基于瓦斯監測和人員定位智能礦燈設計與實現*
2022-07-25 03:00:26李玉鳳
機械研究與應用 2022年3期
李玉鳳
(山西焦煤西山煤電斜溝礦,山西 呂梁 033602)
0 引 言
礦工隨身佩戴的礦燈單一的照明功能已經不能滿足井下工人日常作業要求,為增強井下作業工人的安全性,需增加瓦斯超限檢測功能,提前預警保護礦工人身安全;需增加人員定位功能,保證事故發生后有效定位并跟蹤井下被困人員,保證救援及時。礦燈多功能化研究成果典型代表有:法國研發的裸鉑絲傳感器可實時監測礦井瓦斯濃度;俄羅斯量產并實際應用的瓦斯超限報警多功能礦燈;中國煤科重慶研究院研發的瓦斯報警礦燈等[1-3]。礦井人員定位以無線射頻掃描、無線傳感器網絡定位兩種方式為主。無線射頻掃描方案需配置唯一ID識別卡、讀卡器,當井下工人佩戴識別卡經過讀卡器區域后,讀卡器自動讀取該ID號并上傳至地面監控中心,缺點為易漏讀識別卡、識別有效范圍小、抗干擾能力弱、數據通信穩定性差。無線傳感器網絡定位方案需布置足夠多的定位系統和礦燈系統并形成自組織網絡,但定位距離較短,無法在井下復雜電磁干擾環境下大范圍應用[4]。筆者設計了一種基于人員定位功能的智能礦燈系統,采用有線+無線傳輸方式實現井下工作人員跟蹤定位,并在緊急情況時可傳送呼救信號,增強井下作業人員安全防護措施。
1 智能礦燈系統結構及設計原理
智能礦燈系統設計原理如圖1所示,由礦燈本體系統、定位系統、數據傳輸系統以及地面監視系統四部分組成。礦燈本體系統以STC15W408AS芯片為核心CPU,經CC1101RF無線發送模塊可將人員位置信息以及該位置的瓦斯濃度值傳送給定位系統[5]。定位系統內部的CC1101RF無線接收模塊接收到數據后經STC15W408AS CPU處理以HL-PLC電力載波通信方案傳送給數據傳輸系統。數據傳輸系統接收到數據后以CAN通信模式轉送至地面監視系統,實現瓦斯濃度、人員實時位置的動態監視。定位系統與數據傳輸系統的通信模式除HL-PLC電力載波通信外,還可以以無線通信模式進行傳輸,以解決有線傳輸系統線路出現故障的應急通信。無線通信模式采用433 MHz無線通信技術,能夠適應井下狹窄空間、障礙物多、干擾性強環境下的穩定通信,滿足智能礦燈數據傳輸量小、自組網覆蓋空間大的特點。定位方案采用基于測量信號強度的定位算法,只需測量信號的衰減度,無需增加額外的硬件設備。數據傳輸系統與地面監視系統間采用CAN總線通信實現數據傳輸,保證人員定位數據、瓦斯濃度數據傳輸的可靠性和穩定性。

圖1 智能礦燈系統設計原理
2 系統硬件設計
智能礦燈系統硬件核心芯片為STC公司的STC15W408AS,該芯片具備低速、空閑、掉電/停機三種工作模式,功耗極低,可保證礦燈照明工作時間不低于8小時的要求。STC15W408AS芯片同時具備運算速度塊、時鐘精度高、工作頻率范圍寬、可遠程喚醒、片內資源豐富的特點,滿足智能礦燈設計要求[6-7]。無線通信模塊選用CC1101RF超低功耗芯片,功耗約為10 mA,工作頻率為433 MHz,傳輸距離為100~500 m。STC15W408AS與CC1101RF芯片的引腳以及連接原理圖如圖2所示。

圖2 智能礦燈主芯片與無線模塊連接原理圖
選用MC112型催化燃燒式瓦斯濃度傳感器,該傳感器檢測到瓦斯氣體后,內部電阻急劇升高[8],電阻值變化與檢測到氣體濃度成正比,輸出信號值隨瓦斯氣體濃度增大而增大。MC112瓦斯濃度傳感器響應時間小于10 s,恢復時間小于30 s,可靠性、穩定性好。瓦斯濃度檢測電路如圖3所示,采用催化燃燒式瓦斯濃度傳感器。
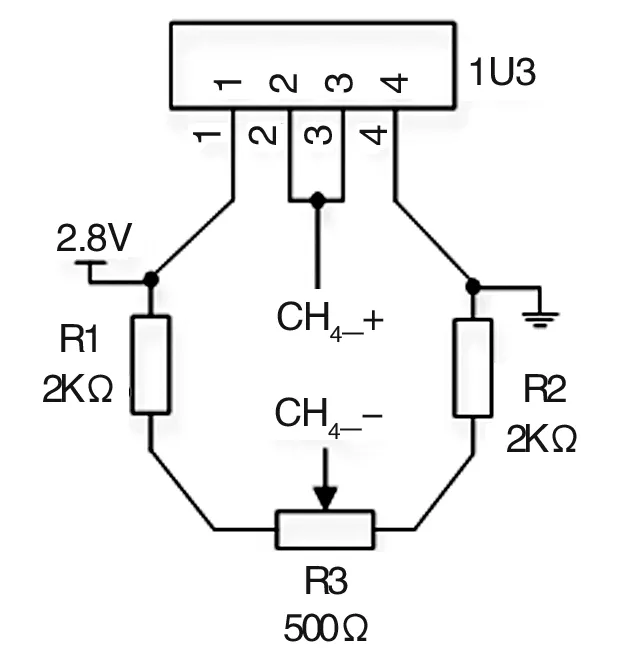
圖3 瓦斯濃度檢測電路
智能礦燈系統硬件還包括模擬信號放大電路、RTC實時時鐘電路、聲光報警電路、電池電壓檢測電路、礦燈控制電路、電源管理電路、CAN總線通信電路等。
3 系統軟件設計
3.1 礦燈系統軟件
智能礦燈系統軟件主要包括瓦斯濃度采集程序、聲光報警程序、礦燈單系統自組網工作模式程序、礦燈多系統自組成工作模式程序,完成瓦斯濃度采集、聲光報警、礦燈單系統/多系統自組網功能。上述程序采用模塊化設計思想,基于Keil軟件平臺,采用C語言完成編寫。
3.2 定位系統軟件
智能礦燈定位系統軟件用于完成無線數據接收以及人員定位功能。智能礦燈人員定位采用RSSI算法實現,以經過大量試驗數據的經驗模型曲線為基準,通過檢測無線信號強度s可確定兩點間的精確距離l。該曲線的橫坐標為兩點間無線信號強度,縱坐標為測量點與監測點間的距離。智能礦燈人員定位原理如圖4所示,由一個礦燈、三個定位系統組成,該三個定位系統記錄自身坐標信息。礦燈發射無線信號至最近的相鄰三個定位系統后,定位系統記錄該無線信號的強度值s1、s2、s3,并測算礦燈距離l1、l2、l3。每個定位系統將自身的s、l以及坐標信號以廣播形式發送給相鄰兩個定位系統[9-10]。每個定位系統接收到兩次臨近定位系統數據后對三個礦燈距離l進行比較排序,由l值最小的定位系統根據空間幾何原理計算礦燈實際坐標值并以HL-PLC電力載波通信模式傳送給數據傳送系統。
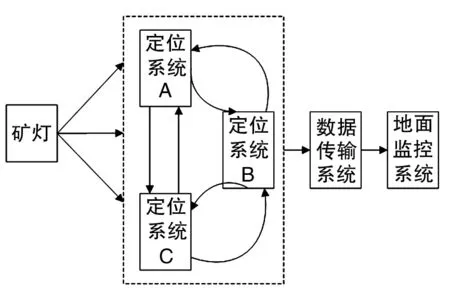
圖4 智能礦燈人員定位原理
為保證數據傳輸的可靠性和穩定性,智能礦燈定位系統與數據傳輸系統、數據傳輸系統與地面監視系統間的通信協議統一采用如表1所列數據傳輸定義格式,包括了幀頭、命令、數據長度、命令等級、礦燈ID、臨近的三個定位系統ID、定位礦燈X/Y坐標、礦燈被測點瓦斯濃度值、瓦斯報警狀態以及人員定位狀態值。

表1 智能礦燈定位系統有線/無線數據傳輸格式定義數據表
4 系統測試應用
4.1 能耗測試
該智能礦燈由鋰電池供電,需至少持續照明8 h,需進行能耗測試。能耗測試電路由鋰電池(3 000 mAh)、示波器、10Ω電阻以及礦燈組成,一次測試礦燈數量為10個,測試工作周期為15 min,每個礦燈工作時間為5 min,通過示波器統計并計算設計的智能礦燈系統的單位功耗,能耗測試電路示意圖如圖5所示。
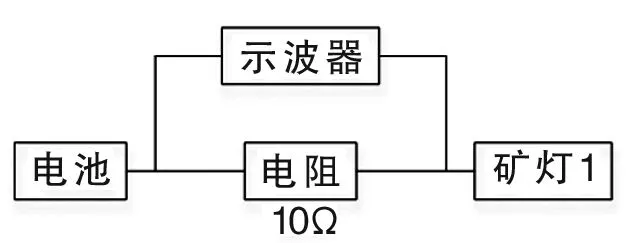
圖5 能耗測試電路示意圖
根據記錄并統計的能耗測試數據表2得知,該礦燈的待機功耗約為39 mA,每分鐘功耗約為62 mA,按照每天工作時間8 h,10個礦燈一天總功耗數值為22 800 mAh,滿足礦燈電池電量設計要求。

表2 10組礦燈能耗測試數據統計
4.2 瓦斯濃度測試
間隔50 m設置模擬瓦斯濃度監測點,在每一個監測點擺放一個定位系統以及一個礦燈,并經電纜與數據傳輸系統、地面監控系統(用計算機模擬)相連。測試時,依次開啟三個礦燈、三個定位系統,向隨機一個監測點密閉空間內釋放瓦斯氣體,通過計算機監控系統查看三個監測點的瓦斯濃度變化,可得出瓦斯濃度變化曲線圖,當瓦斯濃度超限后,發出聲光語音報警,測試曲線如圖6所示。

圖6 瓦斯濃度測試曲線
4.3 人員定位測試
進行人員定位測試時,模擬礦燈實際位置范圍為(50,0)~(500,0),間隔50 m設置一個礦燈,共10組。根據人員定位RSSI算法以及空間幾何原理計算礦燈位置坐標信息,與礦燈實際位置坐標對比并進行統計,詳細如表3所列。經10組數據測試,誤差范圍為1.6~3.1 m。
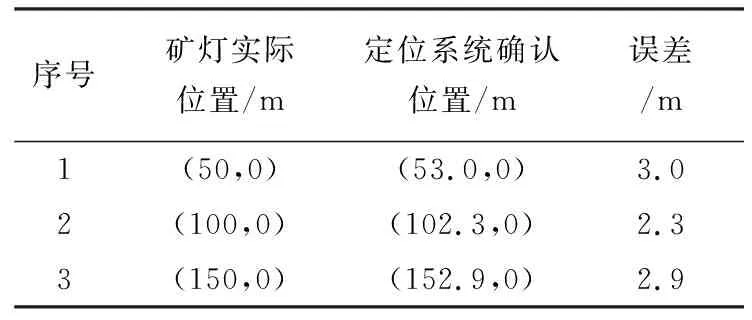
表3 人員定位數據統計表

續表3 人員定位數據統計表
5 結 論
(1) 基于瓦斯濃度監測和人員定位的智能礦燈以低功耗STC15W408AS芯片為核心,利用傳感器技術實現礦井瓦斯濃度和人員位置的實時監測;利用定位系統、數據傳輸系統實現礦井瓦斯濃度、人員實時位置信息的遠程地面監控,實現瓦斯濃度超限報警。
(2) 搭建智能礦燈試驗場景,完成能耗測試、瓦斯濃度測試以及人員定位測試。測試結果表明:①該礦燈能耗較低,可實現待機、休眠、空閑、工作四種模式無縫切換,保證照明時長大于8 h;②該礦燈實時監測并上傳礦燈所在位置瓦斯濃度信息,實現瓦斯濃度超限報警;③該礦燈可實現井下人員定位,定位誤差小于1%。
(3) 該礦燈實現了井下照明、瓦斯濃度監測、人員定位功能,對提升井下災害預警以及煤礦安全管理水平具有重要的意義。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
表面工程與再制造(2019年6期)2019-08-24 06:40:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32