電子機械制動器的間隙調控方法
2022-08-02 00:37:16劉志強陳玉錦陳林
兵工學報 2022年7期
劉志強, 陳玉錦, 陳林
(1.江蘇大學 汽車與交通工程學院, 江蘇 鎮江 212013;2.江蘇恒力制動器制造有限公司 創新企管部, 江蘇 靖江 214512)
0 引言
隨著汽車行業整體的發展,智能化和電子化技術來越多地得到應用。為提高汽車的制動效能與安全性,作為線控制動系統之一的電子機械制動系統逐漸成為人們研究的焦點。制動系統是保證行車安全的重要組成部分。傳統液壓制動系統主要由制動主缸、制動輪缸、液壓管路、制動器等組成。傳統液壓制動系統在工作時,駕駛員踏下制動踏板帶動推桿推動液壓主缸的活塞,其產生的推力克服復位彈簧的拉力,從而使制動塊壓緊制動盤產生制動力。然而傳統液壓機械制動系統因液壓管路分支較多并且油壓上升與下降存在遲滯現象,引起制動遲滯從而影響行車制動安全。另外,復雜的液壓管路會導致汽車布置防抱死制動系統(ABS)、車身電子穩定系統(ESP)等控制裝置的難度增大。與液壓機械制動系統相比,電子機械制動系統采用電作為動力源便于控制,取消了復雜的液壓執行機構,并具有結構簡單、體積小、響應速度快、控制精度高、節能環保等優點。除此之外,EMB更便于與ABS、ESP進行集成以簡化結構,節省空間。
EMB主要由力矩電機、減速增矩機構、運動轉換機構、鉗體等組成。國外對EMB的有關研究比較早,一些著名的汽車零部件公司,如德國博世(Bosch)、美國天合(TRW)、韓國萬都(Mando)等公司已經開發出各自的EMB執行機構,并進行了部分實車試驗。國內對EMB的研究起步較晚,主要集中在高校,如清華大學、吉林大學、同濟大學開展了對EMB執行器的研究并進行了相關的實驗。
汽車的制動過程是一個高轉矩、高溫、高壓的滑磨過程,易使制動摩擦片表面發生氧化而產生磨損,造成制動間隙增大,嚴重影響行車安全。為解決此問題,廣泛采用以下兩種方案:1)增加機械自動調節裝置,完成間隙的自動補償。但這會引起整體機構臃腫,并且維修不便;2)采用大量傳感器進行相關信號的檢測,然后利用控制系統進行間隙調控,雖然控制效果較好,但過多的傳感裝置會要求較大的安裝空間,不利于汽車的輕量化。葛正等提出利用電機電流的變化特征分別識別制動塊與制動盤接觸與分離臨界點的間隙調控策略。通過設定電流閾值的方法識別制動間隙的消除臨界點,利用電流對時間的微分識別制動塊與制動盤的分離臨界點。但采用設置電流閾值的方法識別制動間隙消除臨界點需要大量的實驗才能獲得較準確電流閾值,并且對于不同車型的EMB,由于采用力矩電機的型號不同,電流的閾值也不相同,不具有普遍性。
根據以上存在問題,本文提出一種利用電機轉速與電流的變化特征分別識別制動間隙消除與分離臨界點的間隙調控策略,并通過設置電流上下限閾值約束條件提高識別精度。其控制系統采用基于PID三閉環的控制策略。
1 電子機械制動系統的設計
1.1 電子機械制動系統的組成
電子機械制動系統主要包括傳感器,中央控制器(ECU)、電機控制器、EMB(執行器)等。其中傳感器的作用是將物理信號轉化為電信號,并將信號傳遞給ECU。中央控制器的作用是接受各種不同類型傳感器傳來的信號并進行分析和判斷,最后輸出控制信號。電機控制器的作用是接受中央控制器的控制信號并調節電機兩端電壓。電子機械制動系統的信號傳遞示意圖如圖1所示。

圖1 電子機械制動系統示意圖Fig.1 Schematic diagram of the EMB system
1.2 電子機械執行器的設計
電子機械執行器的設計流程如圖2所示。首先要選取參考車型以確定整車參數。根據整車參數知,單輪液壓制動器活塞缸中產生的最大液壓力15 MPa,其活塞直徑為50 mm。為確保汽車制動時能夠盡快消除制動間隙提高制動響應速率,初選消除制動間隙的時間閾值為0.1 s,制動間隙為0.3 mm。經過設計分析,確定減速增矩機構減速比為12.75,力矩電機為廣州市德馬克電機有限公司生產的型號為D58LD200-36A-30S的電機。

圖2 電子機械制動器的設計流程Fig.2 Design process of the EMB
1.3 EMB控制系統
電子機械控制系統的作用是:調節力矩電機的電壓,保證制動間隙的快速消除,提高制動響應速率,并保證制動器的最大制動夾緊力。EMB控制系統采用基于壓力環、轉速環、電流環串聯而成的三閉環結構。三環均為PI控制,外環為壓力環,目標值為控制器輸入的目標制動壓力,是系統的主要控制量,用來控制系統夾緊力;中環為轉速環,起調節轉速、提高執行器響應速度的作用,目標值為壓力環的輸出量;內環為電流環,能夠對電流的擾動起到調節作用,并且能在啟動或壓力變化時,充分發揮電機過載能力,提高控制系統的動態響應品質,目標值為轉速環的輸出量。
對各個控制環的要求如下:設計壓力控制環時,應確保制動壓力的超調不高于5%,消除制動間隙的時間不超過閾值0.1 s。設計轉速控制環時,應保證在啟動過程中電流維持飽和,以加快消除制動間隙速度。設計電流控制環時,應確保其超調量不超過2%。所設計的控制系統中,壓力控制環,轉速控制環,電流控制環的比例和積分系數分別為0.65、0.12,0.54、0.22,1.5、0.9。
2 EMB執行器數學模型的建立
EMB主要包括力矩電機,運動轉換機構,減速增矩機構三部分。其中電機提供動力,減速增矩機構降低電機傳遞的轉速增大其轉矩,運動轉換機構是將減速增矩機構傳遞的旋轉運動轉化為軸向移動。所設計的EMB的結構簡化示意圖如圖3所示。工作時,電機帶動二級行星齒輪減速器進行減速增矩,再經過滾珠絲杠將旋轉運動轉化為套筒的軸向移動,從而套筒帶動制動摩擦片壓緊制動盤進行制動。
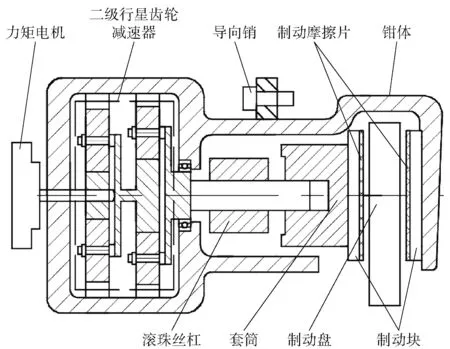
圖3 EMB結構示意圖Fig.3 Schematic diagram of the EMB structure
2.1 電機模型
無刷直流力矩電機(BLDC)采用電子換向取消了電刷和換向器,不會產生火花和磨損,具有壽命長、效率高等優點。為了便于建模,對電機模型進行了簡化,其工作原理如圖4所示。

圖4 力矩電機工作原理圖Fig.4 Schematic diagram of the torque motor
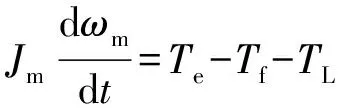
根據其工作原理,可得其動態方程如下:
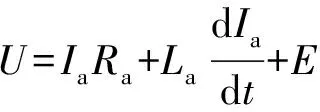
(1)
==
(2)
(3)
==
(4)
式中:為電樞電壓;為電樞電流;為電樞電阻;為電樞電感;為反電動勢;為電動勢常數;為每極氣隙磁通;為電機轉速;為電勢系數;為電機轉速;為等效轉動慣量;為電機電磁轉矩;為電機摩擦轉矩;為負載轉矩;為轉矩常數;為轉矩系數。
211 電機的工作特性

(5)
由(5)式知電機在一定負載或空載(=0)下,轉速與電壓呈線性關系。
212 電機堵轉特性
EMB制動時,要有持續的堵轉能力,才能保證穩定的制動效能。電機堵轉時,電壓全部加載電樞電阻上,可得

(6)

(7)
由(7)式可知,當電機處于堵轉狀態時,電樞電壓與堵轉轉矩呈線性關系。
2.2 電機靜態摩擦模型
常用的靜態摩擦模型主要有庫倫模型、庫倫+黏滯模型、靜摩擦+庫倫+黏滯模型、Stribeck模型。Stribeck模型對真實摩擦力的擬合準確率較高,因此采用該模型模擬電機的內部機械摩擦。其數學表達公式如下:

(8)
式中:為庫侖摩擦力矩;為電機轉速;為Stribeck速度;為黏性摩擦系數;為經驗常數,一般為05~10之間。
2.3 二級行星齒輪減速器數學模型
二級行星齒輪減速器是用來降低電機傳遞的高轉速,增大輸出轉矩。由分析知,力矩電機輸出轉角與滾珠絲杠轉角關系表達式如下:
(9)
式中:為二級行星齒輪機構減速比;為滾珠絲杠轉角;為電機輸出轉角。
2.4 負載模型
制動夾緊力是滾珠絲杠機構將旋轉運動轉換為套筒的軸向移動產生的。電機的負載轉矩是通過二級行星齒輪減速增矩機構傳遞給滾珠絲杠機構的。由分析知,滾珠絲杠上的驅動力矩和夾緊力之間關系如(10)式所示,滾珠絲杠上的驅動力矩與電機負載轉矩的關系如(11)式所示:

(10)
(11)
式中:為滾珠絲杠驅動力矩;為夾緊力;為絲杠導程角;為當量摩擦角;為絲杠公稱直徑。

圖5 夾緊力- 形變量曲線圖Fig.5 Clamping force vs. deformation curve
當制動器完成制動間隙消除,即進入電機的堵轉狀態。電機在堵轉狀態時,制動盤夾緊力與制動摩擦片的形變量為三次多項式的非線性關系。采用MATLAB/Curve fitting工具對本課題所搭建的EMB執行機構試驗臺實驗數據進行擬合如圖5所示,由擬合結果知,制動夾緊力與制動摩擦片形變量的關系如下:
=1 0492+20 1619+1555
(12)
式中:為制動摩擦片的形變量。
3 EMB仿真模型建立
EMB在工作時,其制動過程一般可分為制動間隙消除階段,制動力跟隨階段,制動間隙產生階段。
在制動間隙消除階段,要求電機響應速度較快,能夠在很短時間內達到最高轉速以求盡快消除制動間隙。當制動盤與制動摩擦片恰好接觸時即制動間隙剛好消除,此狀態稱為接觸臨界點。根據設計要求,制動間隙消除時間應該控制在時間閾值0.1 s之內。在制動力跟隨階段,要求制動器能夠并且盡快到達最大夾緊力,以保證制動器的制動效能,從而減小制動距離提高行車安全。在制動間隙產生階段,要求制動器能夠保證穩定的制動間隙,以保證行車安全。當制動盤與制動摩擦片恰好分離時,制動夾緊力會突然變為零,此狀態稱為分離臨界點。
根據以上各個傳動部件的數學模型(1)式~(12)式,在MATLAB/Simlink環境下建立如圖6所示的仿真模型。

圖6 EMB仿真模型圖Fig.6 EMB simulation model
4 間隙調控與仿真分析
EMB的間隙調控流程如圖7所示。當駕駛員發出制動命令時,將制動信號傳遞給EMB的中央控制單元(ECU),中央控制單元向電機控制器發出制動指令,電機控制器給力矩電機施加正向電壓。在PID控制系統作用下,力矩電機快速正轉帶動二級行星齒輪減速增矩機構減速增矩,再經滾珠絲杠將旋轉運動轉化為套筒的軸向移動進行制動間隙的消除。根據電機轉速信號判斷制動間隙是否消除完畢,如果沒有,繼續進行快速消除。接著進入制動力跟隨階段,在制動力跟隨階段,力矩電機在PID控制系統的作用下繼續正轉,直到達到目標夾緊力。當車輛停止或完成制動目的后,進入制動間隙產生階段。在制動間隙產生階段,中央控制單元向電機控制器發出指令,電機控制器給力矩電機施加反向電壓。在PID控制系統作用下力矩電機快速反轉,根據電流信號判斷是否到達分離臨界點,如果沒有,則電機繼續反轉直到達到分離臨界點。最后中央控制單元控制電機轉動的時間保證穩定的制動間隙。

圖7 EMB間隙調控流程圖Fig.7 EMB gap regulation flow chart
4.1 接觸臨界點的識別
在制動間隙消除階段,由于電機負載較小,電機在PID控制系統作用下快速旋轉,電機會在短時間內達到最大轉速,快速進行制動間隙消除以減小行車制動距離,提高行車安全。當制動摩擦片與制動盤恰好接觸到達接觸臨界點,即完成制動間隙消除。由于此時電機負載突然增大,電機轉速會快速減小。因此可以根據電機轉速驟減的起始點判斷制動間隙是否消除完畢。
為保證仿真的可靠性,首先驗證PID三閉環控制的可靠性。針對壓力環輸入目標夾緊力2.5 kN,控制結果如圖8所示。針對轉速環,輸入目標轉速2 250 r/min,跟隨結果如圖9所示。對于電流環,輸入目標電流22.4 A控制結果如圖10所示。經分析,滿足PID控制設計要求。
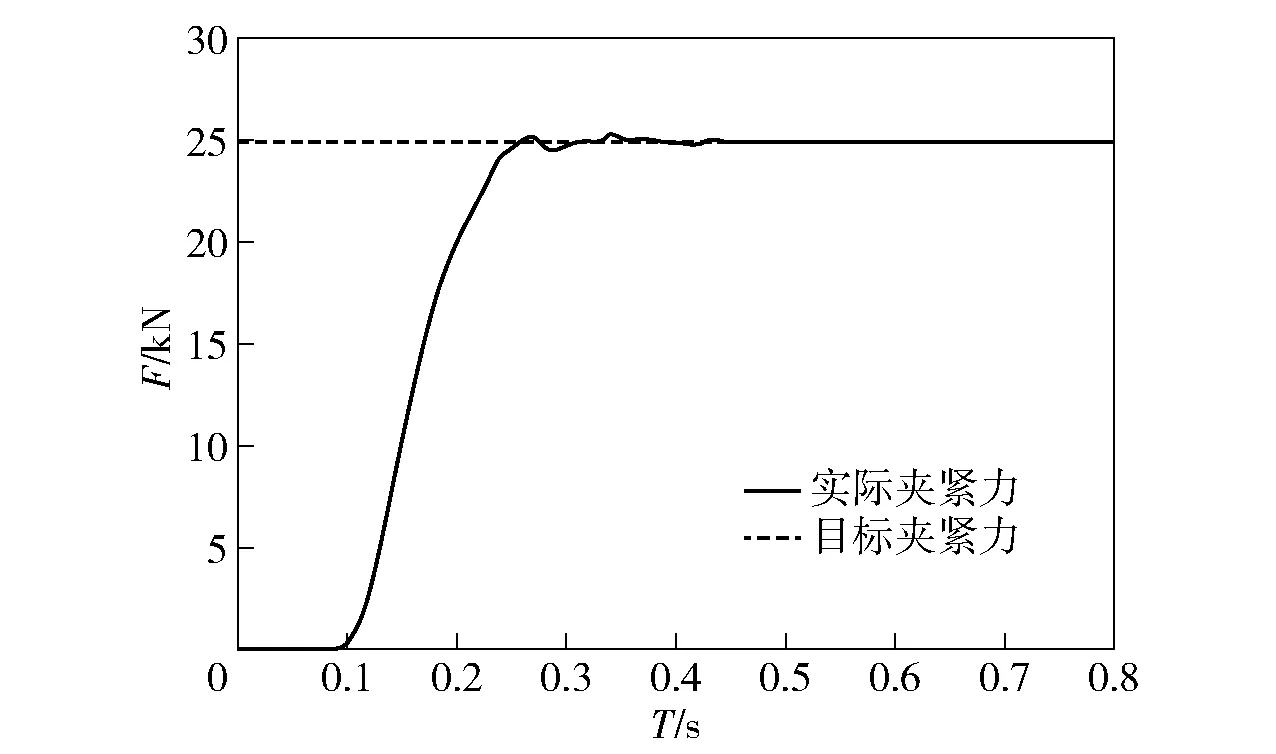
圖8 壓力環的控制結果Fig.8 Pressure loop control results

圖9 轉速環的跟隨結果Fig.9 Speed loop tracking results

圖10 電流環的控制結果Fig.10 Current loop control results
根據仿真結果圖11知:在PID控制系統作用下,電機啟動后經過0.033 s達到最高轉速,滿足電機啟動快的要求;電機達到最高轉速時,夾緊力為0 N,表明制動間隙并未完全消除;電機以最高轉速快速旋轉,在0.08 s時電機轉速開始減小,即達到電機轉速驟減的起始點,此時夾緊力開始增大,表明0.08 s完成了制動間隙的消除;之后進入制動力跟隨階段,在制動力跟隨階段;隨著制動摩擦片形變量的增大夾緊力不斷增大,在0.38 s時,達到最大夾緊力,此時電機轉速恰好為0 r/min。

圖11 PID作用下的夾緊力- 轉速曲線圖Fig.11 Clamping force-speed curve under PID
圖12所示為無PID作用下的夾緊力- 轉速曲線圖。根據圖12可知,無PID控制系統作用下,直接給電機輸入一定的電壓(=27.5 V),電機啟動后經過0.035 s達到最高轉速;在0.12 s時達到制動間隙消除時的接觸臨界點;在0.52 s時,達到最大夾緊力,此時電機轉速恰好為0 r/min。
圖12 無PID作用下的夾緊力- 轉速曲線圖Fig.12 Clamping force-speed curve without PID
根據以上分析知,有PID控制系統作用下電機達到最高轉速的時間為0.033 s,無PID控制系統作用下電機達到最高轉速的時間為0.035 s,基本無差異。但在PID控制系統下,制動間隙消除時間為0.08 s,無PID控制系統下為0.12 s,制動間隙消除時間縮短了33.3%。圖13所示為夾緊力變化曲線圖。根據圖13知,在PID控制系統下制動器達到最大夾緊力的時間為0.38 s,無PID控制系統下為0.52 s,電機響應時間縮短26.9%。

圖13 夾緊力變化曲線圖Fig.13 Clamping force curve
4.2 分離臨界點的識別
當駕駛員完成制動目的后,再給力矩電機施加等值的反向電壓,電機經過減速機構、運動轉換機構帶動制動塊逐漸釋放制動盤。制動塊在逐漸釋放制動盤時,電機轉速會逐漸增大。根據(1)式~(2)式知,隨著電機轉速的增大電流會逐漸減小。電機達到最高轉速時,電流也減小到一個穩定值。因此可以利用電機電流對時間的微分如(13)式識別制動塊與制動盤的分離臨界點。但由于行車的實際工作條件較為復雜及一些未知因素的影響,可能出現電流在未達到分離臨界點其對時間的微分依然為0的情況。為了解決這個問題,提出了設置電流上下限閾值的方法來消除這種影響。
(13)
≤≤
(14)
式中:為電流下限閾值;為電流上限閾值。
在制動間隙產生階段,設置夾緊力初始值為制動力跟隨階段最大值,給電機加上反向電壓。對比圖14和圖15可知,在PID控制系統作用下,電流經過短暫0.03 s啟動后,電流的斜率由正值變為負值。隨著制動塊逐漸釋放制動盤,電流的斜率不斷由負值靠近0,在0.18 s時電流的斜率恰好為零,制動夾緊力也恰好由最大值逐漸減小到0,電流值為1.1 A。因此在0.18 s時,制動摩擦片與制動盤達到了分離臨界點即制動間隙開始產生時的臨界點。由圖15可知,電流在峰值附近存在斜率為零的點,并且EMB的實際工作條件較復雜,電流在其他位置也可能產生斜率為0的點。為解決此問題,根據多次仿真結果驗證,當達到制動間隙開始產生時的臨界點時,電流基本穩定在1.4 A。設置為1.2 A,為1.6 A,把電流上下限閾值之外對時間微分為零的點剔除,顯然電流峰值不在電流上下限閾值之內,提高了識別精度。無PID控制系統作用下,電流經過短暫0.033 s啟動后,電流的斜率由正值變為負值。在0.22 s時達到制動間隙開始產生時的臨界點。

圖14 分離過程夾緊力變化曲線圖Fig.14 Clamping force curve during the separation process
圖15 分離過程電流變化曲線圖Fig.15 Current curve during the separation process
根據以上分析結果知,在PID控制系統下,達到制動塊與制動盤分離臨界點的時間為0.18 s,無PID控制系統下為0.22 s,制動間隙產生時間縮短了18.1%。
5 實驗驗證與分析
為驗證所設計電子機械系統及間隙調控策略工作的可靠性,在實驗室搭建了如圖16所示的試驗平臺。實驗采用壓力傳感器檢測制動夾緊力信號,采用電流傳感器檢測電機電流信號,采用轉速傳感器測量轉速信號。將各個傳感器檢測的信號經過A/D轉換傳遞給數據采集模塊,數據采集模塊再將數字信號傳遞給上位機,上位機進行分析判斷并發出控制指令。其中EMB的主要結構參數如表1所示。

圖16 試驗平臺結構圖Fig.16 Test platform

表1 EMB的主要結構參數
由實驗結果圖17和圖18知:目標夾緊力為最大夾緊力25 kN時,在PID控制系統作用下,電機在0.04 s時達到最高轉速。然后電機以最高轉速快速進行制動間隙消除,在0.092 s時電機轉速開始減小,即達到電機轉速驟減的起始點,此時夾緊力開始增大,說明0.092 s完成了制動間隙的消除即為制動塊與制動盤接觸臨界點。之后進入制動力跟隨階段,在制動力跟隨階段隨著制動摩擦片形變量的增大夾緊力不斷增大,在0.40 s時,達到最大夾緊力,此時電機轉速恰好為0。無PID控制系統作用下,電機在0.042 s時達到最高轉速,在0.13 s時完成制動間隙消除,在0.50 s時達到最大夾緊力25 kN。
圖17 不同工況下夾緊力變化曲線圖Fig.17 Clamping force curves under different conditions
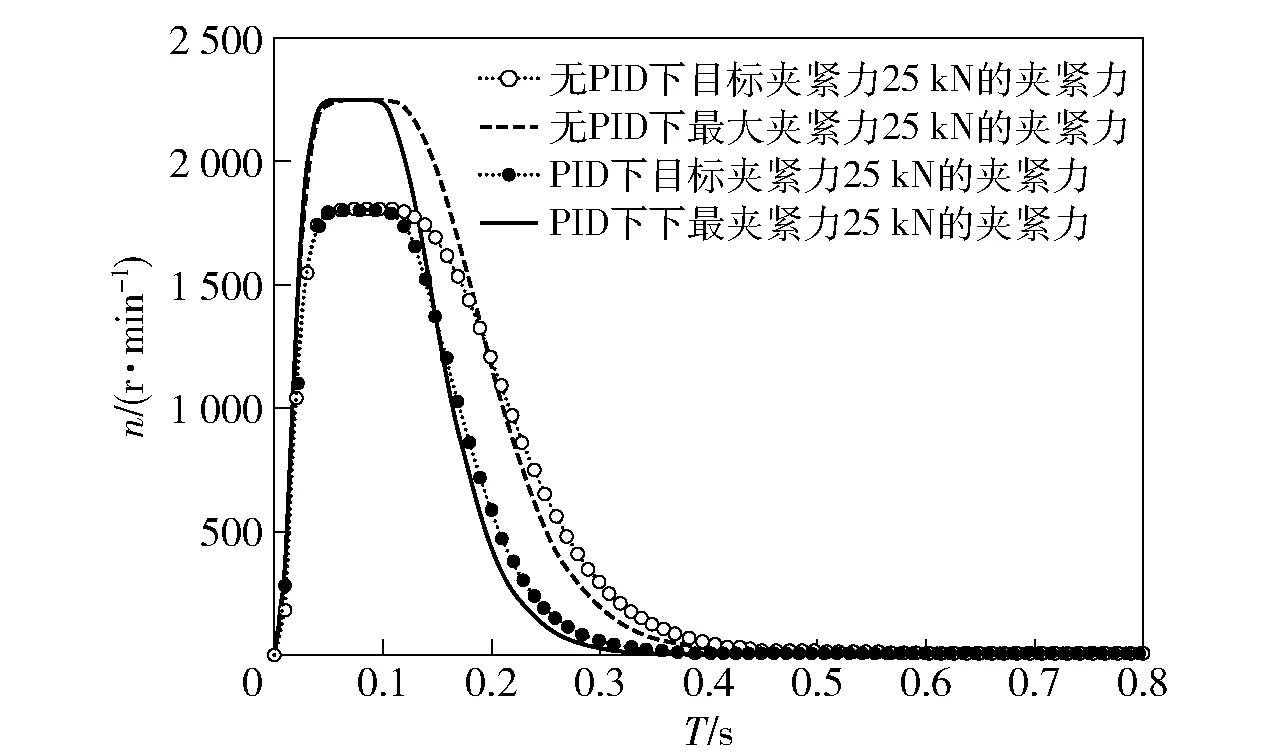
圖18 不同工況下轉速變化曲線圖Fig.18 Rotational speed curves under different conditions
目標夾緊力為20 kN時,在PID控制系統作用下,電機在0.043 s時達到最高轉速。然后電機以最高轉速快速進行制動間隙消除,在0.096 s時電機轉速開始減小,即達到電機轉速驟減的起始點,此時夾緊力開始增大,說明0.096 s完成了制動間隙的消除即為制動塊與制動盤接觸臨界點。之后進入制動力跟隨階段,在制動力跟隨階段隨著制動摩擦片形變量的增大夾緊力不斷增大,在0.42 s時,達到目標夾緊力,此時電機轉速恰好為0 r/min。無PID控制系統作用下,電機在0.044 s時達到最高轉速,在0.134 s時完成制動間隙消除,在0.52 s時達到目標夾緊力20 kN。
由以上分析知,目標夾緊力為25 kN時,有PID控制系統作用下電機達到最高轉速的時間為0.040 s,無PID控制系統作用下電機達到最高轉速的時間為0.042 s,基本無差異。但在PID控制系統下,制動間隙消除時間為0.092 s,無PID控制系統下為0.13 s,制動間隙消除時間縮短了29.2%。在PID控制系統下制動器達到最大夾緊力的時間為0.40 s,無PID控制系統下為0.50 s,響應時間縮短20%。當目標夾緊力為20 kN時,有PID控制系統與無PID控制系統作用下電機達到最高轉速的時間基本相等。但在PID控制系統下,制動間隙消除時間為0.096 s,無PID控制系統下為0.134 s,制動間隙消除時間縮短了28.4%。在PID控制系統下制動器達到最大夾緊力的時間為0.42 s,無PID控制系統下為0.52 s,響應時間縮短20%。
6 結論
本文給出了EMB的設計方法與設計流程,確定了各組成部分的型號與相關參數,并整定PID控制系統各控制環的相關系數。提出了一種在PID控制系統下,利用電機轉速與電流信號特征分別識別制動間隙消除時的接觸臨界點與制動間隙開始產生時的臨界點的間隙調控方法。通過設置電流上下限閾值約束條件提高識別精度。得出主要結論如下:
1)在PID控制系統下,該策略能夠很好的識別制動間隙消除時的接觸臨界點與制動間隙開始產生時的臨界點。與無PID控制系統仿真結果相比,制動間隙消除時間縮短了33.3%,達到最大夾緊力的電機響應時間縮短了26.9%。
2)由實驗結果知:當目標夾緊力為最大夾緊力25 kN時,在PID控制系統下制動間隙消除時間與無PID控制系統時相比縮短了29.2%,達到最大夾緊力的響應時間縮短20%。當目標夾緊力為20 kN時,在PID控制系統下制動間隙消除時間與無PID控制系統時相比縮短了28.4%,達到目標緊力的響應時間縮短20%。
[1] 張軍和. 汽車線控制動技術及發展趨勢探析[J]. 時代汽車,2021(7):24-25.
ZHANG J H. An analysis of automobile braking technology and its development trend[J]. Auto Time, 2021(7): 24-25. (in Chinese)
[2] LIU Y,SUN Z,JI W. Development of composite brake pedal stroke simulator for electric hydraulic braking system[J]. SAE Technical Paper, 2014-01-0117.
[3] 昌慶鈴. 汽車液壓制動器現代設計方法研究[D]. 南京:南京理工大學,2002.
CHANG Q L. Research on modern design method of automobile hydraulic brake[D]. Nanjing: Nanjing University of Science and Technology, 2002. (in Chinese)
[4] 羅茂元.基于汽車電子機械式制動系統的主動安全設計[D]. 成都: 電子科技大學, 2016.
LUO M Y. Active safety design based on automotive electromechanical braking system[D]. Chengdu: University of Electronic Science and Technology of China, 2016. (in Chinese)
[5] 楊坤.輕型汽車電子機械制動及穩定性控制系統研究[D].長春: 吉林大學, 2009.
YANG K. Research on the electronic mechanical braking and stability control system of light-duty vehicles[D]. Changchun:Jilin University, 2009. (in Chinese)
[6] GUAN D,YANG X H,LIU G,et al. The study of electromechanical brake device based on the ball screw[J]. Applied Mechanics and Materials, 2012, 155-156:509-513.
[7] 盧甲華.汽車EMB系統性能分析與優化[D]. 重慶: 重慶大學,2015.
LU J H. Performance analysis and optimization of automobile EMB system[D]. Chongqing: Chongqing University, 2015.(in Chinese)
[8] 申伶.電控機械式制動器(EMB)機械系統研究[D]. 西安:長安大學,2017.
SHEN L. Research on mechanical system of electromechanical brake (EMB)[D]. Xi’an: Chang’an University,2017. (in Chinese)
[9] 葛正,王維銳,王俊鼎.電子機械制動器間隙調整控制策略研究[J]. 浙江大學學報(工學版), 2017, 51(1): 138-144.
GE Z, WANG W R, WANG J D. Research on the control strategy of electronic mechanical brake clearance adjustment[J]. Journal of Zhejiang University (Engineering Science Edition), 2017, 51(1): 138-144. (in Chinese)
[10] 劉玲玲. PID參數整定技術的研究及應用[D]. 鄭州:鄭州大學, 2010.
LIU L L. Research and application of PID parameter tuning technology[D]. Zhengzhou: Zhengzhou University, 2010. (in Chinese)
[11] 俞建榮,張業帥,馬麗梅,等. 新型雙圈無刷直流電機智能PID控制[J]. 航天控制, 2021, 39(1): 26-31.
YU J R,ZHANG Y S,MA L M,et al. Intelligent PID control of a new type of double-loop brushless DC motor[J]. Aerospace Control, 2021, 39(1): 26-31. (in Chinese)
[12] 王婷婷,王宏志,劉清雪,等. 遺傳算法優化的無刷直流電機模糊PID控制器設計[J]. 吉林大學學報(理學版),2020, 58(6): 1421-1428.
WANG T T,WANG H Z,LIU Q X,et al. Design of fuzzy PID controller for brushless DC motor optimized by genetic algorithm[J]. Journal of Jilin University (Science Edition), 2020, 58(6): 1421-1428. (in Chinese)
[13] LI Y, SHIM T, SHIN D H, et al. Control system design for electromechanical brake system using novel clamping force model and estimator[J]. IEEE Transactions on Vehicular Technology, 2021, 70(9): 8653-8668.
[14] RICHTER W,BUELTE C. Method for tightening an electromechanical brake,and electromechanical brake: US20140222307[P].2014.
[15] KIM J S. Apparatus and method for initializing of electromechanical brake: U.S. Patent 9, 346, 446[P]. 2016-05-24.
[16] 陳晉市,劉思遠,王同建,等. 8×8全電驅動越野車電機液壓聯合全液壓制動系統設計及性能[J]. 兵工學報, 2021, 42(2): 422-429.
CHEN J S, LIU S Y, WANG T J, et al. Design and performance of the motor-hydraulic combined full-hydraulic braking system of an 8×8 all-electric off-road vehicle[J]. Acta Armarmentarii, 2021, 42(2): 422-429. (in Chinese)
[17] FU Y F, HU X H, WANG W R, et al. Simulation and experimental study of a new electromechanical brake with automatic wear adjustment function[J]. International Journal of Automotive Technology, 2020, 21(1):227-238.
[18] 張建. 電子機械制動執行器精細控制算法研究[D]. 長春: 吉林大學, 2011.
ZHANG J. Research on fine control algorithm of electromechanical brake actuator[D]. Changchun: Jilin University, 2011.(in Chinese)
[19] 傅云峰,王維銳,葛正. 新型汽車電子機械制動系統建模仿真與實驗研究[J].工程設計學報,2017,24(6):702-709.
FU Y F,WANG W R,GE Z. Modeling simulation and experimental research on new automobile electromechanical braking system[J]. Journal of Engineering Design, 2017, 24(6):702-709.(in Chinese)
[20] 李燦華. 基于EMB的汽車制動控制研究[D]. 重慶: 重慶大學, 2015.
LI C H. Research on automobile braking control based on EMB[D]. Chongqing: Chongqing University, 2015. (in Chinese)
[21] JO C,HWANG S,KIM H. Clamping-force control for electromechanical brake[J]. IEEE Transactions on Vehicular Technology, 2010, 59(7): 3205-3212.
[22] 張瀟.汽車電子機械制動系統及硬件在環試驗臺研究[D].成都: 西華大學, 2018.
ZHANG X. Research on automotive electronic mechanical brake system and hardware-in-the-loop test bed[D].Chengdu: Xihua University, 2018.(in Chinese)
[23] PARK G. Development of clamping force estimation algorithm and clamp-force sensor calibration on electromechanical brake systems[J]. Transaction of the Korean Society of Automotive Engineers, 2016, 24(3): 365-371.
[24] 郭弘明,席軍強,陳慧巖,等. 電驅動無人履帶車輛線控機電聯合制動技術研究[J].兵工學報,2019,40(6):1130-1136.
GUO H M,XI J Q,CHEN H Y,et al. Research on the combined braking technology of electric drive unmanned tracked vehicle by wire-controlled electromechanical[J]. Acta Armarmentarii, 2019, 40(6): 1130-1136. (in Chinese)