圓形陣列無線傳感器的鳥鳴聲檢測(cè)方法?
2022-07-07 07:23:12張巧花
應(yīng)用聲學(xué) 2022年3期
張巧花 張 純
(中國科學(xué)院聲學(xué)研究所 北京 100190)
0 引言
鳥類是一種對(duì)生態(tài)環(huán)境和全球氣候變化極為敏感的指示性生物,其數(shù)量變化及多樣性等特征直接反映棲息地的生態(tài)系統(tǒng)平衡程度,是一個(gè)良好的環(huán)境質(zhì)量評(píng)價(jià)指標(biāo)[1?2]。鳥類通過鳴叫聲進(jìn)行通訊、求偶等,鳥鳴聲包含著豐富的生物學(xué)信息,在不同屬或種間鳴聲特征具有差異性,是鳥類物種識(shí)別的重要依據(jù)[3?5]。對(duì)棲息地內(nèi)的鳥類鳴聲進(jìn)行長期監(jiān)測(cè)可以了解鳥類種群變化及遷徙規(guī)律,是監(jiān)管保護(hù)鳥類的重要舉措[6?8]。隨著自然生態(tài)環(huán)境保護(hù)的不斷加強(qiáng),棲息地中重要鳥類遷徙的遠(yuǎn)程在線監(jiān)測(cè)問題變得日益重要,特別是對(duì)珍稀瀕危鳥類種群的保護(hù)及生態(tài)系統(tǒng)監(jiān)測(cè)都具有重要意義。
在海島及濱海濕地等特殊環(huán)境的自然保護(hù)區(qū),鳥類的監(jiān)測(cè)仍以傳統(tǒng)的人工監(jiān)測(cè)為主,通過架設(shè)望遠(yuǎn)鏡、紅外相機(jī)等進(jìn)行視覺觀察,人工攜帶錄音設(shè)備進(jìn)行聲音采集,但這種傳統(tǒng)方法觀察范圍小且效率較低,同時(shí)會(huì)對(duì)鳥類活動(dòng)造成干擾。此外,當(dāng)前的鳴聲采集裝置在潮濕環(huán)境下無法長時(shí)間工作,在低信噪比環(huán)境下拾聲效果差,而且數(shù)據(jù)難以實(shí)時(shí)回傳,達(dá)不到在線監(jiān)測(cè)需求,適用性差。而基于陣列方法的非入侵式聲學(xué)遠(yuǎn)程系統(tǒng)為鳥類活動(dòng)生態(tài)監(jiān)測(cè)提供了可行性,能在生態(tài)敏感區(qū)如自然保護(hù)區(qū)或難以進(jìn)入的區(qū)域如大型蘆葦棲息地進(jìn)行長期的在線監(jiān)測(cè)[9?13]。
為獲得自然指向性的鳥鳴聲增強(qiáng)信號(hào),基于物聯(lián)網(wǎng)開發(fā)了圓形陣列傳感器系統(tǒng)。但在實(shí)際應(yīng)用中,由于棲息地供電設(shè)施、網(wǎng)絡(luò)等條件限制,為保障系統(tǒng)在野外長期穩(wěn)定運(yùn)行,針對(duì)鳥類一般在某些時(shí)間段內(nèi)比較活躍,其他時(shí)間段只有少量鳥鳴聲的情況,為了提升系統(tǒng)的可靠性、減輕數(shù)據(jù)傳輸負(fù)擔(dān)及不必要的電能消耗,需要對(duì)有效鳴聲數(shù)據(jù)段進(jìn)行自動(dòng)檢測(cè)分段后再進(jìn)行無線數(shù)據(jù)傳輸。常見的端點(diǎn)檢測(cè)算法有基于時(shí)間參數(shù)平均值的決策參數(shù),例如自相關(guān)系數(shù)、過零率或短期能量,這些方法雖然簡單,但效果并不理想,一般只適用于高信噪比情況,且在復(fù)雜背景噪聲低信噪比情況下難以獲得理想結(jié)果,穩(wěn)健性差[14?15]。本文提出了一種子帶能量譜熵比的動(dòng)態(tài)雙門限信號(hào)端點(diǎn)檢測(cè)算法,對(duì)仿真數(shù)據(jù)和海島野外實(shí)驗(yàn)數(shù)據(jù)進(jìn)行驗(yàn)證和分析,算法在復(fù)雜環(huán)境條件下依然能有效檢測(cè)鳥鳴聲信號(hào)端點(diǎn)。
1 圓形陣列無線傳感器系統(tǒng)
1.1 傳感器陣列設(shè)計(jì)
鳥類鳴聲傳感器陣列設(shè)計(jì)采用“6+1”的七元全向傳聲器作為基本陣列,陣型設(shè)計(jì)為圓形。其中6 個(gè)傳聲器陣元均勻等角度地分布在圓形板上形成半徑為r的圓環(huán),另一個(gè)傳聲器陣元布置在圓心用作信號(hào)參考,相鄰陣元間距d=2rsin(π/M),其中M表示陣元數(shù),則陣元m的空間位置表示為rm=(rcos(φm),rsin(φm),0),φm=(m?1)2π/M表示陣元m的圓心角。傳聲器陣元采用半波長布陣,國內(nèi)大部分海島鳥鳴聲頻譜在1 kHz~6 kHz之間,按照6 kHz 的半波長進(jìn)行布陣,聲音在空氣中傳播速度為340 m/s,則波長為

半波長λ/2=2.8 cm,即布陣陣元間距d=2.8 cm。
七元傳聲器陣列的陣元間距設(shè)計(jì)為30 mm,適當(dāng)增大陣元間距有利于提升陣列的空間波束形成性能,且?guī)缀醪粫?huì)產(chǎn)生空間混疊現(xiàn)象。圓形陣列安裝在球形剛性金屬結(jié)構(gòu)內(nèi),如圖1(b)所示。七元陣列接收信號(hào)通過采用波束形成處理能夠抑制環(huán)境噪聲增強(qiáng)鳴聲信號(hào),改善海島野外復(fù)雜噪聲下的鳥鳴聲信號(hào)接收性能。

圖1 圓形陣列無線傳感器結(jié)構(gòu)示意圖Fig.1 Circular array wireless sensor structure
海島及濱海濕地等棲息地中陣列無線傳感器長期暴露在野外濕、熱、鹽、風(fēng)、雨等環(huán)境下,既要對(duì)拾聲傳感器進(jìn)行有效保護(hù),又不能影響對(duì)聲音的拾取。為了適應(yīng)野外環(huán)境,傳感器的結(jié)構(gòu)采用球形剛性殼體設(shè)計(jì),將硬件電路和數(shù)字式傳聲器陣列密封在殼體中,有效防止硬件電路系統(tǒng)被海島高鹽和潮濕環(huán)境侵蝕及減少野外風(fēng)、海浪等噪聲干擾,保證電路長期穩(wěn)定運(yùn)行。在球形殼體結(jié)構(gòu)中間留有高8 mm 的傳聲器拾聲窗口,聲音經(jīng)過窗口到達(dá)傳聲器陣列時(shí)滿足平面波要求。球體下方的方形密封電路倉內(nèi)放置信號(hào)采集處理電路和控制通信電路,剛性球形結(jié)構(gòu)如圖1所示。
1.2 球形結(jié)構(gòu)的接收聲場(chǎng)分析
剛性球形結(jié)構(gòu)具有各向同性的特點(diǎn),能夠較好地利用球諧域傅里葉變換對(duì)頻率信號(hào)和空間信號(hào)進(jìn)行解耦,解決寬帶相干信號(hào)定位問題,同時(shí)大大降低結(jié)構(gòu)聲散射對(duì)鳥鳴聲拾取的影響,為了分析剛性球的聲散射特性,將剛性球和非剛性球進(jìn)行了對(duì)比。所謂剛性球就是圓球表面為剛性表面,計(jì)算聲場(chǎng)分布時(shí)需考慮散射的影響,而非剛性球就是指虛擬球體,聲波到達(dá)球體表面時(shí)無需考慮散射影響。假設(shè)單位平面波從某個(gè)方向入射后,非剛性球和剛性球情況下的模態(tài)強(qiáng)度函數(shù)bn(kr)滿足[16]
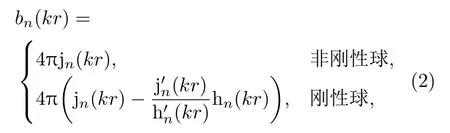
其中,jn(kr)和j′n(kr)分別為n階球貝塞爾函數(shù)及導(dǎo)數(shù),hn(kr)和h′n(kr)分別為n階球漢克爾函數(shù)及導(dǎo)數(shù),k為波數(shù),等于信號(hào)角頻率與聲速的比值,r為球體的半徑。
仿真分析模態(tài)強(qiáng)度bn(kr)隨kr的變化如圖2所示,模態(tài)強(qiáng)度的變化將影響球面位置的對(duì)應(yīng)頻點(diǎn)聲壓。由圖2可知,與非剛性球比較,bn(kr)在不同階所關(guān)注的頻點(diǎn)上不存在模態(tài)強(qiáng)度突然下拉的點(diǎn),避免了噪聲在該頻點(diǎn)上被放大的問題。鳥類鳴聲源的頻率大部分集中在1 kHz~6 kHz 之間,本文所采用的剛性球的直徑為114 mm,對(duì)應(yīng)的kr為1.03~6.21 之間,因此采用剛性球有助于提高傳感器的魯棒性,避免模態(tài)強(qiáng)度在不同頻率之間劇烈抖動(dòng)。在結(jié)構(gòu)的設(shè)計(jì)和制造過程中,非球形結(jié)構(gòu)會(huì)產(chǎn)生各向一致性差的問題。因此,利用剛性球的散射特性,聲信號(hào)進(jìn)入接收窗時(shí)的各向一致性好,且對(duì)各頻點(diǎn)模態(tài)相對(duì)平滑,有利于傳聲器陣列更好地拾取鳴聲信號(hào)及后處理。
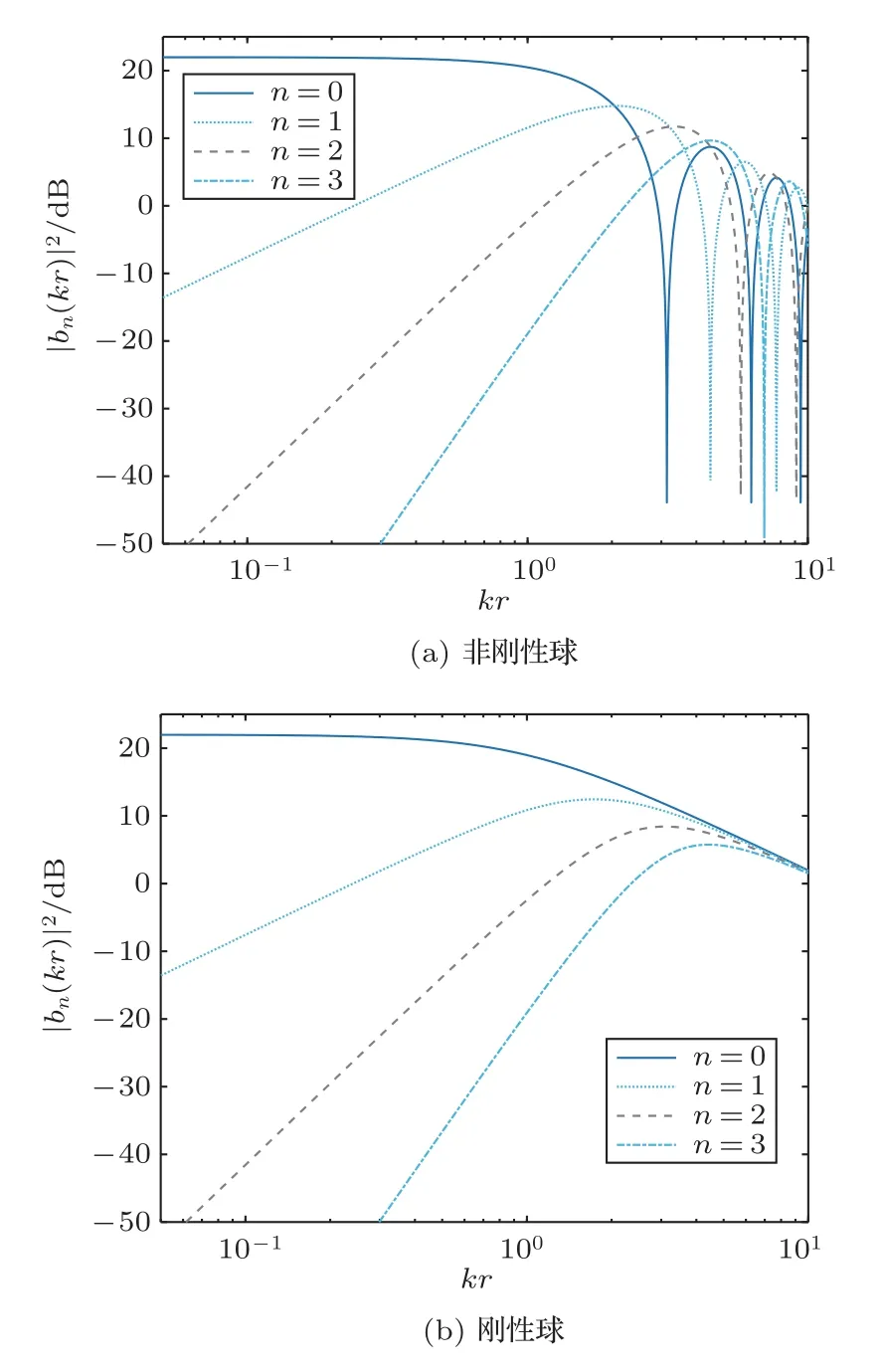
圖2 不同階下的模態(tài)強(qiáng)度值變化Fig.2 Modal strength variation in different orders
2 子帶能量譜熵比特征鳴聲段檢測(cè)
2.1 原理與方法
子帶能量特征檢測(cè)方法通過比較特定子帶(時(shí)域、頻域或者其他變換域)內(nèi)信號(hào)能量與設(shè)定閾值判決信號(hào)是否存在。子帶譜熵將一幀鳴聲分成若干子帶,再求每一個(gè)子帶譜熵。海島野外噪聲具有隨機(jī)性和復(fù)雜性,這就降低了環(huán)境噪聲對(duì)每一條譜線幅值的影響。相關(guān)研究表明,鳥鳴聲信號(hào)的頻譜基本集中在500 Hz~10 kHz 之間,大部分鳴聲頻譜在1 kHz~6 kHz 之間[17]。本文采用500 Hz~10 kHz的帶通濾波器對(duì)數(shù)據(jù)進(jìn)行降噪處理。
七陣元圓形陣列無線傳感器系統(tǒng)采集的數(shù)據(jù)包含鳴聲與噪聲,鳥類活躍時(shí)間不固定,大部分時(shí)間段采集的是環(huán)境噪聲。鳥類活動(dòng)鳴聲段檢測(cè)及自動(dòng)分段,是開展鳥類鳴聲監(jiān)測(cè)和生態(tài)學(xué)研究的基礎(chǔ)[18]。鳴聲端點(diǎn)檢測(cè)通過從含有背景噪聲的鳥鳴聲信號(hào)中確定鳴聲起止點(diǎn),準(zhǔn)確的端點(diǎn)檢測(cè)能夠提高鳴聲識(shí)別的準(zhǔn)確率。在語聲信號(hào)處理領(lǐng)域,語聲端點(diǎn)檢測(cè)有兩類方法:特征量-門限法和模型-分類器法[19?20],前者計(jì)算量小,實(shí)時(shí)性高。對(duì)于鳥類鳴聲的實(shí)驗(yàn)研究表明,大多數(shù)鳥鳴聲頻譜存在明顯的子帶峰值[21?24],本文采用子帶能量譜熵比為特征量,結(jié)合鳥鳴聲特點(diǎn)實(shí)現(xiàn)鳴聲信號(hào)端點(diǎn)檢測(cè),在低信噪比環(huán)境下算法端點(diǎn)檢測(cè)有較好的魯棒性,算法流程如圖3所示。

圖3 鳴聲信號(hào)檢測(cè)處理流程圖Fig.3 Birdsong signal detection and process
在確保鳥鳴聲信號(hào)不失真的情況下,經(jīng)過陣元波束形成、預(yù)加重信號(hào)補(bǔ)償?shù)阮A(yù)處理后,選取鳥鳴聲信號(hào)X(t)為處理片段,對(duì)信號(hào)X(t)進(jìn)行漢寧窗加窗分幀后,數(shù)據(jù)幀長度為L毫秒,做N點(diǎn)傅里葉變換,幀重疊N/2點(diǎn),預(yù)加重補(bǔ)償后,對(duì)每一幀鳴聲信號(hào)進(jìn)行短時(shí)傅里葉變換,得到每幀信號(hào)的能量譜,其中第k條譜線頻率分量fk的能量譜為|Xi(k)|2。
將一幀分成若干子帶并求子帶譜熵,假設(shè)每條子帶有n條譜線,共有M個(gè)子帶,第i幀中的第m條子帶能量E(m,i)為
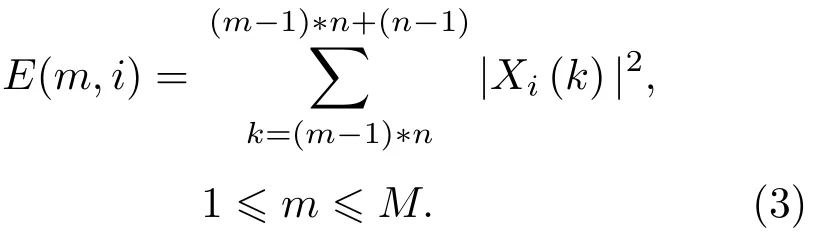
子帶能量概率分布密度pb(m,i)和子帶譜熵可分別表示為

利用能量和子帶譜熵構(gòu)成子帶能量譜熵比,為提高鳥鳴聲信號(hào)和環(huán)境噪聲檢測(cè)能力,更突出噪聲段與鳥鳴聲段,本文設(shè)置α為常數(shù)2,子帶能量譜熵比可表示為

2.2 動(dòng)態(tài)雙門限端點(diǎn)判決
野外環(huán)境下的噪聲具有非平穩(wěn)特性,當(dāng)含噪鳴聲信號(hào)的能量可以衰減到噪聲能量級(jí)別時(shí)[25],含噪鳴聲信號(hào)的能量譜熵比快速收斂,可以通過估計(jì)含噪鳴聲信號(hào)局部最小值的方法,自適應(yīng)估計(jì)噪聲的門限值,提高算法魯棒性[26]。
在低信噪比情況下,為減小誤判提高檢測(cè)準(zhǔn)確率,對(duì)含噪聲的鳴聲信號(hào)能量譜熵比進(jìn)行多次中值濾波平滑處理后提取鳴聲端點(diǎn)位置,將子帶能量譜熵比最大值Fmax(m,i)與均值F做差得到D作為門限選取的基準(zhǔn)閾值,采用雙門限閾值進(jìn)行有效鳴聲段判決,其雙門限閾值可表示為THigh=αD+F,TLow=βD+F,其中α、β是動(dòng)態(tài)調(diào)節(jié)系數(shù)。
檢測(cè)每段鳴聲信號(hào)中能量較高的子帶,確定有效鳴聲的起止點(diǎn)。為了提高計(jì)算效率,減小有效鳥鳴聲段數(shù)據(jù)誤差,當(dāng)子帶能量譜熵比F(m,i)位于TLow時(shí),則進(jìn)入鳥鳴聲段開始點(diǎn),當(dāng)超過高門限再次回落至低門限時(shí),則判定為有效鳴聲段的結(jié)束點(diǎn)。
在實(shí)際監(jiān)測(cè)過程中,對(duì)采集到的鳴聲數(shù)據(jù)進(jìn)行自動(dòng)分段,只傳輸有效鳴聲段,若沒有檢測(cè)到活動(dòng)鳴聲段,則剔除冗余的無聲數(shù)據(jù)段,數(shù)據(jù)不上傳。為獲得完整的鳴聲段,便于云平臺(tái)做進(jìn)一步數(shù)據(jù)處理,通常將檢測(cè)得到的鳴聲數(shù)據(jù)段長度向前后各延伸15%作為完整的鳴聲段上傳,如果兩段鳴聲之間的靜音長度小于各自延伸長度的和,則認(rèn)為這是連續(xù)的鳴聲段上傳。
3 數(shù)據(jù)處理與分析
3.1 實(shí)驗(yàn)仿真分析
在暗綠繡眼純凈鳥鳴聲中分別加入一定幅度的白噪聲和實(shí)測(cè)環(huán)境噪聲,模擬特定信噪比的含噪聲鳥鳴聲。選取的高信噪比純凈鳴聲信號(hào)總時(shí)長3 s,鳴聲采樣頻率為44.1 kHz,采樣精度為16 bits。現(xiàn)將鳴聲分成兩組,分別加入信噪比為0 dB 和?10 dB 的高斯白噪聲以及圓形陣列無線傳感器系統(tǒng)現(xiàn)場(chǎng)采集的暴風(fēng)雨聲和風(fēng)浪聲噪聲數(shù)據(jù),數(shù)據(jù)分幀長度20 ms。為了避免信號(hào)間變化過大,本文幀重疊率為50%。利用子帶能量譜熵比特征檢測(cè)方法對(duì)有效鳥鳴聲段進(jìn)行檢測(cè),結(jié)果如圖4所示。

圖4 不同環(huán)境信噪比下鳴聲檢測(cè)結(jié)果Fig.4 The detection results in different SNR
在?10 dB 的噪聲條件下,時(shí)域上鳥鳴聲信號(hào)已完全被噪聲淹沒,但算法利用動(dòng)態(tài)雙門限方法依然能檢測(cè)出三段鳴聲信號(hào)起止點(diǎn),證明該算法對(duì)低信噪比條件下鳥鳴聲端點(diǎn)檢測(cè)有較好的效果。
針對(duì)上述不同環(huán)境噪聲下的檢測(cè)概率進(jìn)行了實(shí)驗(yàn)比較,其中準(zhǔn)確率計(jì)算方式如下:

式(7)中,誤判幀數(shù)包括噪聲幀檢測(cè)為鳴聲幀和鳴聲幀檢測(cè)為噪聲幀。對(duì)隨機(jī)樣本數(shù)據(jù)進(jìn)行檢測(cè)然后取平均值,得到的檢測(cè)準(zhǔn)確率如表1所示。

表1 不同環(huán)境條件下的鳥鳴聲檢測(cè)準(zhǔn)確率Table 1 Birdsong detection accuracy in different environments
3.2 實(shí)測(cè)數(shù)據(jù)處理分析
為現(xiàn)場(chǎng)測(cè)實(shí)驗(yàn)證圓形陣列無線傳感器性能及鳴聲檢測(cè)方法的有效性,將設(shè)備布放在野外自然條件下、如圖5所示的海島上。電源采用12 V 直流供電,傳感器利用4G 物聯(lián)網(wǎng)卡將數(shù)據(jù)傳輸?shù)竭h(yuǎn)程監(jiān)測(cè)服務(wù)云平臺(tái)并存儲(chǔ)實(shí)驗(yàn)數(shù)據(jù)。

圖5 鳴聲傳感器實(shí)驗(yàn)裝置Fig.5 Birdsong sensor device
為了驗(yàn)證該方法的檢測(cè)性能,對(duì)現(xiàn)場(chǎng)采集的海浪聲噪聲背景下的黑尾鷗原始數(shù)據(jù)進(jìn)行處理分析,結(jié)果如圖6所示。圖6(a)是含海浪聲的鳥鳴聲語譜圖,圖6(b)為采集信號(hào)的時(shí)域波形圖;圖6(c)為利用子帶能量譜熵比的動(dòng)態(tài)雙門限算法檢測(cè)到的鳥鳴聲起止端點(diǎn)結(jié)果,圖中紅色是雙動(dòng)態(tài)自適應(yīng)檢測(cè)門限,并將檢測(cè)結(jié)果顯示到時(shí)域波形圖中。通過圖6可以看出,子帶能量譜熵比算法結(jié)合動(dòng)態(tài)雙門限方法在低信噪比條件下能準(zhǔn)確檢測(cè)出海島鳥鳴聲信號(hào),且在海島環(huán)境下具有較強(qiáng)的抗干擾能力。
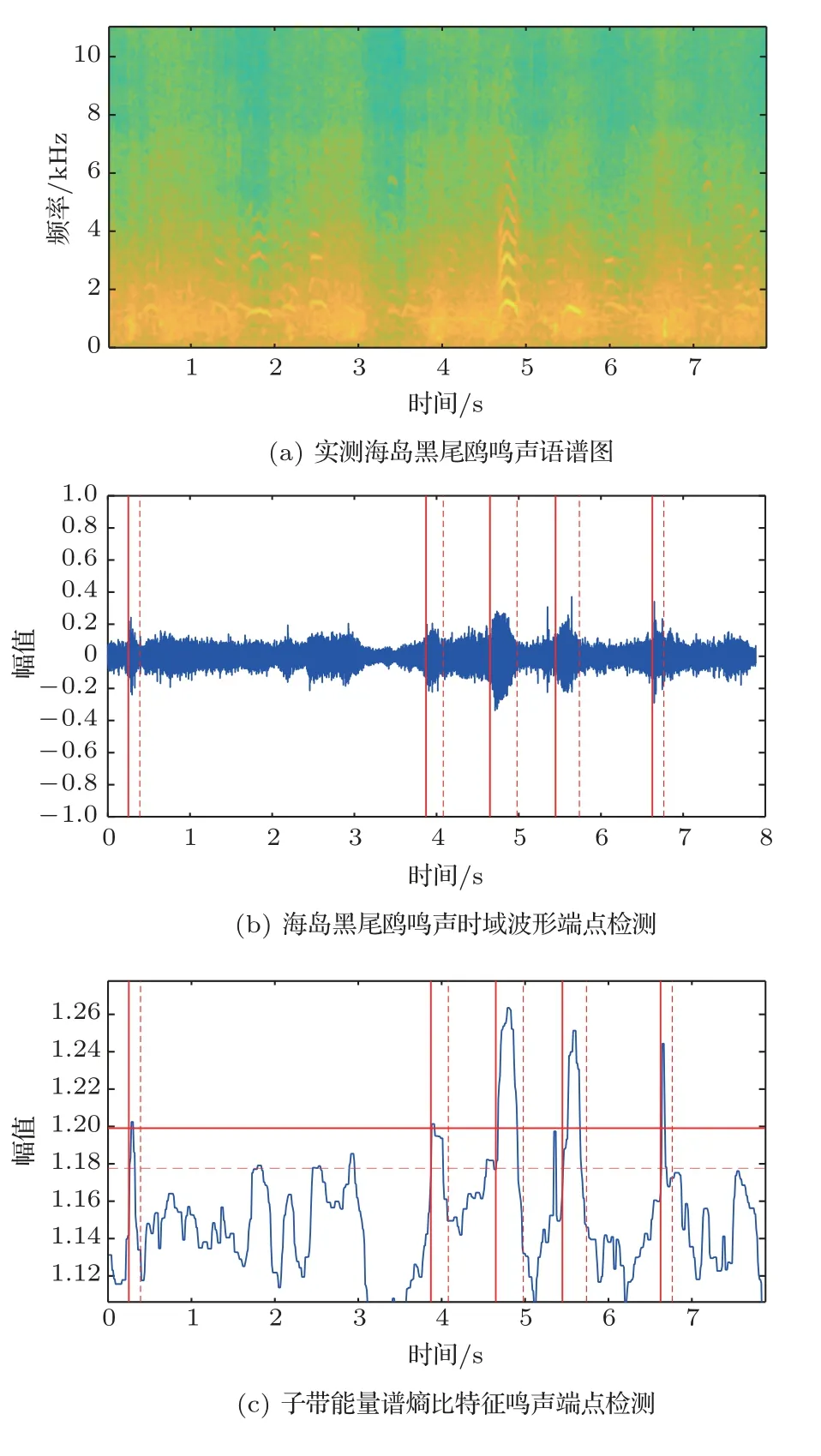
圖6 現(xiàn)場(chǎng)海浪噪聲條件下的鳥鳴聲檢測(cè)結(jié)果Fig.6 Birdsong detection with wavessound on island
4 結(jié)論
在海島濕地等自然保護(hù)區(qū)棲息地環(huán)境噪聲復(fù)雜且信噪比低,基于聲學(xué)方法的鳥類活動(dòng)鳴聲全天候?qū)崟r(shí)在線監(jiān)測(cè)是生態(tài)監(jiān)測(cè)領(lǐng)域的一個(gè)難題。本文采用球形結(jié)構(gòu)的七元陣圓形陣列無線傳感器系統(tǒng),在現(xiàn)場(chǎng)保障設(shè)施有限的情況下,為減少系統(tǒng)傳輸負(fù)擔(dān)及不必要的電能消耗,提出了基于子帶能量譜熵比的動(dòng)態(tài)雙門限方法,對(duì)仿真和海島現(xiàn)場(chǎng)實(shí)測(cè)數(shù)據(jù)的鳥類活動(dòng)鳴聲段的起止端點(diǎn)檢測(cè)進(jìn)行了驗(yàn)證和分析。實(shí)驗(yàn)表明,本算法在不同低信噪比環(huán)境下的鳥鳴聲端點(diǎn)檢測(cè)準(zhǔn)確率較高,在海島環(huán)境下具有良好的魯棒性。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25