自動駕駛應用服務平臺
煤礦自動駕駛應用服務平臺用于為車輛遠程監控、車輛自主駕駛、井下運輸調度等應用場景提供服務,向上為井上人員提供監測、控制的界面操作接口,向下為計算平臺提供模型更新的數據接口,為井下自動駕駛車輛提供控制指令接口。
2.2 煤礦井下網聯式自動駕駛演進路徑
煤礦自動駕駛的應用目標是實現“機械化換人、自動化減人”,基于這一目標,結合當前煤礦領域相關技術發展現狀及演進趨勢,煤礦井下網聯式自動駕駛的演進路徑將經歷3個階段,最終實現高度無人化的智能運輸。
(1) 第1階段:遠程自動駕駛。當前我國煤礦5G通信系統建設已進入快速發展期,已經具備支持3GPP定義的遠程自動駕駛的基礎能力。煤礦井下遠程自動駕駛主要通過高精攝像裝置實時回傳車輛運行的現場環境,結合UWB高精定位結果,依托5G低時延、大帶寬、高可靠的特性,位于地面遠程控制中心的操作人員根據現場圖像實時操作遠程控制裝置,下發對應指令給車輛執行。
煤礦井下網聯式自動駕駛的第1階段實現車輛駕駛人員由井下向井上的轉移。我國目前已擁有了煤礦井下遠程駕駛的應用案例,如國家能源集團神東煤炭上灣煤礦、陜煤榆北煤業公司曹家灘煤礦成功開展了測試驗證和初步應用。
(2) 第2階段:具有緊急接管邊界的車輛自動駕駛。3GPP TS 22.186定義了支持自動駕駛的車聯網應用場景指標[18](表2),遠程駕駛應用基于蜂窩網絡(5G),但高級自動駕駛、傳感器共享等場景還需要依托C-V2X直連通信實現車巷協同。

表2 3GPP TS22.186定義的車聯網應用場景指標Table 2 Application scene indicator of V2X defined in 3GPP TS 22.186
煤礦井下網聯式自動駕駛同樣需要依托演進的自動駕駛網聯化和智能化技術不斷發展。C-V2X中的NR直連通信能夠支持單播、組播、廣播通信方式,承載多樣化業務傳輸;支持直連通信反饋機制,終端自主資源分配機制下支持重評估和搶占機制,具有高可靠傳輸性能;支持多種基帶參數配置,能夠實現在最低0.125 ms時域資源粒度下支持更低時延性能;預期即將開展國內標準化及相關的測試驗證。隨著C-V2X直連通信設備和各種感知定位設備在煤礦井下現場系統性試驗驗證的開展,煤礦井下網聯式自動駕駛的第2階段將向基于車巷協同的車輛自動駕駛方向發展,自動駕駛的通信資源和鏈路可以向低時延、高可靠、大帶寬的C-V2X直連通信轉移,從而減輕5G網絡的上行鏈路負載。但限于自動駕駛和井下生產的雙重安全性要求,需設定自動駕駛車輛緊急接管的邊界條件,將遠程遙控自動駕駛作為接管手段,井上操作人員具有最高控制權,確保井下自動駕駛的安全性。
(3) 第3階段:車輛自主駕駛。煤礦井下自動駕駛最終目標是實現高度無人化的智能運輸。隨著自動駕駛技術、煤礦井下智能化和網聯化技術的長期試驗、系統驗證,隨著自動駕駛的功能安全和預期功能安全關鍵機制的全面細化明確,煤礦井下的自動駕駛安全邊界將得到明確定義,以實現高度安全可靠的車輛自主駕駛。
煤礦井下網聯式自動駕駛第3階段將實現“人-車-巷-云”協同控制、安全高效自主運行、支持高度無人化的智能運輸。
3 結論
(1) 系統分析了地面自動駕駛智能化技術和C-V2X、5G等網聯化技術的現狀及特點;結合煤礦井下需求與環境,詳細分析并指出智能化、網聯化技術在煤礦井下自動駕駛應用的優勢和技術問題,指出煤礦井下開展自動駕駛研究與應用存在空間封閉受限、低照度、遮擋物及障礙物較多、無GNSS信號等關鍵技術問題,但具有少人化/無人化需求顯著、運營管理主體明確、場景封閉、路線固定、車速較慢、滲透率可控、5G建設基礎較好、接口易開放等顯著優勢。
(2) 提出了煤礦井下網聯式自動駕駛系統參考架構,包括井下自動駕駛車輛、巷道基礎設施、煤礦云/邊緣計算平臺、煤礦自動駕駛應用服務平臺;設計了煤礦自動駕駛車輛架構,包括感知定位系統、網聯協同系統、車載操作系統、車輛基礎組件。
(3) 提出煤礦井下網聯式自動駕駛演進將經歷3個階段:第1階段為遠程自動駕駛,實現車輛駕駛人員從井下到井上的轉移;第2階段為具有緊急接管邊界的車輛自動駕駛,以車輛自動駕駛為主,將遠程緊急接管作為安全保障手段;第3階段為“人-車-巷-云”協同控制,井下自動駕駛車輛安全高效自主運行,實現高度無人化智能運輸。
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
建材發展導向(2021年10期)2021-07-16 07:13:24
印刷工業(2020年4期)2020-10-27 02:46:02
印刷工業(2020年4期)2020-10-27 02:45:52
中國交通信息化(2017年4期)2017-06-06 07:21:52
工業設計(2016年4期)2016-05-04 04:00:23
能源(2015年8期)2015-05-26 09:15:56
現代企業(2015年8期)2015-02-28 18:55:34
現代企業(2015年6期)2015-02-28 18:51:50
河南科技(2014年8期)2014-02-27 14:08:07