基于局部軟約束優(yōu)化的無人機航跡規(guī)劃方法
2022-07-08 01:50:02陳朋江勇奇俞天緯黨源杰宦若虹
華南理工大學學報(自然科學版) 2022年6期
陳朋 江勇奇 俞天緯 黨源杰 宦若虹
(1.浙江工業(yè)大學 計算機科學與技術(shù)學院,浙江 杭州 310023;2.浙江工業(yè)大學 信息工程學院,浙江 杭州 310023)
近年來,隨著無人機(UAV)廣泛地應用于空中拍攝、災后救援和城市安防等各種場景,人們對無人機自主導航能力的要求也逐漸提高,尤其是在長距離導航方面。航跡規(guī)劃是實現(xiàn)無人機自主導航的關鍵技術(shù)之一,其可分為前端路徑搜索和后端軌跡優(yōu)化[1]。前端通過路徑搜索算法獲得空間上無碰撞的初始路徑,但缺少在時域上對無人機速度和加速度的設定;后端則在前端基礎上進行優(yōu)化,生成更加平滑、安全且適合無人機動態(tài)飛行的軌跡。
前端路徑搜索主要分為基于采樣的和基于圖搜索的兩類方法。基于采樣的代表算法快速探索隨機樹(RRT)[2]從配置空間中隨機地抽取樣本,并引導樹向目標生長。雖然RRT算法能夠有效地找到可行的路徑,然而沒有漸近最優(yōu)性。Karaman等[3]提出了基于采樣的漸進最優(yōu)方法RRT*,隨著樣本數(shù)的增加,該算法最終會收斂到全局最優(yōu)解。基于采樣的方法雖能有效地解決了復雜約束的路徑規(guī)劃問題,但算法效率不穩(wěn)定。基于圖搜索的方法雖未必能找到最優(yōu)路徑,但效率極高且穩(wěn)定,更符合無人機的實時要求。基于圖搜索的代表算法A*將配置空間離散化,把路徑搜索問題轉(zhuǎn)化為圖搜索問題,根據(jù)圖中節(jié)點代價尋找最優(yōu)路徑[4]。近年來人們通過改進算法A*來解決相應的實際問題。Dolgov等[5]提出了基于物體實際運動約束的混合A*算法,生成符合車輛運動規(guī)律的軌跡。張慶等[6]通過融合跳點搜索(JPS)策略來改進A*算法,大大減少了拓展的節(jié)點和尋路算法的內(nèi)存消耗。但上述對A*算法的改進較為復雜,目前還只應用于二維地圖。而Theta*算法[7]利用視線檢查改進A*算法并且適用于三維環(huán)境。該算法在遍歷節(jié)點時檢測當前節(jié)點和上個節(jié)點的父節(jié)點之間的線空間中是否存在視線,若存在,則刪除中間節(jié)點以獲得比A*算法更短的路徑。但Theta*算法僅通過簡單的避障檢測并沒有解決A*算法遺留的安全問題,且節(jié)點代價計算方式尚未考慮到無人機轉(zhuǎn)彎情況。
后端軌跡優(yōu)化一般先把軌跡表示成以時間為變量的分段多項式形式[8],然后通過設計目標函數(shù)和添加相應的約束條件進行優(yōu)化。目前許多軌跡優(yōu)化方法被提出來,并逐漸形成兩種流派:硬約束法[9-12]和軟約束法[13-14]。硬約束法主要是將軌跡表達式設為目標函數(shù),并通過構(gòu)建飛行走廊來添加硬性的約束條件,即目標函數(shù)中的解必須要滿足這些條件。根據(jù)飛行走廊的形狀,硬約束法可分為長方體法[9-10]、球體法[11]和多面體法[12]。以長方體法為例,首先將前端算法獲得的每個航路點構(gòu)造為小立方體,然后延伸這些立方體的面,直到它們接近障礙物,形成一條走廊,再設計最小變加速度目標函數(shù),結(jié)合走廊約束條件,形成凸二次規(guī)劃問題進行求解。軟約束法則直接將約束條件設計成目標函數(shù),因此這些約束條件只需要傾向于滿足即可,但為了生成可靠的軌跡,需利用環(huán)境信息構(gòu)建歐氏符號距離場(ESDF)以提取梯度信息來加強約束。Zhou等[13]利用B樣條的凸包性質(zhì),將梯度信息和動力學約束結(jié)合為目標函數(shù),提高了軌跡的平滑度和安全性。Lin等[14]和筆者前期工作[1]中利用環(huán)境梯度信息最小化碰撞代價、平滑度和動力學可行性的損失函數(shù),以獲得最佳軌跡。硬約束法雖然可以利用飛行走廊避免碰撞,但依舊容易生成靠近障礙物的軌跡,而軟約束法在一定導航距離內(nèi)可100%生成安全性更高的軌跡。但若目標點距起點較遠,環(huán)境更復雜,建立ESDF所要處理的信息量更大,軟約束法效率和成功率也會明顯下降[15]。另外,近年來不少優(yōu)化無人機飛行速度的時間分配方案被提出。Gao等[16]提出了一種基于離散變量的時間分配方法,將優(yōu)化問題轉(zhuǎn)化為凸二次錐規(guī)劃(SOCP)并求解。Zhang等[17]首次針對非凸輸入約束提出了基于四旋翼微分平坦度特性的時間最優(yōu)規(guī)劃方法。
為了提高無人機在長距離導航中的規(guī)劃效率和飛行效率,本文提出了基于局部軟約束優(yōu)化的無人機航跡規(guī)劃方法。首先基于改進的Theta*算法獲取初始軌跡,并針對原算法的安全問題加入了安全距離約束,同時增加對擴展節(jié)點轉(zhuǎn)彎代價的計算;然后提出了高效局部優(yōu)化策略以限制ESDF構(gòu)建范圍和時間,采用軟約束法對初始軌跡中低質(zhì)量片段進行優(yōu)化,而對高質(zhì)量片段僅做簡單的平滑處理,同時分別針對軌跡中的直線段和曲線段設計了低階和高階的時間分配來提升無人機的飛行速度;最后通過仿真和實際飛行來測試本文方法的性能。
1 基于改進Theta*的路徑搜索算法
本文提出的無人機航跡規(guī)劃方法框架見圖1,包括前端路徑搜索和后端軌跡優(yōu)化。改進Theta*算法的流程圖如圖2所示,相比于前期工作[1],Theta*算法利用視線檢查機制能刪減更多的冗余節(jié)點,如圖3(b)和3(c)所示,因而本文算法沿用了該機制。另外,受文獻[18]的啟發(fā),本文將視線檢查提前而非放在最后進行,這樣只需檢查上一個節(jié)點的最優(yōu)鄰節(jié)點而不必檢查每個鄰節(jié)點,從而減少多余的檢查工作。同時,為了獲取高質(zhì)量的初始軌跡,加入了安全距離約束和轉(zhuǎn)彎代價函數(shù)。
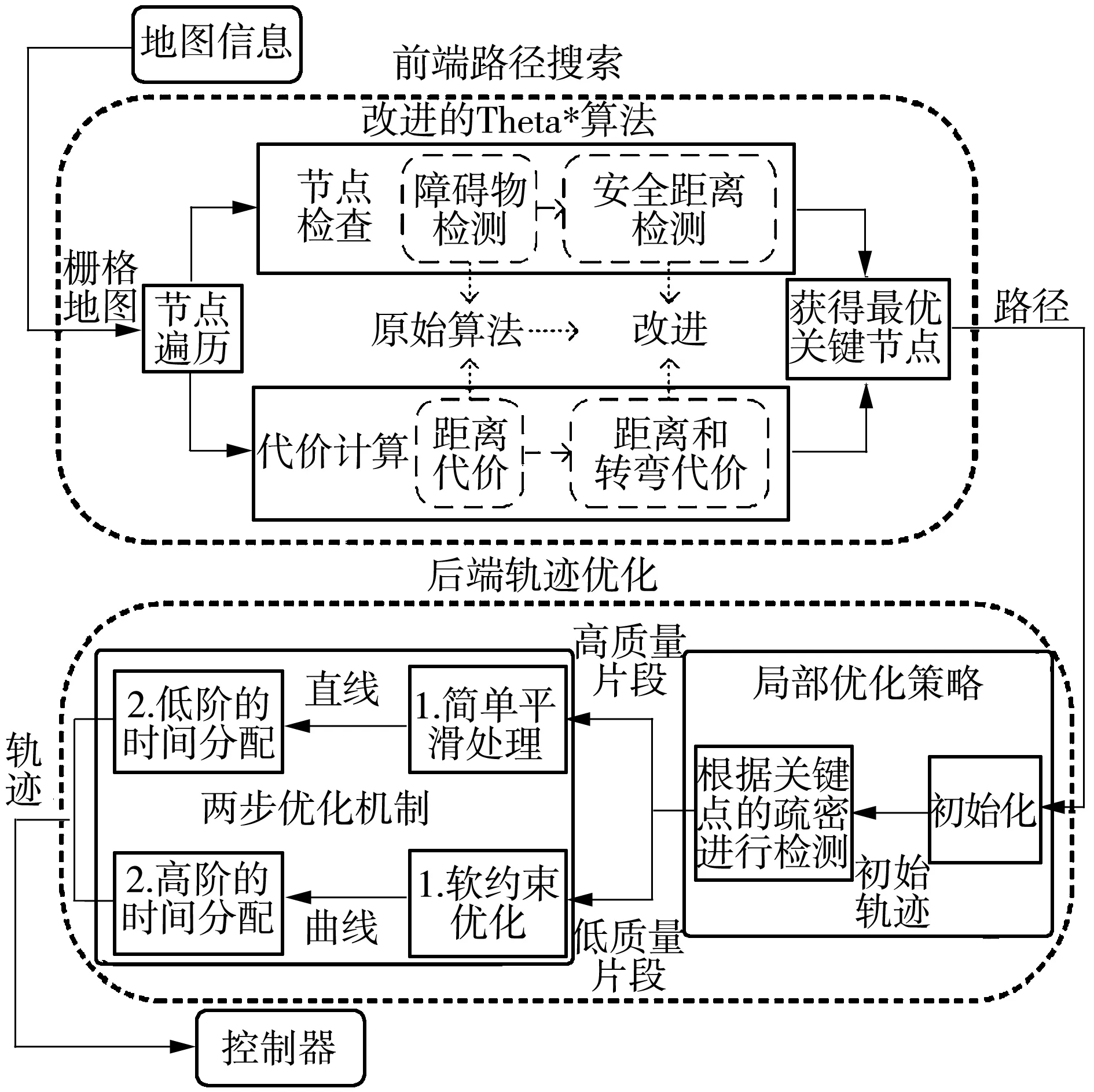
圖1 本文航跡規(guī)劃方法的框架Fig.1 Framework of the proposed trajectory planning method
1.1 安全距離約束
如圖3(c)所示,關鍵節(jié)點仍然靠近障礙物,但實際中無人機并不是節(jié)點,存在一定體積,很可能會與障礙物相撞。為了解決這個問題,在視線檢查和安全檢查中的節(jié)點檢查部分用安全距離檢測代替障礙物檢測,如圖2所示。具體檢測步驟如下:首先提取離被檢測節(jié)點在dc以內(nèi)的節(jié)點,dc即為安全距離;然后檢查這些節(jié)點是否為障礙物,其中屬于集合P和C中的節(jié)點不需要再次檢查,因為這些節(jié)點已經(jīng)在之前的循環(huán)中檢查過了。在安全檢查中,通過安全距離檢測來檢查當前節(jié)點及其相鄰節(jié)點是否與障礙物保持安全距離,以確保由Theta*算法獲得的關鍵節(jié)點的安全;在視線檢查中,通過安全距離檢測檢查連接相鄰關鍵節(jié)點的線路上的節(jié)點是否安全,以確保連接線路也安全。圖3(d)中的虛線區(qū)即為安全距離約束下獲得的安全區(qū)域,整個路徑都能與障礙物保持一定的距離,使無人機有足夠的飛行空間。但是安全距離r的值要相對較小,若超過一定閾值,會使算法的搜索效率大大下降,所以需要根據(jù)實際飛行要求設定r為相對較小且能保證安全的值。
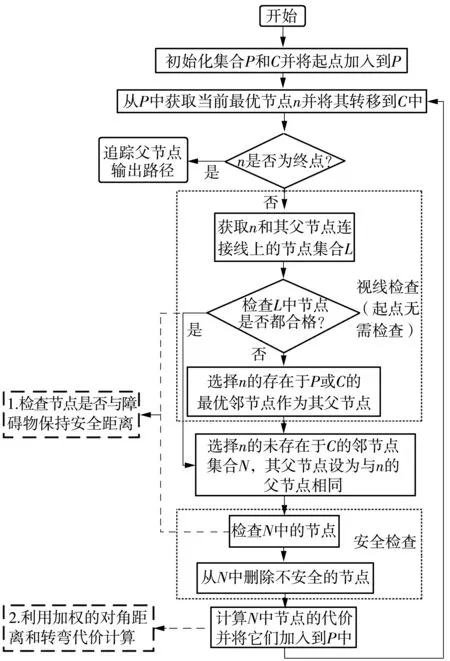
圖2 改進Theta*算法的流程圖Fig.2 Flow chart of the improved Theta* algorithm

圖3 不同算法的路徑Fig.3 Paths of different algorithms
1.2 代價函數(shù)的改進
Theta*算法遵循A*算法的總代價函數(shù)f(ni),為
f(ni)=g(ni)+h(ni)
(1)
式中,g(ni)為節(jié)點ni和起點之間的代價函數(shù),h(ni)為ni和終點ngoal之間的代價函數(shù)(即啟發(fā)式函數(shù))。文中g(shù)(ni)和h(ni)的代價計算是相同的:
g(ni)=g(ni-1)+H(ni-1,ni)
(2)
h(ni)=H(ni,ngoal)
(3)

(4)
為了便于算法的實現(xiàn),將環(huán)境視為三維網(wǎng)格地圖[19]。因此,采用對角距離來計算成本,比曼哈頓距離更精確,而且避免了歐氏距離中的平方根運算。設dx、dy、dz是節(jié)點ni和nj的三維坐標之差,dmin、dmed、dmax是它們的最小值、中值和最大值,則hd(ni,nj)定義為
|dmax-dmed|
(5)

此外,考慮飛行中轉(zhuǎn)彎帶來的能量消耗和時間消耗,本文設計了轉(zhuǎn)彎代價函數(shù)ht(ni,nj)。計算出節(jié)點ni和其父節(jié)點ni.p構(gòu)成的向量vni.p→ni與節(jié)點ni和nj構(gòu)成的向量vni→nj之間的夾角,即得到無人機在當前節(jié)點ni的真實轉(zhuǎn)彎角度,并表示為弧度作為轉(zhuǎn)彎代價的值,即
(6)
2 高效的軌跡優(yōu)化方法
2.1 局部優(yōu)化策略
前端算法中有安全距離的約束,使初始路徑存在一定的安全保障,故不需要對整個路徑進行優(yōu)化,即可以采取局部優(yōu)化策略來減少優(yōu)化工作和提升方法效率。
首先,本文用s段貝塞爾曲線來表示軌跡:
(7)
(8)

初始路徑由若干個關鍵點(起點、終點和拐點)組成,因此先采用1階貝塞爾曲線(即直線)連接相鄰關鍵點形成初始軌跡。但這樣的軌跡存在如下問題:①拐點處不平滑;②在拐點密集處(如圖4中虛線圓內(nèi)),障礙物也密集,無人機發(fā)生碰撞的概率較大,存在安全隱患;③采用低階貝塞爾曲線對拐點密集處同時進行時間分配和平滑處理是困難的。因此,本文考慮對超過一個拐點的局部進行進一步優(yōu)化,并用高階貝塞爾曲線表示,而其他部分(如局部單個拐點)只用低階貝塞爾曲線進行簡單的平滑處理,未優(yōu)化的直線部分則保留。整個局部優(yōu)化策略算法描述如下:
{輸入:初始軌跡。
輸出:最終軌跡。
初始化:從初始軌跡中提取包括關鍵點在內(nèi)的等間距航點(如圖4所示,航點個數(shù)根據(jù)軌跡長度和航點間距大小而定),并從起點到終點依次存入W數(shù)組。W數(shù)組中關鍵點的索引按順序存儲在K數(shù)組中。這樣關鍵點的間距
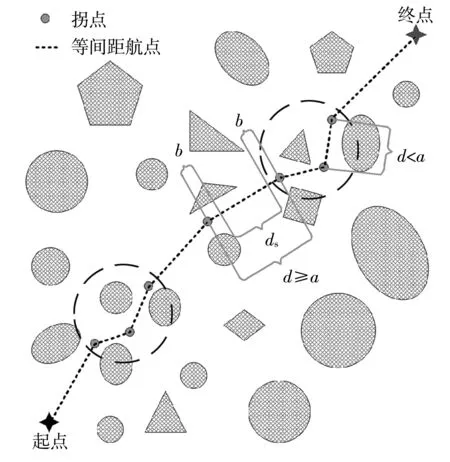
圖4 局部優(yōu)化策略Fig.4 Local optimization strategy
d可以通過索引相減獲得的航點個數(shù)來表示,相比歐氏距離的計算,此方法減少了計算量,同時調(diào)參更方便。
局部優(yōu)化檢測(省略對起點和終點的處理)
fori=1 ton-1 do ∥n為關鍵點個數(shù)且大于3
forj=i+1 ton-1 do
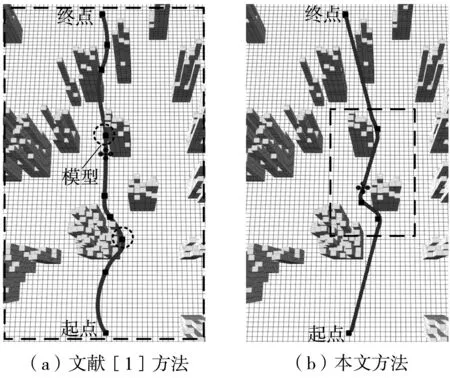
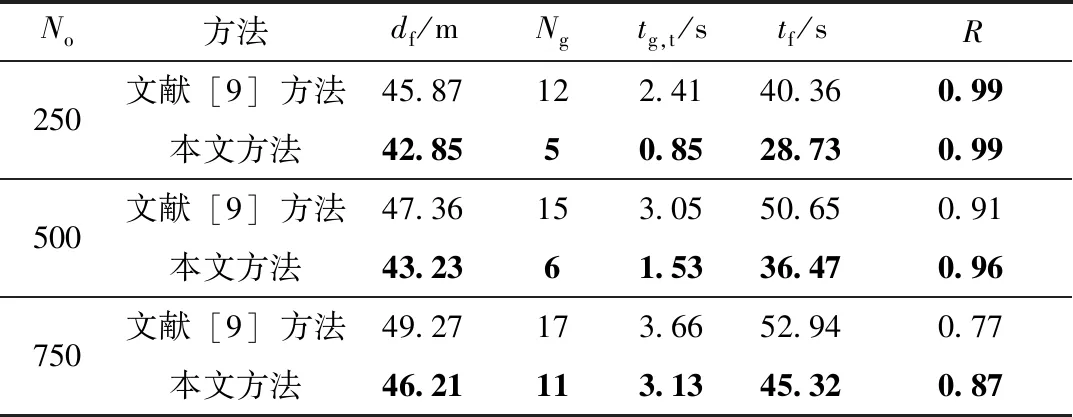
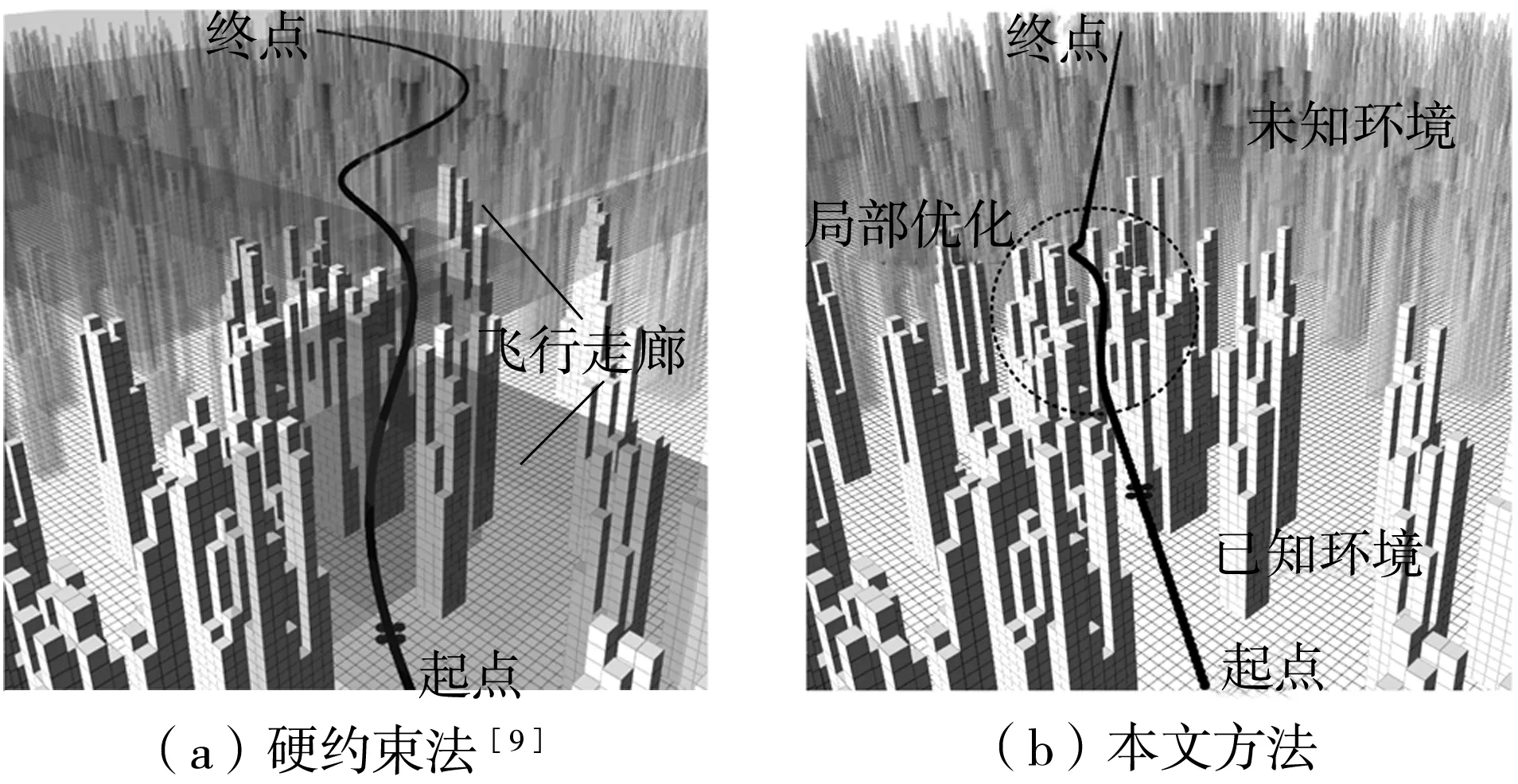
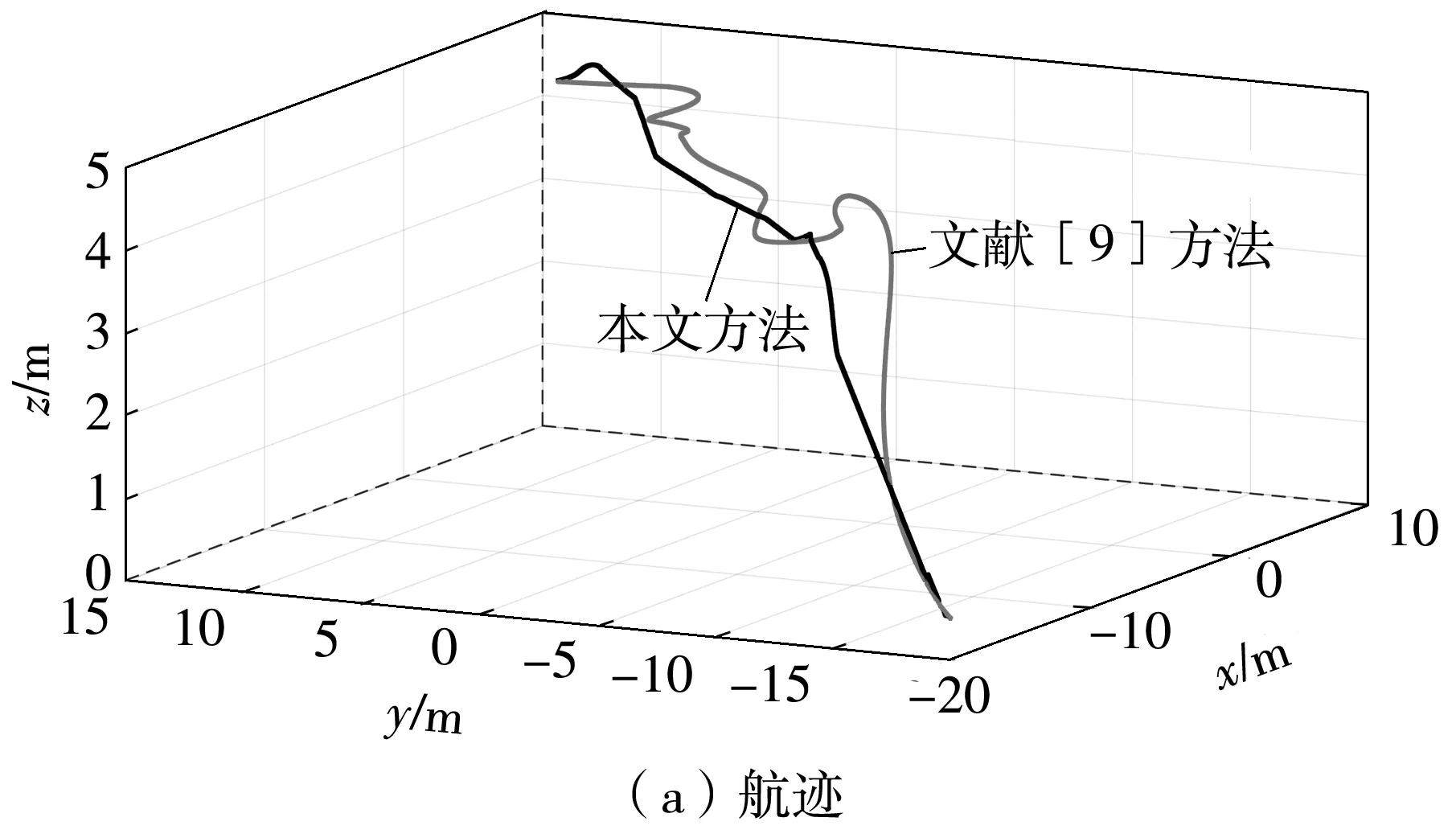
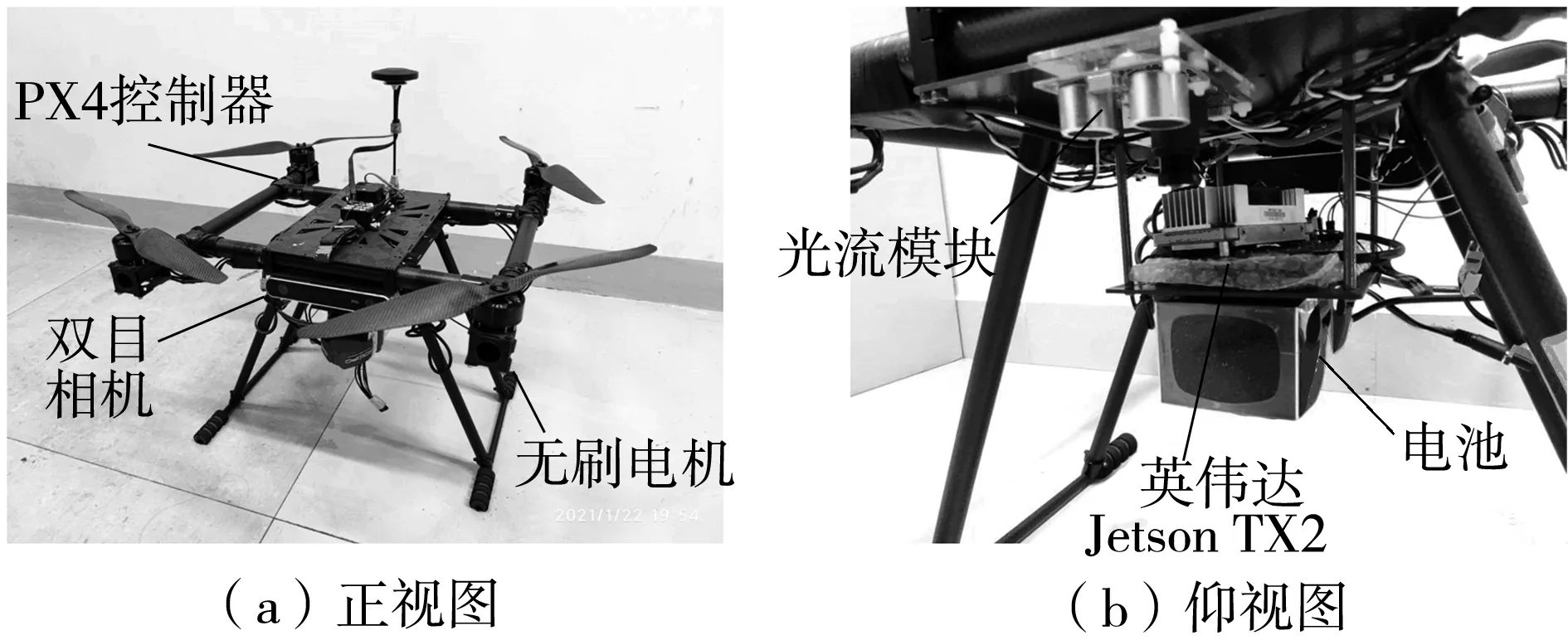
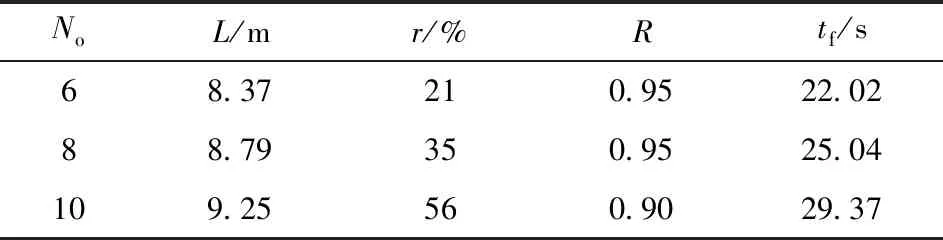
if (K[j]-K[j-1]) else break; end for if(j==i+1) 此時拐點W[K[i]]與下一個拐點W[K[i+1]]的間距大于a個航點間距,W[K[i]-b]、W[K[i]]、W[K[i]+b]被作為2階貝塞爾曲線的控制點,對相應的軌跡片段進行平滑處理; else 此時拐點W[K[i]],W[K[i+1]],…,W[K[j]]的間距d都小于a個航點間距,這些拐點與W[K[i]-b]、W[K[j]+b]被作為局部軟約束優(yōu)化的關鍵點,對相應的軌跡片段進行優(yōu)化; /*提取W[K[i]-b]和W[K[j]+b]兩個航點是為了保證未優(yōu)化的直線段和優(yōu)化后的曲線段連接處的平滑性,具體優(yōu)化方法詳見2.2節(jié)*/ i=j;∥從j開始繼續(xù)循環(huán) end for} a值決定了局部優(yōu)化范圍,b值決定了平滑范圍。平滑一般只處理直線、曲線的連接處,范圍較小,實驗中b的范圍為[2,4]。a越大,軌跡中局部優(yōu)化范圍越大,直線段數(shù)量越少,算法效率越低,因此a不宜過大;a越小,軌跡優(yōu)化效果越不明顯,會影響安全性。另外,為了讓無人機在直線段有足夠的距離加減速,以保證直線、曲線之間的速度連續(xù)性,直線段長度ds(如圖4所示)需滿足 (9) 式中:dl為航點間距,實驗中設為0.1 m;vmax、amax分別為無人機最大的速度和加速度。因此a也與無人機設定有關,實驗中a的范圍為[10,30]。 在優(yōu)化前需先構(gòu)建歐氏符號距離場(ESDF),它能為其所在范圍內(nèi)每一個體素提供該體素與最近障礙物的歐氏距離,一般采用截斷距離法[20]構(gòu)建。因為局部優(yōu)化只需要局部的障礙物信息,所以只需構(gòu)建局部ESDF而非全局,這樣也能減少相應的規(guī)劃時間。首先采用局部優(yōu)化策略得到某個軌跡段的所有關鍵點坐標(xi,yi,zi)|i=1,2,…,n,分別比較它們的x、y、z坐標值,得到x、y、z坐標的最小值和最大值(xmin、xmax、ymin、ymax、zmin、zmax)。然后根據(jù)坐標軸上這6個值處的垂直平面,構(gòu)建一個包含該軌跡片段的長方體,再對長方體膨脹一定體積,將周圍較近的障礙物囊括進來。這樣根據(jù)該長方體及其所包含的障礙物信息就可以構(gòu)建局部的ESDF。 在優(yōu)化中實施了兩步優(yōu)化機制,即將軌跡優(yōu)化問題分解成空間和時間上的優(yōu)化,該機制的效果已在文獻[16]中得到驗證。時間上的優(yōu)化就是通過對時間參數(shù)的設定來限制無人機的速度和加速度,也就是本文所謂的時間分配。為了減少重復的工作,在優(yōu)化中只需要對軌跡在空間上的位置進行限制,時間參數(shù)和無人機速度則被設置為常量,構(gòu)建如下目標函數(shù): ming=β1gs+β2gc (10) 式中:gs為加強軌跡平滑性的平滑項;gc為限制軌跡碰撞保證安全性的碰撞項;β1和β2為權(quán)重,實驗中分別設置為2.0和1.5。 本文將平滑項gs表示成加速度二階導數(shù)的形式,即軌跡fμ(t)的4階導數(shù)的平方對時間t的積分,具體形式如下: (11) 式中:[ti-1,ti]為局部軌跡片段的時間范圍;fμ(t)為m段n階多項式(實驗中n=5),m為該局部的關鍵點個數(shù)減1,即每段多項式表示相鄰關鍵點間的軌跡段。 碰撞項采用可微函數(shù)c(·)沿航跡弧長的線性積分來表示,同時本文將c(·)設計成指數(shù)函數(shù),即 c(dp(t))=αe-γ(dp(t)-d0) (12) 式中:dp(t)為t時刻無人機的位置p(t)與最近障礙物的距離,由所構(gòu)建的ESDF直接獲得;d0為安全距離閾值;α為函數(shù)的幅值;γ為變化率。根據(jù)該函數(shù)c(·),當無人機與最近障礙物的距離小于安全距離d0時,函數(shù)值能迅速變得很大,使碰撞項成為整個目標函數(shù)的主導項;而當距離大于d0時,函數(shù)值趨于平緩且相對較小,這樣就能使軌跡與障礙物保持安全距離。因此gc的具體形式如下(為了方便計算,積分最終離散化為求和形式): (13) 其中,l為該軌跡段的長度,Ti=ti-ti-1為該軌跡段的時間參數(shù),Γk=ti-1+kδt為離散的時間變量,v(·)為無人機某時刻的速度。 上述平滑項和碰撞項的具體二次型形式和它們的雅可比矩陣推導可參考文獻[1],這里不再贅述。而對于該優(yōu)化問題的求解,本文采用凸可分近似算法(CCSA)[21]。該算法不僅適用于大量變量的優(yōu)化,而且能保證從任何起始點開始都能收斂到某個局部最小值。 (14) 因此第j段的速度貝塞爾曲線可由式(8)推得 (15) 同理,第j段的加速度貝塞爾曲線可由速度貝塞爾曲線的速度特性推得,這里不再贅述。根據(jù)速度和加速度貝塞爾曲線可知,時間參數(shù)越小,無人機速度和加速度越大,完成相應軌跡的飛行所需時間越短,但由于無人機有最大速度和加速度的限制,每個時間參數(shù)理論上都有一個最小值。 經(jīng)過簡單平滑處理和局部優(yōu)化后,本文方法獲得的軌跡是由低階多項式(1階、2階)和高階多項式(5階)組合表示的,因此設計了包含低階和高階時間分配的方法。本文先實現(xiàn)高階時間分配再實現(xiàn)低階時間分配,這樣約束較多的高階時間分配可以避免考慮相鄰軌跡段間速度連續(xù)的問題。在高階時間分配中,本文直接采用文獻[16]的時間分配框架,調(diào)整了該框架的輸入輸出,其中以軌跡段的控制點位置、初始時間參數(shù)、最大速度和最大加速度為輸入,以最優(yōu)時間參數(shù)、該軌跡段起點初速度和終點末速度為輸出。 在低階時間分配中,軌跡段主要包含表示直線的1階貝塞爾曲線和表示直線間小段彎弧的2階貝塞爾曲線,其中2階曲線較短,只需為其設置相對合理的時間參數(shù)、初速度和末速度。而對于直線段軌跡,它的長度ds如圖4所示,往往接近或大于a個航點間距,足以為其劃分出3個區(qū)域:加速區(qū)、勻速區(qū)和減速區(qū)。因此本文重新表示該軌跡段,其中加速區(qū)和減速區(qū)用2階貝塞爾曲線表示(有加速度,階數(shù)必須大于1),勻速區(qū)用1階貝塞爾曲線表示,而且它們的控制點都在該直線上。這樣無人機在該直線段軌跡上先從初速度vs加速到最大速度vm進行勻速飛行,再減速到末速度ve進入下一段軌跡,其中加減速時的加速度為最大加速度am,vs、ve由與該直線段相鄰的曲線段在前面所述的時間分配后提供。然后計算得到加速區(qū)、勻速區(qū)和減速區(qū)的長度d1、d2、d3及對應的時間參數(shù)t1、t2、t3(d為該直線段總長): (16) 最后根據(jù)這些已知量和式(15),可以求得表示這3個區(qū)域的多項式中控制點的具體位置。另外,若無人機飛行中發(fā)生重規(guī)劃,那起點處是有初速度的。大部分情況下只需在重規(guī)劃的時間分配中加入初速度限制即可,但若初速度較大且方向與重規(guī)劃后的軌跡方向誤差較大,本文考慮讓無人機降速至0再進行重規(guī)劃。 本文基于機器人操作系統(tǒng)(ROS)框架和C/C++語言實現(xiàn)規(guī)劃方法。實驗平臺配置如下:處理器為Intel(R) Core(TM) i5-6500(3.20 GHz×4),內(nèi)存為16 GB,系統(tǒng)版本為Ubuntu 18.04。實驗中采用了文獻[9]開源的四旋翼模型,其輸入為當前時刻t的位置、速度和加速度向量,這些輸入量可從規(guī)劃方法所生成的軌跡及其相應的表達式獲得。模型感知范圍是以模型為中心的圓,感知半徑可人為設置。地圖是障礙物隨機分布的三維場景(50 m×50 m×6 m)。實驗從單次規(guī)劃和多次規(guī)劃兩種情況對本文方法進行測試,最大速度和加速度分別為2 m/s和2 m/s2,數(shù)據(jù)都是30次實驗的平均值,其中關鍵點數(shù)為Nk,軌跡長度為L,飛行時間為tf,軌跡合格率為R,規(guī)劃時間為tg(包括了ESDF時間tESDF和前后端時間tba),障礙物數(shù)為No,飛行距離為df,規(guī)劃次數(shù)為Ng,規(guī)劃總時間為tg,t。 3.1.1 單次規(guī)劃的性能測試 表1 單次航跡規(guī)劃的性能測試結(jié)果Table 1 Performance test results of single trajectory planning 表2 不同轉(zhuǎn)彎代價權(quán)值下的測試結(jié)果Table 2 Test results under different turn cost weights 圖5 單次航跡規(guī)劃效果Fig.5 Effect of single trajectory planning 3.1.2 多次規(guī)劃的性能測試 未知環(huán)境是指無人機還未感知的環(huán)境。當目標點在較遠的未知環(huán)境中,無人機飛行時感知的環(huán)境會不斷更新(仿真中更新頻率為50 Hz),若已規(guī)劃出來的航跡碰到更新后的障礙物就會進行重規(guī)劃,因此需要多次規(guī)劃才能到達目標點。在實際應用中,無人機感知范圍有限(一般在20 m以內(nèi),實驗中設置為10 m),目標點距離往往較遠,故對規(guī)劃方法在長距離中實現(xiàn)多次規(guī)劃的性能測試是有必要的。文獻[1]方法由于需要構(gòu)建全局ESDF,在更長距離的規(guī)劃中效率極低,很難達到實時要求,因此采用本文方法與當前經(jīng)典且開源的硬約束法[9](兩者單次規(guī)劃效果差距不明顯)分別做了障礙物數(shù)為250、500和750的3組實驗(規(guī)劃距離約為40 m),結(jié)果如表3、圖6和圖7所示。從表3中可知,無論哪組實驗,本文方法的飛行距離、規(guī)劃效率(規(guī)劃總時間和次數(shù))和飛行效率(飛行時間)均優(yōu)于硬約束法。在飛行距離方面,因為硬約束法的前后端都沒有對軌跡長度加以限制,其后端中也是全局構(gòu)建飛行走廊,在未知環(huán)境中容易生成冗余的軌跡(如圖6(a)所示),在重規(guī)劃前,無人機會按該冗余軌跡飛行,而本文方法的前端能搜索出最短路徑,且后端只進行局部優(yōu)化,未知環(huán)境中基本上是直線軌跡(如圖6(b)所示)。從圖7(a)可知,本文方法的整個飛行航跡明顯比硬約束法簡短,轉(zhuǎn)彎幅度也小很多。在規(guī)劃效率方面,因為未知環(huán)境中軌跡越長,撞到更新后的障礙物概率越大,規(guī)劃次數(shù)也越多,同時,軌跡合格率較低也會使規(guī)劃次數(shù)增加。雖然硬約束法的單次規(guī)劃效率可能更高,但由于其規(guī)劃次數(shù)多,故規(guī)劃總時間要多于本文方法。在飛行效率方面,除了飛行距離的優(yōu)勢外,本文方法的最大優(yōu)勢是時間分配的合理性,曲線段和直線段軌跡都采用了高效的時間分配,如圖7(b)所示,本文方法盡可能利用最大加速度進行加減速,讓無人機在直線段軌跡中更多地進行最大速度的勻速飛行,而硬約束法利用速度場獲取相對合理的時間參數(shù),過于保守。在軌跡合格率方面,因障礙物較少,兩種方法的效果都很好,但隨著障礙物的增加,硬約束法的合格率會下降得更快,因為飛行走廊只是邊界約束,允許軌跡貼近該邊界(即貼近障礙物),而本文方法前端加入安全距離約束,后端對障礙物密集的地方進行軟約束優(yōu)化進一步加強安全性,軟約束通過構(gòu)建ESDF所帶來的安全效益要優(yōu)于飛行走廊。不過如果障礙物個數(shù)超過1 000,關鍵點數(shù)增加,局部構(gòu)建ESDF的范圍也會變大,軟約束優(yōu)化的效率和精度也會明顯下降。 表3 多次航跡規(guī)劃的性能測試結(jié)果Table 3 Performance test results of multiple trajectory planning 圖6 不同規(guī)劃方法生成的航跡對比Fig.6 Comparison of tracks generated by different planning methods 圖7 兩種方法的無人機航跡、速度對比Fig.7 UAV track and speed comparisons of two methods 本文搭建圖8所示的四旋翼平臺。該平臺配備了一個英偉達Jetson TX2,它包含一個由256個CUDA內(nèi)核組成的圖形處理器,有8 GB的隨機存儲內(nèi)存和32 GB的eMMC存儲空間。本文將PX4的開源硬件Pixhawk2用作飛行控制器,并通過UART接口將TX2的無人機控制命令發(fā)送給Pixhawk2,實現(xiàn)飛行控制。本文在TX2中構(gòu)建了Ubuntu 16.04操作系統(tǒng)并基于ROS框架實現(xiàn)圖1所示的航跡規(guī)劃框架。本文還搭建了圖9所示的室內(nèi)場景,障礙物大小相同且都是長方體。本文只測試航跡規(guī)劃的效果,所以每次飛行前地圖通過1∶1人工構(gòu)建,四旋翼起點和終點在地圖中固定,相距約8 m,只需進行單次規(guī)劃。對于規(guī)劃方法生成的航跡,本文采用幾何控制器[22]進行跟蹤。另外,四旋翼飛行中可通過雙目相機獲取其與障礙物的距離來檢測航跡規(guī)劃算法的安全性。光流模塊則用于室內(nèi)定位。 圖8 四旋翼平臺Fig.8 Quadrotor platform 飛行中設定最大速度和加速度分別為0.5 m/s和0.5 m/s2,本文方法的室內(nèi)航跡規(guī)劃效果見圖9,虛線框內(nèi)為局部優(yōu)化后實現(xiàn)的曲線飛行,實驗中四旋翼無碰撞到達終點,且始終與障礙物保持一定的距離,其tESDF和tba分別為0.095 s和0.150 s。另外,本文統(tǒng)計了不同障礙物數(shù)下的飛行結(jié)果,如表4所示,每個數(shù)據(jù)都是進行20次飛行的平均值,其中r為曲線占比。從表中可知,隨著障礙物的增加,后端優(yōu)化后的曲線占比也增加,這保證了軌跡合格率始終在0.9及以上,并且四旋翼按合格軌跡飛行時無碰撞發(fā)生,但軌跡長度和飛行時間也有所增加。該結(jié)果證明了本文方法可根據(jù)障礙物疏密程度切換直線和曲線兩種飛行模式,其中直線飛行速度接近0.4 m/s,而曲線飛行速度低于0.3 m/s,這樣能同時保證較高的飛行安全性和飛行效率。 表4 四旋翼室內(nèi)飛行結(jié)果Table 4 Results of quadrotor indoor flight 針對無人機長距離航跡規(guī)劃效率不高的問題,本文提出了一種基于局部軟約束優(yōu)化的實時無人機航跡規(guī)劃方法。該方法分為前端和后端兩個階段:前端通過安全距離約束和轉(zhuǎn)彎代價函數(shù)改進Theta*算法,獲取高質(zhì)量的初始路徑;后端設計局部優(yōu)化策略減少優(yōu)化工作,并對局部質(zhì)量不高的軌跡片段進行軟約束優(yōu)化加強安全性和平滑性,然后根據(jù)貝塞爾曲線的速度特性實現(xiàn)高效的時間分配,以提升飛行效率。實驗結(jié)果表明:本文方法克服了前期工作中無法實現(xiàn)高效的長距離規(guī)劃問題;與現(xiàn)有的經(jīng)典硬約束法相比,在約40 m距離的飛行中,本文方法的無人機飛行距離要短3 m左右,飛行時間少7 s多,規(guī)劃總時間少0.5 s以上。實際的室內(nèi)飛行實驗也驗證了本文方法在真實系統(tǒng)中的適用性。 本文方法提升了無人機的整體飛行速度,但其安全性只在靜態(tài)環(huán)境中有保障,對于動態(tài)環(huán)境中高速飛行的緊急避障性能還有待提高。在今后工作中,可以考慮采用精度更高的B樣條曲線來表示航跡,利用其局部修改性質(zhì)來避免全局重規(guī)劃,以提升整體規(guī)劃效率,完善緊急避障功能。2.2 局部軟約束優(yōu)化
2.3 時間分配
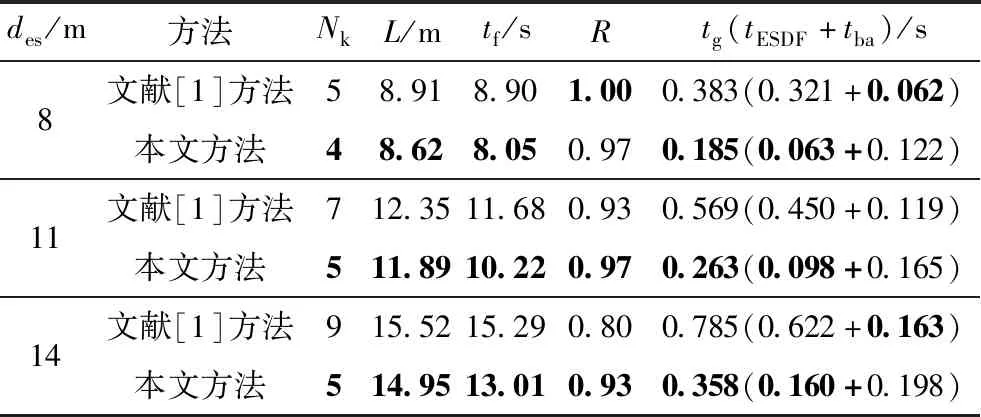
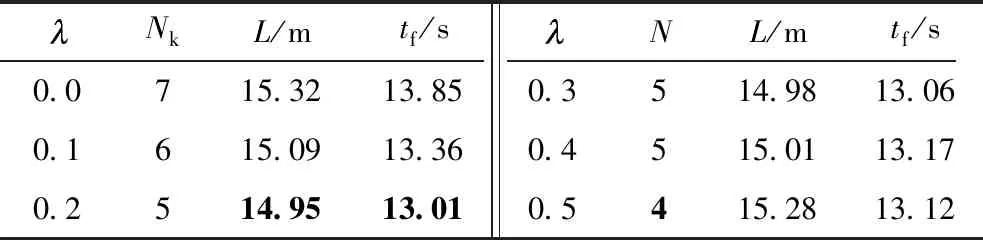
3 實驗及結(jié)果分析
3.1 仿真實驗
3.2 室內(nèi)飛行實驗
4 總結(jié)與展望
猜你喜歡
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
Coco薇(2016年2期)2016-03-22 02:42:52
中國工程咨詢(2016年4期)2016-02-14 07:28:28
Coco薇(2015年1期)2015-08-13 02:47:34