視頻數字化脈沖多普勒引信作用距離公式及性能分析
2022-07-22 05:38:04陳澤宇王雄志徐元超劉躍龍
制導與引信 2022年2期
關鍵詞:信號
陳澤宇,王雄志,徐元超,沈 莉,涂 建,劉躍龍
(1.海裝上海局駐上海地區第六軍事代表室,上海 201109;2.上海無線電設備研究所,上海 201109;3.上海目標識別與環境感知工程技術研究中心,上海 201109;4.上海機電工程研究所,上海 201109)
0 引言
脈沖多普勒(pulsed Doppler,PD)引信是最常用最成熟的一種引信體制。PD 引信在實現方式上經歷了從較低頻段到較高頻段,從模擬電路到模擬電路加低頻數字信號處理、再到視頻數字化處理的發展歷程。文獻[1]中引信的濾波、放大、檢波和電平比較等采用的是模擬電路。文獻[2]中引信的處理電路采用是模擬電路加低頻數字信號處理電路的實現方式。文獻[3-5]中引信的視頻信號采用的是全數字化處理。但迄今為止,視頻數字化PD 引信的理論分析尚不夠完備,也未見到其較準確的作用距離計算公式。本文給出了視頻數字化PD 引信的原理框圖和作用距離公式,與傳統PD 引信原理框圖和作用距離公式進行了比較,并對兩種作用距離公式的不同之處進行了仿真分析,此外還對視頻數字化PD 引信和傳統PD 引信作用距離等性能進行了對比分析。
1 傳統PD 引信原理與作用距離公式
傳統PD 引信是指非視頻數字化處理的PD引信。本章敘述了傳統PD 引信的工作原理,對引信作用距離的參數進行了分析。
1.1 傳統PD引信原理
傳統典型的脈沖多普勒引信有天線收發共用和天線收發分開兩種基本形式,使用最多的是天線收發分開形式。天線收發分開PD 引信原理框圖和PD 引信各級波形如圖1和圖2所示。
由圖1和圖2可知,振蕩源產生高穩定度低相噪的微波正弦信號,除耦合一部分作為接收機混頻器本振外,經過發射開關形成射頻發射脈沖信號,經脈沖功放放大后通過功分器由發射天線發射。被目標反射回來的回波脈沖信號攜帶了多普勒信息,被接收天線接收后至微波接收機(包括接收開關、低噪聲放大、混頻器和視放),最后輸出帶多普勒包絡的雙向視頻脈沖信號。經視頻開關、帶通濾波后形成多普勒信號,再經放大和信號處理電路處理后,形成引信啟動信號。
圖1 傳統PD 引信原理框圖
圖2 傳統PD 引信各級波形圖
1.2 作用距離分析
傳統PD 引信作用距離公式為

式中:為引信作用距離;為發射功率;為發射天線增益;為接收天線增益;為工作波長;為目標雷達截面積;為發射脈沖在作用距離內落入接收波門的寬度;為玻耳茲曼常數;為絕對溫度;為接收機等效帶寬;為接收機噪聲系數;/為輸出信噪比;為發射脈沖重復周期;為接收波門寬度;為系統損耗。
傳統PD 引信接收到的回波信號在視頻開關后是帶多普勒包絡的視頻脈沖(見圖2(h)),經過低頻帶通濾波,多普勒包絡的幅度減小(見圖2(g)),信號損失系數為/。噪聲通過視頻開關后,噪聲損失系數為/。相對于相同發射功率、相同天線增益的連續波引信,傳統PD引信的信噪比損失系數為

假定作用距離為15 m,為獲得較高的信噪比,可取=100 ns,=1 000 ns,=100 ns,則信噪比損失系數0.1,即1/10。也就是,要獲得相同的作用距離,PD 引信的脈沖功率是連續波引信連續功率的10倍。同樣假定作用距離為15 m,要獲得20 m 以下較小的截止距離,可取=30 ns,=1 000 ns,=100 ns,則信噪比損失系數910,即1/≈111。也就是,要獲得相同的作用距離,PD 引信的脈沖功率約為連續波引信連續功率的111倍。
2 視頻數字化PD 引信作用距離公式與性能分析
傳統PD 引信將回波脈沖信號進行低頻多普勒濾波后再進行信號處理,而視頻數字化PD 引信直接進行視頻脈沖采樣,避免了回波信號功率的損失,但因處理帶寬增大也增加了噪聲。本章給出了視頻數字化PD 引信作用距離公式,并對視頻數字化PD 引信的性能進行了分析。
2.1 視頻數字化PD引信作用距離公式
視頻數字化PD 引信典型原理框圖如圖3所示。
圖3 視頻數字化PD 引信原理框圖
由圖3可知,視頻數字化PD 引信的原理框圖與圖2所示的傳統PD 引信原理框圖結構形式相似,但視頻開關之后的信號處理有所不同。傳統PD 引信在視頻開關之后先進行低頻帶通濾波放大,再進行低頻采樣和數字信號處理;而視頻數字化PD 引信在視頻開關之后先進行視頻帶通濾波放大,再進行視頻采樣和數字信號處理。
本節對視頻數字化PD 引信中的實現方式進行介紹,分析視頻數字化對引信作用距離的影響。
設引信作用距離為15 m,發射脈沖和回波脈沖寬度為30 ns,回波信號周期及發射、接收波門周期為1μs,視頻接收波門寬度范圍為(0~100)ns,視頻帶通濾波器通帶范圍為5 k Hz~100 MHz。若視頻采樣率為100 MHz,則每個視頻回波信號周期內可采100點。對于落在視頻接收波門內的回波,最多可采11點,即每個視頻回波信號周期內最多有11個有效數據落在視頻接收波門內。由于回波脈沖寬度為30 ns,故對于落在接收波門內的回波脈沖,至少總能采到1點且不損失脈沖幅度。將每個接收波門周期的相同位置的采樣數據編成1組,最多共可獲得11組有效數據。這11組可能的有效數據中,至少有1組數據是對落在視頻接收波門內的目標回波進行采樣獲得的。這樣的1組數據每1μs只有1點,等效于用低頻采樣率1 MHz進行采樣,避免了傳統PD 引信低頻濾波造成的視頻脈沖包絡幅度損失。
而5 k Hz~100 MHz的噪聲經過視頻開關和5 k Hz~100 MHz視頻帶通濾波后,時域幅度基本不損失。但由于噪聲經100 MHz視頻采樣并進行數據抽取后,再進行快速傅里葉變換(FFT)分析時會產生噪聲折疊,低頻等效噪聲理論上會增大100倍。最終視頻采樣相對于低頻采樣的信噪比增量為(/)/(/)/100≈1.11倍,信噪比增量很小。因此視頻數字化PD 引信作用距離公式為

式中:為噪聲折疊因子,取值為視頻帶通濾波器的高端頻率與脈沖重復頻率的比值。
與式(1)相比,視頻數字化PD 引信作用距離公式與傳統PD 引信作用距離公式有兩處不同。第一處是式(3)中無距離損失因子,是/與/的乘積,/比較直觀,而/是噪聲經過視頻波門后產生的功率損失,需進行仿真驗證。第二處是式(3)增加了噪聲折疊因子,也需要進行仿真驗證。
2.2 視頻數字化PD引信性能分析
理論上視頻數字化PD 引信與傳統PD 引信可以實現相同的性能,只是實現的方式和付出的代價不同。
如果需要有較高的測距精度,傳統PD 引信需要有小的發射脈寬,接收波門需分多檔,低頻接收電路也要分多路進行處理,即采用多路“視頻開關+濾波放大電路”的電路形式。而視頻數字化PD 引信只需要將高速采集數據進行數字分選和分多路數字處理即可,可以實現硬件的小型化。在這種情況下,視頻數字化雖然不能明顯提高信噪比,但使引信具有了分檔測距的功能。如當發射脈寬較窄且視頻采樣率為100 MHz時,可以獲得1.5 m 的測距精度。這使得引信可以根據不同的距離采用不同的引戰延時,從而提高引戰配合效率。
傳統PD 引信如果要獲得分檔測距能力,需要設置多路信號處理電路,體積、質量和成本將大幅增加。當然視頻數字化的代價是采樣率的大幅提高(由1 MHz變為100 MHz)和多路數字信號處理能力。
如果不要求PD 引信有較高的測距精度,只追求高的信噪比或大的作用距離,傳統PD 引信一般采用較寬的發射脈沖以提高信噪比,視頻數字化PD 引信也會采用較寬的發射脈沖,并采用接收波門采樣信號累加的方法提高信噪比。可見,視頻數字化PD 引信與傳統PD 引信相比,信噪比沒有改善,只是實現方式不同。
3 仿真驗證
在第2章的論述中,視頻數字化PD 引信作用距離公式(式(3))與傳統PD 引信作用距離公式(式(1))有兩處不同:第一處是式(3)中去掉了距離損失因子,第二處是式(3)增加了噪聲折疊因子,二者均需要進行仿真驗證。
3.1 噪聲經過視頻波門后產生的功率損失仿真
在傳統PD 引信中,噪聲經過視頻波門后會產生功率損失,噪聲經過視頻波門前后引起功率損失的仿真頻譜如圖4所示。其仿真步驟為:
a)產生(0~300)MHz白噪聲,通過(0~400)k Hz低通濾波器進行濾波,然后用1 MHz采樣率采樣并進行FFT 頻譜分析,得到的噪聲頻譜如圖4(a)所示;
b)產生相同的(0~300)MHz白噪聲,先通過一個脈沖寬度100 ns、周期1 000 ns的視頻開關,再通過(0~400)k Hz低通濾波器進行濾波,然后用1 MHz采樣率采樣并進行FFT 頻譜分析,得到的噪聲頻譜如圖4(b)所示。
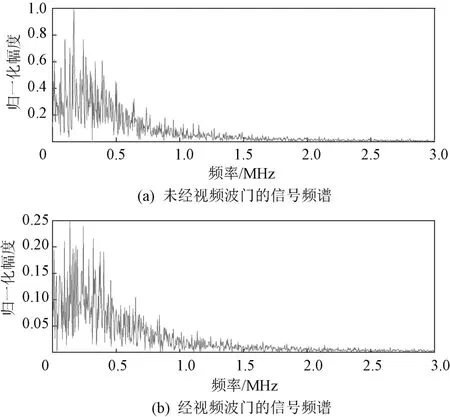
圖4 傳統PD 引信噪聲經過視頻波門前后引起功率損失仿真圖
比較圖4(a)和圖4(b)可知,圖4(a)中噪聲信號頻譜幅度約為圖4(b)中噪聲信號頻譜幅度的3.1倍,功率差約為10 dB,證明傳統PD 引信中白噪聲通過視頻開關后功率損失10 d B。
在視頻數字化PD 引信中,噪聲經過視頻波門、視頻濾波后再視頻采樣,并不會產生功率損失。視頻數字化PD 引信視頻波門前后噪聲信號時域波形如圖5所示。其仿真步驟為:
a)產生(0~300)MHz的白噪聲,通過(0~100)MHz低通濾波器濾波后,得到的噪聲時域波形如圖5(a)所示;
b)產生相同的(0~300)MHz白噪聲,先通過一個脈寬100 ns、周期1 000 ns的開關,再通過(0~100)MHz低通濾波器濾波后,得到的噪聲時域波形如圖5(b)所示。
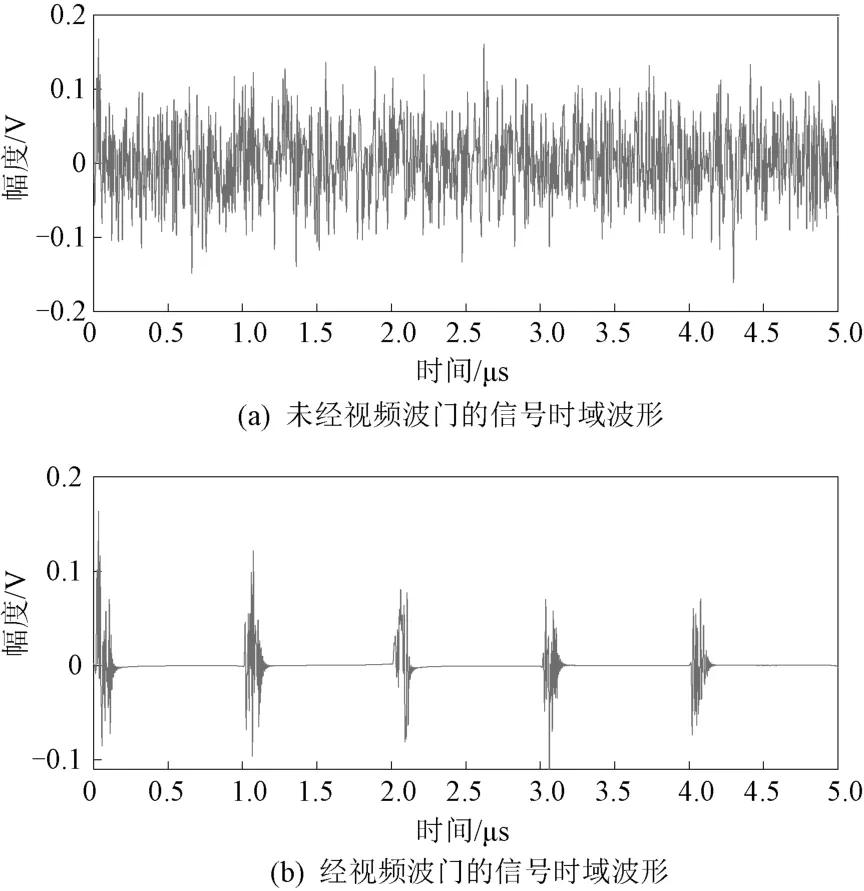
圖5 視頻數字化PD 引信視頻波門前后噪聲信號時域仿真圖
經比較可知,圖5(a)和圖5(b)中兩個噪聲信號時域波形幅度基本相等,說明經視頻開關后,待采樣的噪聲信號功率未受損失。
3.2 視頻數字化引信噪聲折疊的仿真
視頻信號經視頻采樣后數據量非常大,一般采用抽取的方法減小數據量,但這樣會產生噪聲折疊。噪聲信號經抽取后導致折疊的頻譜仿真如圖6所示。其仿真步驟為:
a)(0~100)MHz白噪聲用100 MHz的采樣率采樣(共25 600點)后,每100點抽取1點,共抽取256 點,進行FFT 分析得到的噪聲頻譜如圖6(a)所示;
b)對相同的(0~100)MHz白噪聲先進行(0~400)k Hz濾波,再用1 MHz的采樣率采樣(共256點)并進行FFT 分析,得到的噪聲頻譜如圖6(b)所示。
經比較可知,圖6(a)中噪聲信號頻譜幅度約為圖6(b)中噪聲信號頻譜幅度的10倍。證明視頻數字化抽取后噪聲幅度比傳統PD 引信進行低頻濾波、低頻采樣后的噪聲信號幅度大10 倍左右,即頻譜折疊后噪聲信號功率約增大100倍,亦即噪聲折疊因子為100。

圖6 噪聲折疊仿真圖
4 視頻數字化PD 引信的另一種實現方式與作用距離公式
采用視頻數字化技術設計引信時,如果對信噪比或作用距離要求較高而發射功率受限制,可以犧牲測距精度,將接收波門內的所有采樣點的采樣值進行累加。例如,當=100 ns,=1 000 ns,=100 ns 時,可將 接收波門 內 的10個采樣點的采樣值進行累加。當目標回波全部落在接收波門內時,累加后的目標信號幅度是單個采樣點的目標信號幅度的10倍,累加后的目標信號功率是單個采樣點的目標信號功率的100倍;當無目標回波落在接收波門內時,累加后的噪聲功率是單個采樣點的噪聲功率的10 倍。最終,累加后的信噪比為累加前的10倍,即通過犧牲測距精度實現了信噪比的提高。
這種情況下視頻數字化PD 引信作用距離公式為

式中:為有效信號累加的個數。
5 結論
本文通過仿真與分析,給出了視頻數字化PD引信兩種主要的作用距離公式形式,并對視頻數字化PD 引信與傳統PD 引信的信噪比等參數進行了對比。視頻數字化PD 引信相比傳統PD 引信,主要優勢是不需要通過多個距離門和多路低頻處理電路來獲得分檔測距性能,有利于引戰配合。在發射脈沖很窄而作用距離較大的情況下,相對于傳統PD 引信,視頻數字化PD 引信可通過高速視頻采樣、數據抽取和分組獲得較高的測距精度,且不影響作用距離。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06