基于憶阻器陣列的下一代儲(chǔ)池計(jì)算*
2022-07-28 07:31:14任寬張握瑜王菲郭澤鈺尚大山
物理學(xué)報(bào) 2022年14期
任寬 張握瑜 王菲 郭澤鈺 尚大山?
1) (中國(guó)科學(xué)院微電子研究所,微電子器件與集成技術(shù)重點(diǎn)實(shí)驗(yàn)室,北京 100029)
2) (西南交通大學(xué)超導(dǎo)與新能源研究開(kāi)發(fā)中心,磁浮技術(shù)與磁浮列車(chē)教育部重點(diǎn)實(shí)驗(yàn)室,成都 610031)
3) (中國(guó)科學(xué)院大學(xué),北京 100049)
儲(chǔ)池計(jì)算是類(lèi)腦計(jì)算范式的一種,具有結(jié)構(gòu)簡(jiǎn)單、訓(xùn)練參數(shù)少等特點(diǎn),在時(shí)序信號(hào)處理、混沌動(dòng)力學(xué)系統(tǒng)預(yù)測(cè)等方面有著巨大的應(yīng)用潛力.本文提出了一種基于存內(nèi)計(jì)算范式的儲(chǔ)池計(jì)算硬件實(shí)現(xiàn)方法,利用憶阻器陣列完成非線性向量自回歸過(guò)程中的矩陣向量乘法操作,有望進(jìn)一步提升儲(chǔ)池計(jì)算的能效.通過(guò)憶阻器陣列仿真實(shí)驗(yàn),在Lorenz63 時(shí)間序列預(yù)測(cè)任務(wù)中驗(yàn)證了該方法的可行性,以及該方法在噪聲條件下預(yù)測(cè)結(jié)果的魯棒性,并探究憶阻器陣列阻值精度對(duì)預(yù)測(cè)結(jié)果的影響.這一結(jié)果為儲(chǔ)池計(jì)算的硬件實(shí)現(xiàn)提供了一種新的途徑.
1 引言
理解生物大腦中信息的加工、處理模式,并在此基礎(chǔ)上構(gòu)建類(lèi)腦計(jì)算硬件系統(tǒng)是現(xiàn)代信息科學(xué)的前沿研究之一[1].研究表明,生物大腦等效于一個(gè)復(fù)雜神經(jīng)網(wǎng)絡(luò)動(dòng)力學(xué)系統(tǒng)[2],其處理外界信息的機(jī)能依賴于神經(jīng)網(wǎng)絡(luò)的動(dòng)力學(xué)過(guò)程[3].如何理解大腦的神經(jīng)動(dòng)力學(xué)過(guò)程、構(gòu)建類(lèi)腦動(dòng)力學(xué)系統(tǒng),是類(lèi)腦計(jì)算硬件系統(tǒng)實(shí)現(xiàn)的核心問(wèn)題[4].自然界中的信息大部分是用時(shí)序數(shù)據(jù)來(lái)定義的.大腦的動(dòng)力學(xué)系統(tǒng)受外部時(shí)序信號(hào)刺激,并將刺激產(chǎn)生的數(shù)據(jù)進(jìn)行編碼和存儲(chǔ)[5,6],進(jìn)而形成各類(lèi)認(rèn)知過(guò)程.循環(huán)神經(jīng)網(wǎng)絡(luò)(recurrent neural network,RNN)[7]是一種具有短時(shí)記憶能力的神經(jīng)網(wǎng)絡(luò),其中的神經(jīng)元通過(guò)具有環(huán)路的網(wǎng)絡(luò)結(jié)構(gòu),不僅可以接受其他神經(jīng)元的信息,也可以接受自身的信息,從而使網(wǎng)絡(luò)具有處理時(shí)序數(shù)據(jù)的能力,因此,更加適合模擬大腦的動(dòng)力學(xué)系統(tǒng).當(dāng)前,RNN 已經(jīng)被廣泛應(yīng)用于語(yǔ)音識(shí)別、自然語(yǔ)言處理等任務(wù)中.然而,由于梯度消失和爆炸問(wèn)題[8],RNN 需要的超參數(shù)多,而且訓(xùn)練過(guò)程復(fù)雜.因此,RNN 在硬件系統(tǒng)實(shí)現(xiàn)上依然面臨結(jié)構(gòu)復(fù)雜、訓(xùn)練時(shí)間長(zhǎng)和能耗高等問(wèn)題[9].
儲(chǔ)池計(jì)算(reservoir computing,RC)是RNN的一種簡(jiǎn)化形式.RC 概念最初的提出是為了模擬生物大腦中具有大量循環(huán)連接的皮質(zhì)紋狀體系統(tǒng)處理視覺(jué)空間序列信息的過(guò)程[10].隨后人們基于RNN 的框架,構(gòu)建了統(tǒng)一的RC 計(jì)算框架[11?13](如圖1(a)).RC 的核心是一個(gè)被稱為“儲(chǔ)池”的循環(huán)神經(jīng)網(wǎng)絡(luò)隱藏層.該網(wǎng)絡(luò)能夠?qū)r(shí)序輸入信號(hào)轉(zhuǎn)換到高維空間中.經(jīng)過(guò)高維轉(zhuǎn)換后,輸入信號(hào)的特征就可以更容易地通過(guò)簡(jiǎn)單線性回歸方法有效讀出.目前,RC 在時(shí)序信號(hào)處理[14]、混沌動(dòng)力學(xué)系統(tǒng)預(yù)測(cè)[15]等動(dòng)力學(xué)系統(tǒng)學(xué)習(xí)方面有良好的功能.值得注意的是,與標(biāo)準(zhǔn)RNN 相比[16],RC 中只需要訓(xùn)練輸出層權(quán)重,并且不需要反向傳播算法,有效避免了梯度消失問(wèn)題,因此,可以有效降低訓(xùn)練復(fù)雜度和訓(xùn)練時(shí)間.

圖1 三種RC 結(jié)構(gòu) (a) 傳統(tǒng)RC 結(jié)構(gòu);(b) 單節(jié)點(diǎn)延時(shí)RC結(jié)構(gòu);(c) 非線性向量自回歸RC 結(jié)構(gòu)Fig.1.Three types of RC frameworks:(a) Conventional RC;(b) RC using a single nonlinear node reservoir with time-delayed feedback;(c) NGRC,which is equivalent to nonlinear vector autoregression.
傳統(tǒng)RC 主要包括由Jaeger[11]提出的ESN 模型(echo state network)和Maass 等[13]提出的LSM(liquid state machine)模型,他們的結(jié)構(gòu)都如圖1(a)所示,包含輸入、儲(chǔ)池和輸出三部分.ESN模型的儲(chǔ)池和LSM 模型的儲(chǔ)池都為基于RNN 框架,由多個(gè)神經(jīng)元隨機(jī)連接而成的結(jié)構(gòu).所不同的是,ESN 模型中的神經(jīng)元是離散時(shí)間人工神經(jīng)元,而LSM 模型中的神經(jīng)元是具有興奮性和抑制性的脈沖神經(jīng)元.儲(chǔ)池計(jì)算模型結(jié)構(gòu)(以ESN 為例)可以用以下公式描述:

其中,u(n)為輸入向量,n為離散的時(shí)間,f表示儲(chǔ)池層單元的非線性激活函數(shù),Win為輸入連接儲(chǔ)池的權(quán)重矩陣,x(n)是所有離散時(shí)間人工神經(jīng)元的回聲狀態(tài)向量,W為神經(jīng)元間的連接矩陣,Wout為儲(chǔ)池連接輸出的權(quán)重矩陣,y(n)為輸出向量.儲(chǔ)池計(jì)算只需要訓(xùn)練輸出權(quán)重矩陣Wout,其性能取決于儲(chǔ)池神經(jīng)元間的連接矩陣W.當(dāng)W的譜半徑小于1 時(shí)(即特征值的絕對(duì)值的最大項(xiàng)),對(duì)任意輸入都可以得到對(duì)應(yīng)的回聲狀態(tài)屬性[17].節(jié)點(diǎn)的回聲狀態(tài)屬性等效于節(jié)點(diǎn)具備“衰退記憶”[18].人們從理論上證明了,由離散時(shí)間“衰退記憶”節(jié)點(diǎn)構(gòu)成的RC 網(wǎng)絡(luò)在輸入有界的情況下具備動(dòng)力學(xué)通用逼近能力[19].
這類(lèi)RC 的硬件實(shí)現(xiàn)方法可大致分為兩種:一種方法是通過(guò)使用神經(jīng)網(wǎng)絡(luò)硬件或神經(jīng)形態(tài)計(jì)算技術(shù)實(shí)現(xiàn),如用模擬電路[20]、FPGA(fieldprogrammable gate array)[21,22]、大規(guī)模集成電路[23]、憶阻器[24?26]等直接構(gòu)造儲(chǔ)池中多個(gè)隨機(jī)連接的神經(jīng)元.這種方法可靈活調(diào)整神經(jīng)元間連接的拓?fù)浣Y(jié)構(gòu)以改善性能,但是構(gòu)造神經(jīng)元需要的器件眾多,并且計(jì)算中每一個(gè)時(shí)間步都需要進(jìn)行大量計(jì)算以及存儲(chǔ)大量神經(jīng)元的狀態(tài).另一種方法是采用具備“衰退記憶”的物理節(jié)點(diǎn)代替隨機(jī)連接的神經(jīng)元,構(gòu)成儲(chǔ)池的動(dòng)力學(xué)系統(tǒng),如納米線網(wǎng)絡(luò)[27,28]、光學(xué)器件網(wǎng)絡(luò)[29]、易失性憶阻器網(wǎng)絡(luò)[30]等.這種方法利用物理節(jié)點(diǎn)的“衰退記憶”特性進(jìn)行計(jì)算.儲(chǔ)池的存與算在節(jié)點(diǎn)網(wǎng)絡(luò)中同時(shí)進(jìn)行.然而由隨機(jī)連接的物理節(jié)點(diǎn)構(gòu)成的動(dòng)力學(xué)系統(tǒng)無(wú)法調(diào)整節(jié)點(diǎn)連接的拓?fù)浣Y(jié)構(gòu),故這種方法在面對(duì)不同任務(wù)時(shí),RC 的性能具有一定的不穩(wěn)定性.
為了提高RC 的性能,研究人員對(duì)RC 結(jié)構(gòu)進(jìn)行了多種改進(jìn)(如多儲(chǔ)池計(jì)算[31]、進(jìn)化儲(chǔ)池計(jì)算[32]等),以及將RC 與其他特征提取方法(如卷積神經(jīng)網(wǎng)絡(luò)[33]、強(qiáng)化學(xué)習(xí)[34]、注意力學(xué)習(xí)[35]等)相結(jié)合.目前,傳統(tǒng)RC 及其改進(jìn)方法已經(jīng)成功地被應(yīng)用于眾多領(lǐng)域,如生物醫(yī)學(xué)、聲音識(shí)別、無(wú)線電等[36].然而,由于儲(chǔ)池結(jié)構(gòu)中神經(jīng)元很多,神經(jīng)元狀態(tài)存儲(chǔ)以及更新需要大量的硬件資源,并且由于神經(jīng)元連接拓?fù)浣Y(jié)構(gòu)難以調(diào)整,導(dǎo)致儲(chǔ)池計(jì)算的參數(shù)優(yōu)化困難.
RC 中神經(jīng)元節(jié)點(diǎn)間相互作用產(chǎn)生的高維信號(hào)可以通過(guò)延時(shí)動(dòng)力學(xué)系統(tǒng)來(lái)實(shí)現(xiàn).其狀態(tài)方程描述為[37]

其中,t為連續(xù)時(shí)間信號(hào),x(t)為系統(tǒng)的狀態(tài),F為系統(tǒng)函數(shù),τ為延時(shí)時(shí)間.2011 年,Appeltant 等[38]提出基于延時(shí)動(dòng)力學(xué)系統(tǒng)的單延時(shí)節(jié)點(diǎn)RC 結(jié)構(gòu)(見(jiàn)圖1(b)).輸入信號(hào)通過(guò)掩碼函數(shù)(masking)進(jìn)行時(shí)間復(fù)用,然后輸入到單個(gè)物理節(jié)點(diǎn)在時(shí)間維度上展開(kāi)的虛擬節(jié)點(diǎn)中.虛擬節(jié)點(diǎn)通過(guò)平等分割τ的N個(gè)時(shí)間點(diǎn)上來(lái)設(shè)置.兩個(gè)虛擬節(jié)點(diǎn)之間的時(shí)間間隔為θ=τ/N.所有虛擬節(jié)點(diǎn)x[t-(N-i)θ],i=1,···,N共同作為t時(shí)刻節(jié)點(diǎn)狀態(tài),并通過(guò)輸出層得到計(jì)算結(jié)果.
單節(jié)點(diǎn)延時(shí)RC 的提出,使得RC 的硬件實(shí)現(xiàn)變得更加便捷,在一定程度上解決了傳統(tǒng)儲(chǔ)池硬件實(shí)現(xiàn)中,由于神經(jīng)元數(shù)量多而導(dǎo)致的神經(jīng)元狀態(tài)存儲(chǔ)和更新硬件資源問(wèn)題.這種單節(jié)點(diǎn)延時(shí)儲(chǔ)池已經(jīng)在光子器件[39]、FPGAs[40]中得到硬件實(shí)現(xiàn),用于語(yǔ)音識(shí)別、圖像分類(lèi)和混沌預(yù)測(cè)等任務(wù)中.我們?cè)谇捌诠ぷ髦?利用鐵電隧道結(jié)(FTJ)中超薄鐵電層的退極化效應(yīng)產(chǎn)生的電流延時(shí)特性,實(shí)現(xiàn)了單節(jié)點(diǎn)延時(shí)儲(chǔ)池計(jì)算功能[41].為了拓展單節(jié)點(diǎn)延時(shí)RC功能,我們采用了多個(gè)單延時(shí)節(jié)點(diǎn)儲(chǔ)池并聯(lián)的方式,提高了計(jì)算的維度,實(shí)現(xiàn)了對(duì)動(dòng)態(tài)數(shù)字序列的識(shí)別功能[41].然而,由于虛擬節(jié)點(diǎn)是通過(guò)時(shí)間切分獲得,所以其連接拓?fù)浣Y(jié)構(gòu)是按時(shí)間順序固定的.這意味著這種延時(shí)儲(chǔ)池同樣存在著參數(shù)優(yōu)化困難的問(wèn)題.
最近,Gauthier 等[42]提出了一種新型RC,稱為下一代儲(chǔ)池計(jì)算(NGRC).NGRC 是一種特殊的非線性向量自回歸過(guò)程,其等效于具有線性激活節(jié)點(diǎn)的儲(chǔ)池與一個(gè)非線性讀出層的結(jié)合,如圖1(c)所示.NGRC 模型描述為

其中,i為離散時(shí)間,Olin,i為線性特征向量,X(i)為第i時(shí)刻的輸入向量,s為時(shí)間間隔,k為構(gòu)成線性特征向量的組數(shù),Ononlin,i為第i時(shí)刻非線性特征向量,功能為將符號(hào)兩邊項(xiàng)進(jìn)行外積、并收集外積結(jié)果的唯一單項(xiàng)式的運(yùn)算符號(hào),Ototal,i為第i時(shí)刻總特征向量,c為常數(shù)修正項(xiàng),Y (i)為輸出值,Wout為儲(chǔ)池連接輸出的權(quán)重矩陣.NGRC 目前被證實(shí)在完成短期動(dòng)態(tài)預(yù)測(cè)、長(zhǎng)期混沌預(yù)測(cè)、推斷動(dòng)力學(xué)系統(tǒng)不可見(jiàn)數(shù)據(jù)等三個(gè)方面有很好的性能.相對(duì)于傳統(tǒng)RC 和延時(shí)RC,NGRC 使用更小的數(shù)據(jù)集進(jìn)行訓(xùn)練,并避免了RC 的參數(shù)優(yōu)化困難問(wèn)題.然而,非線性向量自回歸過(guò)程本身仍需要大量硬件計(jì)算資源用于乘法計(jì)算操作.
憶阻器是近年廣受關(guān)注的一種具有記憶功能的器件[43].由憶阻器器件構(gòu)成的交叉陣列[44],可以通過(guò)歐姆定律和基爾霍夫定律,以存內(nèi)計(jì)算的方式原位、并行、物理地完成矩陣向量乘運(yùn)算,有效減少了計(jì)算過(guò)程中數(shù)據(jù)的搬運(yùn),從而具有功耗低、速度快的優(yōu)點(diǎn)[45?47].本文將NGRC 過(guò)程通過(guò)矩陣向量乘法操作簡(jiǎn)化,提出了一種NGRC 的存內(nèi)計(jì)算硬件實(shí)現(xiàn)方法,并利用憶阻器陣列完成矩陣向量乘法操作.通過(guò)進(jìn)行憶阻器陣列仿真完成了Lorenz63時(shí)間序列預(yù)測(cè)任務(wù),驗(yàn)證了該方法的可行性,并研究了憶阻器件電阻精度和波動(dòng)性對(duì)NGRC 預(yù)測(cè)精度的影響.這一結(jié)果為高能效RC 提供了一種新的途徑.
2 NGRC 的存內(nèi)實(shí)現(xiàn)方法
傳統(tǒng)RC 過(guò)程中,每一個(gè)時(shí)間步都需要更新大量具有“衰退記憶”特性的神經(jīng)元的狀態(tài),然而具有“衰退記憶”特性的線性神經(jīng)元組成的儲(chǔ)池與二次非線性讀出層組合,在數(shù)學(xué)上等效于一種特殊的非線性向量自回歸過(guò)程.NGRC 是對(duì)這種特殊的非線性向量自回歸過(guò)程的優(yōu)化[42].NGRC 過(guò)程與傳統(tǒng)儲(chǔ)池計(jì)算過(guò)程的相同點(diǎn)在于都只需要訓(xùn)練輸出權(quán)重,但是在輸入數(shù)據(jù)的選擇和將輸入數(shù)據(jù)進(jìn)行高維空間非線性轉(zhuǎn)換的方式上有所不同.
輸入數(shù)據(jù)方面,傳統(tǒng)儲(chǔ)池輸入數(shù)據(jù)一般為當(dāng)前時(shí)刻的數(shù)據(jù),而NGRC 的輸入數(shù)據(jù)中,除了當(dāng)前時(shí)刻的數(shù)據(jù),還包括之前時(shí)刻所對(duì)應(yīng)的數(shù)據(jù).高維空間非線性轉(zhuǎn)換方式方面,傳統(tǒng)儲(chǔ)池的高維空間非線性轉(zhuǎn)換通過(guò)儲(chǔ)池中具備“衰退記憶”神經(jīng)元的非線性激活函數(shù)達(dá)成.NGRC 結(jié)構(gòu)儲(chǔ)池的高維空間非線性轉(zhuǎn)換可分為3 個(gè)過(guò)程(見(jiàn)圖1(c)):1) 選擇不同時(shí)刻輸入數(shù)據(jù)構(gòu)成線性特征向量Olin;2)由線性特征向量構(gòu)造非線性特征向量Ononlin;3) 由線性特征向量與非線性特征向量構(gòu)造總特征向量Ototal.3 個(gè)過(guò)程中,線性特征Olin向量是由選擇的輸入數(shù)據(jù)直接拼接而成;總特征向量Ototal是由固定常數(shù)c、線性特征向量Olin與非線性特征向量Ononlin直接拼接而成;而由線性特征向量Olin構(gòu)造非線性特征向量Ononlin則需要經(jīng)過(guò)一個(gè)非線性轉(zhuǎn)換過(guò)程.NGRC中的非線性轉(zhuǎn)換過(guò)程將線性特征向量Olin通過(guò)外積操作映射到一個(gè)高維空間中,并在高維空間中去除對(duì)應(yīng)映射向量的重復(fù)部分,得到非線性特征向量Ononlin.
NGRC 的非線性轉(zhuǎn)換過(guò)程雖然避免了傳統(tǒng)儲(chǔ)池中隨機(jī)連接的性能不確定性與需要同時(shí)更新多個(gè)神經(jīng)元狀態(tài)的復(fù)雜性,但其向量間的外積操作與除去高維向量重復(fù)部分的操作仍然需要大量硬件開(kāi)銷(xiāo)與時(shí)間開(kāi)銷(xiāo).我們注意到相同向量間的外積可以用矩陣向量乘法(matrix vector multiplication,MVM)來(lái)表示,去除重復(fù)映射向量的操作可以通過(guò)保留外積后固定位置元素的值(保留元素操作)來(lái)實(shí)現(xiàn).硬件上,使用憶阻器陣列進(jìn)行MVM 操作,使用憶阻器陣列的選擇線電路進(jìn)行保留元素操作.
2.1 線性特征向量的構(gòu)建
圖2(a)為三維空間時(shí)序數(shù)據(jù)預(yù)測(cè)任務(wù)的NGRC儲(chǔ)池的存內(nèi)實(shí)現(xiàn)結(jié)構(gòu).其中,ti=i×Δt,Δt為采樣間隔,i為離散時(shí)間數(shù),s為時(shí)間間隔數(shù),x(t),y(t),z(t)分別表示預(yù)測(cè)點(diǎn)在t時(shí)刻的x軸、y軸、z軸三維空間坐標(biāo),k為每個(gè)線性特征向量所取數(shù)據(jù)的組數(shù).當(dāng)已知ti時(shí)刻及之前時(shí)刻點(diǎn)的軌跡坐標(biāo),要預(yù)測(cè)ti+1時(shí)刻點(diǎn)的坐標(biāo)時(shí),取k=2,即令ti時(shí)刻和ti-s時(shí)刻空間點(diǎn)的三維坐標(biāo)構(gòu)建第i個(gè)線性特征向量Olin,i,有

其中,[xi,yi,zi]與[xi-s,yi-s,zi-s]為ti時(shí)刻與ti-s時(shí)刻點(diǎn)的三維坐標(biāo).將構(gòu)建的線性特征向量Olin,i用時(shí)序電壓脈沖幅值編碼和電導(dǎo)編碼,編碼的電壓序列矩陣Vlin,i為

其中列向量Vlin,i,a的第a行的值,為線性特征向量Olin,i中第a個(gè)元素對(duì)應(yīng)的量化電壓值,列向量中的其他值為零.線性特征向量Olin,i編碼的電導(dǎo)矩陣為

其中,Glin,i,a為Olin,i中的第a個(gè)元素對(duì)應(yīng)的量化電導(dǎo)值.將電導(dǎo)序列使用差分編碼存儲(chǔ)到憶阻器陣列中;再將電壓序列Vlin,i通過(guò)Bitline 輸入到憶阻陣列中,具體過(guò)程如圖2(b)所示.需要指出的是,電壓脈沖幅值編碼需要經(jīng)過(guò)一個(gè)數(shù)模轉(zhuǎn)換器(DAC).DAC 的精度與憶阻器本身的精度影響著整體精度.
2.2 非線性特征向量的構(gòu)建
構(gòu)建非線性特征向量需要對(duì)線性特征向量進(jìn)行外積操作與保留元素操作.憶阻器陣列中,每通過(guò)一個(gè)電壓序列向量Vlin,i,a,能從陣列輸出端(SL)得到一個(gè)電流向量Ilin,i,a,總電流矩陣由歐姆定律和基爾霍夫定律可表達(dá)為

保留Ilin,i矩陣中的非零元素,Ilin,i,a保留元素操作后的向量為Ilin,i,ap,保留元素操作可通過(guò)只讀取憶阻器陣列電流輸出中對(duì)應(yīng)位置的輸出實(shí)現(xiàn),過(guò)程如圖2(a)中綠框部分所示,將選擇讀取的輸出電流組成非線性特征向量Ononlin,i,可表達(dá)為
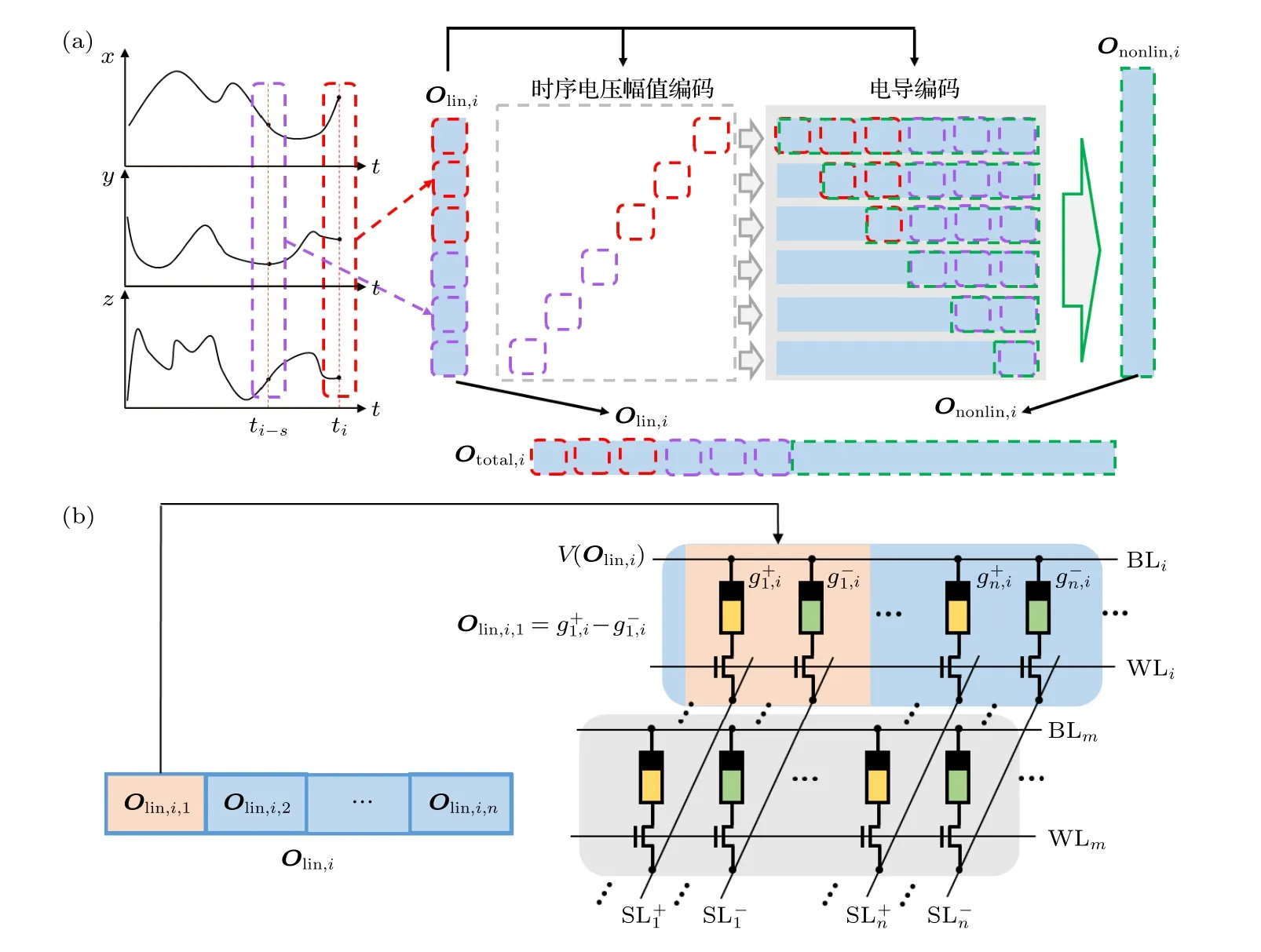
圖2 基于憶阻陣列的NGRC 儲(chǔ)池結(jié)構(gòu) (a)用于預(yù)測(cè)三維時(shí)序信號(hào)的NGRC 儲(chǔ)池結(jié)構(gòu).輸入為三維時(shí)序信號(hào);提取ti 時(shí)刻(紅色框)和ti-s(紫色框)時(shí)刻信號(hào)的值組成線性特征向量Olin,將第i 個(gè)線性特征向量編碼為時(shí)序電壓和電導(dǎo),時(shí)序電壓作為憶阻器陣列的輸入,電導(dǎo)映射到憶阻器陣列上作為權(quán)重;非線性特征向量Ononlin由憶阻器陣列特定單元(綠色方框)的輸出構(gòu)成;總特征向量由Olin與Ononlin直接拼接而成.(b) 圖(a)中的線性特征向量Olin,i映射到憶阻器陣列的方式.Olin,i中的每一個(gè)值都由兩個(gè)憶阻器電導(dǎo)的差分g+,g–表示Fig.2.Structure of the NGRC based on memristor-based crossbar.(a) Structure of the NGRC reservoir for three dimensional (3D)timing signals predicting.The input is a 3D timing signal.The linear feature vector Olin is formed by extracting the signal values of ti time (red box) and ti-s time (purple box).The ith linear feature vector is encoded as timing voltage and conductance,and the timing voltage is the input of the memristor array,and the conductance is mapped to the memristor array as weight.The nonlinear feature vector Ononlin consists of the outputs of specific elements of the memristor array (green boxes).The total feature vector is directly spliced by Olin and Ononlin.(b) The way the linear feature vector Olin, i in panel (a) mapping to the memristor array.The g+and g– represent the device conductance values for the positive and negative weights in the differential pair,respectively.
2.3 總特征向量的構(gòu)建及輸出
ti時(shí)刻的總特征向量Ototal,i是由固定常數(shù)c、線性特征向量Olin,i與非線性特征向量Ononlin,i直接拼接而成,表示為

ti+1時(shí)刻點(diǎn)的預(yù)測(cè)位置可直接由總特征向量乘以輸出權(quán)重得出:

其中,[xi+1,yi+1,zi+1]為所預(yù)測(cè)的ti+1時(shí)刻點(diǎn)的三維坐標(biāo),Wout為預(yù)先用嶺回歸方法訓(xùn)練好的輸出權(quán)重矩陣.值得注意的是,憶阻器電流值的讀出需要一個(gè)模數(shù)轉(zhuǎn)換器(ADC),ADC 的精度也會(huì)對(duì)最終預(yù)測(cè)精度造成一定影響.
2.4 訓(xùn)練過(guò)程
儲(chǔ)池訓(xùn)練過(guò)程只訓(xùn)練輸出層Wout,訓(xùn)練采用嶺回歸方法,先用訓(xùn)練數(shù)據(jù)集得到由特征向量組成的特征矩陣Ototal,以及所有特征向量對(duì)應(yīng)的輸出組成的結(jié)果矩陣Yd,嶺回歸方法表達(dá)為

2.5 仿真平臺(tái)
仿真平臺(tái)基于python 3.8,pytorch1.9.1(主機(jī)GPU 型號(hào)NVIDIA GeForce RTX 3080,CPU 型號(hào)i9-11980HK)構(gòu)建,其結(jié)構(gòu)示意圖如圖3 所示,可分為輸入部分、權(quán)重部分和輸出部分.
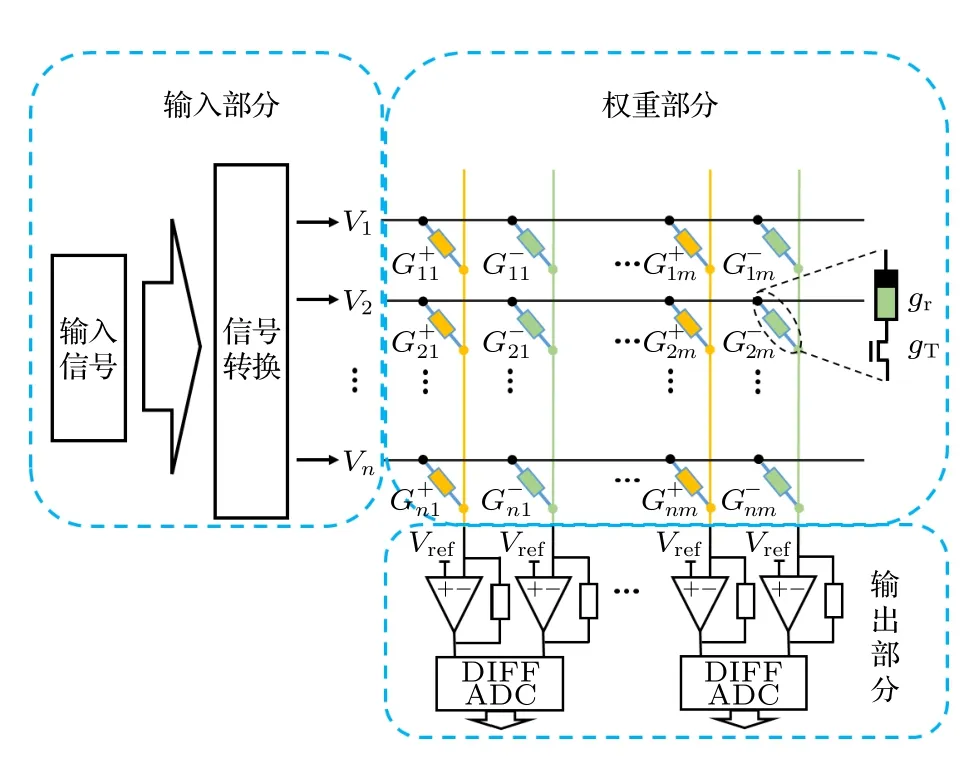
圖3 基于憶阻器陣列(包括正、負(fù)列)的矩陣乘法運(yùn)算仿真平臺(tái)結(jié)構(gòu)示意圖,gr 為憶阻器的電導(dǎo),gT 為晶體管電導(dǎo)Fig.3.Simulation platform of memristor array (including positive and negative arrays) as analog dot-product engine.The memristor conductance corresponds to gr and the transistor conductance corresponds to gT.
輸入部分模擬將外界信號(hào)轉(zhuǎn)換為電壓信號(hào)的過(guò)程,最高轉(zhuǎn)換精度為定點(diǎn)32 bit.權(quán)重部分模擬將外界信號(hào)映射到憶阻器陣列中(將帶符號(hào)的權(quán)重映射到一對(duì)憶阻器差分電導(dǎo)上)并進(jìn)行運(yùn)算的過(guò)程,量化電導(dǎo)映射公式為

其中n為權(quán)重精度(單位 bit),Gmax和Gmin為憶阻器可變化的最大電導(dǎo)與最小電導(dǎo),[x]為取整操作,W為需要映射的權(quán)重,G為映射到憶阻器陣列對(duì)應(yīng)位置的電導(dǎo)值.輸出部分模擬憶阻器陣列輸出經(jīng)過(guò)ADC 轉(zhuǎn)變?yōu)殡娔X可處理數(shù)據(jù)的過(guò)程,輸出精度為所使用ADC 的精度.
3 實(shí)驗(yàn)結(jié)果與討論
動(dòng)力學(xué)系統(tǒng)的短期預(yù)測(cè)能力與動(dòng)力學(xué)系統(tǒng)的長(zhǎng)期預(yù)測(cè)能力通常被用來(lái)作為衡量RC 性能的基準(zhǔn),我們將用經(jīng)典混沌動(dòng)力學(xué)系統(tǒng)模型-Lorenz63模型的短期預(yù)測(cè)任務(wù)與長(zhǎng)期預(yù)測(cè)任務(wù),驗(yàn)證基于憶阻器陣列實(shí)現(xiàn)的NGRC 結(jié)構(gòu)的可行性及其對(duì)噪聲的魯棒性.Lorenz63 是1963 年洛倫茲[48]提出來(lái)的天氣預(yù)測(cè)模型,由3 個(gè)方程組成:

其中狀態(tài)X(t) ≡ [x,y,z]T是一個(gè)分量為Rayleigh-Bénard 的對(duì)流可觀測(cè)量的矢量,a=10,b=28,c=8/3.Lorenz63 模型確定性的混沌行為體現(xiàn)在其對(duì)初始條件的敏感依賴(蝴蝶效應(yīng)),以及在相空間軌跡形成奇異吸引子(圖3).
動(dòng)態(tài)系統(tǒng)的預(yù)測(cè)任務(wù)中,用原序列(由動(dòng)態(tài)系統(tǒng)方程得到的序列)與預(yù)測(cè)序列(儲(chǔ)池不斷將此時(shí)刻輸出值作為下一時(shí)刻的輸入值進(jìn)行預(yù)測(cè)得到的序列)之間的結(jié)構(gòu)相似度來(lái)衡量預(yù)測(cè)效果.就Lorenz63 時(shí)間序列預(yù)測(cè)任務(wù)而言,歸一化均方根誤差(NRMSE)可在一定程度上衡量短預(yù)測(cè)期內(nèi)的結(jié)構(gòu)相似度,但難以反映長(zhǎng)期預(yù)測(cè)的結(jié)構(gòu)相似度.Lorenz63 時(shí)間序列預(yù)測(cè)的z回歸圖能直觀地反映z變量的長(zhǎng)期行為,比較原序列與預(yù)測(cè)序列的z回歸圖可以定性地比較兩個(gè)序列長(zhǎng)時(shí)段的結(jié)構(gòu)相似度.在之后的Lorenz63 時(shí)間序列預(yù)測(cè)任務(wù)中,NRMSE衡量短期預(yù)測(cè)(1 個(gè)李雅普諾夫周期)的結(jié)構(gòu)相似度,通過(guò)比較量原序列與預(yù)測(cè)序列的z回歸圖衡量長(zhǎng)期預(yù)測(cè)的結(jié)構(gòu)相似度.
在基于憶阻器陣列實(shí)現(xiàn)的NGRC 結(jié)構(gòu)的可行性驗(yàn)證實(shí)驗(yàn)中,維持系統(tǒng)的輸入精度不變,通過(guò)改變系統(tǒng)的權(quán)重精度(憶阻陣列中憶阻器的量化映射比特?cái)?shù))和輸出精度(憶阻器陣列輸出ADC 比特?cái)?shù)),研究不同權(quán)重精度和輸出精度對(duì)預(yù)測(cè)結(jié)果的結(jié)構(gòu)相似度的影響.在基于憶阻器陣列實(shí)現(xiàn)的NGRC結(jié)構(gòu)對(duì)噪聲的魯棒性驗(yàn)證實(shí)驗(yàn)中,維持輸入精度和輸出精度不變,研究不同權(quán)重精度以及不同噪聲大小對(duì)預(yù)測(cè)結(jié)果的結(jié)構(gòu)相似度的影響.
3.1 可行性驗(yàn)證實(shí)驗(yàn)
保持輸入精度為定點(diǎn)32 bit,輸出精度為定點(diǎn)64 bit,在權(quán)重精度為4,6,8,16,32 和64 bit 情況下進(jìn)行預(yù)測(cè)實(shí)驗(yàn).800 個(gè)時(shí)間步的預(yù)測(cè)結(jié)果及其xz截面圖如圖4 所示.可以看出,權(quán)重精度在4 和6 bit 時(shí)無(wú)法產(chǎn)生混沌現(xiàn)象(無(wú)洛倫茲吸引子);當(dāng)權(quán)重精度達(dá)到8 bit 及以上時(shí),開(kāi)始產(chǎn)生明顯的洛倫茲混沌吸引子.這一結(jié)果意味著權(quán)重精度對(duì)混沌的產(chǎn)生有重要影響.當(dāng)憶阻器陣列對(duì)應(yīng)的權(quán)重精度達(dá)到一定值時(shí),基于憶阻器陣列實(shí)現(xiàn)的NGRC 結(jié)構(gòu)構(gòu)成的系統(tǒng)能由穩(wěn)定狀態(tài)過(guò)渡到混沌狀態(tài).

圖4 輸入精度為定點(diǎn)32 bit,輸出精度為定點(diǎn)64 bit,不同權(quán)重精度下800 個(gè)時(shí)間步的預(yù)測(cè)XZ 截面圖 (a) 64 bit;(b) 32 bit;(c) 16 bit;(d) 8 bit;(e) 6 bit;(f) 4 bitFig.4.The XZ cross sections of 800 time steps with different weight precision,when input precision of integer is 32 bit and output precision of integer is 64 bit:(a) 64 bit;(b) 32 bit;(c) 16 bit;(d) 8 bit;(e) 6 bit;(f) 4 bit.
保持輸入精度為定點(diǎn)32 bit,通過(guò)改變權(quán)重精度以及輸出精度,在達(dá)到混沌狀態(tài)的前提下探究短期預(yù)測(cè)結(jié)構(gòu)相似度與權(quán)重精度的關(guān)系.圖5 為短期預(yù)測(cè)(1 個(gè)李雅普諾夫周期)的NRMSE 隨不同權(quán)重精度(8,16,32,64 bit)和不同輸出精度(8,16,32,64 bit)的變化.結(jié)果顯示,當(dāng)基于憶阻器陣列實(shí)現(xiàn)的NGRC 結(jié)構(gòu)構(gòu)成的系統(tǒng)達(dá)到產(chǎn)生混沌所需的權(quán)重精度和輸出精度時(shí),短期預(yù)測(cè)的性能隨著權(quán)重精度、輸出精度的增加而增加.在權(quán)重精度不變的情況下,當(dāng)輸出精度達(dá)到16 bit,輸出精度的增加對(duì)短期預(yù)測(cè)結(jié)構(gòu)相似度幾乎無(wú)影響;在輸出精度不變的情況下,短期預(yù)測(cè)結(jié)構(gòu)相似度隨著權(quán)重精度的增加而變高(NRMSE 變小),8 bit 權(quán)重精度下的NRMSE 低于0.05,16 bit 權(quán)重精度下的NRMSE接近于0,當(dāng)權(quán)重精度超過(guò)16 bit 時(shí),權(quán)重精度的增加對(duì)短期預(yù)測(cè)結(jié)構(gòu)相似度幾乎無(wú)影響.

圖5 短期預(yù)測(cè)(1 個(gè)李雅普諾夫周期)的NRMSE 隨不同權(quán)重精度(8,16,32,64 bit)和不同輸出精度(8,16,32,64 bit)的變化Fig.5.The variation diagram of NRMSE for short-term prediction (1 Lyapunov cycle) with different weight precision (8,16,32,64 bit) and different output precision (8,16,32,64 bit).
Lorenz63 系統(tǒng)的z分量在連續(xù)的局部極大值之間具有函數(shù)關(guān)系,通過(guò)找到z分量的連續(xù)局部極大值Mi并根據(jù)Mi+1畫(huà)出Mi形成z回歸圖,可以簡(jiǎn)潔地展現(xiàn)z變量的長(zhǎng)期行為.Lorenz63 系統(tǒng)的z回歸圖如圖6 所示,紫色點(diǎn)為真實(shí)序列z回歸圖,其他顏色為輸入精度為定點(diǎn)32 bit,輸出精度為定點(diǎn)64 bit,權(quán)重精度分別為8,16,32,64 bit 的z回歸圖.結(jié)果顯示,權(quán)重精度為8 bit 時(shí)的z回歸圖相比真實(shí)序列的回歸圖有明顯偏移;當(dāng)權(quán)重精度在16 bit 及以上時(shí),預(yù)測(cè)的回歸圖幾乎完全覆蓋了真實(shí)序列的回歸圖;隨著權(quán)重精度的增加,預(yù)測(cè)的回歸圖往真實(shí)序列的回歸圖收斂.

圖6 (a) Lorenz63 的z 回歸圖(紫色)與不同權(quán)重精度下預(yù)測(cè)的z 回歸圖;(b)圖(a)紅框區(qū)域標(biāo)記中的放大圖Fig.6.(a) The z return map of Lorenz63 (purple) overlaid with the z return map under different weight accuracy;(b) detail of the region marked in Fig.(a).
3.2 噪聲魯棒性驗(yàn)證實(shí)驗(yàn)
在保持輸入精度為定點(diǎn)32 bit,輸出精度為定點(diǎn)64 bit,給權(quán)重(即憶阻器電導(dǎo)G)添加高斯噪聲NoiseN(0,σ),其中σ=G×10-4×percent為方差,percent 表示噪聲強(qiáng)度百分比.短期預(yù)測(cè)結(jié)構(gòu)相似度的NRMSE 隨權(quán)重噪聲強(qiáng)度變化的結(jié)果如圖7所示.當(dāng)權(quán)重精度在8 bit 時(shí),隨著σ的增大,短期預(yù)測(cè)結(jié)構(gòu)相似度的NRMSE 會(huì)先降低后升高;當(dāng)權(quán)重精度在16 bit 時(shí),短期預(yù)測(cè)結(jié)構(gòu)相似度的NRMSE也會(huì)先降低后升高,但降低點(diǎn)對(duì)應(yīng)的噪聲強(qiáng)度比權(quán)重精度在8 bit 時(shí)小;當(dāng)權(quán)重精度在16 bit 以上時(shí),短期預(yù)測(cè)的NRMSE 會(huì)隨著percent 的增大而增大.由于量化本身具備一定的抗噪聲能力,故權(quán)重精度越低,噪聲對(duì)短期預(yù)測(cè)結(jié)構(gòu)相似度的NRMSE的影響越小;值得注意的是,一定程度的噪聲有利于提升短期預(yù)測(cè)性能,并且量化的比特?cái)?shù)越高,能帶來(lái)增益的噪聲強(qiáng)度越小.
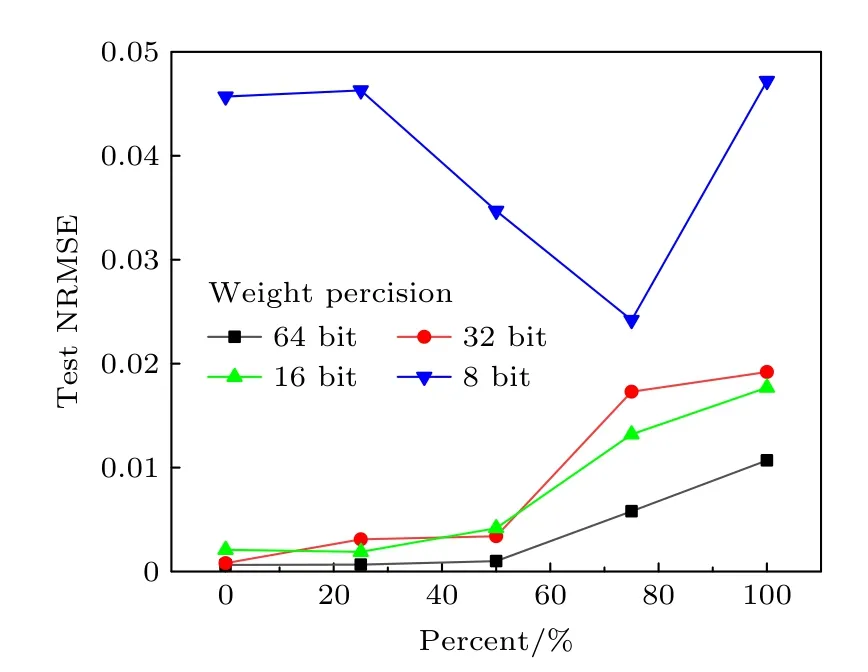
圖7 短期預(yù)測(cè)結(jié)構(gòu)相似度的NRMSE 在不同權(quán)重精度條件下隨權(quán)重噪聲強(qiáng)度的變化Fig.7.The variation of NRMSE under different weight precision conditions for short-term prediction with increasing weight noise intensity.
3.3 討論
基于憶阻器陣列的NGRC 存內(nèi)實(shí)現(xiàn)具備兩方面的優(yōu)勢(shì):第一,就NGRC 算法本身而言,相對(duì)于傳統(tǒng)儲(chǔ)池計(jì)算和基于延時(shí)的儲(chǔ)池計(jì)算,NGRC 的儲(chǔ)池具備更短的激活時(shí)間、更少的參數(shù)訓(xùn)練量以及更快的訓(xùn)練和推理速度[42];第二,就存內(nèi)計(jì)算方面而言,NGRC 中提取非線性特征向量的過(guò)程需要大量的乘法操作,而憶阻器陣列相比傳統(tǒng)CMOS電路,在矩陣向量乘法方面具備更快的計(jì)算速度和更低的功耗[49].然而,使用憶阻器陣列進(jìn)行NGRC的過(guò)程中,每一次推理過(guò)程都需要在憶阻器陣列中寫(xiě)入采樣數(shù)據(jù);同時(shí),仿真結(jié)果表明,憶阻器陣列中每個(gè)憶阻器精度達(dá)到8 bit,Lorenz63 才能有較好的預(yù)測(cè)結(jié)果.考慮到當(dāng)前憶阻器還存在各種非理想性因素,因此,如何進(jìn)一步提高寫(xiě)入效率,同時(shí)降低所需憶阻器的阻值精度還需進(jìn)一步探索.
4 結(jié)論
儲(chǔ)池計(jì)算自提出至今可以分為傳統(tǒng)儲(chǔ)池計(jì)算、延時(shí)儲(chǔ)池計(jì)算和下一代儲(chǔ)池計(jì)算三個(gè)階段.儲(chǔ)池計(jì)算性能上的優(yōu)勢(shì)不僅來(lái)自于算法自身,而且與硬件的實(shí)現(xiàn)方式密切相關(guān).本文在總結(jié)儲(chǔ)池計(jì)算發(fā)展歷程的基礎(chǔ)上,提出一種基于存內(nèi)計(jì)算范式的硬件實(shí)現(xiàn)方法,將NGRC 過(guò)程通過(guò)矩陣向量乘法操作簡(jiǎn)化,并利用憶阻器陣列完成矩陣向量乘法操作.憶阻器陣列仿真實(shí)驗(yàn)驗(yàn)證了這一方法在Lorenz63 三維時(shí)間序列預(yù)測(cè)任務(wù)中的可行性.仿真實(shí)驗(yàn)結(jié)果表明,預(yù)測(cè)效果與輸出精度和權(quán)重精度密切相關(guān).當(dāng)輸出精度達(dá)到16 bit,進(jìn)一步提高輸出精度對(duì)預(yù)測(cè)效果的影響可忽略不計(jì),并且具有良好的抗噪聲能力;當(dāng)權(quán)重精度達(dá)到8 bit,對(duì)Lorenz63 三維時(shí)間序列預(yù)測(cè)的短期預(yù)測(cè)(1 個(gè)李雅普諾夫時(shí)間)就可以有良好的預(yù)測(cè)效果(NRMSE 小于0.05),并可以在一定程度進(jìn)行長(zhǎng)期預(yù)測(cè).這些結(jié)果為NGRC 的硬件實(shí)現(xiàn)提供了一種新的途徑,同時(shí)也展現(xiàn)了憶阻器陣列在開(kāi)發(fā)基于儲(chǔ)池計(jì)算的實(shí)時(shí)、低能耗邊緣計(jì)算系統(tǒng)方面的潛力.
