某型雷達(dá)調(diào)平機(jī)構(gòu)失效模式和影響分析
2022-08-02 02:14:52孫知建楊江平李逸源
艦船電子工程 2022年6期
孫知建 楊江平 鄧 斌 李逸源
(空軍預(yù)警學(xué)院 武漢 430019)
1 引言
雷達(dá)裝備作為典型的信息化裝備之一,發(fā)揮著“千里眼”的作用,其功能越來越強(qiáng),集成度越來越高,故障模式也越來越復(fù)雜,雷達(dá)裝備在使用過程中會(huì)產(chǎn)生不同程度的失效問題,對(duì)裝備進(jìn)行失效分析,已成為提高雷達(dá)裝備可靠性和提升戰(zhàn)斗力重要手段。
失效模式與影響分析(FMEA)現(xiàn)已被廣泛應(yīng)用于裝備研發(fā)領(lǐng)域,它不僅可以在裝備的設(shè)計(jì)階段進(jìn)行故障模式影響分析,還能在裝備制造、使用及維修階段中進(jìn)行分析。加強(qiáng)雷達(dá)裝備失效模式與影響分析研究,對(duì)提高雷達(dá)裝備固有可靠性和戰(zhàn)備完好率具有重要意義。
2 某型雷達(dá)調(diào)平機(jī)構(gòu)
2.1 機(jī)構(gòu)組成
雷達(dá)調(diào)平裝置是雷達(dá)重要組成部分,對(duì)于提高天線座機(jī)動(dòng)架設(shè),調(diào)平性能,以及精確地測(cè)量目標(biāo)的位置等參數(shù)都起著決定作用。自動(dòng)調(diào)平裝置采用可編程計(jì)算機(jī)控制器為核心組成的數(shù)字控制系統(tǒng),通過對(duì)水平傾角傳感器部件的水平傾角角度的智能實(shí)時(shí)檢測(cè),控制交流伺服電機(jī)驅(qū)動(dòng),電機(jī)再牽引滾珠絲杠運(yùn)動(dòng),實(shí)現(xiàn)天線座車四條支撐腿聯(lián)動(dòng)并調(diào)至水平狀態(tài)。
某型雷達(dá)調(diào)平機(jī)構(gòu)組成圖如圖1所示。
2.2 工作原理
調(diào)平機(jī)構(gòu)通過人機(jī)界面接收操作人員的操作指令,通過伺服電機(jī)驅(qū)動(dòng)四條支腿運(yùn)動(dòng),實(shí)現(xiàn)單腿升降運(yùn)動(dòng)、四條支腿同步升降運(yùn)動(dòng)以及自動(dòng)調(diào)平運(yùn)動(dòng)。調(diào)平裝置采用PCC 實(shí)時(shí)檢測(cè)天線座車水平傾角傳感器的傾斜度信號(hào),并顯示在調(diào)平顯示板的數(shù)碼上,當(dāng)發(fā)現(xiàn)傾斜度大于系統(tǒng)指標(biāo)時(shí),可按下鍵盤指示板上的“調(diào)平”鍵進(jìn)行自動(dòng)調(diào)平,PCC檢測(cè)到調(diào)平鍵按下后,向四個(gè)電機(jī)驅(qū)動(dòng)器發(fā)出控制信號(hào),使其分別控制各調(diào)平腿電機(jī)的轉(zhuǎn)動(dòng),電機(jī)帶動(dòng)滾珠絲杠轉(zhuǎn)動(dòng),使較低的調(diào)平腿升起,從而改變天線座車的傾斜度。當(dāng)傾斜度達(dá)到規(guī)定值,PCC 使電機(jī)停轉(zhuǎn)。
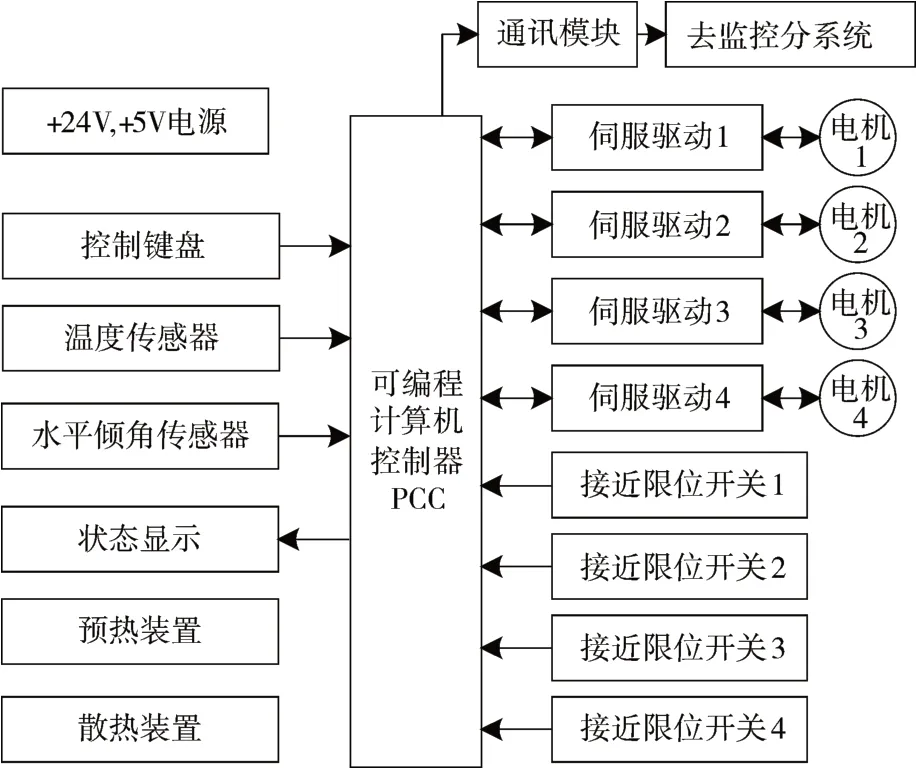
圖1 某型雷達(dá)調(diào)平機(jī)構(gòu)組成圖
3 FMEA定性分析
通過收集該型雷達(dá)調(diào)平機(jī)構(gòu)在設(shè)計(jì)、研發(fā)、使用和維修階段出現(xiàn)的失效問題及各種潛在隱患,運(yùn)用FMEA 方法,找出調(diào)平機(jī)構(gòu)容易出現(xiàn)問題的地方,同時(shí)加以改進(jìn)優(yōu)化。
3.1 分析方法的選取
由于調(diào)平機(jī)構(gòu)所利用的信息比較完整,為此本論文選用以硬件法為主、功能分析法為輔的方法。這樣不但可以充分利用調(diào)平機(jī)構(gòu)現(xiàn)有信息,還可提高分析結(jié)果的準(zhǔn)確性及可信性。
3.2 約定層次劃分
初始約定層次為整個(gè)調(diào)平機(jī)構(gòu),最小約定層次為各部件的組成單元。具體約定層次如圖2所示。

圖2 調(diào)平機(jī)構(gòu)約定層次圖
3.3 故障模式
本文采用故障樹分析法,通過故障樹可以看到調(diào)平機(jī)構(gòu)的故障模式及其之間的相關(guān)聯(lián)系,使得確定具體故障時(shí)也更為簡(jiǎn)單。調(diào)平機(jī)構(gòu)故障樹如圖3 所示。下面以分析“雷達(dá)不能調(diào)平”故障為例,可以看出調(diào)平機(jī)構(gòu)的故障模式一般情況下只有這四種:1)系統(tǒng)無法開機(jī);2)調(diào)平電機(jī)不轉(zhuǎn);3)驅(qū)動(dòng)器報(bào)警;4)數(shù)碼管無顯示;5)啟動(dòng)控制電路故障;6)電源沒有供電。
3.4 故障原因分析
具體失效分析如下。
1)如果是調(diào)平系統(tǒng)電機(jī)驅(qū)動(dòng)器腿故障時(shí),數(shù)碼管閃爍顯示“E1”(第1、2 個(gè)數(shù)碼管對(duì)應(yīng)一號(hào)腿,第3、4 個(gè)數(shù)碼管對(duì)應(yīng)二號(hào)腿,第5、6 個(gè)數(shù)碼管對(duì)應(yīng)三號(hào)腿,第7、8個(gè)數(shù)碼管對(duì)應(yīng)4號(hào)腿,下同),更換備件。
2)如果是調(diào)平支撐腿硬限位時(shí),電機(jī)不轉(zhuǎn),相應(yīng)數(shù)碼管閃爍“E2”,根據(jù)限位的實(shí)際情況按相應(yīng)的按鍵使系統(tǒng)退出報(bào)警狀態(tài)(如果是升腿限位,按收腿鍵;如果是收腿限位,按升腿鍵),否則,轉(zhuǎn)下一步;
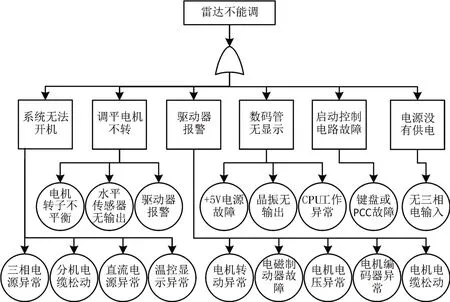
圖3 調(diào)平機(jī)構(gòu)故障樹分析圖
3)調(diào)平支撐腿軟限位時(shí),電機(jī)不轉(zhuǎn),相應(yīng)數(shù)碼管閃爍“E3”。如果是,操作過程同2)條,否則轉(zhuǎn)下一步;
4)驅(qū)動(dòng)器報(bào)“Err-16”故障時(shí),電機(jī)不轉(zhuǎn),檢查電機(jī)接線是否正確,是否有斷線,發(fā)現(xiàn)問題后請(qǐng)正確連線,若正常轉(zhuǎn)下一步;
5)驅(qū)動(dòng)器報(bào)警“21”或“22”故障時(shí),電機(jī)不轉(zhuǎn),檢查編碼器接線是否正確,不正確,則糾正編碼器接線或重新插拔編碼器電纜;正確,轉(zhuǎn)下一步;
6)電機(jī)電磁制動(dòng)器電路連接不正確,電機(jī)不轉(zhuǎn),檢查制動(dòng)信號(hào)是否送達(dá),不正常,在動(dòng)作按鍵按下的瞬間應(yīng)能聽到“咔嗒”一聲電機(jī)解鎖的聲音,如果正常,轉(zhuǎn)下一步;
7)電機(jī)過載時(shí),電機(jī)不轉(zhuǎn),檢查電機(jī)是否有卡殼現(xiàn)象,把撐腿全部收回至零位初始狀態(tài),重新調(diào)平。
3.5 失效影響分析
對(duì)以上故障模式的影響進(jìn)行失效分析,主要是對(duì)調(diào)平機(jī)構(gòu)本身、局部和系統(tǒng)的影響,如表1所示。

表1 調(diào)平機(jī)構(gòu)失效影響分析表
3.6 失效影響評(píng)估
失效影響的評(píng)估主要是以調(diào)平機(jī)構(gòu)故障數(shù)據(jù)統(tǒng)計(jì)分析法與專家打分法相結(jié)合,從故障影響嚴(yán)重程度、故障發(fā)生的概率度、對(duì)故障進(jìn)行檢測(cè)的難度以及故障維修難度等方面進(jìn)行打分,各因子按照影響程度的大小順序從1~10 打分,數(shù)字越大,則影響程度越大,最終形成天線調(diào)平機(jī)構(gòu)失效影響評(píng)估表,如表2所示。

表2 調(diào)平機(jī)構(gòu)失效影響評(píng)估表
3.7 計(jì)算RPN
風(fēng)險(xiǎn)順序數(shù)(RPN)是根據(jù)嚴(yán)重度(S)、發(fā)生度(O)、檢測(cè)難度(D)和維修難度(R)這四個(gè)指標(biāo)對(duì)潛在的故障模式進(jìn)行風(fēng)險(xiǎn)評(píng)估,從而確定影響程度。RPN由四者相乘而得。即:RPN=S×O×D×R,計(jì)算結(jié)果如表3所示。

表3 調(diào)平機(jī)構(gòu)失效RPN結(jié)果表
4 結(jié)語
本文運(yùn)用失效模式和影響分析方法,對(duì)某型雷達(dá)天線調(diào)平機(jī)構(gòu)的可靠性進(jìn)行了分析與研究,得出了天線調(diào)平機(jī)構(gòu)故障模式,對(duì)雷達(dá)整機(jī)結(jié)構(gòu)可靠性的定量分析提供了可以借鑒的故障模式和危害影響分析方法。
猜你喜歡
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2022年3期)2022-03-16 05:55:08
當(dāng)代陜西(2021年2期)2021-03-29 07:41:24
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
中國(guó)塑料(2016年3期)2016-06-15 20:30:00
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
