一種模塊化水下探測拖體的設計與實現*
2022-08-02 02:17:54王友東李海兵付碧波郭子偉劉華龍
艦船電子工程 2022年6期
王友東 李海兵, 付碧波 郭子偉, 劉華龍
(1.青島海洋科學與技術試點國家實驗室 青島 266237)(2.北京航天控制儀器研究所 北京 100039)
1 引言
水下拖曳系統是一種廣泛應用于海洋監測、海洋研究以及軍事等領域的水下探測裝置。在現代研究和開發海洋的先進技術手段中,拖曳系統裝備具有極其重大的意義[1]。水下拖曳系統通常由母船、甲板絞車、拖曳纜、拖體組成[2],其中拖體是整個系統的關鍵組成部分,它通過拖曳纜由母船在水中按規劃路線拖曳執行探測任務,拖體內部根據不同任務搭載溫鹽深儀、流速計、磁力儀等探測海洋地質、海洋水文和生態環境的傳感器。由于水下拖曳體具有廣泛的適應性,且工作效果良好,便于探測海水底資源及各種有用信息[3],所以如何根據任務需求在不改變拖體整機外形的基礎上,實現不同載荷的快速搭建是評價拖體是否滿足經濟實用具有市場推廣價值的關鍵指標。本文以此為目標,介紹了一種模塊化探測拖體的設計方案,該拖體采用模塊化結構設計,可以基于任務需求快速增減模塊。拖體樣機通過海試試驗驗證,整機在水中運行姿態穩定,性能良好。
2 外形結構方案設計
拖體外形有多種不同形式,主要分為回轉體和非回轉體;回轉體形又可分為水滴形[4]、魚雷形和Myring 外形[5]。水滴形由首尾兩部分組成,中間無平行中體,首尾比較尖銳,線型光順,為典型的流線形外形;水滴形在水中所受阻力最小,一般適用于在水中高速行進的航行器。魚雷形由首尾兩部分加中間平行中體組成,首部采用圓頭或者尖頭形式,中間有很長的平行中體,尾部比較短。Myring線形是一種廣泛應用于水下航行的主體線型,阻力相對很小,水下阻力性能稍差于水滴形,外形和魚雷形相似,所不同的是尾部包角θ值變化情況不同,尾部曲線斜率變化不一樣[6]。綜合考慮航行阻力和內部布置空間因素,擬選用Myring線形作為本次拖體的外形。
3 模塊化艙段設計
為提高拖體使用的方便性,降低研發費用,縮短研發周期,采用模塊化的理念設計拖體的各個艙段。模塊化設計不僅可以加強各個系統的融合程度,提升設備的整體性能,而且通過模塊化的組合還能輕松實現任務的擴展和重構[7]。拖體整機結構按照模塊化理念設計,按功能模塊分為艏艙、系統控制艙、浮力調節艙、載荷艙和尾艙。其中系統控制艙和載荷艙為水密艙,其余艙段為非水密艙;水密艙由前后兩個密封蓋和中間圓柱形艙體構成,采用O 形橡膠密封圈徑向密封。各個艙段之間通過法蘭連接,艙體通過螺釘徑向固定在法蘭上,艙段連接方式如圖1所示。
圖1 艙段連接方式示意圖
3.1 艏艙
艏艙設有導流罩、承重拖鉤和固定連桿。導流罩外形采用Myring線形公式計算定型,整體呈橢圓形,采用3D打印技術用ABS塑料一體加工而成,有效降低了拖曳過程中水流阻力。導流艙內部剩余空間填充浮體材料,為拖體提供水中航行時所需浮力。艏艙的結構示意圖如圖2所示。
3.2 系統控制艙
系統控制艙是拖體的核心艙段,內部設備主要包括數據記錄儀、程控電源、主控計算機開發板、串口服務器、通信模塊等器件。數據記錄儀采用雙硬盤記錄,主要用于存儲磁力儀等載荷所采集的數據,實現載荷數據的本地存儲;程控電源實現電源管理和交直流變換,為內部所有設備供電;主控計算機開發板用于艙段內部設備管理,電源控制等;串口服務器將串口設備通信接口轉換為CAN 總線,實現總線輸出傳出和控制;以太網交換機用于實現遙控站與拖體之間的長距離通信,載荷設備與記錄儀之間數據通信以及攝像頭數據的傳輸;北斗通信模塊實現遙控站與拖體的遠距離衛星通信,提供拖體的位置信息,用于拖體丟失后的搜索定位。系統控制艙結構示意圖如圖3所示。
圖2 首艙結構示意圖
圖3 系統控制艙結構示意圖
3.3 浮力調節艙
浮力調節艙為非水密艙段,主要包含配重調節塊、浮體材料、平衡水翼以及艙段頂部的天線組件和應急頻閃燈。配重調節模塊用于調節拖體重心,保證拖體整機重心低于浮心從而降低拖曳時發生傾覆的風險;平衡水翼采用碳纖維材料制作,對稱安裝在艙段的左右兩側,用于增加拖體整機穩定性,提升扶正力矩。浮體材料選用聚氨酯泡沫,密度0.38g∕cm3,用于提供拖體整機所需浮力,保證拖體在水中處于零浮力狀態。天線組件包括GPS 天線、銥星天線和無線電臺天線;GPS 天線露出水面時可以實現GPS衛星信號接收,提供拖體的位置信息;銥星天線實現遙控站與拖體的遠距離衛星通信,用于拖體丟失后的搜索定位;無線電臺天線實現遙控站與拖體的近距離無線通信;應急頻閃燈主要作用是天氣能見度不高或者夜間試驗的時候便于發現拖體的位置。浮力調節艙段結構示意圖如圖4所示。
圖4 浮力調節艙結構示意圖
3.4 載荷艙
載荷艙主要包括高精度光纖慣導、三分量磁力儀、時標板和輔助傳感器組件。高精度光纖慣導通過測量拖體的轉動角速率和加速度信息,實時計算出拖體的航向角、俯仰角、滾動角等姿態數據信息,并進行組合導航濾波,最終給出最優化導航結果。三分量磁力儀主要用于高精度的弱磁測量,測量范圍包括空間磁場測量、交變磁場測量、環境磁場監測;與總場測量相比海洋地磁三分量側量能夠獲得更多的地磁場矢量信息[8]。時標計算機為多個設備輸出無時間標記的數據,添加時間信息,方便后期數據處理。輔助傳感器組包括溫、濕度傳感器和進水傳感器,溫、濕度傳感器可以實時監測載荷艙內的溫濕度信息;進水傳感器用于對載荷艙是否進水檢測,如果進水傳感器會觸發警報,提示操作人員及時將拖體拉出水面。載荷艙段示意圖如圖5所示。
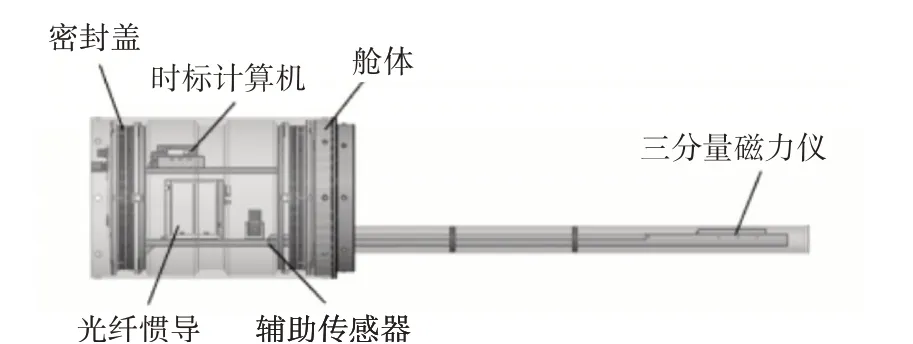
圖5 載荷艙結構示意圖
3.5 尾艙
拖體在水中拖曳時不可避免收到水體粘性阻力和波浪的影響,所以減小行進阻力和動力消耗是設計中的一個主要關鍵點[9]。拖體尾艙同樣采用Myring線形公式計算定型,與艏艙和中間艙段共同構成拖體的流線形外形。尾部艙主要包括四個尾翼和兩臺舵機。尾翼外形采用NACA0012 對稱翼型設計[10],按照“十”字形安裝在尾艙外表面,尾翼和舵機通過傳動軸相連,舵機可根據遙控站指令改變尾翼的角度,進而調節拖體在水中的姿態。尾部艙結構示意圖如圖6所示。

圖6 尾部艙結構示意圖
4 整機流體仿真
若拖體在拖曳前進過程中發生大幅度、高頻率的縱搖和升沉,則其搭載的傳感器就不能正常工作,甚至會傳輸出錯誤的探測信號。復雜的海況將給拖曳系統的運行帶來擾動,良好的系統設計方法有助于提高拖曳系統抵抗風、浪、流干擾的能力[11]。水下拖體在運動時所受的干擾主要由流場干擾組成[12],本文基于Fluent仿真軟件對拖體工作時周圍流場進行了模擬。首先建立圓柱體數值水池,直徑10m,長度16.5m,水池的入口出口分別設置為速度入口邊界、自由出口邊界,拖體表面設置為壁面邊界,來流速度設置為4kn,計算域如圖7所示。
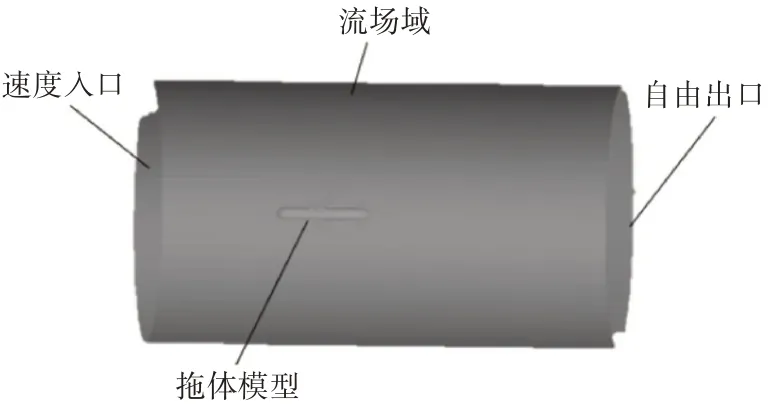
圖7 拖體流體仿真計算域
通過仿真結果發現阻力較大的位置主要集中在拖體頭部和天線導流罩前部,隨著拖體線形逐漸往后減小,尾部后端阻力降至最小。拖體頭部、天線導流罩前端、尾部后端等處呈現了低速流動區域;在頭部兩側等線性變動比較大的部分呈現出高速流動區域;流場整體過渡比較平滑,只在天線導流罩和尾翼附近的流場出現了局部紊亂,拖體的阻力出現小幅度的增加。從分析結果可以得出拖體的外形和水動力部件的布置符合流體力學設計要求,可以使拖體獲得良好的拖航穩定性。
5 試驗驗證
為驗證拖體基本功能及探測數據穩定性,2021年7 月在青島小管島海域進行了海試。拖體的姿態穩定性對數據測量具有關鍵的意義,試驗過程利用高精度光纖慣導對拖體俯仰角、橫滾角的變化進行了記錄。圖8 為拖曳速度為4 節時,拖體在水中的姿態圖,圖9 為海試過程中拖體俯仰角和橫滾角的變化情況。從圖中可以看出俯仰角的變化范圍在±5°之間,橫滾角的變化范圍在±10°之間,整個過程拖體姿態比較穩定好,可以達到預計水平。

圖8 拖體海試圖
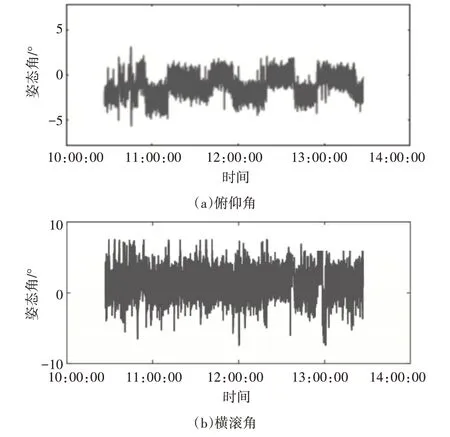
圖9 拖體海試俯仰角、橫滾角變化圖
6 結語
本文系統介紹了模塊化拖體的設計過程,描述了艙段之間的連接方式及各個艙段的主要組成設備。經過流體力學軟件仿真分析和試驗驗證表明,該拖體性能穩定可靠,拖曳時姿態穩定性可以滿足要求,對后續拖體的總體設計具有一定的借鑒和指導意義。
猜你喜歡
《學習方法報》歷史中考版(2023年21期)2023-11-09 07:40:38
海洋信息技術與應用(2022年1期)2022-06-05 07:38:22
裝備制造技術(2021年2期)2021-07-21 05:38:44
數學小靈通(1-2年級)(2020年9期)2020-10-27 03:24:18
現代裝飾(2020年5期)2020-05-30 13:01:56
當代貴州(2019年41期)2019-12-13 09:28:56
中國核電(2017年2期)2017-08-11 08:00:56
流程工業(2017年4期)2017-06-21 06:29:52
流程工業(2017年4期)2017-06-21 06:29:50
中國共青團(2015年7期)2015-12-17 01:24:38
