全智能非接觸式弓網(wǎng)在線檢測系統(tǒng)在軌道交通運(yùn)營車輛上的應(yīng)用研究
2022-07-11 10:23:32劉冶
中國設(shè)備工程 2022年13期
劉冶
(北京運(yùn)達(dá)華開科技有限公司,北京 102200)
隨著既有軌道交通運(yùn)營進(jìn)入問題高發(fā)期,線路規(guī)劃爆發(fā)式增長,供電線路運(yùn)營、維護(hù)等多個方面需打造智能化檢測平臺,傳統(tǒng)人工檢查費(fèi)時(shí)費(fèi)力已無法保證質(zhì)量和日益增長的需求,迫切需要研制一套全智能的弓網(wǎng)檢測系統(tǒng),用以減少運(yùn)營成本、提高檢修效率、保證運(yùn)營安全,是當(dāng)前發(fā)展的必然趨勢,該新型系統(tǒng)的研制可徹底改變傳統(tǒng)運(yùn)維作業(yè)模式,降低對行車調(diào)度和運(yùn)輸造成的損失,大幅提高檢修安全和效率。
1 系統(tǒng)介紹
1.1 系統(tǒng)概述
隨著軌道交通車輛智能化水平的發(fā)展,實(shí)時(shí)、動態(tài)、高精度、高效的在線檢測系統(tǒng)有助于及時(shí)發(fā)現(xiàn)故障,提高效率,降低人工成本,為軌道交通安全維護(hù)提供依據(jù),提高運(yùn)行安全性。受電弓接觸線檢測模塊內(nèi)部配備高清工業(yè)攝像機(jī)、強(qiáng)光白光、紫外傳感器、激光、紅外熱成像儀、3D攝像機(jī)等,內(nèi)置幾何參數(shù)檢測模塊、紫外燃弧檢測模塊、紅外測溫模塊、接觸網(wǎng)接觸線磨損檢測模塊和關(guān)鍵懸掛檢測模塊。地面分析服務(wù)器可對檢測數(shù)據(jù)進(jìn)行分析及統(tǒng)計(jì),及時(shí)指導(dǎo)列車受電弓和供電接觸網(wǎng)設(shè)備的維修保養(yǎng),極大提高運(yùn)維效率。
1.2 主要功能
(1)受電弓結(jié)構(gòu)檢測功能。通過實(shí)時(shí)采集受電弓的高清視頻,利用模式識別、機(jī)器學(xué)習(xí)等智能圖像識別技術(shù)實(shí)現(xiàn)受電弓結(jié)構(gòu)變形,缺失等故障的自動識別分析和報(bào)警。
(2)弓網(wǎng)燃弧檢測功能。受電弓和接觸網(wǎng)離線會導(dǎo)致在受電弓和接觸網(wǎng)之間產(chǎn)生電弧,引起牽引電流擾動,影響受電弓和接觸網(wǎng)的電流采集質(zhì)量。受電弓接觸線檢測系統(tǒng)采用紫外檢測儀檢測受電弓接觸線離線時(shí)產(chǎn)生的特定波長的紫外,觸發(fā)攝像系統(tǒng),可以準(zhǔn)確測量、分析和記錄整條線路的弓網(wǎng)離線情況,包括離線(燃弧)位置、燃弧強(qiáng)度、燃弧時(shí)間、過程監(jiān)控等,并輸出數(shù)據(jù)和圖像。
同時(shí)利用定位信息,如定位電弧燒點(diǎn)等。
(3)接觸網(wǎng)關(guān)鍵懸掛檢測。受電弓接觸網(wǎng)檢測系統(tǒng)采用高清攝像機(jī)對列車運(yùn)行過程中接觸網(wǎng)的懸掛部分進(jìn)行視頻拍攝。車頂安裝兩套攝像頭,分別分布在接觸線兩側(cè),并配備高亮度補(bǔ)光,可有效記錄柔性接觸線部分接觸懸掛(部分支撐裝置吊桿)和剛性接觸線部分接觸懸掛(剛性接觸線支撐裝置、定位裝置和連接器)等零部件的狀態(tài)。首先利用懸掛檢測模塊對懸掛點(diǎn)進(jìn)行定位,對懸掛點(diǎn)的檢測觸發(fā)攝像頭進(jìn)行高速捕捉,通過網(wǎng)線將采集到的圖像傳輸?shù)杰噧?nèi)工控機(jī),圖像采集軟件將位置信息集成到實(shí)時(shí)圖像中
1.3 系統(tǒng)組成
系統(tǒng)主要由車頂數(shù)據(jù)采集設(shè)備、弓網(wǎng)硬點(diǎn)檢測設(shè)備、車內(nèi)分析服務(wù)器、精度補(bǔ)償設(shè)備以及地面數(shù)據(jù)中心組成,如圖1所示。
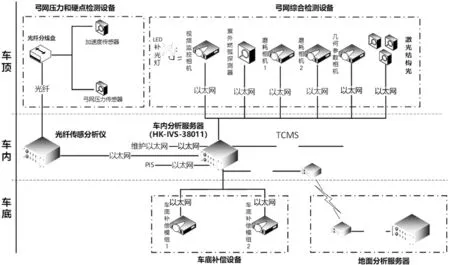
圖1 弓網(wǎng)檢測系統(tǒng)拓?fù)鋱D
受電弓接觸網(wǎng)檢測系統(tǒng)采用高清攝像機(jī)對列車運(yùn)行過程中接觸網(wǎng)的懸掛部分進(jìn)行視頻拍攝。車頂安裝兩套攝像頭,分別分布在接觸線兩側(cè),并配備高亮度補(bǔ)光,可有效記錄柔性接觸線部分接觸懸掛(部分支撐裝置吊桿)和剛性接觸線部分接觸懸掛(剛性接觸線支撐裝置、定位裝置和連接器)等零部件的狀態(tài)。首先利用懸掛檢測模塊對懸掛點(diǎn)進(jìn)行定位,對懸掛點(diǎn)的檢測觸發(fā)攝像頭進(jìn)行高速捕捉,通過網(wǎng)線將采集到的圖像傳輸?shù)杰噧?nèi)工控機(jī),圖像采集軟件將位置信息集成到實(shí)時(shí)圖像中。
車內(nèi)分析服務(wù)器主要進(jìn)行圖像采集控制、數(shù)據(jù)傳輸以及和車輛接口進(jìn)行通信。
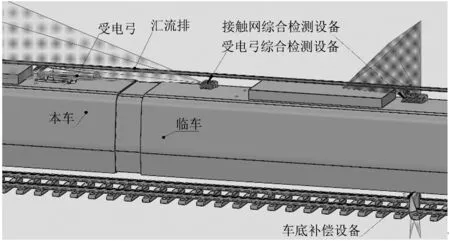
圖2 系統(tǒng)安裝分布示意圖
2 技術(shù)創(chuàng)新點(diǎn)
2.1 受電弓結(jié)構(gòu)檢測
基于圖像處理的受電弓結(jié)構(gòu)異常檢測算法,包括以下步驟:
圖像預(yù)處理步驟,去除待識別圖像中的噪聲。
采用HOG+SVM的方法對經(jīng)過圖像預(yù)處理步驟后的待識別圖像中包含的受電弓影像進(jìn)行定位,受電弓結(jié)構(gòu)故障一般需要在車輛歸庫后,接觸線斷電,運(yùn)維人員登車頂進(jìn)行排查檢測,一方面存在意外觸電、高空跌落等安全隱患,另一方面車輛歸庫后發(fā)現(xiàn)故障多為事故發(fā)生后,故障排查和判定非常依賴于運(yùn)維人員的個人經(jīng)驗(yàn)不確定性大,檢測效率和質(zhì)量相對有限,因此,通過技術(shù)升級來解決傳統(tǒng)故障檢測技術(shù)的缺陷是當(dāng)務(wù)之急。受電弓輪廓提取步驟對經(jīng)過受電弓定位步驟的待識別圖像進(jìn)行圖像增強(qiáng),然后進(jìn)行固定閾值化處理,通過二值化處理對圖像像素進(jìn)行分割,遍歷所有像素后,以像素值為提取標(biāo)準(zhǔn)提取前景像素;關(guān)鍵輪廓提取步驟,對經(jīng)過所述受電弓輪廓提取步驟處理的待識別圖像提取出受電弓左、右兩側(cè)的區(qū)域,分割提取出的區(qū)域中心線輪廓,遍歷每個輪廓的縱坐標(biāo)極大值,再將坐標(biāo)極值進(jìn)行從大到小的排序,末位對應(yīng)的就是關(guān)鍵輪廓線。
關(guān)鍵點(diǎn)提取步驟,提取關(guān)鍵輪廓線中受電弓滑板與羊角的間隙中心線輪廓和羊角邊沿中心線輪廓,從而獲取關(guān)鍵點(diǎn)。
參數(shù)計(jì)算與異常判斷步驟,包括通過關(guān)鍵點(diǎn)提取步驟的結(jié)果對受電弓滑板長度、受電弓弓頭長度和受電弓弓頭高度進(jìn)行計(jì)算,將計(jì)算得到的滑板長度、弓頭長度、弓頭高度和標(biāo)準(zhǔn)值進(jìn)行比較并判定受電弓結(jié)構(gòu)有無異常現(xiàn)象。
通過HOG特征提取的方法對樣本圖像進(jìn)行特征提取,具體包括以下步驟:
由于拍攝環(huán)境差異為減少光照因素和局部陰影對受電弓圖像的影響,需要對圖像進(jìn)行歸一化處理I(x,y)=I(x,y)gamma,其中(x,y)為圖像的像素點(diǎn);對圖像x方向和y方向進(jìn)行梯度計(jì)算,梯度計(jì)算是為進(jìn)一步弱化光照的影響,圖像中的像素點(diǎn)(x,y)的梯度為:
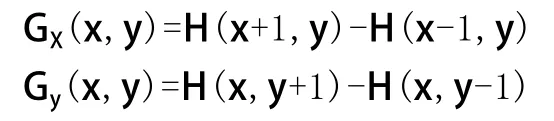
根據(jù)以上式子,可得到像素點(diǎn)(x,y)處的梯度幅值:

和梯度方向:

通過SVM訓(xùn)練方法對樣本圖像中的受電弓圖像和非受電弓圖像進(jìn)行HOG特征分類,包括對線性可分的樣本圖像HOG特征點(diǎn)以最優(yōu)分類線進(jìn)行分類,以及對非線性可分的樣本圖像HOG特征點(diǎn)以最優(yōu)分類超平面進(jìn)行分類。通過最優(yōu)分類線,面函數(shù)可對受電弓整正、負(fù)樣本圖像進(jìn)行訓(xùn)練學(xué)習(xí),最終得到一個受電弓檢測模型。圖3、4為該模型在實(shí)際運(yùn)營場景中的運(yùn)用。

圖3 受電弓結(jié)構(gòu)實(shí)時(shí)監(jiān)測示意圖

圖4 受電弓結(jié)構(gòu)異常報(bào)警
2.2 弓網(wǎng)燃弧檢測
弓網(wǎng)燃弧檢測抓藥采用紫外探測器對弓網(wǎng)燃弧所造成的光輻射(220~329nm)進(jìn)行實(shí)時(shí)監(jiān)測,能實(shí)時(shí)監(jiān)測燃弧的強(qiáng)度、持續(xù)時(shí)長等參數(shù)。
紫外探測器主要利用金屬的光電發(fā)射效應(yīng)結(jié)合電子繁流理論。將傳感器的陽極和光電陰極加載電壓形成電場。在其作用下電子被加速撞向陰極,產(chǎn)生更多的電子。這一過程循環(huán)往復(fù),在陽極和光電陰極之間就會迅速形成很大的電流并產(chǎn)生放電。原理如圖5。
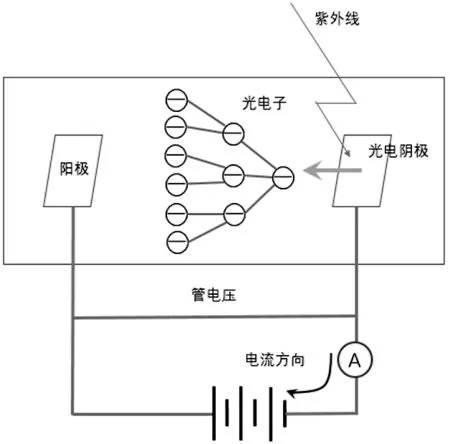
圖5 紫外探測器原理示意圖
紫外探測器由光敏元件和信號處理模塊組成。當(dāng)光敏元件接收到燃弧發(fā)生所釋放得大量紫外光輻射時(shí),會轉(zhuǎn)換為電脈沖信號,通過信號處理模塊處理得到燃弧輻射強(qiáng)度,再根據(jù)數(shù)據(jù)采樣情況計(jì)算燃弧持續(xù)時(shí)長,紫外探測器采用一體式設(shè)計(jì),自帶窄帶濾光片,可以在全日盲條件下精確探測,外觀如圖6。
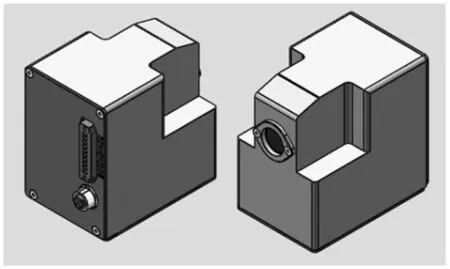
圖6 紫外探測器示意圖
通過對燃弧持續(xù)時(shí)間的檢測,結(jié)合牽引電流檢測實(shí)現(xiàn)燃弧率的計(jì)算,根據(jù)標(biāo)準(zhǔn)EN-50317-2002中關(guān)于燃弧率的定義,燃弧率的計(jì)算公式為:
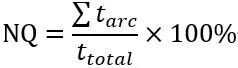
其中,tarc是持續(xù)時(shí)間超過1毫秒的拉弧時(shí)間。
ttotal是一段測量時(shí)間內(nèi)電流超過額定電流30%的時(shí)間總和。
結(jié)果以百分比表示并作為在一定速度下的列車弓網(wǎng)受流質(zhì)量的一個特性指標(biāo)。圖7、圖8為弓網(wǎng)燃弧檢測在實(shí)際運(yùn)營中的幾個案例。
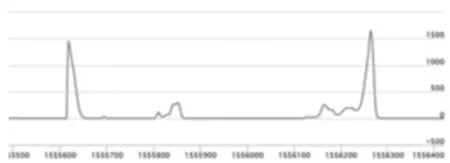
圖7 紫外探測器探測到燃弧時(shí)的強(qiáng)度曲線示意圖

圖8 運(yùn)行狀況燃弧發(fā)生時(shí)的圖片
2.3 接觸線磨耗檢測
接觸網(wǎng)導(dǎo)線呈圓柱狀,截面底部為標(biāo)準(zhǔn)圓弧,列車運(yùn)營過程中接觸網(wǎng)導(dǎo)線長時(shí)間與受電弓滑板接觸摩擦取電導(dǎo)致導(dǎo)線底面磨損,即導(dǎo)線截面底部被被一條橫線(磨損表面)截?cái)啵鶕?jù)圓弧和直線的幾何關(guān)系,可計(jì)算磨耗深度。
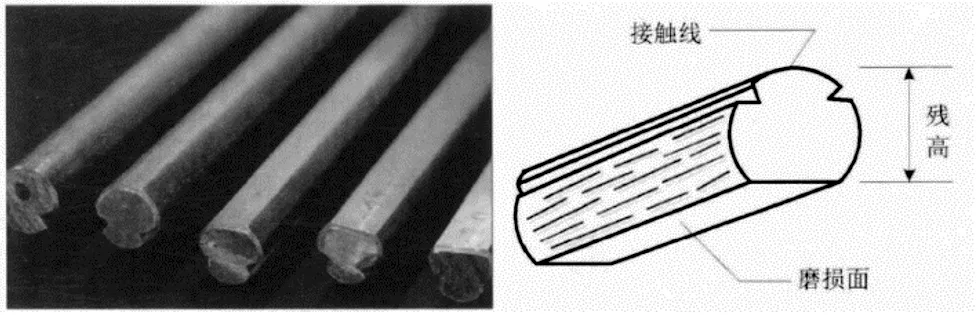
圖9 接觸線截面示意圖
列車取電方式為弓網(wǎng)摩擦取電,磨損面通常不易氧化,會有較強(qiáng)的反光,在磨損面邊界處反光亮度梯度下降非常明顯,可用來作為判斷邊界的依據(jù),磨損接觸線如圖10所示,A、B兩點(diǎn)光照梯度有明顯變化,而兩點(diǎn)間光照梯度沒有變化。識別圖像特征提取A、B兩點(diǎn),再利用幾何關(guān)系求解出磨耗大小w,進(jìn)而計(jì)算出磨損深度a。
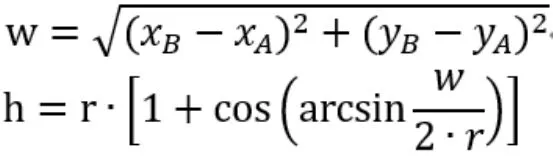
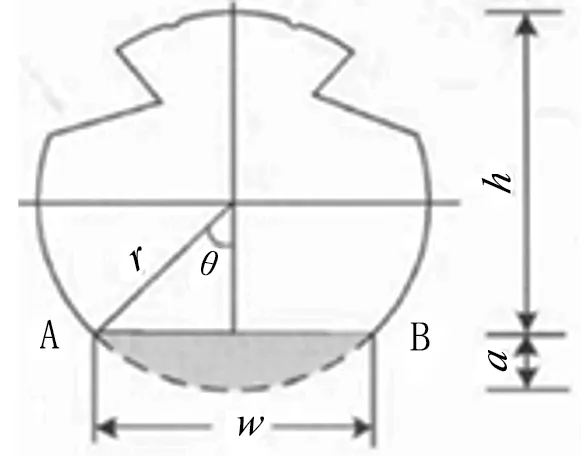
圖10 接觸線截面尺寸示意圖
綜上所述,接觸線磨耗的測量過程有如下幾步:
(1)利用圖像邊緣檢測識別算法從左邊相機(jī)拍攝的圖片定位到接觸線磨損面和非磨損位置的角點(diǎn)。代入相機(jī)標(biāo)定的內(nèi)參和外參矩陣可求得左邊角點(diǎn)到相機(jī)的距離。
(2)同理獲取到接觸線右側(cè)角點(diǎn)到右側(cè)相機(jī)的距離
(3)兩個相機(jī)安裝距離已知,接觸線左右角點(diǎn)分別與左右兩側(cè)相機(jī)的距離已知,由幾何參數(shù)測量結(jié)果可知接觸線與相機(jī)的連線和水平位置的夾角。
(4)由以上已知條件可計(jì)算出左右兩側(cè)角點(diǎn)相對于XYO坐標(biāo)系的坐標(biāo)位置,可以判斷接觸線是否存在偏磨現(xiàn)象。
(5)代入接觸線的直徑可求得接觸線磨耗。
2.4 硬點(diǎn)檢測
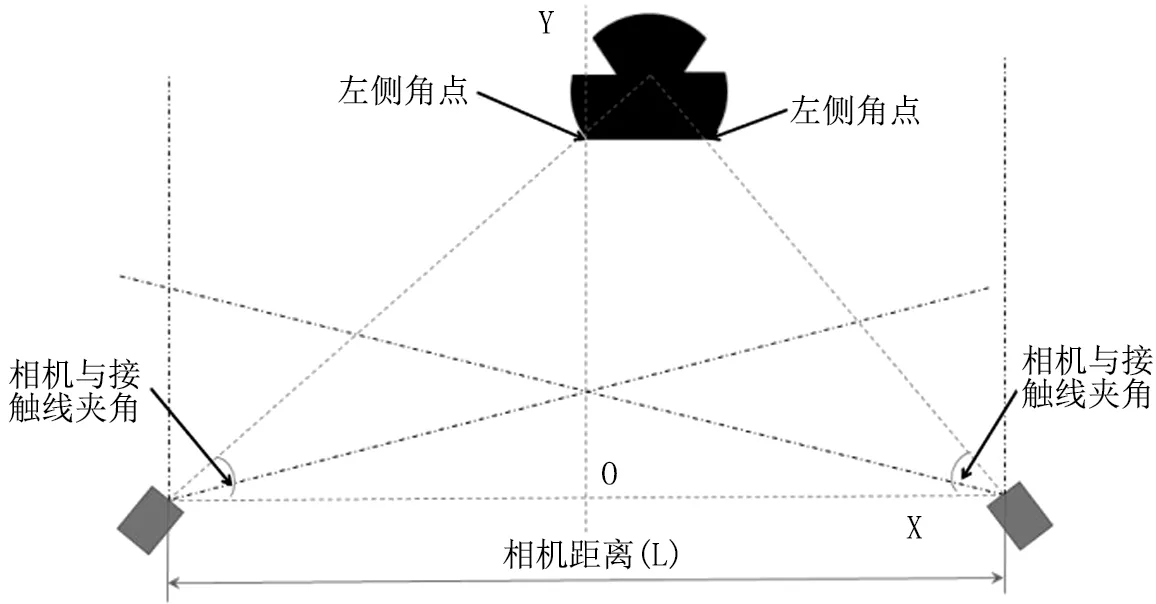
圖11 接觸線磨耗檢測示意圖
圖12 接觸線三維形貌復(fù)原示意圖
接觸線硬點(diǎn)采用非接觸式,通過硬點(diǎn)檢測相機(jī)以恒定1000fps幀率進(jìn)行拍攝,每一幀間隔的時(shí)間都相同,對每一幀進(jìn)行受電弓弓頭的定位,對比前后兩幀之間弓頭的高度差,由高度差和時(shí)間的二次積分可以推算出受電弓在縱向位置的加速度。當(dāng)加速度超過額定的數(shù)值時(shí),則定義為該位置存在硬點(diǎn)。
根據(jù)實(shí)測車輛平順運(yùn)行無硬點(diǎn)時(shí),垂向加速度不大于0.3g(g為重力加速度),而出現(xiàn)硬點(diǎn)時(shí)振幅會超過250mm,垂向加速度會超過4g。
3 結(jié)語
新型弓網(wǎng)在線監(jiān)測系統(tǒng)通過新增的弓網(wǎng)結(jié)構(gòu)檢測、燃弧檢測、接觸線磨耗檢測以及弓網(wǎng)壓力和硬點(diǎn)檢測等多維度檢測,能夠全面覆蓋檢測弓網(wǎng)運(yùn)行異常狀態(tài),極大提高了城市軌道交通運(yùn)營安全監(jiān)測和管理維護(hù)效率。通過長期數(shù)據(jù)收集并基于大數(shù)據(jù)分析,可逐步實(shí)現(xiàn)對軌道交通列車受電弓和接觸網(wǎng)的狀態(tài)智能診斷,為智慧交通建設(shè)開辟新思路。
猜你喜歡
《學(xué)習(xí)方法報(bào)》歷史中考版(2023年21期)2023-11-09 07:40:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
數(shù)學(xué)小靈通(1-2年級)(2020年9期)2020-10-27 03:24:18
當(dāng)代貴州(2019年41期)2019-12-13 09:28:56
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
中國共青團(tuán)(2015年7期)2015-12-17 01:24:38