高效殘膜撿拾回收機的設計與試驗*
2022-07-25 03:00:06王祎才席愛學李曉軍孟學奇馬海軍馬明義
機械研究與應用 2022年3期
楊 正,王祎才,席愛學,李曉軍,孟學奇,馬海軍,馬明義
(1.甘肅畜牧工程職業技術學院,甘肅 武威 733000; 2.甘肅洮河拖拉機制造有限公司,甘肅 定西 734001)
0 引 言
旱地全膜覆蓋[1]技術的應用雖然達到了增產增收的目的,但隨之而來產生了大量的廢膜[2-3]。農田里面每年廢棄的薄膜數量非常之大,如果不將之收集起來,每年會形成非常大的白色污染,而且回收的薄膜又可以重新制成薄膜,這對于節省資源意義非常重大[4]。
在白色污染日益嚴重的當下,農田殘膜的回收一直是亟需解決的難題[5-6],國內外先后研制的滾筒式[7]、鼠籠式[8-9]、釘耙式[10-13]等都未能完美地解決。回收殘膜一直是農業工作者未了的心愿。截止目前,市場上成型的殘膜回收機具仍不能滿足撿拾較高要求。
對旱地地表進行全膜覆蓋,可有效接納降水,增加地溫,減少蒸發,并起到改善作物生長環境,提高水分利用率等效果。農業生產實踐表明,全膜覆蓋技術比不覆膜單產增幅超過30%,增產效果非常顯著,經濟效益良好,因而,在甘肅省得到非常廣泛的推廣。
“成也地膜,敗也地膜”,曾經助推農業增產增收的地膜,如今卻成了重要的土壤污染源。治理白色污染,刻不容緩。傳統殘膜撿拾回收機撿拾效率低、脫模困難。而人工撿拾,效率低,勞動強度大,費時費工。筆者在研制傳統殘膜撿拾機的基礎上,通過校企合作共同研制開發,首次采用了反轉旋齒式撿拾機構[14],模擬人工的作業過程,一次性撿拾率高達90%以上,可一次性完成殘膜的撿拾、輸送、卷膜等作業工序,是非常理想的撿拾機具。
1 整機機構與工作原理
1.1 整機機構
高效殘膜撿拾回收機主要是由挑膜起膜機構、掛膜輸送機構、卷膜卸膜機構等三大機構組成。其中挑膜起膜機構包括挑膜齒、挑膜架、挑膜板、起膜架、起膜定盤、起膜動盤等;掛膜輸送機構包括輸膜傳動鏈、傳動鏈輪、傳動齒桿等;卷膜卸膜機構包括卷膜棍等。其具體結構如圖1所示。

圖1 高效殘膜撿拾回收機組成
高效殘膜撿拾回收機參數如表1所列。

表1 高效殘膜撿拾回收機參數
1.2 工作原理
高效殘膜撿拾回收機采用反轉式起膜挑膜機構,模擬了人工使用釘齒耙勾拉動作,效率更高。人工使用釘齒耙勾拉時動作的方向是相反的,高效殘膜撿拾回收機正好借用了人工的作業過程。具體的撿拾過程為:動力拖拉機帶動機具不斷向前運動,反轉式起膜挑膜進行反轉時挑膜齒插入土壤,挑起埋藏于土壤的農田殘膜,由于挑膜齒的齒尖是尖銳的,能夠將部分殘膜掛起,并帶動或拔起了另一部分殘膜,并裸露于地表,隨著反轉時挑膜機構的不斷挑膜,持續保持了殘膜的撿拾過程。撿拾起的殘膜輸送至輸送帶,輸送帶上裝有小釘齒,能夠確保掛住殘膜,并隨著輸送帶的輸送,將殘膜上的土壤抖落,僅剩余殘膜被輸送至卷膜棍上[15-16],待卷膜棍卷入一定的殘膜時,停機并將纏繞在卷膜棍上的殘膜進行分離去除,由于卷膜棍為錐形,并加裝液壓脫模機構,所以很輕松就可以進行脫離。至此完成一個作業流程,如此往復進行撿拾殘膜作業。
2 旋齒式反轉挑膜機構
殘膜撿拾機具的難點在于挑膜機構。人工利用釘齒耙挑膜時具有很好的撿拾率。反轉挑膜機構就是模擬人工運動動作。利用平行四連桿機構將挑膜齒安裝于齒桿上,并通過鏈輪傳動反轉,充分利用了挑膜機構里的“挑”,通過不斷的挑起,保證了一次撿拾率90%以上,如圖2所示。

圖2 反轉式起膜挑膜機構1.機架 2.軸承座 3.十字安裝架 4.挑膜齒 5.挑膜架 6.挑膜架軸管 7.定盤固定桿 8.動盤 9.定盤 10.連桿
機架、挑膜架軸管兩端設置安裝架,安裝架安裝在機架中部,兩個安裝架之間安裝挑膜架,挑膜架與挑膜架軸管平行,挑膜架軸管上垂直設置若干挑膜齒,一側安裝架上安裝挑膜齒擺線運動裝置,挑膜齒擺線運動裝置使挑膜齒在機具前進時的運動軌跡為擺線運動并保持豎直向下,機架后下方傾斜設置送膜帶。挑膜架和挑膜齒因與動盤、連桿的聯動,在機具前進時挑膜齒的運動軌跡為擺線運動并保持豎直向下,達到挑膜齒完成挑膜、卸膜的運動,將地膜向前輸送至送膜帶,交錯安裝的挑膜齒能夠有效提高殘膜撿拾率。反轉平行四連桿挑膜機構與輸送帶的安裝位置如圖3所示。

圖3 反轉平行四連桿挑膜機構與輸送帶的安裝位置
2.1 運動分析
(1) 釘齒齒尖做余擺線運動,只要在滿足反轉挑膜機構的轉速大于機具前進的速度的情況下,釘齒齒尖的運動軌跡才能形成余擺線的閉環曲線,閉環曲線的寬度E由垂直入土式穴播機沿x方向前進的速度Vm和釘齒齒尖繞著O點圓周運動的切線速度V之比值來確定,即有以下公式:
(1)
根據圖4所示,只有λ值大于1時,余擺線軌跡才能相交,從而形成閉環曲線。滿足挑膜軌跡密集要求,從而保證撿拾效果。

圖4 不同λ值對應的曲線軌跡
釘齒齒尖垂直插入、拔出時:當B點運動至br時為插入行程,br點至bC點為拔出行程。閉環曲線上最大的圓弧brbC點的絕對速度Ur是垂直向下的。而bC點此時的絕對速度卻是向上的。閉環曲線一半的高度應為挑膜深度S=50 mm,閉環曲線上最大的寬度E是B點在釘齒齒尖運動過程中Tr時刻至TC時刻沿著x方向上最大的移動量。
(2) 機具沿著x方向上前進的速度是Vm=500 mm/s,釘齒齒尖的切線速度則是V=Rω,此時釘齒齒尖的余擺線運動軌跡方程式為:
(2)
式中:R為釘齒齒尖鉸接點至起膜架軸之間的距離(長連桿的長度為200 mm)。
(3) 閉環曲線最大寬度brbC的距離計算:
釘齒齒尖軌跡如圖5所示。

圖5 釘齒齒尖軌跡



推導后得:θr=π-arcsinλ
θC=arcsinλ
將θr和θC代入擺線方程式中,即:
xr=R(λ(C-θb)-cosθb)
xC=R(λθb+cosθb)
計算得閉環曲線最大的寬度E:
(4) 對釘齒齒尖插入土壤時進行分析。
如圖6所示,釘齒齒尖插入土壤中,理想狀態下穴形孔位呈現“V”字形,然而由于土壤的擠壓或地膜的滑移等因素,使得成穴器的形狀呈現不規則的穴形。
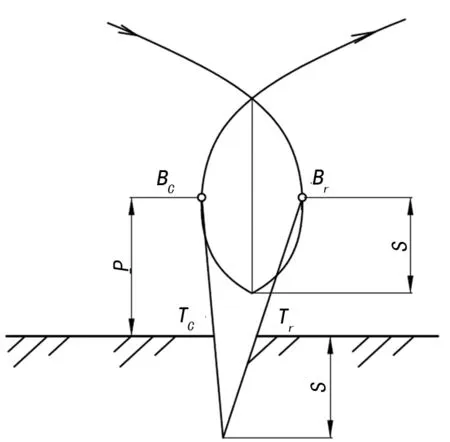
圖6 軌跡穴形圖
由于平行四連桿機構的連桿B、C、D在B點上會做相對的運動滑移,故成穴器穴形最大的寬度TrTC可以列入下列公式中:
(3)
式中:p為連桿長度=60 mm。
綜上所述,采用平行四連桿機構控制的釘齒齒尖插入和拔出動作較好地模擬了實際垂直插入、垂直拔出,從而從設計思路上保證能夠挑膜,達到了較好的撿拾率。
2.2 SolidWorks仿真分析
將建立好的樣機實體模型在SolidWorksmotion中進行仿真分析。機具前進的速度Vm與反轉機構轉動的速度Vx存在以下關聯公式。如圖7所示。
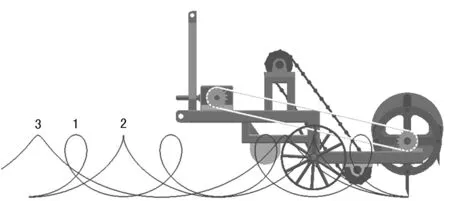
圖7 軌跡穴形圖
當λ=Vm/Vx<1時曲線為“3”號曲線,曲線無交叉,機具前進速度大于反轉挑膜機構轉速,會出現“漏撿”情況。
當λ=Vm/Vx=1時曲線為“2”號曲線,機具前進速度等于反轉挑膜機構,處于臨界狀態;
當λ=Vm/Vx>1時曲線為“1”號曲線,有較大部分交叉,且閉環曲線寬度也較大,機具前進速度小于反轉挑膜機構,能夠更多地挑起埋藏土壤的地膜,增強撿拾效果。
基于以上分析得出:“1”號曲線為接近理想的撿拾曲線。
3 卷膜脫模機構
卷膜脫模是殘膜撿拾機具的又一難點,基于傳統卷膜脫模機構存在脫模困難的問題,設計了加裝了伸縮管的卷膜脫模機構,如圖8所示,在脫模時拉動伸縮管,致使前端收縮形成“前小后大”的錐形,達到輕松脫模的作用。如圖9所示為現場脫模過程演示。

圖8 卷膜脫模機構

圖9 脫模過程
4 試 驗
4.1 試驗條件
高效殘膜撿拾回收機試驗地選在甘肅省定西市臨洮縣五里鋪11號試驗場內。實驗環境溫度23°,天氣晴朗,田間條件如表2所列。

表2 試驗地條件
4.2 試驗結果
根據國家標準《GB/T 25413-2010農田地膜殘留量限值及測定》,并結合實際情況確定試驗指標[17-18],主要測試殘膜回收凈率等指標。試驗結果如表3所示。圖10為作業過程,圖11為成果鑒定證書。

表3 試驗地條件

圖10 作業過程 圖11 推廣鑒定證書
5 結 論
文中重點對高效殘膜撿拾回收機的平行四連桿反轉旋齒式挑膜機構進行了研究分析。經過對機具的試驗,得出如下結論。
(1) 試驗驗證高效殘膜撿拾回收機較好地滿足了農技農藝設計要求,機具各項主要設計參數合理,平行四連桿反轉式挑膜機構的挑膜效果非常顯著。
(2) 機具在田間的適應性較強,能很好地將玉米茬地表層以及耕層土壤中的殘膜一起收集起來,作業時無纏膜現象。且脫模輕松、便捷。
(3) 機具集成的多樣化功能,能夠一次性實現殘膜的撿拾、輸送、卷膜、脫模等作業過程,同時反轉式挑膜機構還能夠疏松土壤,一定程度上改善和優化了土壤結構。
(4) 機具滿足國家標準《GB/T 25413-2010農田地膜殘留量限值及測定》的各項要求,生產率達82 kg/h,一次性撿拾率達到90%以上。