直驅式輸電線路作業車BP神經網絡調速控制
2022-08-01 04:21:54馬利群范學軍闞志忠
燕山大學學報 2022年4期
馬利群,范學軍,闞志忠
(1.邯鄲欣和電力建設有限公司,河北 邯鄲 056004; 2.國網河北省電力有限公司邯鄲供電分公司,河北 邯鄲 056004; 3. 燕山大學 電氣工程學院, 河北 秦皇島 066004)
0 引言
在電力系統中進行封網施工作業是防止在更換“三跨”型輸電線路(跨鐵路、跨高速、跨輸電通道)導地線過程中,因導地線墜落可能導致嚴重交通事故的有效手段。利用封網作業車替代傳統人力方式可使得施工人員避免身處高危環境,防止人員高空摔落及觸電,節省封網作業成本和時間。研究能夠適應多種工況(架空線線徑,檔距、弧垂、導線表面摩擦力等諸多不同)、對線路損傷低、可滿足穿越帶電線路、高速公路電氣化鐵路等線路進行封網的直驅式輕型封網作業車具有重要的實用價值[1]。
如圖1所示的永磁直流電機直接驅動滾輪在線路上運行的封網作業車因省卻減速齒輪,具有結構簡單、重量輕等優點,但也因電機軸與被拖動滾輪直接耦合導致其轉軸機械轉動慣量易受負載慣量變化影響,電機運行在柔性軌道,其轉速易受到負載特性變化的直接影響。直驅式封網作業車直流電機調速系統面臨高空不確定性風阻力和摩擦阻力等擾動,且直流電機調速系統存在多變量耦合、系統非線性以及系統參數時變、不確定等擾動問題。為改善傳統的固定系數比例、積分、微分(PID)控制性能,有學者對自適應、模糊、神經網絡PID相融合的智能控制算法開展了研究工作[2-3],但是此文獻中的被控制對象并非為多變量耦合的電機系統,進入21世紀的近十年,研究人員試圖進一步將智能算法與PID控制器相結合應用于通用型機電運動系統[4-12],這樣既保留了傳統PID控制的特有優勢,又能夠在線實時調整PID參數,從而保證被控制對象具有良好的動靜態性能。人工神經網絡為解決非線性、參數不確定系統的控制問題提供了一種方法,其中文獻[4-5]將BP神經網絡PID控制方法初步應用于直流電機控制,以應對某些控制環境條件變化對傳統PID直流電機轉速控制性能影響,但此兩篇文獻均未有針對性地明確提及影響直流電機轉速控制性能的具體環境條件。此后,文獻[6-10]研究了永磁電機的轉速BP神經網絡控制方法,永磁電機作為一種多變量、強耦合的非線性系統,要求控制算法實時性高,此文獻提出的方法存在算法復雜不容易實現的問題。文獻[6]在把無刷電機為單輸入單輸出特殊非線性模型基礎上,開展BP神經網絡PID控制研究,文獻[7]研究了變更神經網絡學習速率的無刷直流電機神經網絡控制,文獻[8]研究了基于Q學習優化神經網絡連接權重的無刷電機控制,文獻[9] 研究了無刷直流電機驅動器的模糊神經網絡(FNN)學習控制方法。FNN將模糊邏輯與人工神經網絡的學習能力相結合。設計了一個FNN結構,并定義了四種不同的FNN訓練算法,文獻[11]研究了利用神經網絡提高風電裝配平臺中液壓伺服系統位置控制精度的方法。文獻[12]將BP神經網絡應用于磁懸浮軸承磁軸承控制,以改善磁懸浮軸承的動態性能。
本文將BP神經網絡算法與傳統PID相結合,研究直驅式封網機作業車的轉速控制,提高作業車協同工作能力,抗輸電線路撓度變化、摩擦力變化、負載質量變化等擾動,提出一種以轉速閉環控制響應特性為目標的神經網絡連接權重修改方法。通過神經網絡學習自動整定PID參數,使得直驅式直流電機調速系統能夠適應電機轉軸轉動慣量寬范圍變化對調速系統穩定性的影響,最終使得直流調速系統具有良好的調速性能。
1 直流電機調速系統數學模型
1.1 直流電機動態模型
圖2為他勵直流電機電樞回路的等效電路和電機軸拖動負載運行的機械系統簡化模型,其中Udc為電樞電源電壓,L為電樞回路的漏電感,R為電樞回路總電阻,E表示電機電樞電動勢(簡稱電勢),Id為電樞電流,n表示電機軸轉速,直流電機的電樞回路動態方程以及電動機軸的動力學方程分別為
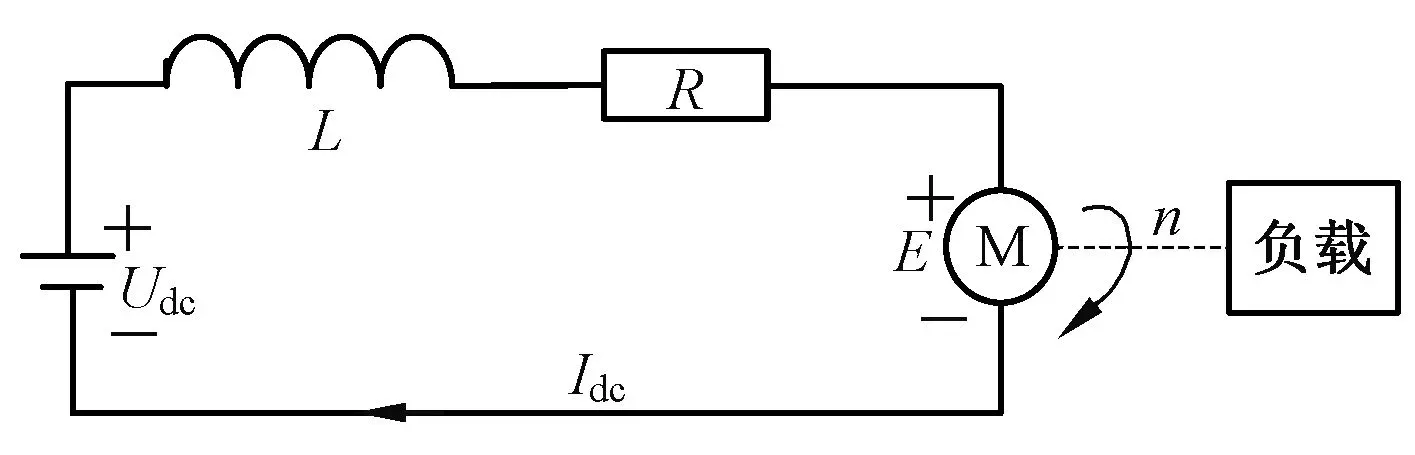
圖2 直流電機與負載的等效模型Fig.2 Equivalent model of DC motor and load
(1)
(2)
式中:TL為折算到封網直流電機軸的負載轉矩,包括摩擦力,風阻力,重力;GD2為電機軸上總飛輪慣量,為電機軸和負載慣量折算到電機軸的轉動慣量之和。
在額定勵磁作用下,直流電機的感應電動勢E和電磁轉矩Tem分別為
E=Cen,
(3)
Tem=CmId,
(4)
定義直流電機電樞回路的電磁時間常數,Tl和機電時間常數Tm分別為
(5)
(6)
此時將式(5)和式(6)代入式(1)和式(2),并結合式(3)和式(4),整理后進行拉氏變換分別得
(7)
(8)
式中,IdL為負載電流。
結合式(7)和式(8),得到直流電機的動態結構框圖,如圖3所示。
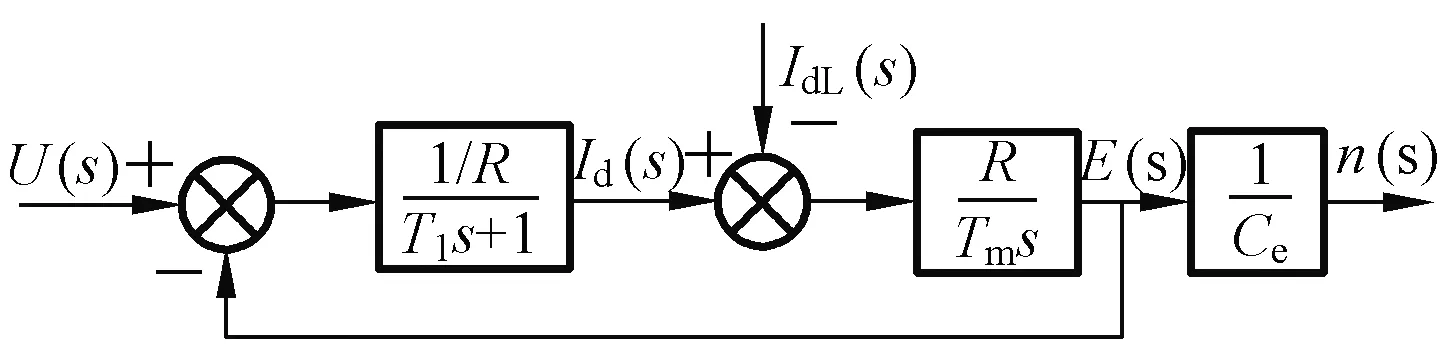
圖3 直流電機的動態結構框圖Fig.3 Block diagram of dynamic DC motor
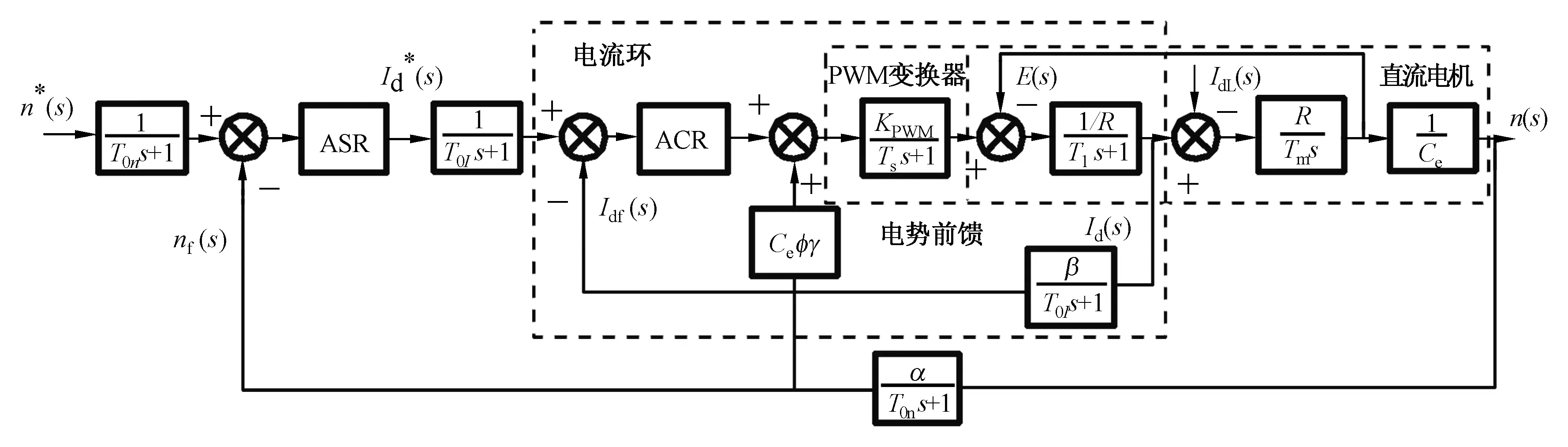
圖4 雙閉環直流調速系統動態結構圖Fig.4 Block diagram of dynamic DC motor drive system with double closed loop
1.2 傳統PID控制閉環分析
傳統的雙閉環控制直流電機調速系統中電流調節器ACR和轉速調節器ASR一般采用PID結構形式,轉速ASR和電樞電流ACR調節器的PID控制器均可表示為如圖5所示結構。PID調節器由比例環節、積分環節和微分環節三部分組成,vin表示輸入量(轉速給定和電流給定),vout表示被控對象的輸出量(電樞電流,電機轉速)。
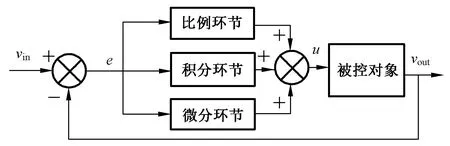
圖5 PID控制系統框圖Fig.5 Block diagram of control system with PID controller
PID控制器的輸出量u與輸入誤差e的連續域表達式為
(9)
對PID表達式離散化后得到其增量表達式為
(10)
式中,kp、ki和kd分別為比例調節系數、積分調節系數和微分調節系數,Ts為直流電機調速系統轉速閉環控制的采樣周期,即開關周期。
封網作業車的直流電機的電流環為傳統PID調節器,要求PID設計參數滿足電樞電流動態響應特性,最終使得系統運行時能夠保證電樞電流超調量、調節時間、上升時間等動態指標滿足要求,為此,要求電流環具有高跟隨性能,其傳遞函數設計為典型I型系統。
假設電流調節器為PI調節器,調節器的比例系數為kpI,積分系數為kiI,則圖4所示直流調速系統圖中電樞電流環閉環傳遞函數為
(11)
(12)
(13)
(14)
其中,
由傳遞函數式(14)可見,轉速閉環系統為含有零點的二階系統,則調速系統轉速階躍響應參數中超調量為
(15)
其中,
上升時間為
(16)
調節時間為

(17)
同理,電樞電流擾動與轉速之間的閉環傳遞函數為
由直流電機的轉速動態性能指標式(15)~(17)以及傳遞函數式(14)可見,當Tm因直流電機的轉動慣量變化時,理想情況下,如果保持轉速調節器比例積分系數kpn和kin隨Tm變化,則可實現轉速控制的動態性能指標不變。反之,根據直流電機轉速階躍響應特性在線修正轉速調節器比例、積分、微分系數可優化PID轉速調節器控制的動態性能。由式(15)~(17)可見,轉速調節器比例積分微分系數與轉速階躍響應之間為非線性關系,因此本文提出適于解決此非線性問題的BP神經網絡PID參數優化控制方案。
2 BP神經網絡PID控制及參數優化
由于傳統PID控制器中三個調節參數固定不變,當輸電線路作業車面臨作業環境的非線性和時變不確定性,該控制方法無法滿足復雜場合下對電機高精度及高性能的要求。BP神經網絡同時兼備學習和記憶兩種功能,適合用于解決非線性、不確定系統的控制問題,本文將PID控制器和BP神經網絡進行結合,對PID參數實時調整,從而實現復雜場合下提高直流電機轉速動態性能和轉速控制精度,進而提高直驅式封網作業車直流電機調速系統抗負載擾動能力。
封網作業車電機BP神經網絡PID控制系統框圖如圖6所示,其中BP神經網絡的輸入量為封網作業車直流電機轉速參考值n*,轉速為n,轉速誤差為e,BP神經網絡的輸出信號為PID控制器參數系數kp、ki、kd,PID控制器輸出信號u為直流電機電樞電流給定信號,直流電機電樞電流調節器ACR仍為圖4所示的傳統PID調節器,nN為直流電機的額定轉速。
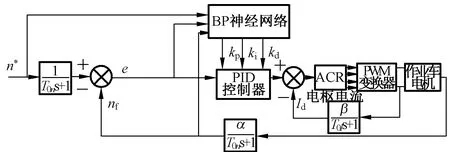
圖6 BP神經網絡PID控制系統Fig.6 Control system with BP-NN PID controller

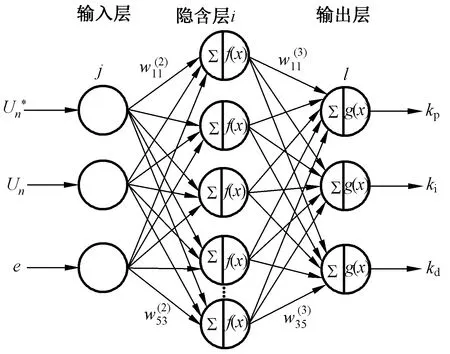
圖7 三層BP神經網絡框圖Fig.7 Block diagram of three-layer BP neural network
本文設置BP神經網絡為包含輸入層、隱含層、輸出層的3層結構,其中輸入層和輸出層神經元個數為3,隱含層中包含的神經元個數為8,隱含層和輸出層激活函數分別為正負對稱的Sigmoid函數f(x)和非負的Sigmoid函數g(x),本文中BP神經網絡PID控制器的具體算法為:
(18)
(19)
隱含層的神經元輸入和輸出量分別為
(20)
(21)

輸出層神經元的輸入和輸出量分別為
(22)

(23)

隱含層函數為雙極性Sigmoid函數,
(24)
其導數為
(25)
輸出層函數為單極性Sigmoid函數,
(26)
其導數為
g′(x)=αg(x)[1-g(x)]。
(27)
BP神經網絡PID調節器系數kp、ki和kd分別為
(28)
下面討論BP神經網絡PID控制策略的誤差反向傳播算法。首先設定神經網絡權重系數修正的指標函數為
(29)

按照梯度下降法加慣性項的算法,多次迭代修正圖7中所示神經元的連接權重,第κ次迭代計算BP神經網絡隱含層元i與輸出層神經元l連接權重系數增量Δwil(κ)為
(30)
同時,第κ次迭代計算BP神經網絡輸入層神經元j與隱含層神經元i連接權重系數增量為
(31)
式中,η1,η2為學習率,α1、α2為慣性系數。
根據PID的表達式(10),求出式(30)和(31)中的部分偏導數并標幺化處理后寫為
(32)
將式(25)、(27)、(29)、(32)代入式(30),最終隱含層神經元i與輸出層神經元l的連接權重系數的增量函數Δwil(κ)可以表示為
(33)
輸入層神經元j與隱含層神經元i連接權重系數的增量函數Δwji(κ)可以表示為
(34)
圖8為直流電機BP神經網絡PID控制的流程圖。

圖8 直流電機BP-NN PID控制流程圖Fig.8 Flow chart of BP-NN PID control for DC motor
3 仿真驗證
利用MATLAB軟件建立的直流電機轉速BP神經網絡PID優化控制仿真模型如圖9所示,仿真參數如表1所示。
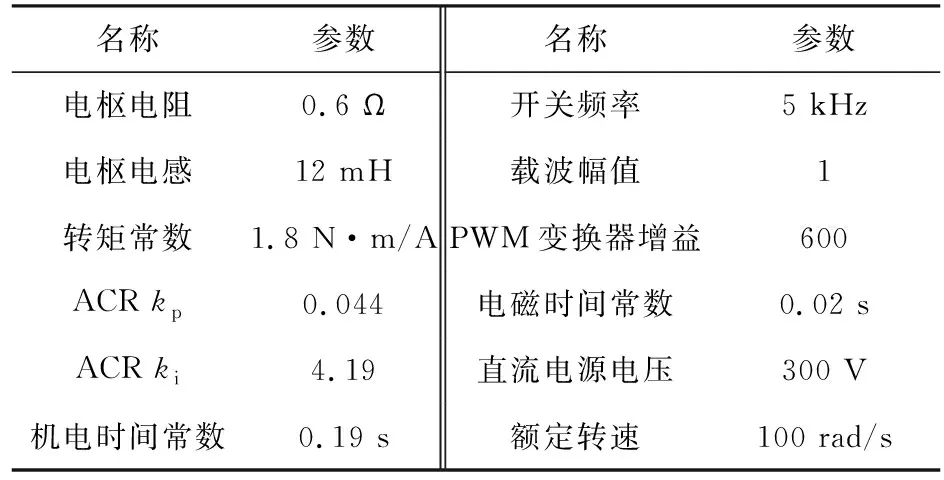
表1 直流電機調速系統仿真參數Tab.1 Parameters of DC motor driving system
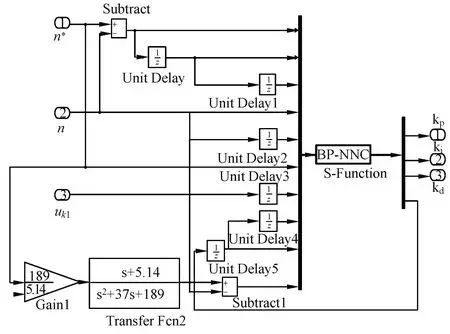
圖9 BP神經網絡轉速控制仿真模型Fig.9 Simulation model of BP neural network for speedcontrol
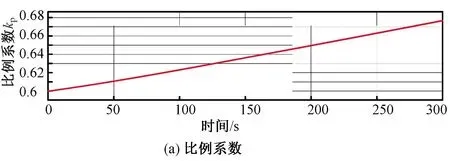
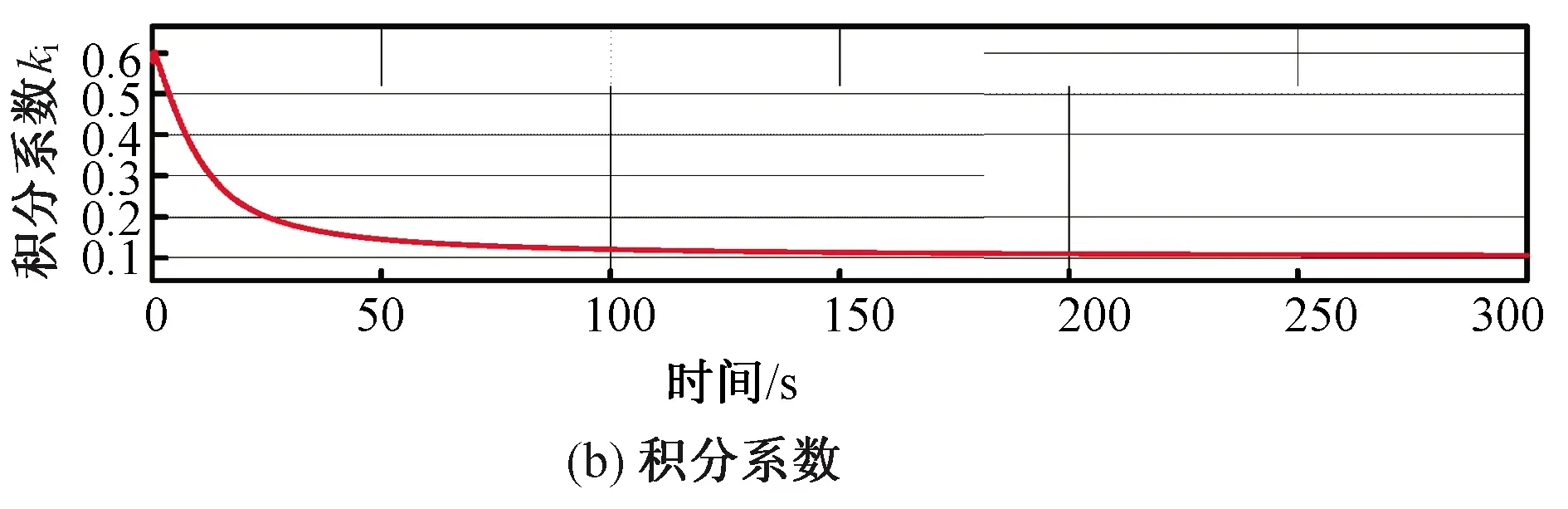
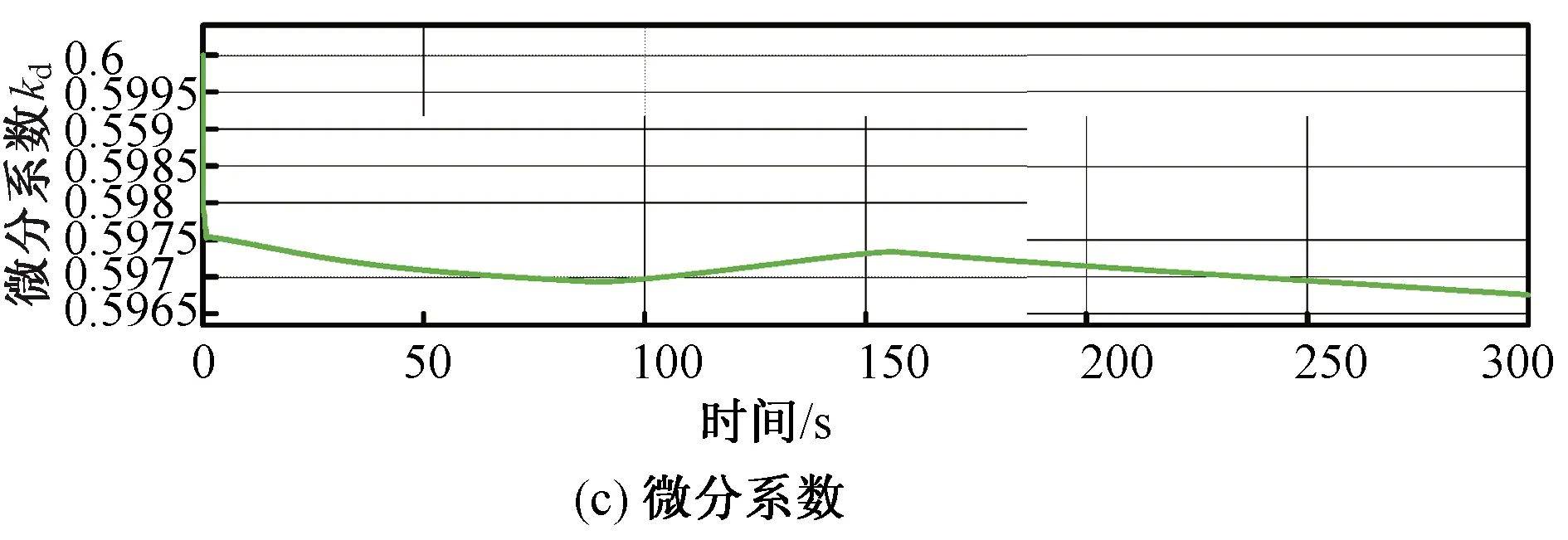
在直流調速系統的轉動轉動慣量為0.4 kg·m2情況下對BP神經網絡PID控制的直流電機調速系統進行仿真,仿真時間設定為300 s,在仿真過程中通過加入轉速給定的脈沖擾動對BP神經網絡連接權重系數進行訓練,最終得到BP神經網絡PID控制的直流電機調速系統仿真波形如圖10所示,其中圖10(a)~(c)分別是以標幺值表示的神經網絡輸出的比例、積分和微分系數仿真波形,PID參數的基準值為1 000。由仿真波形可見,比例系數隨時間變化的增量較小,認為其趨于穩定,積分和微分系數的波形收斂到較穩定值。圖10(d)為轉速給定n*和實際轉速n的仿真波形,n在為恒定值0.2疊加幅值0.03的脈沖信號,脈沖周期為0.4 s,由n的仿真波形可見,神經網絡PID控制的直流電機轉速跟蹤轉速給定信號,實現了直流電機轉速無靜差控制,轉速無超調,可見其轉速控制動態快速性較好。

圖10 轉動慣量0.4 kg·m2 BP神經網絡PID控制仿真波形Fig.10 Simulation waveform of BP neural network PID control under moment of inertia 0.4 kg·m2
在直流調速系統的轉動慣量為0.1 kg·m2情況下對BP神經網絡PID控制的直流電機調速系統進行仿真,再次訓練BP神經網絡的連接權重系數,仿真時間設定為300 s,292.5~294 s時間段仿真的放大波形如圖11所示,其中圖11(a)為轉速給定n*和轉速n的仿真波形,圖11(b)為轉速誤差仿真波形,由仿真波形可見,直流電機輸出轉速仍然能夠快速跟蹤轉速給定信號且轉速靜態誤差為零。
在直流調速系統的轉動慣量為0.1 kg·m2情況下采用傳統PID控制對系統進行仿真對比分析以說明傳統PID控制存在適應轉動慣量變化能力較弱的問題,仿真波形如圖12所示,傳統PID比例積分微分系數與圖10中300 s時刻BP神經網絡輸出PID系數相同,根據圖10(a)~(c)分別得到PID系數分別為1 000倍0.68,0.1,0.596,由圖12(a)可見直流電機輸出轉速能夠跟蹤轉速給定信號且轉速穩定,轉速無超調,但對比圖11(a)和12(a)的仿真結果,發現采用在轉動慣量為0.4 kg·m2情況下訓練神經網絡得到的PID系數作為傳統的PID控制器參數可適應轉動慣量為0.1 kg·m2直流電機調速系統的穩定控制需要,但轉速控制動態響應參數中的超調量小,封網機器人直流電機轉速控制的快速性降低。圖12(b)為直流電機電樞電流的仿真波形及其放大波形。
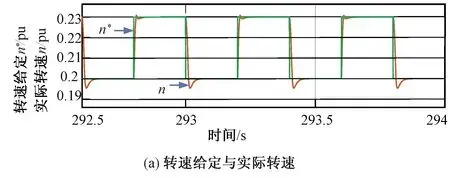
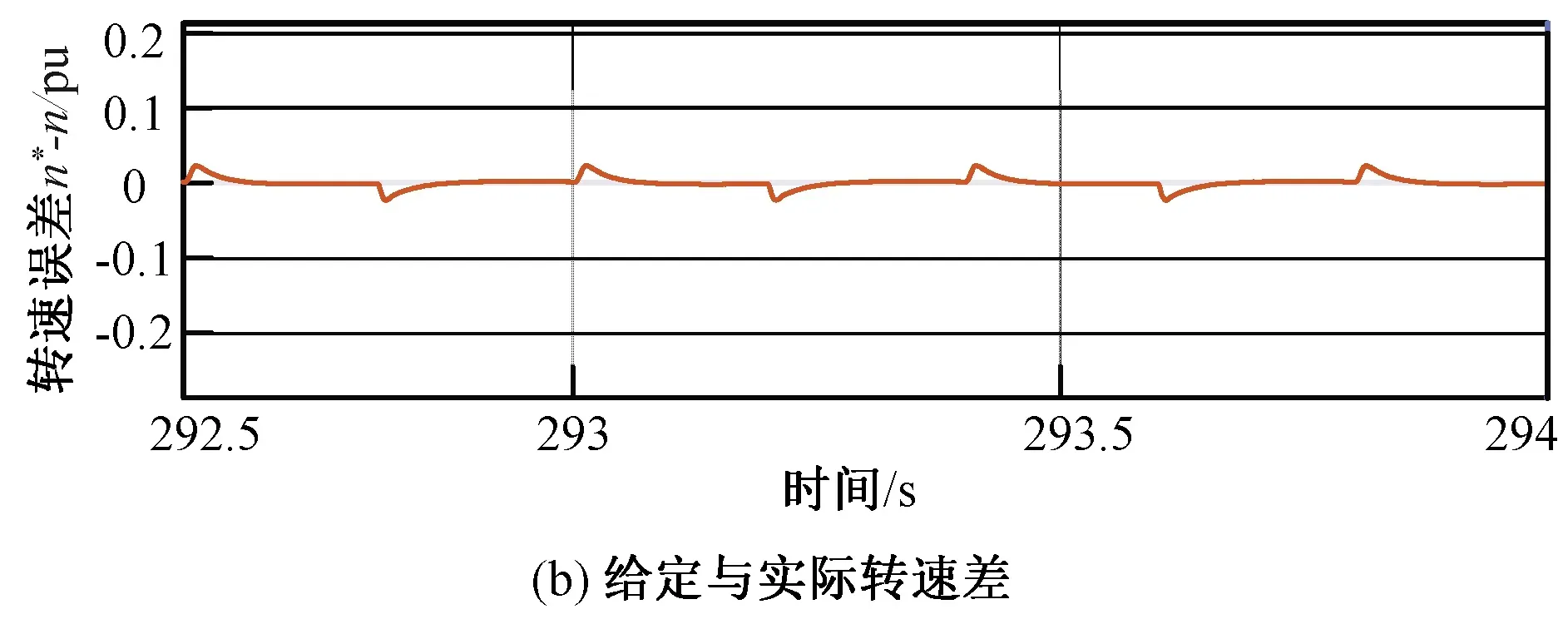
圖11 轉動慣量0.1 kg·m2 BP神經網絡PID控制的仿真波形Fig.11 Simulation waveform of BP neural network PID control under the condition of inertia J=0.1 kg·m2
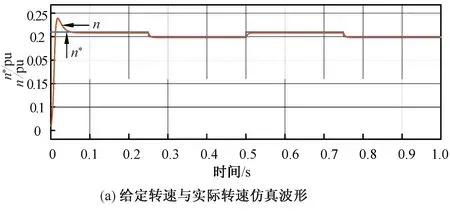
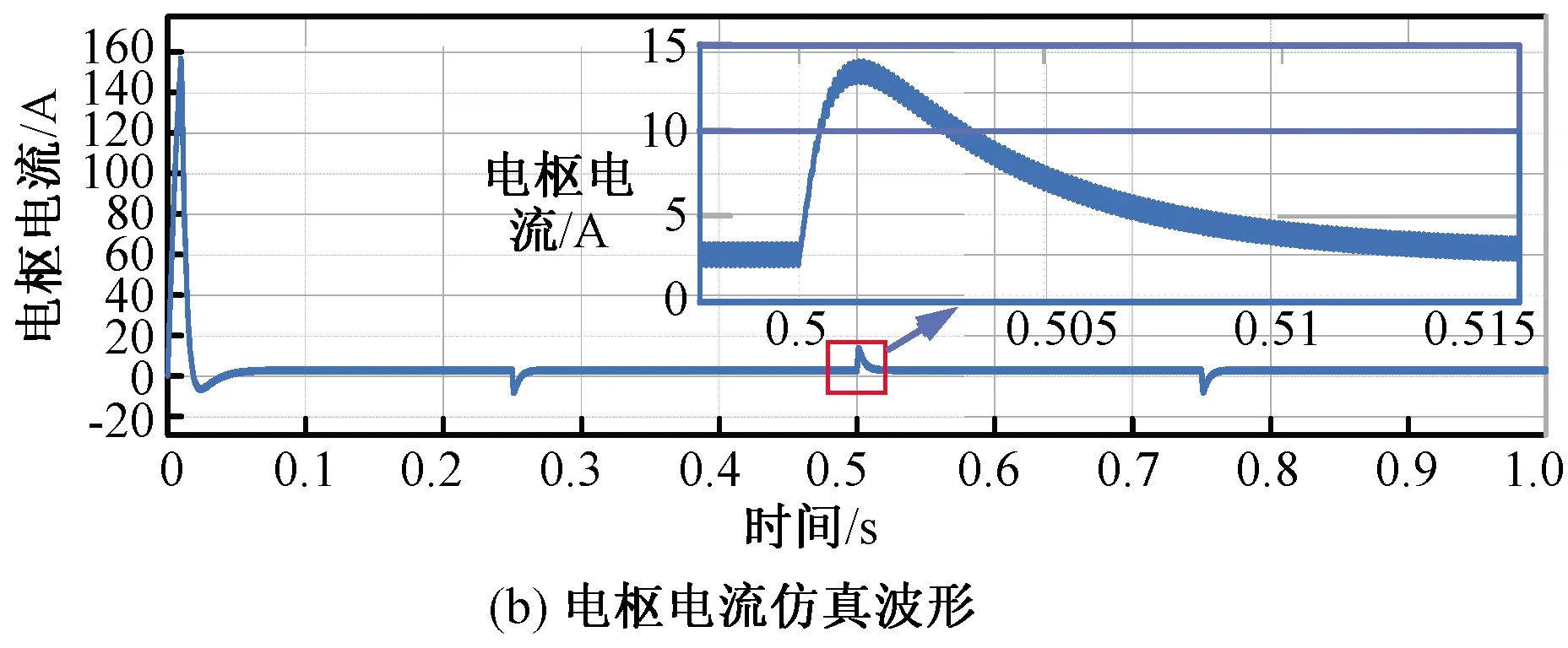
圖12 轉動慣量0.1 kg·m2傳統PID控制仿真波形Fig.12 Simulation waveform of traditional PID control under the condition of inertia J=0.1 kg·m2
對比圖10、圖11和圖12可見,相對于傳統的PID控制,BP神經網絡PID控制直流電機調速系統能夠減小直流電機調速的超調量,提高轉速響應時間,改善調速動態響應性能。
4 結論
為了使直驅式輸電線路作業車直流調速系統適應負載變化等復雜工況,降低負載轉動慣量變化對直流電機轉速控制系統穩定性和控制性能的影響,最終實現降低作業車重量目的,提出了以轉速閉環控制動態特性為優化目標的BP神經網絡PID直流電機轉速控制策略,改進了BP神經網絡連接權重的修正方法,使得BP神經網絡PID轉速控制器進一步適應輸電線路作業車在復雜作業環境下的調速要求,仿真對比表明,通過實時優化神經網絡PID參數可提高輸電線路作業車轉速控制的動、靜態性能。相對于傳統的PID控制,BP神經網絡PID控制直流電機調速系統能夠減小調速的超調量、提高轉速響應時間,改善調速動態響應性能。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08
