基于建模預測與關系規則的養殖水體溶解氧含量調控方法
2022-08-05 00:37:58周新輝樊宇星段青玲
農業機械學報 2022年6期
周新輝 黃 琳 樊宇星 段青玲
(1.中國農業大學信息與電氣工程學院,北京 100083;2.中國農業大學國家數字漁業創新中心,北京 100083;3.寧波市海洋與漁業研究院,寧波 315000)
0 引言
工廠化養殖作為未來水產養殖重要的生產模式,其生產效率將直接決定水產養殖的總產量和收益[1-2]。養殖水環境是水產品賴以生存的棲息地,其中水體溶解氧含量是衡量養殖水質的關鍵水質因子[3-4]。工廠化養殖中,由于養殖密度大,且養殖環境具有封閉性,養殖過程經常面臨低氧帶來的風險。為了提高溶解氧含量,養殖工廠通常全天開啟大功率增氧機,但是這種增氧操作存在能耗過大等問題。因此,構建整套溶解氧控制系統,最大程度優化增氧效果、降低能耗是水產養殖行業主要的目標。
隨著工廠化養殖的不斷發展,國內外許多學者對溶解氧的調控開展了大量的研究[5-8]。其中,溶解氧最為普遍的調控方法是基于閾值的開關定時控制。這種調控方式需要根據養殖水產品的實際生長需求設定溶解氧含量的閾值區間,如果溶解氧含量低于下限就開啟增氧機,高于上限就關閉增氧機。由于曝氣增氧過程具有一定的滯后性,如果監測到溶解氧低于閾值時再開啟增氧機,短時間內溶解氧含量不能達到設定值,仍然會對養殖生物造成一定損害。因此,建立溶解氧預測模型,對未來溶解氧含量進行預測,提前指導增氧機進行相關動作是基于閾值的開關定時控制最為關鍵的環節。目前,溶解氧含量預測已經被廣泛研究,許多成熟的預測模型被開發出來,普遍使用的模型主要包括BP神經網絡[9-10]、極限學習機[11]和支持向量機[12]等。基于閾值的開關定時控制雖然可以在一定程度上減少了能源消耗,避免了低氧導致的養殖風險問題,但是無法滿足溶解氧高精度控制的要求。
針對開關定時控制的多種缺點,學者提出了基于智能控制算法的溶解氧精準控制方法。首先需要搭建溶解氧控制系統硬件平臺,然后確保系統各個硬件之間能夠保持良好的通信,最后智能控制算法根據溶解氧實際值與理想設定值的偏差對增氧機進行反饋控制,調節增氧機工作功率,讓溶解氧始終保持在理想設定值范圍內。目前,一些單一的智能控制算法,如模糊控制[13-14]和PID控制[15]是水產養殖溶解氧調控中最常用的兩種控制器。然而,由于水產養殖環境復雜多變,這些單一的控制器參數不能在線調整,在溶解氧控制精度上仍存在一些不足。針對這一缺點,學者提出了一些混合的自適應PID控制器,如模糊-PID控制[16]、BP-PID[17]和RBF-PID[18]控制器。該類控制器可以利用模糊規則或者神經網絡對PID的3個控制參數進行在線調整,以滿足復雜多變的水產養殖溶解氧的控制需求,使溶解氧含量始終維持在理想范圍內。基于智能控制算法的反饋控制雖然能夠滿足溶解氧控制高精度的需求,提升了水產養殖的自動化程度,但是對養殖硬件設施的要求很高,極大增加了養殖成本,不利于推廣使用[19]。
基于此,本文綜合上述2種溶解氧調控方式的優點,提出一種基于建模預測與關系規則庫的溶解氧精準調控方法。首先構建自適應增強的粒子群優化極限學習機(AdaBoost-PSO-ELM)預測模型,實現對溶解氧含量準確預測;然后進行曝氣增氧實驗,探索溶解氧初始質量濃度、曝氣流量和增氧機開啟時間三者之間相互作用關系,制作成增氧機控制規則庫;最后,將溶解氧含量的預測模型與增氧機控制規則庫進行結合,以期合理控制增氧機的開啟時間與功率,起到節能增效的目的。
1 研究方法
1.1 數據采集與預處理
以浙江省寧波市海洋與漁業研究院養殖基地為實驗場地,搭建了一個小型循環水養殖系統,如圖1所示。該系統包括全自動增氧機、微孔曝氣設備、循環水泵、水質傳感器和遠程水質無線監控系統等。養殖水缸為一個圓柱形容器,其半徑為0.75 m,水深為0.8 m。通過計算,養殖水體體積約為1.4 m3。養殖品種為南美白對蝦,約500尾。

圖1 搭建的循環水養殖實驗系統Fig.1 Established circulating water aquaculture system
本文的數據采集方式包括手動采集和自動采集2種方式。手動采集的數據為曝氣增氧數據,自動采集的為水質數據。增氧數據采集過程中,采用鼓入氮氣的方式將溶解氧降低到不同的初始質量濃度,然后再進行曝氣增氧實驗,記錄數據。增氧機微孔氣頭置于養殖水缸底部中央位置。另外,水缸中部署了多種水質傳感器,置于水缸底部邊緣位置,通過物聯網平臺自動采集水質數據。由于養殖水缸搭建在室內,受環境因素影響小,且水體體積較小,可認為溶解氧在水缸空間內呈均勻分布。采集的數據信息如表1所示。
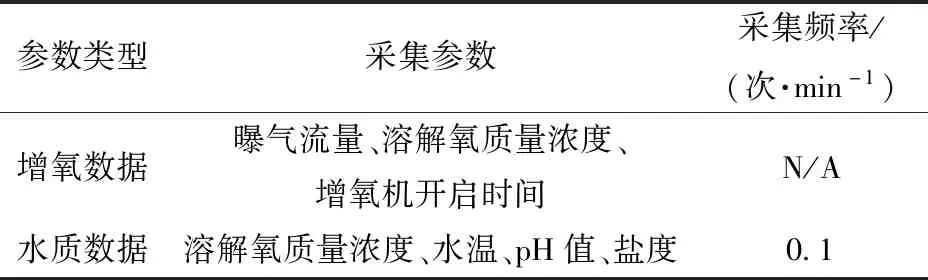
表1 采集數據信息Tab.1 Collected data information

圖3 預測算法流程圖Fig.3 Flow chart of forecast algorithm
實驗時間為2020年9月3—22日,共采集2 908條數據。其中,前2 650條為模型訓練集,后258條為測試集。系統采集數據時,由于受到網絡波動等影響,會造成采集的數據存在異常值和缺失值[20]。采用線性插值法對異常值進行處理,采用均值填充法對缺失值進行處理。
1.2 溶解氧調控方法總體流程
本文提出了一種基于建模預測與關系規則庫的溶解氧含量精準調控方法,其總體流程如圖2所示。

圖2 方法的總體流程圖Fig.2 Overall flow chart of proposed method
(1)溶解氧預測。采集水產養殖水環境數據,如溶解氧質量濃度、水溫、pH值和鹽度等,構建AdaBoost-PSO-ELM溶解氧預測模型,預測未來溶解氧含量。
(2)規則庫構建。進行溶解氧增氧預實驗,對溶解氧初始質量濃度、曝氣流量和增氧機開啟時間進行量化,構建增氧機控制規則表。
(3)溶解氧調控。將關系規則庫和預測模型嵌入計算機監控中心,得到增氧機調控專家系統,專家系統根據溶解氧含量的預測值(如果低于設定閾值),并結合當前溶解氧含量,調用控制規則表,合理指導增氧機的開啟時間與功率。
1.3 自適應AdaBoost-PSO-ELM強預測模型
AdaBoost算法可以將多個弱預測器組合成一個強預測器,用于提升模型的預測精度[21]。本文提出的AdaBoost-PSO-ELM算法基本思想是:首先初始化一個ELM基學習器;然后反復迭代訓練得到多個ELM弱預測器,每次迭代中,對預測誤差較大的樣本進行加大權重,對其進行重點學習,實現“優中選優”;最后結合AdaBoost算法將多個弱預測器通過加權組合成一個強預測器,進一步提高ELM網絡的預測準確率。基于AdaBoost的強預測器算法流程如圖3所示。
AdaBoost-PSO-ELM算法的詳細步驟為:
(1)ELM網絡初始化。對于給定輸入樣本,首先確定ELM網絡結構,并對網絡相關參數進行初始化,ELM網絡結構如圖4所示。
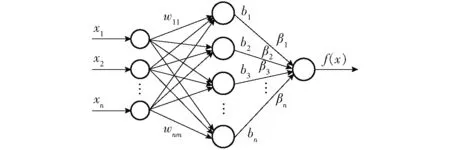
圖4 極限學習機的網絡結構Fig.4 Network structure of extreme learning machine
ELM網絡結構中,輸入向量X=(x1,x2,…,xn),代表傳感器采集的各種水質數據,例如溶解氧質量濃度、水溫、pH值和鹽度等。隱含層偏置B=(b1,b2,…,bn)和輸入權值W=(w11,w12,…,w1m,w2m,…,wnm)的初值是在模型訓練時隨機給定的。輸出向量β=(β1,β2,…,βn)由輸入向量X、輸入權值W和隱含層偏置B共同決定。
(2)初始化樣本分布權值。從樣本空間選擇m組數據,初始化每一個輸入樣本的分布權值
(1)
(3)PSO-ELM弱預測器預測。通過PSO算法對ELM網絡初始參數進行優化,得到多個ELM弱預測器;在訓練第n個ELM弱預測器時,采用訓練集數據進行訓練,得到預測序列的預測誤差和Serror,計算公式為
(2)
(4)計算預測序列權重。根據預測序列的Serror計算序列的權重,n為弱預測器PSO-ELM編號,相應的權重an計算公式為
(3)
(5)權值更新。根據式(3)對第n+1個弱預測器的樣本權值進行調整,重點對上一個弱預測器中預測誤差較大的樣本進行調整,即對預測誤差較大樣本的權值進行加重,適度降低預測準確的樣本的權值,調整公式為
(4)
式中yn——溶解氧質量濃度實際值
fn(xi)——第n個弱預測器第i個樣本的預測值
Dn——第n個弱預測器的分布權值
Zn——歸一化因子,其作用是使所有分布權值之和為1
(6)輸出強預測器函數。經過n次迭代后,得到第n個弱預測器的函數為fn(x),相應的n個弱預測器的權重集合為{a1,a2,…,an},將n個弱預測器加權組合,可得到的強預測器函數Y(x),表達式為
(5)
式中 sign()——符號函數
1.4 基于多項式擬合的增氧機控制規則庫建立
水產養殖曝氣增氧過程中,增氧能力主要與養殖生物品種、養殖密度、水體體積、曝氣流量和溶解氧濃度有關。實驗過程中,養殖品種、養殖密度和養殖水體短時間內不會發生巨大變化,因此,曝氣流量是溶解氧調控過程的主要操控變量。相關研究指出,水體溶解氧質量濃度越高,增氧效率就會越低,當水體溶解氧達到飽和時,增氧效率基本為零[22]。為了提高能源利用效率,針對本文的溶解氧含量調控模式,對增氧能力進行精確量化,構建規則庫是實現溶解氧含量合理調控的前提。
關系規則庫構建是增氧機控制的關鍵部分,需基于溶解氧增氧初始濃度、曝氣流量和增氧機開啟時間之間的量化結果。關系規則庫的構建主要分為3個步驟:
(1)進行增氧實驗,掌握不同曝氣流量下的溶解氧響應規律。
(2)設置一個理想的溶解氧質量濃度,進行曝氣實驗,并記錄增氧初始質量濃度和溶解氧達到理想值時增氧機的開啟時間。將記錄的數據導入Matlab擬合工具箱,選擇最小二乘擬合法和多項式先驗方程對三者之間的相互作用關系進行量化。
以一元線性擬合為例,最小二乘法的最優擬合原理是使采樣點與被擬合直線之間的距離平方和最小,具體公式為
(6)
式中a、b——代求系數yt——擬合值
xt——實際值
多變量的曲面擬合數學方程式有多項式函數和傅里葉級數2種形式,其中最常用的是多項式函數形式。因為多項式能夠逼近任何連續函數,因此,用多項式作為多變量擬合的先驗方程,能夠精確反映出變量之間的非線性關系。目前,常用的多項式形式為:
二次多項式
z=a0+a1x+a2y+a3x2+a4xy+a5y2
(7)
三次多項式
z=a0+a1x+a2y+a3x2+a4xy+a5y2+a6x3+
a7x2y+a8xy2+a9y3
(8)
式中z、x、y——變量
a0~a9——待定常量
(3)為了合理地制定控制規則,減少計算量,首先需要基于多項式的量化結果,對3個變量(曝氣流量、溶解氧初始質量濃度、增氧機開啟時間)進行模糊等級劃分。然后,結合實際的養殖系統情況和專家經驗,歸納總結得出合理的增氧機控制規則庫。
1.5 溶解氧預測模型與規則庫的聯合調控原理
本文提出的溶解氧調控方法主要包括溶解氧含量建模預測和關系規則庫構建。溶解氧建模預測主要對未來時刻溶解氧含量進行預測,提供溶解氧含量變化的先驗曲線。關系規則庫制定了不同溶解氧質量濃度下的增氧機開啟方式(時間與功率),為溶解氧合理調控提供基礎。
在養殖水質監控平臺中,溶解氧預測模型根據傳感器采集的水質數據對未來時刻溶解氧含量進行預測,如果預測值低于設定的安全閾值,增氧機控制專家系統會調用規則庫,并結合當前時刻的溶解氧含量,通過查表的方式輸出增氧機調控方式,即最優的增氧機開啟時間和開啟功率。基于溶解氧建模預測與規則庫的溶解氧調控流程如圖5所示。
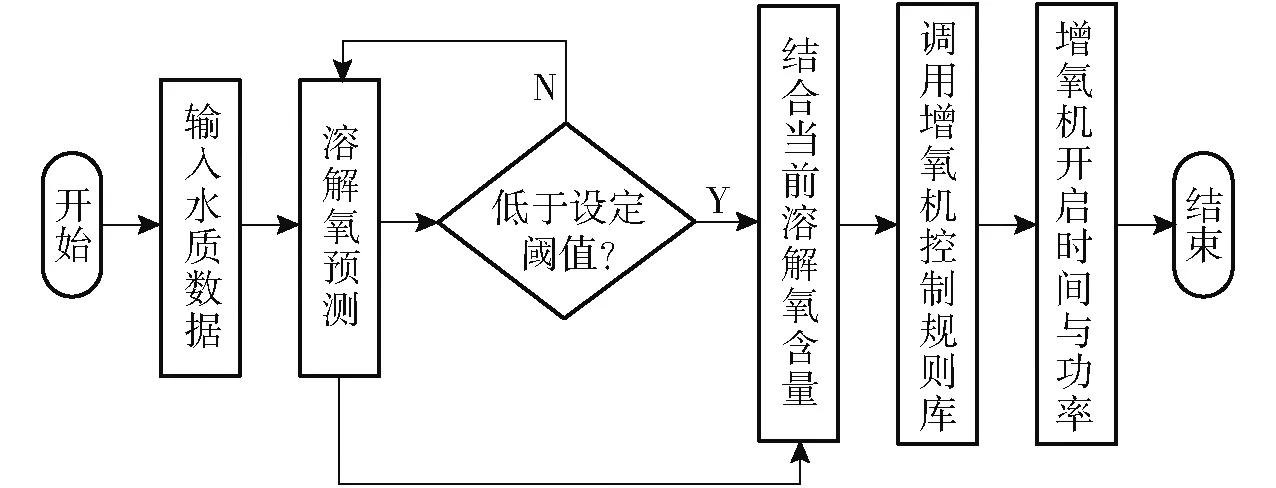
圖5 溶解氧調控整體流程圖Fig.5 Overall process of dissolved oxygen regulation
1.6 性能評價指標
本文采用決定系數(Coefficient of determination,R2)、誤差平方和(Sum of squares due to error,SSE)、平均絕對誤差(Mean absolute error,MAE)、均方誤差(Mean squared error,MSE)以及均方根誤差(Root mean squared error,RMSE)評估預測模型和曲面擬合的準確性。一般情況下,決定系數絕對值越接近于1,擬合精度越高;其余指標值越小,模型預測精準度越高[23-24]。
2 試驗與結果分析
2.1 基于Adaboost-PSO-ELM的溶解氧含量預測結果
為避免ELM網絡參數隨機化,利用PSO算法尋優得到ELM的最優輸入權值和隱含層偏置。PSO參數設置:種群規模為25,最大迭代次數為100,最大慣性權重為0.8,最小慣性權重為0.4,最大速度為1,最小速度為-1,學習因子分別為2.4和1.6。在PSO迭代過程中,本文以溶解氧質量濃度實際值與預測值均方誤差(MSE)作為粒子尋優的目標函數,迭代次數與均方誤差的關系曲線如圖6所示。
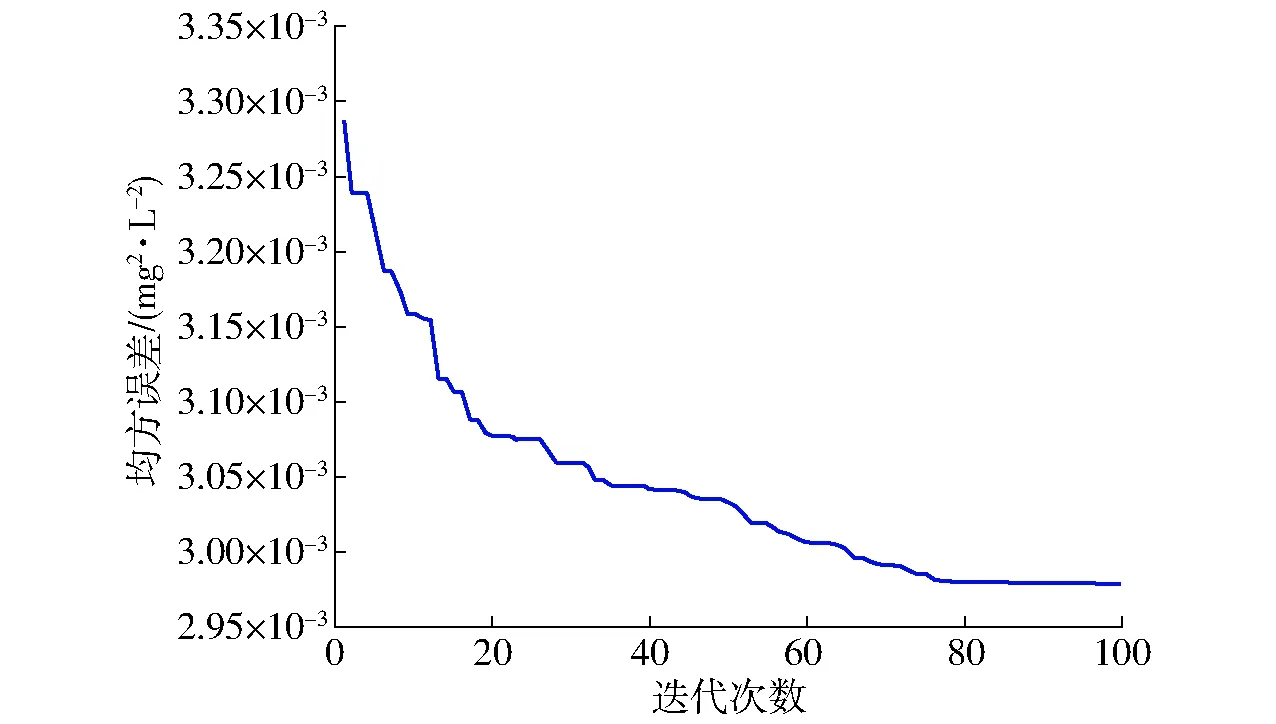
圖6 PSO尋優過程的均方誤差Fig.6 Mean square error of PSO optimization process
從圖6中可以看出,在迭代的初始時刻,粒子種群的收斂速度很快,均方誤差迅速下降。隨著迭代次數的增加,粒子種群的收斂速度趨于平緩,當PSO在尋優過程中迭代到80次左右時,均方誤差已不再下降,此時得到最優解。將獲得的最優網絡權值和偏置輸入ELM網絡訓練溶解氧預測模型。
為了說明本文提出的模型有更優越的預測性能,將AdaBoost-PSO-ELM的預測結果分別與PSO-ELM、ELM、BPNN和WNN模型進行對比,以MSE、MAE和RMSE作為模型性能的評價指標。AdaBoost-PSO-ELM采用PSO優化后的權值和隱含層偏置作為網絡輸入參數,選擇“sigmoid”函數作為網絡的激活函數。實驗中,所有的預測模型運行都是基于Matlab 2014a環境。本文使用同一批水質數據集,以預測1 h后的溶解氧含量為例,5種模型對溶解氧質量濃度的預測結果見圖7。
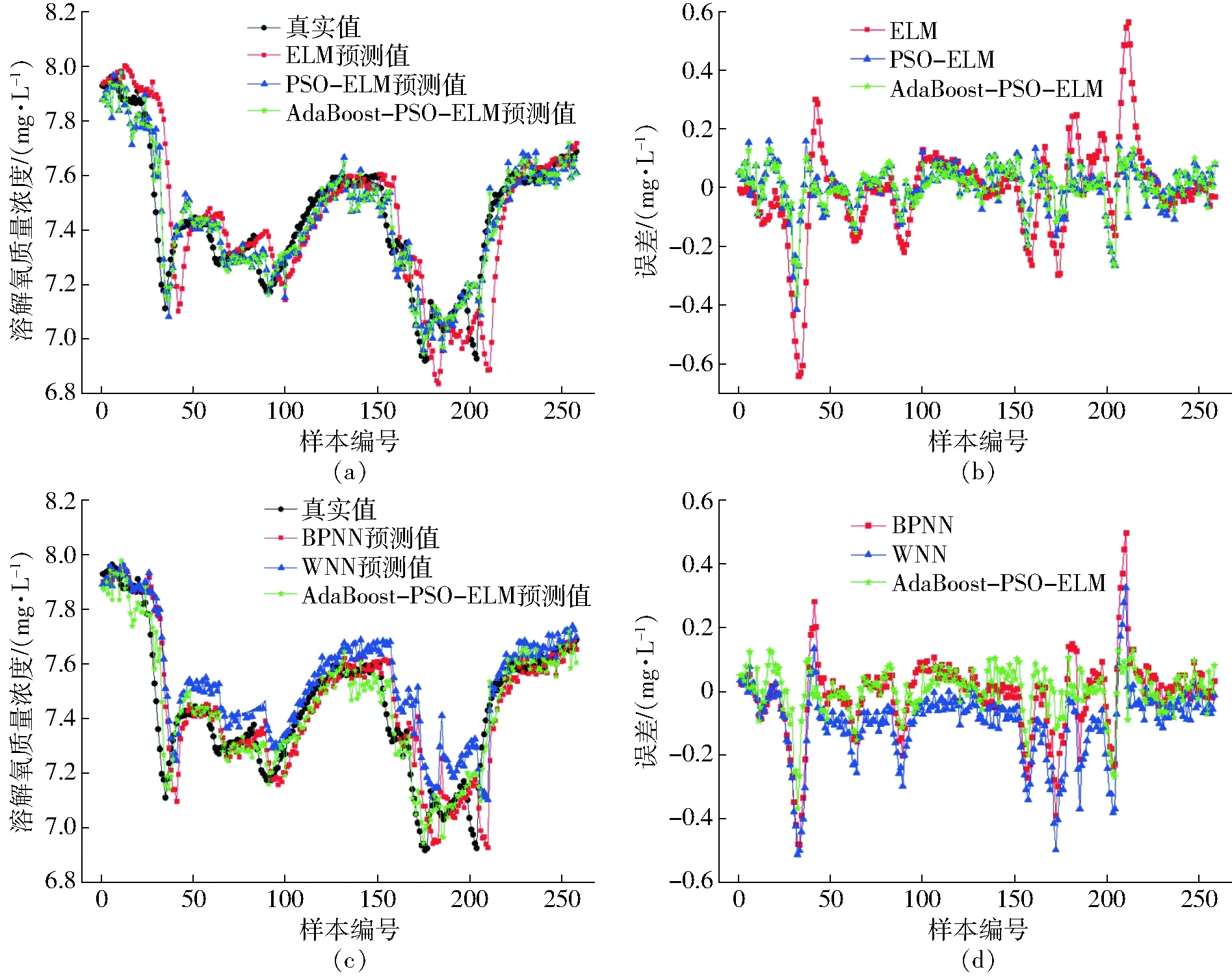
圖7 不同模型的溶解氧預測結果Fig.7 Dissolved oxygen prediction results of different models
從圖7a可以看出,ELM的預測效果最差,溶解氧含量預測值與真實值偏差較大。當使用PSO對ELM的網絡初始參數進行優化以后,ELM的預測效果得到極大改善。在PSO-ELM預測模型的基礎上,構造由3個PSO-ELM組成的弱預測器,然后采用AdaBoost算法將3個PSO-ELM弱預測器組成1個強預測器,再次對溶解氧含量進行預測。預測結果表明,相較于PSO-ELM模型,AdaBoost-PSO-ELM模型再次提升了預測精度。從圖7c可以看出,AdaBoost-PSO-ELM模型的預測效果遠遠優于BPNN和WNN模型。從圖7b、7d可以明顯看出,AdaBoost-PSO-ELM模型的預測誤差偏離零線最小,也說明本文提出的模型有更高的預測精度。5種預測模型的評價指標見表2。
從表2可以看出,在5種模型中,AdaBoost-PSO-ELM的各種預測性能評價指標值MSE、MAE和RMSE,均為最小,表示其性能最優。結果說明AdaBoost-PSO-ELM模型的預測精度相比于其它4種模型提高很大。

表2 5種預測模型的評價指標Tab.2 Evaluation indicators of five prediction models
2.2 增氧機控制規則庫構建結果
在已搭建的循環水養殖系統中,進行多組不同曝氣流量下的溶解氧增氧預實驗,記錄溶解氧質量濃度隨時間的變化曲線,如圖8所示。
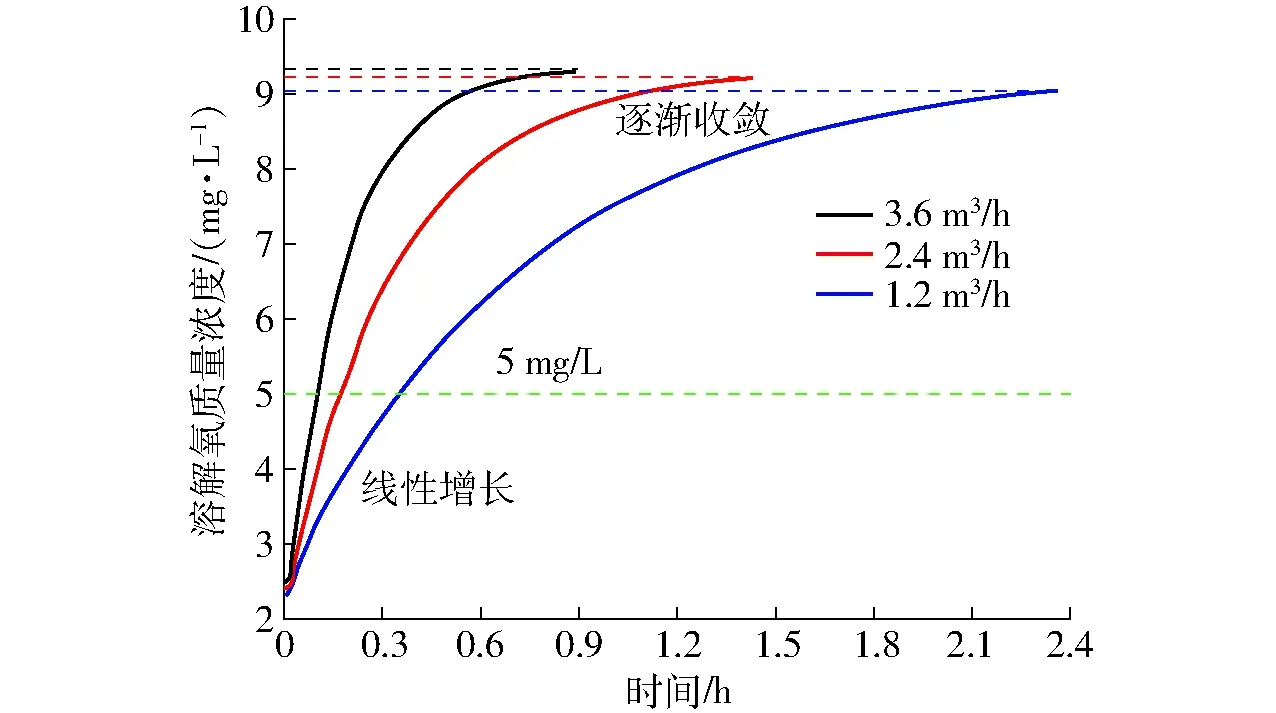
圖8 不同曝氣流量下的溶解氧增氧響應曲線Fig.8 Dissolved oxygen aeration response curves at different airflow rates
從圖8中可以看出,當水體溶解氧質量濃度較低時(5.0 mg/L以下),其上升速度比較快,基本呈線性增長,說明增氧效率比較高。當水體溶解氧質量濃度較高時,增氧曲線逐漸收斂,增氧效率開始下降。當溶解氧達到飽和時,無論曝氣流量多大,增氧效率基本為零。因此,結合溶解氧增氧響應規律,本文探索曝氣流量、溶解氧初始質量濃度與增氧機開啟時間之間的相互作用關系,為合理控制增氧機提供科學依據。
溶解氧質量濃度設定值根據實際情況設置,可以為溶解氧飽和質量濃度,也可以為養殖生物生長的最適質量濃度。本文以溶解氧質量濃度設定值為6.0、8.6 mg/L(飽和質量濃度)為例,選擇4種不同曝氣流量(0.9、1.8、2.7、3.6 m3/h)在不同溶解氧初始質量濃度下進行增氧實驗,記錄溶解氧達到設定值時增氧機的開啟時間,根據記錄的數據,分別選擇二次多項式和三次多項式作為先驗公式進行擬合,得到三維關系曲面圖,如圖9所示。
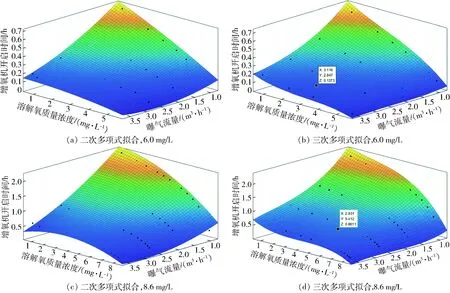
圖9 基于不同多項式的增氧能力擬合曲面Fig.9 Fitting surface graphs of aeration capacity based on different polynomials
從圖9中可以看出,當溶解氧初始質量濃度越低,曝氣流量越小,溶解氧質量濃度達到設定值所需的時間就越長。在相同曝氣流量下,溶解氧初始質量濃度越高,到達設定值時,增氧機開啟時間就越少。在相同初始溶解氧質量濃度下,曝氣流量越大,到達設定值時,增氧機開啟時間就越少。基于2種多項式的擬合結果如表3所示。
從表3可以看出,基于三次多項的擬合指標值均優于二次多項式。因此,為了提高控制精確度,本文選擇三次多項式對增氧能力進行精確量化,結果如圖9b、9d所示。其中,圖9b中標出的坐標點表示,當溶解氧初始質量濃度為2.847 mg/L,在曝氣流量為3.116 m3/h的持續作用下,養殖水體溶解氧質量濃度達到6.0 mg/L時,增氧機需要開啟0.137 3 h。圖9d中標出的坐標點表示,當溶解氧初始質量濃度為5.412 mg/L,在曝氣流量為2.931 m3/h的持續作用下,養殖水體溶解氧質量濃度達到8.6 mg/L時,增氧機需要開啟0.661 1 h。結果表明,曝氣流量、溶解氧初始質量濃度與增氧機開啟時間的關系已被精確量化。

表3 各種情況的擬合度評價指標Tab.3 Evaluation index of goodness of fit in various situations
根據三次多項式的量化結果,構建增氧機開啟時間控制關系規則庫。以溶解氧達到飽和質量濃度時(8.6 mg/L)為例,根據現場實驗數據和養殖經驗,將曝氣流量劃分為4個等級[QS,QM,QB,QL],分別代表[1.0,2.0,3.0,4.0] m3/h;將溶解氧質量濃度劃分為7個等級[DS,DM,DB,DL,DX,DY,DZ],分別代表[0~1.5,1.5~3.0,3.0~4.5,4.5~6.0,6.0~7.5,7.5~9.0,>9.0] mg/L;將增氧機的開啟時間劃分為8個等級[TC,TS,TM,TB,TL,TX,TY,TZ],分別代表[0,0.1,0.3,0.6,1.0,1.5,2.0,2.5]h。針對本文循環水養殖系統的增氧特點,并結合實際養殖經驗,可以歸納總結得出增氧機控制的經驗規則共28條,如表4所示。

表4 增氧機開啟時間控制規則表(1.4 m3水體)Tab.4 Control rules for working time of aerator (1.4 m3 water body)
2.3 基于增氧機控制專家系統的溶解氧調控結果
將本文訓練的溶解氧預測模型和構建的增氧機控制規則表寫入計算機監控中心可得到增氧機控制專家系統。專家系統可根據溶解氧預測值,通過制定的規則表,合理地向增氧機發送控制指令,實現溶解氧的合理調控。
根據表4的結果可知,當溶解氧處于較高等級時,如“DY”,優先讓增氧機以較小氣量(QM,QS)短時開啟,較大氣量(QL,QB)時不開啟,盡量減少噪聲對水產品產生的影響。當溶解氧處于最低等級時,如“DS”,則優先以較大氣量(QL)曝氣增氧,盡快提升水體溶解氧含量,避免缺氧現象發生。增氧機控制規則觸發時,專家系統優先以當前溶解氧含量決定增氧機曝氣流量,然后根據二者數值通過查表推斷出增氧機的開啟時間。
從以上敘述中可以看出,將溶解氧建模預測與增氧機控制規則庫結合起來可實現溶解氧含量的合理調控。在此基礎上,已制定的增氧機控制規則庫也可以為溶解氧自動控制和手動控制提供依據。
2.4 討論
基于AdaBoost的強預測器模型能夠根據預測誤差調整若干組弱預測器的權重,能夠把PSO算法隨機選擇交叉、變異優化后的ELM模型的不同預測結果組合起來,實現AdaBoost強預測器“優中選優”的優點,相較于ELM、PSO-ELM和傳統的神經網絡模型,不僅大幅度地改善了溶解氧含量的預測精度,同時也提升了模型的泛化能力。
本文通過進行不同曝氣流量下的增氧預實驗,對增氧機的增氧能力進行了量化,得出了增氧機開啟時間與溶解氧質量濃度以及曝氣流量之間的非線性關系,并結合實際養殖經驗,總結制定了一系列增氧機控制規則。但是由于實驗條件限制,所使用的增氧機型號較小,本實驗結論僅適應于小型魚缸養殖,后期工作應該對大型養殖水池進行探究。
傳統的溶解氧調控通常面臨控制精度不高,且能源損耗過大等問題,而本文提出的溶解氧調控方法將溶解氧含量預測模型與自建的經驗規則庫結合起來,不僅避免了基于閾值調控增氧滯后的問題,而且對系統整體硬件設施要求不高,有很大的應用前景。但是本文結論僅在實驗室理想條件下實驗得到,還沒有在實際現場應用驗證,后期工作應進行實際養殖工廠中的應用,以檢驗其可靠性。
3 結論
(1)通過采集溶解氧質量濃度、水溫、pH值和鹽度4種水質因子作為模型的輸入變量,訓練AdaBoost-PSO-ELM預測模型,能夠對1 h后的溶解氧含量進行準確預測。與PSO-ELM、ELM、BPNN和WNN模型相比,本文提出的模型有更高的預測精度,其評價指標MSE、MAE和RMSE均為最小,分別為0.005 5 mg2/L2、0.053 1 mg/L和0.074 5 mg/L。
(2)在循環水養殖系統增氧預實驗中,增氧機開啟時間與曝氣流量、溶解氧初始質量濃度之間的非線性關系明顯。基于此結果,采用三次多項式作為先驗方程對增氧能力進行了精確量化,闡明了三者之間的相互作用數學關系,并制作成增氧機控制關系規則表,為合理控制增氧機開啟時間與開啟功率提供依據。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
光學精密工程(2016年6期)2016-11-07 09:07:19
中國科技信息(2016年14期)2016-07-31 21:16:32