基于粒子群優化神經網絡的機電系統故障診斷*
2022-08-02 02:16:58張鑫
艦船電子工程 2022年6期
張 鑫
(商洛學院電子信息與電氣工程學院 商洛 726000)
1 引言
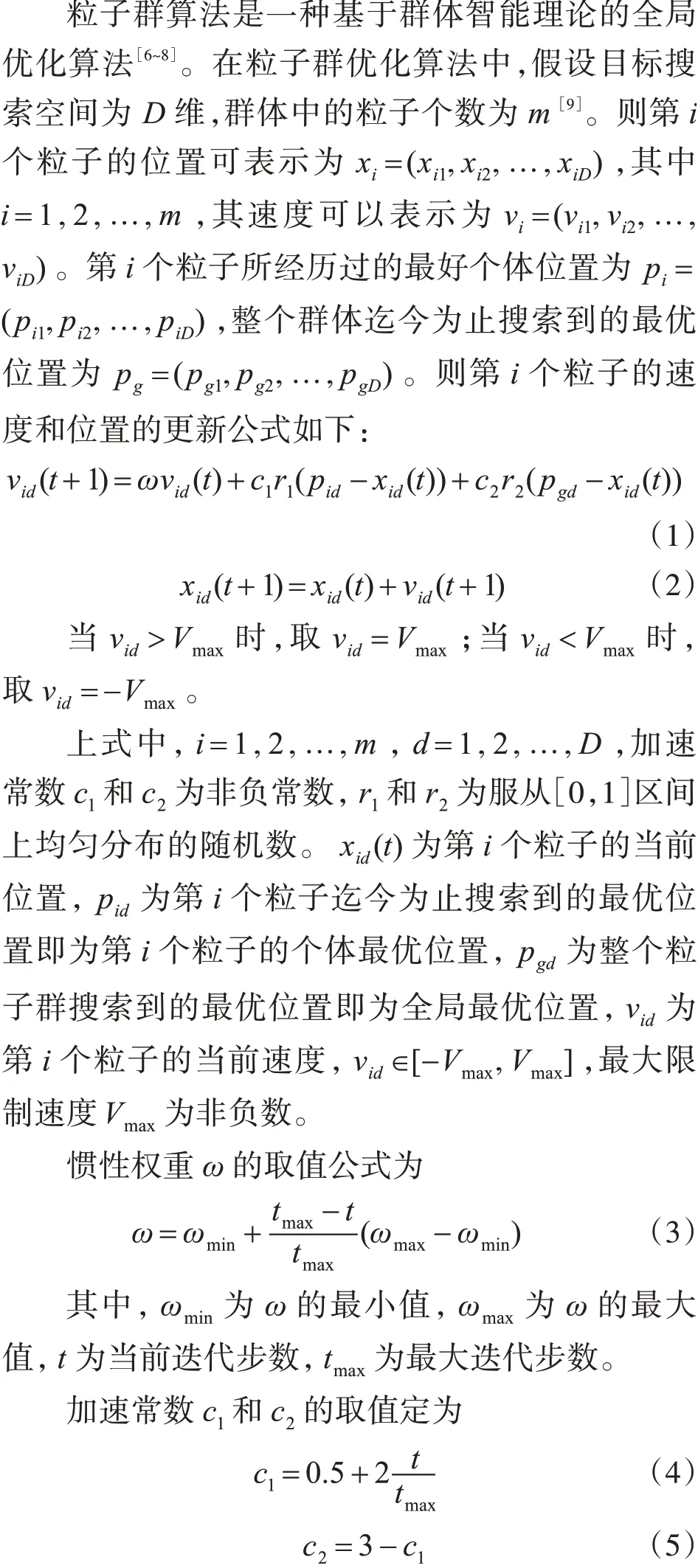
隨著現代科學技術的不斷發展,飛機上的各種設備變得越來越先進和復雜,使得故障診斷技術的應用在航空領域顯得愈發重要[1~3]。在線故障診斷是無人機機電系統仿真平臺需要實現的基本功能之一。在仿真平臺下,由于采取用Simulink 模型代替實物模型作為仿真對象,因此實質上是對建立的仿真模型進行故障模擬和故障診斷。這要求平臺能夠實時獲取仿真模型的輸出信號,結合機電系統的相關故障特征,利用相關故障診斷方法對系統進行故障診斷。本文結合某型無人機機電系統的故障特點,利用基于粒子群的神經網絡故障診斷技術實現對該無人機的燃油子系統及液冷裝置的故障診斷。
2 BP神經網絡
BP 神經網絡是誤差反向傳播神經網絡(Back Propagation Neural Network)的簡稱[4],是一種具有糾錯學習功能的多層前饋神經網絡,在目前的模式識別、故障診斷等領域中的應用比較成熟。
BP 神經網絡可以把目標與訓練樣本輸出的問題轉換為非線性的優化問題[5],利用梯度下降法不斷迭代以得到神經元間的權值,最終通過權值反映輸入輸出間的映射關系,相當于利用訓練神經網絡模擬出一個故障的模式識別系統,該系統能夠實時接收來自模型反饋回的故障特征數據,這樣就可以利用已有的知識來根據不同的輸入模式診斷出相應的輸出結果,同時可根據需要對輸入模式再學習,以識別各種需鑒別的模式。
3 粒子群算法優化BP神經網絡
式中,t 為當前迭代步數,tmax為最大迭代步數。
用粒子群優化神經網絡其實質是通過粒子群算法對神經網絡的連接權值與閾值進行尋優。選擇神經網絡的實際輸出與理想輸出間的均方差作為粒子群優化時的適應函數。即適應度值函數可以表示為

式中,N 為訓練集的樣本數,C 為輸出層的神經元的個數,ydj,i為用第i 個樣本進行訓練時輸出層第j 個節點的理想輸出值,yj,i為用第i 個樣本進行訓練時輸出層第j 個節點的實際輸出值。
優化后的具體流程如下:
1)進行初始化。設定ω,初始c1和c2,最大迭代次數tmax,粒子速度和位置的取值范圍,以及初始位置和速度(初始位置為每個粒子的個體最優位置pid);
2)根據式(6)計算每個粒子在每一維空間的適應度值J ;
3)將當前J 與pid進行比較,如果J 更好,則用J 代替pid,并將個體最優位置設置為當前位置,否則不變;
4)將J 與pgd進行對比,如果J 更好,則將J設為pgd,并將群體最優位置設置為當前位置,否則不變;
5)根據式(3)更新ω,式(4)和式(5)更新c1和c2,同時更新vi和xi;
6)若滿足精度要求或t=tmax,則結束,否則返回2)繼續。
優化后的的流程圖如圖1所示。
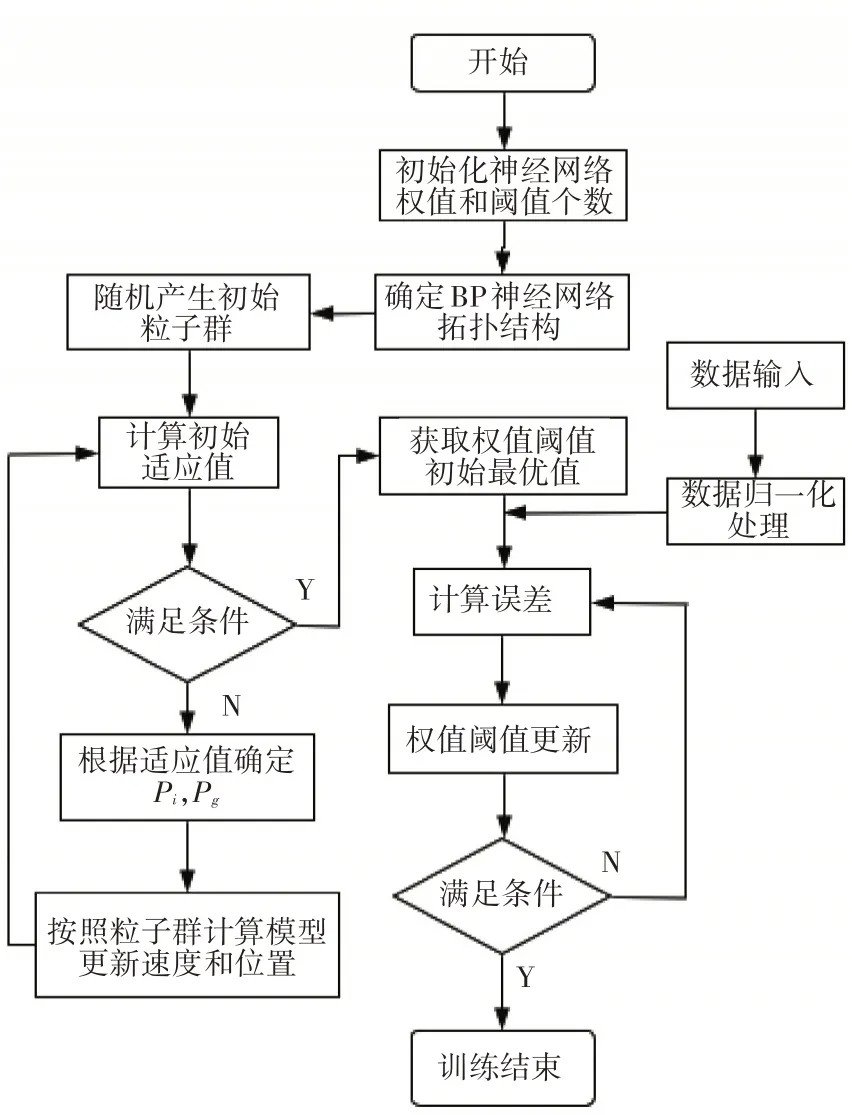
圖1 流程圖
4 機電系統故障診斷
本文主要對無人機的燃油系統及液冷裝置進行故障診斷。
1)燃油系統故障診斷
對燃油系統,主要考慮比較常見的燃油增壓泵故障以及供油管道故障[10~12]。利用建立的模型,分別對各故障進行模擬,包括:(1)左增壓泵故障FF1;(2)右增壓泵故障FF2;(3)供油總管道泄漏故障FF3;(4)供油總管道阻塞故障FF4;(5)供油左管道泄漏故障FF5;(6)供油左管道阻塞故障FF6;(7)供油右管道泄漏故障FF7;(8)供油右管道阻塞故障FF8。
同時選取左增壓泵流量LQo,左增壓泵出口壓力LPo,右增壓泵流量RQo,右增壓泵出口壓力RPo,左發入口流量LQE、左發入口壓力LPE,右發入口流量RQE、右發入口壓力RPE作為神經網絡的輸入,以發動機處于最大耗油狀態的情況為例,可以得到供油管路故障的神經網絡訓練樣本如表1 所示。

表1 燃油系統輸入樣本
表1中流量單位為m3∕h,壓力單位為105pa。
利用式(7)歸一化處理數據:

其中,x'為歸一化后的數據,x 為原始數據,xmax以及xmin分別為x 的最大值和最小值。由于表中數據的數值大小均分布在0~1.5 之間,歸一化后的輸入矩陣P為
從以上測試結果可得,該網絡對各種故障模式的 誤 差 依 次 為0.0006,0.0005,0.0148,0.0006,0.0006,0.0923,0.0014,0.0235。該網絡能夠較好地識別各種故障。
2)液冷裝置故障診斷
對液冷裝置,主要考慮較為常見的液冷組件電動泵泵故障、液冷管道堵塞故障、液冷管道泄漏故障以及設備冷板的結垢故障[13]。利用建立的模型,分別對各故障進行模擬,包括:(1)液冷組件電動泵故障EF1;(2)液冷管道堵塞故障EF2;(3)液冷管道泄漏故障EF3;(4)設備冷板的結垢故障EF4。
同時選取液冷組件電動泵出口壓力Po,液冷組件電動泵出口流量Qo,液冷組件出口溫度To,設備冷板溫度Td 作為神經網絡的輸入,可以得到該無人機液冷裝置故障的神經網絡訓練樣本如表2所示。
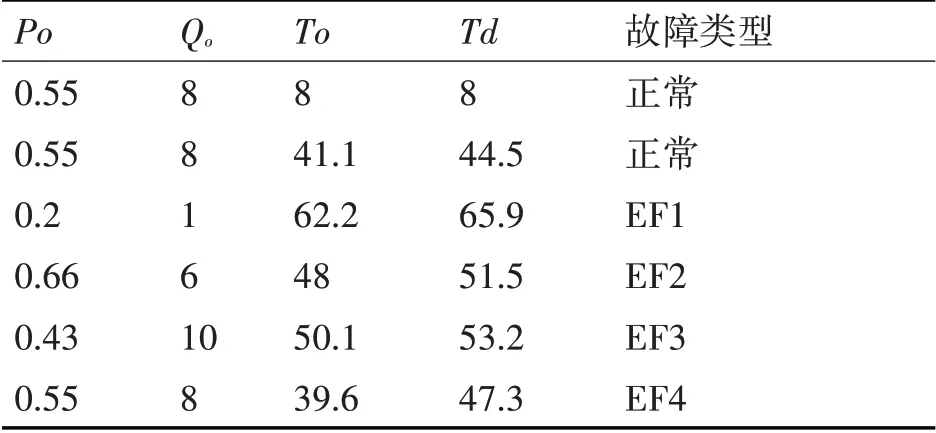
表2 液冷裝置輸入樣本
表中流量單位為L∕min,壓力單位為MPa,溫度單位為℃。
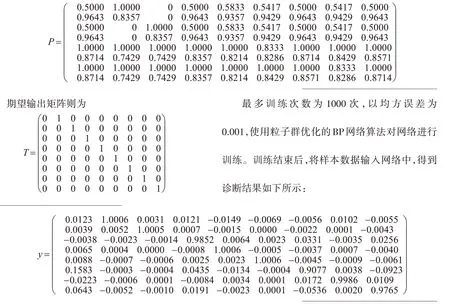
歸一化處理后的輸入矩陣P為

同樣最多訓練次數為1000 次,以均方誤差為0.001,使用粒子群優化的BP 網絡算法對網絡進行訓練。訓練結束后,將樣本數據輸入網絡中,得到診斷結果如下所示:

從以上的測試結果可得,該網絡對各種故障模式的誤差依次為0.0091,0.0140,0.0179,0.0369。顯然該網絡能夠較好地對各種故障進行診斷。
5 結語
首先介紹了BP 神經網絡和粒子群算法,然后通過粒子群算法對BP神經網絡進行了優化。對于無人機的燃油系統及液冷裝置所建模型,根據故障模式設置相關的參數運行模型,將得到在不同故障下的傳感器輸出數據。將這些數據作為樣本數據,對其進行歸一化處理,對粒子群優化后的BP 神經網絡進行訓練。再利用優化算法對故障進行診斷,得到了滿意的效果。結果表明,該算法簡單易實現,對無人機的機電系統故障診斷效果良好。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
