一種基于農業機械視覺技術的風機零件識別方法*
2022-07-20 08:14:20段文麗
南方農機 2022年14期
關鍵詞:方法
向 亮 , 段文麗 , 李 皓
(1.武昌工學院智能制造學院,湖北 武漢 430065;2.綠色風機制造湖北省協同創新中心,湖北 武漢 430065)
1 研究背景
隨著社會的飛速發展和人工成本的不斷提高,各種各樣的農業機械設備越來越多,如提供動力的拖拉機,如圖1所示。拖拉機一般利用柴油發動機提供動力,常采用空空中冷系統散熱。空空中冷系統如圖2所示,其中必不可少的組成部件有風扇、導風罩、散熱器組[1-3]。由于發動機的功率不同,其選用的風扇大小也不同,風扇如圖3所示,因此組成風扇的扇葉也就有大小不同的規格。在為風扇裝配扇葉時,如何實現快速識別,以避免裝配不正確的扇葉,就顯得非常重要。因此,課題組提出了一種基于視覺技術的快速識別風機零件的方法。

圖1 拖拉機
圖2 空空中冷系統

圖3 風扇
2 風扇零件識別定位原理
2.1 零件圖像采集原理
機械零件圖像采集實質上是把檢測對象外形結構以及內部特征轉變成計算機能夠識別的數據信息[4-6]。風扇零件識別定位流程如圖4所示。光源提供光照,相機獲取被檢測物的圖像信息;圖像采集卡是機器視覺系統的重要組成部分,其主要功能是實時采集相機輸出的圖像信息,將采集的圖像轉化為數字信號,傳輸給圖像處理器;圖像處理器對輸入的數字信號進行運算處理,最終輸出結果。
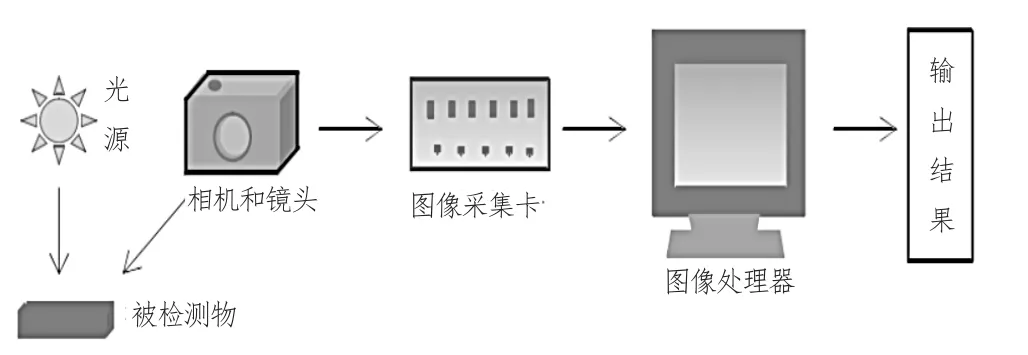
圖4 零件圖像采集的流程圖
2.2 相機選取
相機是視覺系統的主要部件,即光學部分鏡頭和視覺傳感器。光學元件鏡頭有兩種,即定焦距鏡頭和變焦距鏡頭[6-8]。定焦距鏡頭適用于目標物位置固定不變的情況,這時相機采用固定安裝法。定焦距鏡頭的優點是成像質量好,重量輕,體積小,價格便宜等;不足之處是可調整性差,不能改變視野范圍。變焦距鏡頭適用于要求視野范圍可變的攝像系統。適用于工業機器人領域的視覺傳感器一般有光導攝像管和固體攝像器件。由于是針對風扇扇葉的識別,故選擇基于USB接口的彩色CMOS圖像傳感器的工業相機,像素為300萬、焦距為8 mm的工業相機鏡頭,分別如圖5和圖6所示。

圖5 工業相機

圖6 工業相機鏡頭
2.3 圖像校正
光線穿過透鏡再到達相機圖像傳感器,才能最終形成物體圖像。鏡片的加工水平以及相機安裝時的精度誤差等,均會影響實驗和工程效果。此時,需要對相機進行系統標定,得到相機的內外參數。常用的相機標定方法有直接線性變換法、Tsai兩步法、張正友標定法[6-9]。張正友的平面標定方法是介于傳統標定方法和自標定方法之間的一種方法。它既避免了傳統方法對設備要求高、操作煩瑣的缺點,又比自標定方法的精度高。因此,本文采用張正友標定法進行圖像的校正。
在獲取圖像時,由于相機本身的振動以及車間里振動、噪聲等的干擾,導致圖像的質量變差。這就要求在圖像處理過程中運用非線性濾波器進行去噪處理。這里采用中值濾波法,中值濾波法是一種基于排序統計理論的非線性光滑方法,對圖像中每個像素點模板范圍內的各個像素的灰度值進行排序,然后取灰度值位于中間的值來代替該像素的灰度值[6-10]。中值濾波法不僅可以去除孤點噪聲,而且可以保持圖像的邊緣特性,不會使圖像產生比較明顯的模糊情況,處理效果比較好。
在圖像處理過程中,圖像中局部灰度值變化較大區域的像素集合被稱為邊緣。邊緣檢測是提取出目標的邊緣,使得其他部分消除。為了消除目標背景的干擾,進行邊緣檢測是必不可少的。
3 風扇零件識別流程分析
以四種大小不同的風扇扇葉為例,進行風扇零件的識別。在開始識別前,系統中已經存儲了四種風扇扇葉的圖片模型。風扇零件識別流程分析如圖7所示。開始分析時,傳送帶上放置四種大小不同的扇葉若干個,經過相機時,相機開始實時拍照采集圖像;然后提取單幀圖像,對該圖像進行預處理,進行相應的圖像校正。最后,將處理后的圖像與系統中定義的四種不同大小的扇葉特征進行比對,如果與A扇葉相同,那就判定為A扇葉,用機器人抓取A扇葉到裝配A風扇的裝配線皮帶上;同理,如果與B扇葉相同,那就判定為B扇葉,用機器人抓取B扇葉到裝配B風扇的裝配線皮帶上。
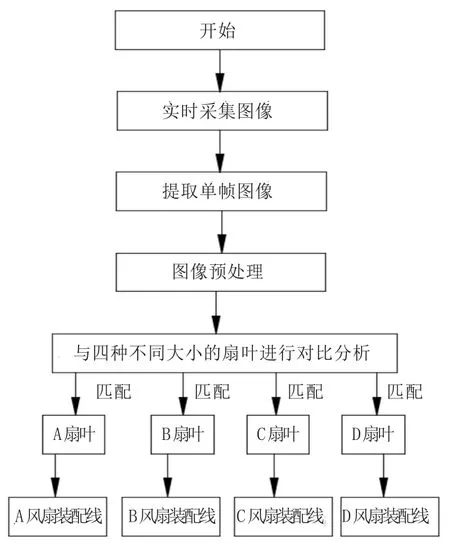
圖7 風扇零件識別流程圖
4 結語
在裝配風機中的風扇扇葉時,由于生產線上有大小不同的扇葉,所以需要快速識別區分。課題組介紹了一種基于視覺技術的快速識別風機零件的方法。通過相機拍照,提取單幀圖像,對圖像進行預處理和校正,將處理后的圖像與已經存儲風扇扇葉圖片進行對比,從而快速識別該扇葉,并通過機器人將其抓取到相應的裝配線上,從而提高裝配線的裝配效率和準確性,降低生產成本。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
