未來戰場無人機蜂群作戰能力分析*
2022-08-02 02:12:22蘇雯嘉高欣寶
艦船電子工程 2022年6期
蘇雯嘉 方 丹 高欣寶
(陸軍工程大學石家莊校區 石家莊 050003)
1 引言
2019年9月,10架無人機組成的作戰力量被胡塞武裝投入到襲擊沙特的兩處煉油廠,造成巨大損失,這是典型的以較小代價換取較大作戰效果的例子[1],該戰例開啟了無人機蜂群作戰的時代。回顧無人機的發展歷史,在需求牽引、技術支持等因素的影響下,無人機經歷了從無到有,再到完善優化的發展歷程。1914 年,一戰期間,英國的兩位將軍卡德爾和皮切爾首次提出“無人駕駛空中炸彈”的概念。1917 年,第一臺自動陀螺穩定儀的出現,對于飛機自動旋轉穩定的研究形成突破。1935 年,“蜂后”式無人機問世,隨后,各國都陸續出現了自己的無人機。1966年12月,中國第一架無人機“長空一號”首飛成功。最初,人們研制出無人機只是為了減輕飛行員的負擔,讓其可以代替人類去完成危險、復雜、骯臟的任務,而無人機也憑借其部署靈活多變、使用成本低、響應速度快等優勢在軍民領域得到迅速發展[2]。美軍作為世界軍事強國,在無人機的研發方面,運用了飛行動力學技術、集成化技術、自動控制技術等方面,引領了無人機研制技術的不斷優化,并且長期以來一直將無人機空域作戰作為其占據軍事優勢的重要手段之一[3],圖1 展示了美軍無人機發展。
美軍近年來提出了“小精靈項目”、“山鶉項目”等一系列研發論證無人機集群作戰的項目,使得無人機蜂群成為各國重點關注的作戰樣式,2019 年時任美空軍助理部長的威爾·羅珀在《空軍》中就曾提出:“未來戰爭的作戰樣式就是蜂群作戰”[4]。無人機蜂群作戰的特點是,模擬蜂群分工、傳遞信息、協同配合的過程,攜帶不同類型、數量的彈藥,結合作戰任務的多少、作戰區域的分布、無人機數量的分配、無人機飛行軌跡的規劃等情況,預先做出決策,圖2是一個無人機蜂群作戰概念示意圖。
無人機蜂群的出現改變了現有戰場環境,使得戰場態勢變化的速度加快,未來戰場環境的改變又對無人機蜂群提出了更高的要求。本文主要結合美軍的無人機蜂群發展分析了未來戰場的改變和無人機蜂群的關系,以及未來戰場對無人機蜂群作戰所提出的要求。
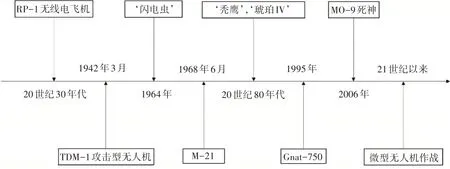
圖1 美軍無人機發展

圖2 無人機蜂群作戰示意圖
2 未來戰場環境與無人機蜂群作戰的關系
無人機蜂群改變了戰場環境,戰場環境也影響著無人機蜂群作戰,本節將先從無人機蜂群對未來戰場變化的影響,再分析未來戰場上的作戰方式對無人機蜂群發展方向的影響和關鍵技術對無人機蜂群作戰性能的影響三方面來展開分析未來戰場環境與無人機蜂群作戰的關系。
2.1 無人機蜂群對未來戰場的影響
隨著無人作戰概念逐漸演化,人工智能不斷突破,無人武器逐漸成為各國重點發展的武器,其中無人機是目前研發力量最為龐大、使用場景最為全面、利用率最高的無人武器,而隨著通信傳輸力量日益強大,無線通信距離取得突破,無人機蜂群作為新興武器開始走進人們視野。美國防部早在20世紀90 年代末就提出了無人機蜂群作戰概念,并且先后展開了多個項目對其進行論證研究。此外,美空軍在2016 年5 月發布的《2016-2036 年小型無人機系統飛行規劃》中也提到了無人機蜂群作戰概念:低對抗環境下,C-130 運輸機投送無人機蜂群,執行情報偵察、監視任務,并且配合中空長航時無人機實施打擊和為AC-130 空中炮艇提供目標指示;在強對抗環境下,改由B-2 隱身轟炸機投送無人機蜂群,同時增設對空∕對地電子攻擊、壓制∕摧毀敵方防空火力等功能。可見,未來戰場上,無人機蜂群必將成為重要武器。
無人機蜂群作戰的對象一般是坦克和裝甲等重型武器,依靠無人機蜂群的小而多、可靈活重組的特點來應對重型武器的大而笨、難以高速移動的特點,使用集群協同打擊的方式進行作戰,對于敵方攻擊在很短時間內變換隊形,令敵方難以應對,無人機蜂群的作戰規模不是絕對的,會隨著當前打擊目標的難易程度和無人機的戰損情況而具體確定,作戰能力取決于當前無人機的數量和所具備的功能,這就使得未來作戰環境變成攻擊無處不在、目標無處隱形、敵人無處藏身的戰場,而又因為反無人機蜂群技術的發展不完全,目標探測技術、電磁干擾技術、精確打擊技術難以應對數量龐大的無人機蜂群,未來戰場又將具有目標難以發現完全、敵人難以消滅殆盡、武器難以利用到位的特點。
2.2 未來作戰方式對無人機蜂群發展方向的影響
未來作戰方式是無人作戰,無人機蜂群是與無人作戰相對應的重要武器之一,除美國外,世界各國都針對無人機蜂群技術展開了研究。以色列于2021 年5 月首次使用無人機蜂群對哈馬斯組織發動空襲和到導彈打擊,數十個哈馬斯目標被摧毀而以色列無一人傷亡;我國中電科集團于2020 年10月開展了由200 架無人機組成的無人機蜂群系統試飛的工作,驗證了陸上發射和空中投放無人機蜂群完成對地察打、精確打擊等各項任務的能力;近期我國國防科技大學智能科學院自主研發的固定翼∕復合翼異構無人蜂群,于2021 年8 月在“西部-聯和-2021”演習中首次亮相并取得圓滿成功。
從表1 中美軍典型無人機項目情況分析一覽表中關鍵特點一欄中可看出,美軍作為軍事領頭,重點關注的是發展無人機蜂群的低成本和智能化。無人機蜂群可以大幅降低作戰成本,對一個航母戰斗群發動一次飽和攻擊需要240 枚反艦導彈,若無人機蜂群戰術發展成熟,將其換成美軍目前用于模擬作戰的“郊狼”無人機,單價僅為15000 美元,240架無人機的總成本也不過360萬美元,僅僅相當于三門“魚叉”導彈的成本[5],可見,無人機蜂群的低成本特性極為顯著,可以大幅減少武器研發開支。無人機蜂群的作戰構想就是讓無人機像蜜蜂一樣,對目標群起攻之,獨立自主完成機群信息共享和協同進攻防御等任務,成為能夠“思考”的武器,這就要求無人機在未來戰場上變得更加智能化,能夠自主控制、靈活機動,必要時還需要能夠做出自殺式攻擊的決定。只有具備低成本和智能化,才有可能從未來戰場上的一系列無人作戰武器中脫穎而出。

表1 美軍典型無人機項目情況分析一覽表
2.3 關鍵技術對無人機蜂群作戰性能的影響
無人蜂群首先強調的是無人化,2016 年3 月AlphaGo 擊敗世界圍棋冠軍就證明人工智能可以戰勝人類,因此也可以替代人類進行決策,其次強調的就是集群化,假設有20 架小型無人機進行作戰,區別于單個無人機作戰,這20 架無人機要先分組,比如5 架首先進行戰場偵察,偵察結束之后遠程返回目標信息并且作為后備力量繼續在戰場中補給其他分組,3 架打擊地面坦克,5 架打擊地面雷達車,3 架打擊地面作戰人員,4 架打擊地面防御工事,每個組里面的無人機要進行目標打擊情況的信息交流,組與組之間也需要進行一定的交流,以便于進行支援與協助,這其中,每一步都需要無人機可以自主判斷當前態勢,并根據動作優劣程度做出當前最適宜的決策。
無人機蜂群會結合以往的作戰關鍵技術和最新的關鍵技術一起發展,彈藥制導與控制技術、目標探測與識別技術、光電傳導技術等傳統技術已經發展比較成熟,無人機蜂群的“眼”“耳”“鼻”“嘴”“手”“腳”已經形成雛形,但是作為最復雜精妙的“腦”卻處于剛剛萌芽的狀態,這就是現在最熱門的人工智能技術。將人工智能技術應用到無人機蜂群中,最初的作戰想定才能實現,可以說,人工智能技術推動著無人機蜂群的成熟。無人機蜂群作戰本質上就是“無人軍”作戰,人工智能技術是“無人軍”打敗有人軍的關鍵。
3 無人機蜂群作戰能力
無人機蜂群憑借小型化、低成本、集群作戰和重組靈活的特點區別于傳統的智能武器,圖3 是無人機蜂群作戰演示圖。2004 年,美國海軍陸戰隊首次提出“分布式作戰”概念,來適應當前武器裝備“大量、小型、多樣”的特點,到2014 年,美國出臺的第三次“抵消戰略”中就進一步明確了分布式空中作戰的概念[6]。分布式作戰,是指蜂群中每一架無人機都是一個獨立而又和其他無人機有聯系的個體,每一架無人機都具備在戰場上自主生存的能力,并且可以與其他無人機共同組網實現信息互通,分布式作戰的無人機蜂群沒有中心無人機,任何一架被毀傷都不會對其他無人機造成影響,剩余的無人機可以繼續重組網協同作戰。無人機蜂群作戰能力,既包含了無人機的的自主生存能力,又囊括了蜂群協同作戰方法。

圖3 無人機蜂群作戰演示圖
3.1 無人機蜂群自主生存能力
無人機蜂群中的每一架無人機都是一個節點,關系著蜂群通信和蜂群網絡的構建,要想無人機蜂群能夠在戰場環境下良好地生存下來,不僅需要單個無人機的功能正常運行,還需要保證蜂群組網的正常通信。在沒有敵方威脅的情況下,對于單個無人機而言,在完成一定高度、一定時長的飛行任務時,需要有航時長、穩定好和定位準的能力;對于蜂群系統而言,最主要的是要有交流順和轉軌快的能力。
1)航時長
無人機蜂群作戰空間較大,被投放后很容易出現距離預定作戰位置很遠的情況,而且在戰場中作戰的時間并不是固定的,這就需要無人機能夠長時間航行,具有充足的作戰時間來完成作戰任務。
無人機要想航行時間長,就必須保證有充足的動力,無人機的動力系統包括電動機和內燃機兩種,以電動機為主,目前無人機的動力裝置普遍采用活塞式發動機系統,但是對于無人機蜂群中的微型無人機而言,體積更小、重量更輕的電動動力系統更為合適。無人機蜂群作戰講究的是快速高效,以量取勝,所以,對于無人機的續航時間要求并沒有大型無人機那么高,通常保持在兩小時,單純采用鋰電池供電能量供應有限,單純采用燃油供電又影響速度,目前針對該問題的解決方法一般都是實現油動和電動混合,其中宗劍等提出一種油電混合式動力系統[7],結合兩種供電方式的優點來給無人機提供充足的動力,并且,為了減輕無人機負擔,燃油可以換為固體高密度機油,在無人機工作前期使用電力系統供電,電力消耗到一定程度后開始進行固體機油的融化使用,這樣既保證了動力的充足,又可以提高能源利用率。
2)穩定好
無人機進行空域作戰,自身體積較小,不僅風向、風速、天氣狀況會對無人機飛行產生影響,自身轉彎、加減速、起飛、降落等需要改變無人機姿態的過程也會導致無人機發生偏轉、墜毀等情況,所以,空中飛行的不確定性使得無人機必須具有良好的穩定性。
無人機要想獲得穩定的飛行姿態,一定要控制飛行的角度和速度,以往一般采用加速度計和陀螺儀來進行無人機飛行姿態解算得到無人機飛行的速度和角度的信息,但是這兩種方法的誤差較大,基于此,潘亞文等融合兩者優點提出了一種四元素互補濾波混合算法[8],唐俊等則為提高精度提出了一種動態梯度補償的算法對加速度計和陀螺儀輸出的數據進行實時處理[9],Lara Alabazares 等研制了一種小型無人機姿態穩定魯棒控制器[10]。無人機飛行姿態控制的研究目前取得了一部分成果,但是仍舊需要為進一步提高控制精度,縮短控制時間而不斷努力。
3)定位準
無人機蜂群在完成任一任務前,都需要進行航跡規劃,碰到來襲炮彈等突發情況,還需要快速改變原有軌跡,無人機蜂群進行軌跡規劃需要準確掌握每一架無人機當前位置,根據無人機的速度和轉角范圍測算最適宜的路徑到達目標位置,這樣,既能提高作戰效率,又能避免無人機之間發生碰撞。
通常,無人機地定位分為兩種,自主定位和被動定位,自主定位是自己實現定位,不借助外界配合,主要是慣導和陀螺儀,被動定位就是GPS、北斗和格拉斯。無人機蜂群不僅要定位準,還得能夠和戰場進行信息交互,得到敵方目標和己方無人機的位置,所以一般采用被動定位,使戰場上所有作戰力量在相同的坐標系下,無需進行坐標轉換。被動定位是利用24顆GPS衛星或者55顆北斗衛星來確定無人機的位置,隨著科技的不斷進步,據悉,美國GPS 民用定位精度提高到了10m 左右,而軍用GPS的定位精度約為0.4m,俄羅斯的格拉斯定位精度稍遜于美國,約為10m,我國的北斗衛星定位系統雖然起步較晚,定位精度均值卻已達到2.34m,未來北斗還將與5G 網絡結合使用,做到定位速度更快,定位精度更高,覆蓋面更廣,應用更多[11]。
4)交流順
隨著信息技術的發展,遠距離通信已不成問題,但是由于無人機的數量眾多,通信信息的大量發射和接收使得戰場電磁環境變得愈加復雜,如何保證無人機之間的順暢交流成為一個關鍵問題。
傳統的射頻通信因為易被戰場環境磁場干擾,針對此問題,于志亮等提出了自由空間光(FSO)通信[12],FSO 通信的帶寬更大、不易受干擾,更適合無人機蜂群的機間通信。而針對無人機的無線通信頻段與其他用戶共享,造成擁擠的問題,Touati等提出了一種基于集中式認知無線電網絡的無人機通信方式,地面控制站作為中央協調器處理無人機群帶寬使用,有效解決無人機通信擁堵問題[13]。目前針對無人機蜂群的通信問題提出的很多方法都沒有投入實戰中驗證,無人機蜂群的通信問題是未來作戰急需解決的問題之一。
5)轉軌快
無人機蜂群的軌跡并不是一直不變的,會根據戰場情況隨時進行調整,比如無人機蜂群被擊落或者通信遭遇阻斷時,會需要快速改變原有軌跡,而要想實現達到快速的目的,就需要無人機的大腦——飛控系統,能夠正常工作。飛控是用來接收指令并解算成無人機參數來控制無人機的飛行速度、傾角等因素的,其解算發送信息的能力是通過改進其算法而實現的,目前其算法已經能夠大幅縮短解算時間,所以只需要避免其在戰場環境中受到電磁干擾無法工作問題的出現。對于傳輸的信息,吳佳楠等介紹了構成可重構系統以及余度技術兩種方法[14],同時,對于飛控系統的保護還需要考慮部件布置和屏蔽。
3.2 無人機蜂群協同作戰能力
無人機蜂群的協同作戰能力,主要體現在任務的完成度以及對自身的保護上。
無人機發展到無人機蜂群,作戰任務不再是簡單的察打一體,集群作戰中,每一架無人機的功能都變得更加多樣化,執行的任務也變得更加復雜。信息化作戰背景下,無人機蜂群的集中式控制決策和半集中式控制決策不再適用,針對每一架無人機的不同功能,采用分布式控制決策才能夠最大化發揮蜂群效能,提高任務完成度。為了能夠更好地完成任務,針對無人機蜂群的協同作戰決策以及任務分配方面,Kai Virtanen 等提出一種影響圖博弈的方法對空戰中的每一步動作進行決策[15];楊利斌等提出基于遺傳算法的分布式柵格計算方法來提高多無人機協同決策的計算效率[16];彭維平等提出采用多無人機直播體育賽事的方法來解決無人機執行任務過程中計算量大和能耗高的問題[17];左家亮等則采用最新的啟發式強化學習理論來計算無人機空戰機動決策序列[18];吳傲等采用一種以信息素為決策機制的方法來進行無人機蜂群協同搜索作戰[19]。針對提高加強無人機蜂群協同作戰能力的研究又很多,大多都是以算法為基礎來進行研究,這樣就更加需要主義提高無人機蜂群的計算和響應速度問題。
在現代空域作戰過程中,隨著電磁波的廣泛應用,無人機蜂群對自身的保護主要體現在電磁防護上,只要無人機蜂群在投入作戰前系統設定良好,基本不會出現撞擊障礙物被毀傷的情況。無人機蜂群在空戰過程中,會被敵方反無人機槍打擊,一旦被擊中,無人機就會緩緩落地,因為失聯而迫降。為此,無人機既需要對干擾信號進行有效的濾除,又需要及時防護電子設備被強電磁干擾損壞,王永勝等人在光電系統、天線端口以及機體設計三方面給出了防護思路,為無人機的自身保護提出有效建議[12];張冬曉等提出了一種基于環境感知的數據鏈干擾自適應方法,來提高無人機的主動抗擾能力[20];趙敏等則提出一種基于前門耦合的電磁敏感度注入效應實驗方法,來研究數據鏈電磁干擾機理從而提出防護方法。電磁環境日漸復雜,針對電磁武器的研究層出不窮,電磁防護也不容忽視,無人機蜂群可以向著模塊化方向發展,針對不同方面做出不同模塊來應對復雜多變的戰場環境,再根據不同的需求裝備不同的模塊,提高無人機的自主作戰能力。
4 結語
無人機蜂群是目前急速發展的智能武器之一,國內外都予以高度重視,本文先根據無人機蜂群的發展史,重點介紹了美軍的情況,明確無人機蜂群是未來作戰的主要武器。接著分析了無人機蜂群對未來戰場的影響、未來作戰方式對無人機蜂群作戰性能的影響和關鍵技術對無人機蜂群的影響,無人機群蜂群改變著未來戰場環境,未來戰場也在促進無人機蜂群的發展,最后從自主生存和協同作戰兩方面分析了無人機蜂群的作戰能力,并且指明了無人機蜂群現在仍舊存在的問題和將來的發展方向。
