航母編隊作戰(zhàn)中預警機陣位配置研究*
2022-08-02 02:12:44張財生臘笑璞
艦船電子工程 2022年6期
關鍵詞:飛機
張財生 臘笑璞
(1.海軍航空大學209教研室 煙臺 264001)(2.中國人民解放軍91856部隊 上海 201900)
1 引言
航母編隊作戰(zhàn)中,加強對空防御以保證航母的安全是航母編隊重點考慮的問題之一。預警機可以在較遠的距離發(fā)現(xiàn)對方飛機或?qū)棧⒓皶r向指揮所報告,根據(jù)指揮員的命令指揮引導戰(zhàn)斗機實施積極的攔截。艦載預警機的陣位配置,一定程度上決定了航母編隊的防空預警效能[1~3]。本文結(jié)合美艦載預警機的典型作戰(zhàn)樣式,對其預警機的陣位配置進行了研究,分析了其預警探測和活動方法的基本要求,然后提出了預警機陣位配置的方法,構建了預警機陣位配置模型,給出了預警機在對海作戰(zhàn)中的陣位配置和對空防御中的空域配置,并仿真分析了預警機的前出距離和巡航方位角間的約束關系。
2 航母編隊防空預警體系
2.1 航母編隊防空區(qū)域劃分
美航母編隊的防空力量主要由航空兵和水面艦艇組成。航母編隊的對空防御,主要防御對方航空兵和導彈的空襲。因此,航母編隊的對空防御采取艦空一體、遠近搭配和軟硬并舉的方式,構建以航母為中心的全面、立體、多維的環(huán)形編隊對空防御體系[4]。為確保體系的有效性,便于組織指揮和協(xié)同,便于充分發(fā)揮各種防御兵力、兵器的效能。美航母編隊防空預警體系如圖1 所示,通常將編隊防空區(qū)域劃分為遠程、中程和近程。
遠程防空作戰(zhàn)主要由艦載預警機[5]和多用途戰(zhàn)斗機來實施,主要任務是探測、發(fā)現(xiàn)對方來襲的飛機、導彈,及時向航母編隊報警,并實施攔截。遠程防空區(qū)域的大小,主要取決于艦載預警機的預警探測效能和戰(zhàn)斗機部署位置。
中程防空作戰(zhàn)[6]主要由水面艦艇來實施。艦艇目標較大容易暴露且艦載雷達對于低空、高速目標探測效果不佳,所以艦艇的部署位置不能太靠前。由于艦空導彈射程小于戰(zhàn)斗機普遍使用的較遠程空艦導彈的射程,所以中程防空要求防空艦艇準確部署在對方無法避開的來襲航路上,才可能成功攔截對方飛機。
近程防空作戰(zhàn)主要由各型艦艇都裝備的電子戰(zhàn)設備、近程彈炮系統(tǒng)來實施,對突破中遠程防空的外機或反艦導彈進行近距離干擾、攔截。
2.2 預警機的作用
若對方飛機或反艦巡航導彈突破由艦載預警機和艦載戰(zhàn)斗機組成的遠程防空區(qū),那么由于水面艦艇對低空、超低空的戰(zhàn)斗機、導彈探測效果不佳,難以盡早發(fā)現(xiàn)對方低空來襲兵力,導致準備和攔截時間不足,航母編隊的安全受到威脅。由此可見,配備艦載預警機對于航母編隊來說是非常有必要的。
依靠艦載預警機的預警探測能力,可以在遠距離上探測到對方目標,然后立即報告給指揮所,根據(jù)指令指揮引導戰(zhàn)斗機實施積極的攔截、攻擊,大量殲滅對方來襲的兵力,完成作戰(zhàn)任務,保證航母編隊的安全。
圖1 美航母編隊防空預警體系示意圖
2.3 預警探測活動方法
預警機對海探測范圍需要有效覆蓋突擊目標所在的海區(qū),對空探測范圍則盡量覆蓋對方空中活動空域。對應的預警探測活動主要考慮:1)使預警機活動空域在對方雷達探測范圍之外,或者盡可能減少在對方雷達探測范圍內(nèi)的暴露時間,保持行動的隱蔽性,減少受對方空中威脅(保持隱蔽性);2)使預警機活動空域在對方岸、艦防空火力攔截范圍外,避免遭對方岸、艦火力直接殺傷,并盡可能遠離對方掩護戰(zhàn)斗機活動空域或機場;3)盡可能將預警機活動空域設在己方岸(艦)雷達對空探測范圍內(nèi)以及岸(艦)防空導彈掩護范圍內(nèi),或使預警機活動空域盡可能靠近己方岸(艦)雷達對空探測范圍以及岸(艦)空導彈掩護范圍,以便于對預警機的指揮和掩護(便于指揮和掩護);4)考慮己方突擊兵力的活動區(qū)域,便于掌握突擊兵力情況以及指揮引導;5)盡量考慮與己方其他保障兵力的協(xié)同需要。
3 空域配置
艦載預警機的活動空域設置[7],既要考慮預警機預警偵察能力的發(fā)揮,又要考慮其自身安全。因此,配置和選擇艦載預警機的活動空域時應考慮其所擔負的任務、對方主要空襲方向、航母編隊中警戒艦艇對空雷達探測范圍、航空母艦的特點及相關防空作戰(zhàn)兵力等有關情況。
以美軍為例[8~9],E-2D 從航母群出發(fā),前出進行預警偵察和指揮引導。前出距離受威脅程度、可能的威脅種類(隱形戰(zhàn)機、超音速轟炸機等)和航母群自身陣型的影響。太靠前會將航母群的后部甚至側(cè)方(以威脅軸線為前方)暴露給迂回的攻擊者,預警機自身安全也受到影響。太靠后又會減小預警探測范圍,使前出的空中巡邏戰(zhàn)機缺乏預警,進而影響戰(zhàn)斗機攔截。
此外,預警機對高速小目標探測距離近,使得前出戰(zhàn)機的預警時間進一步縮短。在整個戰(zhàn)斗群處于進攻態(tài)勢的時候,E-2D 會前出的更多。處于防守態(tài)勢時,E-2D 則會更接近戰(zhàn)斗群中心。無飛機伴隨掩護時,E-2D 靠近航母,受艦空導彈的保護,并兼顧對艦載戰(zhàn)斗機進行指揮引導和為標準6 提供支持;有戰(zhàn)斗機提供空中掩護時,艦載預警機可相對靠前部署,擴大航母編隊的防御范圍。
4 對海作戰(zhàn)中的預警機陣位
圖2 為陣位確定方法分析圖,由圖可知在確定預警機陣位[10]時,主要考慮兩方面因素。
一是預警機的任務。預警機的首要任務就是預警探測,并將實時情況傳輸給指揮所。為掌握重點海空域情況,要求預警機盡量靠近目標,并指揮引導己方兵力對目標實施突擊。
圖2 陣位確定方法分析圖
二是預警機的安全。預警機在執(zhí)行任務時,對方水面艦艇威脅不大,預警機的主要威脅是對方戰(zhàn)斗機。為完成預警探測等任務,預警機在己方戰(zhàn)斗機實施掩護的情況,可適當靠前部署;若無掩護,則預警機要靠近航母部署。
總之,艦載預警機的陣位配置是為提高編隊整體的防空預警效能服務的。
5 陣位配置方法
5.1 基本假設
定義1 威脅軸:以航母為基準點(O 點),對方攻擊航母時,其主要來襲方向與航母的連線即為威脅軸。
定義2 預警機陣位:是指航母編隊實施對海作戰(zhàn)或防空作戰(zhàn)時,預警機相對于航母的距離和方位。如圖3 所示,點P 為預警機空中巡邏的中心,該點在威脅軸上。θ 為預警機進行空中巡邏時相對于航母的方位,以威脅軸為0°。 L 為預警機的前出距離。R 為轉(zhuǎn)彎半徑。
定義3 前出距離:艦載預警機在進行空中巡邏時,其陣位的中心點到航母的最小水平距離[11],即為圖2中OP 長度,用L 表示。
圖3 艦載預警機陣位配置圖
5.2 配置要求與影響因素分析
1)要求
(1)建立嚴密的預警偵察體系,及時發(fā)現(xiàn)對方艦艇編隊、飛機的活動情況和行動企圖,盡可能引導己方兵力對其實施先發(fā)制人的打擊;
(2)預警機陣位所在區(qū)域威脅較小,便于己方兵力采取有效的海空掩護措施。
2)考慮因素
(1)對方艦艇編隊可能活動海域、主要空襲方向。盡可能使預警偵察范圍覆蓋對方活動區(qū)域,確保全面、及時掌握戰(zhàn)場情況,以便于引導攔截對方兵力;
(2)航母編隊防御需求。將艦載預警機配置在對方威脅較大的方向,為航母編隊提供較遠距離的情報保障。
(3)考慮其所擔負的任務、航母編隊中警戒艦艇對空雷達探測范圍、航空母艦的特點及相關防空作戰(zhàn)兵力等有關情況。
5.3 陣位配置模型
5.3.1 前出距離算法
1)作戰(zhàn)背景假設
假設己方戰(zhàn)斗機數(shù)量有限,無空中巡邏陣位戰(zhàn)斗機,即預警機無戰(zhàn)斗機進行空中掩護;對方攻擊對象是航母,即不考慮對方攻擊預警機;
2)模型的輸入變量和輸出變量
輸入變量:雷達參數(shù)、飛機性能參數(shù)、作戰(zhàn)相關參數(shù)
輸出變量:預警機前出距離3)公式及參數(shù)和變量說明
(1)對空防御中預警機前出距離算法
tZ為預警機轉(zhuǎn)180°所需時間;tKZ為預警機發(fā)現(xiàn)對方飛機后至攜帶空空導彈的飛機開始出動的時間;tJZ為預警機發(fā)現(xiàn)對方艦艇后至攜帶空艦導彈的飛機開始出動的時間;tP為預警機空中巡邏時平飛時間;sKD為攜帶空艦導彈空空導彈的射程;sJD為空艦導彈的射程;D1為艦載預警機對戰(zhàn)斗機的作用距離;D2為艦載預警機對水面艦艇的作用距離;S1為對方飛機攜帶空艦導彈的射程;S2為對方水面艦艇艦艦導彈的射程;vKL為己方空中攔截飛機的速度;vJL為己方對海攔截飛機的速度;vKD為己方飛機發(fā)射的空空導彈的速度;vDJ為對方飛機速度;vJD為己方飛機發(fā)射的空艦導彈的速度;vJT為對方水面艦艇的航速。
不等式(1)中,不等號左邊為己方從發(fā)現(xiàn)對方飛機到成功攔截對方飛機所用時間:從艦載預警機發(fā)現(xiàn)對方飛機開始到己方飛機出動所用時間+到達攻擊陣位時間+己方空空導彈達到最大射程時間;右邊為對方所用時間:從己方艦載預警機發(fā)現(xiàn)對方飛機開始至對方飛機飛至發(fā)射陣位時間(該時間內(nèi)對方飛機飛行距離為:預警機前出距離+預警機探測距離-對方飛機空艦導彈射程)。
要保證成功攔截對方飛機,則不等式(1)中左邊時間≤右邊時間。
攔截過程:首先根據(jù)預警機的預警探測信息,以及由對方導彈射程推算,得出對方飛機發(fā)射陣位;然后預警機指揮引導己方戰(zhàn)斗機進行攔截,爭取在對方飛機發(fā)射空艦導彈前,成功攔截到對方飛機。
(2)對海作戰(zhàn)中預警機前出距離算法
對于來襲的水面艦艇,同理。
5.3.2 巡航方位角計算
由式(1)、(2)計算出預警機前出距離L,根據(jù)三角函數(shù)計算出巡航角θ

式(5)中,V 為艦載預警機的巡航速度;θ 為預警機巡航角。因此,式(1)、(2)和(5)可用來計算航母編隊對海作戰(zhàn)時預警機的前出距離和巡航角;也可用來計算航母編隊在防空預警作戰(zhàn)時,預警機的前出距離和巡航角。
5.4 仿真分析
加入相應參數(shù),由式(1)~(4)可計算出預警機的最小前出距離為200km,再根據(jù)式(5),計算出對應的巡航角為23°。所以,由此模型得出,艦載預警機的陣位配置為前出距離200km,以威脅軸為正北,±23°范圍內(nèi)巡邏。
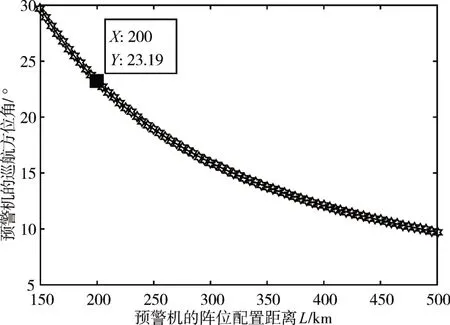
圖4 艦載預警機前出距離與巡航角關系圖
由圖4 可知,艦載預警機的前出距離L 與巡航角θ 成反比例關系[12],即L 越大,θ 越小。實際情況下,為保證預警機自身安全,尤其在對空防御作戰(zhàn)中,預警機多為靠近航母部署。如果確定對方來襲方向,為達成先發(fā)現(xiàn)、盡早攔截等戰(zhàn)術目的,可適當前出,此時預警機巡航角可適當減小,使預警機和來襲兵力的連線垂直預警機巡邏邊長,這樣可在最遠作用距離上盡快探測發(fā)現(xiàn)對方飛機,結(jié)果與實際情況相符。此外,實際中可根據(jù)對方飛機∕艦船型號、掛載武器等不同,設置不同參數(shù),來進行分析,為航母編隊對海作戰(zhàn)、對空防御起一定的參考。
6 結(jié)語
為解決艦載預警機陣位配置問題,本文首先介紹了美軍航母編隊防空預警體系,分析了預警機在體系中發(fā)揮的作用,由此提出了預警機預警探測和活動方法的基本要求,并分析了預警機陣位確定的方法。為確保己方水面艦艇編隊的安全,預警機要在對方對艦船有效打擊范圍之外,發(fā)現(xiàn)并引導己方兵力對其攔截,最后仿真計算了預警機的前出距離和巡航方位角間的相互制約關系。
猜你喜歡
青少年科技博覽(中學版)(2022年6期)2022-08-31 09:03:40
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環(huán)球時報(2022-05-30)2022-05-30 15:16:57
小哥白尼(趣味科學)(2020年12期)2021-01-18 06:15:26
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
青少年科技博覽(中學版)(2020年2期)2020-05-21 03:35:16
當代陜西(2019年11期)2019-06-24 03:40:28
百科探秘·航空航天(2017年11期)2017-12-20 07:31:34
百科探秘·航空航天(2017年12期)2017-08-15 00:55:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
