基于IAP15單片機的麥克納姆輪巡檢智能車設計
2022-08-05 07:23:00楊中興
傳感器世界 2022年4期
楊中興
遼寧建筑職業學院,遼寧遼陽 111000
0 前言
智能車的研究是移動服務機器人研究的一個重要分支,研究智能車控制系統的實時性和精確性具有重要的理論和實際意義[1]。隨著物聯網技術和人工智能的發展,智能技術的應用也越來越廣泛,以智能車為代表的智能移動設備不僅在工業智能化中得到了廣泛應用,而且在智能家居中也受到大家的青睞[2]。本文所設計的巡檢智能車采用麥克納姆輪實現全向移動控制,開發手機端應用程序實現對智能車的藍牙遙控,開發PS/2手柄遙控功能實現在WiFi環境下視頻圖傳。智能車的電控部分采用模塊化、積件化設計思路,主要包括電源板模塊、電機驅動模塊、主控單元模塊、視頻單元模塊等。本文從結構設計、硬件電路設計、軟件程序設計等方面介紹該巡檢智能車的設計方法。
1 智能車的結構設計
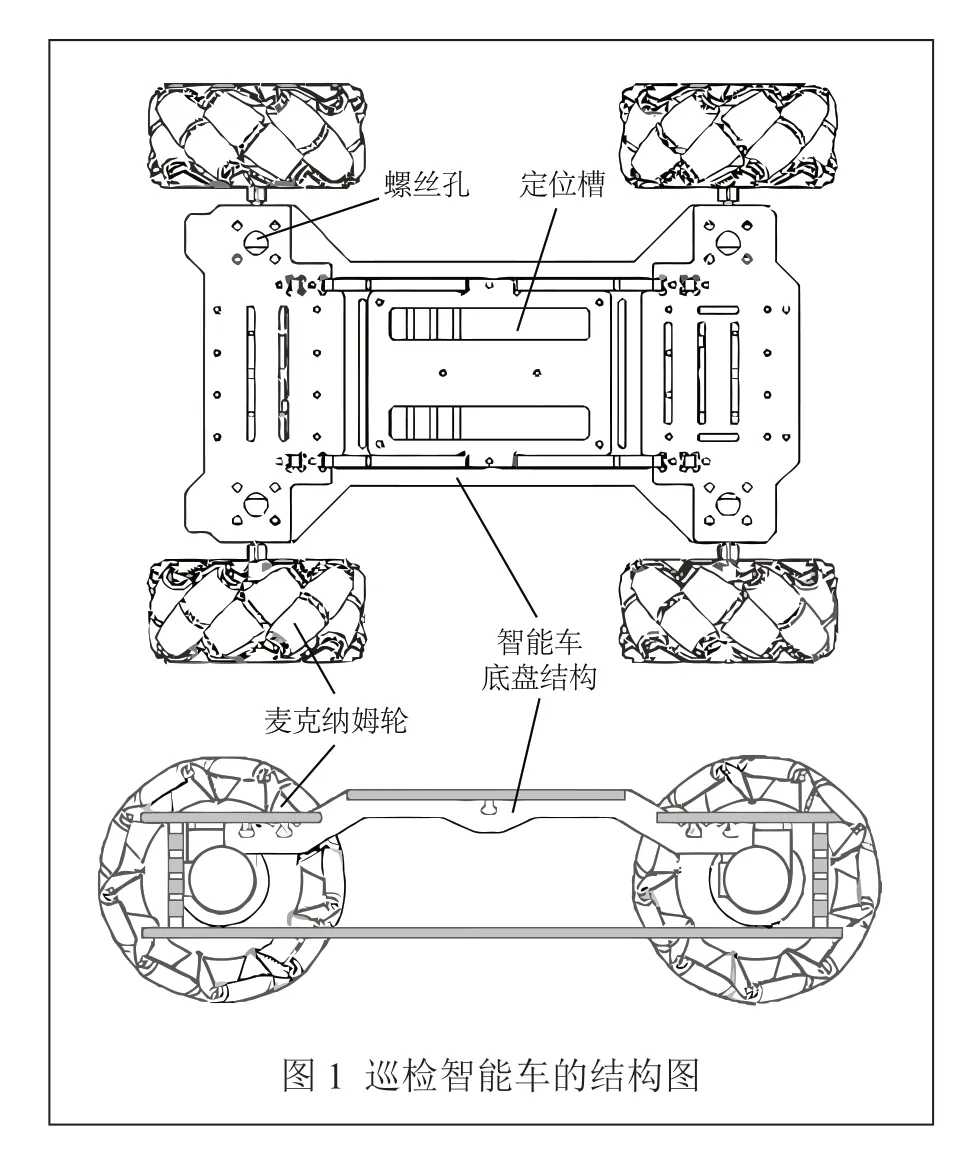
該智能車的底盤結構采用四驅加麥克納姆輪(以下簡稱麥輪)的設計,相對全向輪而言,麥輪可以通過其轉速和安裝方法來合成在任意方向的合力,所以它可以讓車全方向移動。基于麥輪技術的全方位運動設備可以實現前行、橫移、斜行、旋轉及其組合等運動方式。麥克納姆輪智能車非常適合在空間有限、作業通道狹窄的環境中應用。麥輪的車需要4個電機單獨驅動每個輪子,單獨驅動每個電機既能夠提供足夠的動力,更能夠獨立控制每個麥輪的轉向,形成多種轉向組合,從而實現小車的全向移動控制。智能車的結構圖如圖1所示。
2 硬件模塊設計
2.1 多路電源模塊
智能車離不開電源,電源的穩定、可靠是系統正常工作的前提。為使智能車能夠穩定工作,首先需要設計一塊多路電源模塊。該電源模塊需要提供以下幾路電源:(1)智能車電機回路供電電源:智能車所用電機額定電壓通常范圍是+5~12 V,電機不同,額定工作電壓也不同,為了使電源模塊更具有通用性,要求電機供電能夠實現電壓可調。智能車一般是雙電機或者四電機驅動,所以給電機供電至少需要提供雙路;(2)+5 V電源:+5 V是電路系統中最常見的電源電壓,是51系列單片機的工作電壓(宏晶公司新發布的IAP15系列單片機既可以工作在+5 V,也可以工作在+3.3 V),很多外圍器件也需要工作在+5 V,所以設計的電源模塊需要提供+5 V這一路電壓輸出;(3)+3.3 V電源:+3.3 V電壓是主流微處理器的工作電壓,也是藍牙模塊的工作電壓,相對+5 V供電,+3.3 V供電也能在一定程度上降低功耗,這對于鋰電池供電的智能車系統非常重要。
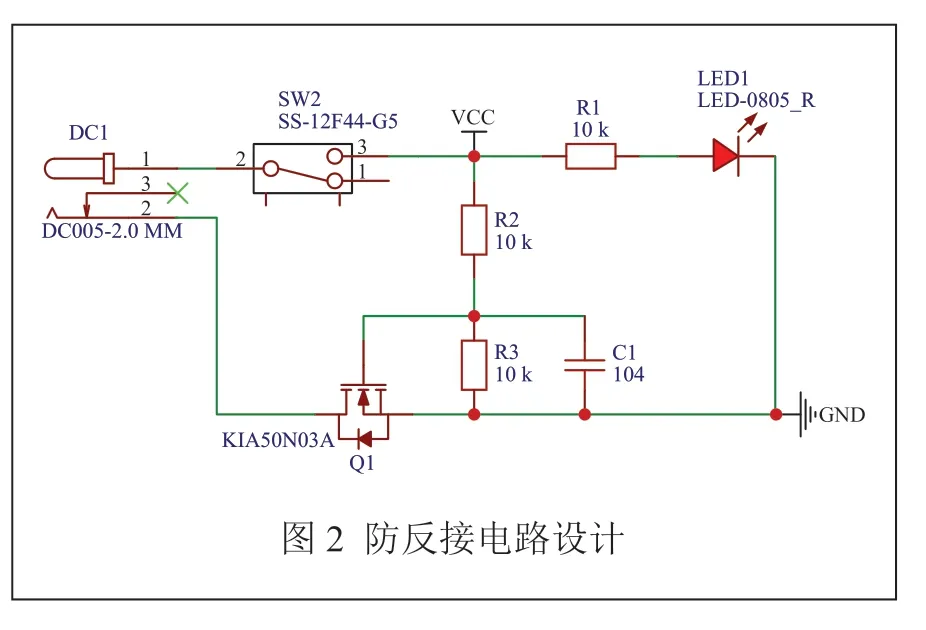
輸入電路還要考慮防反接問題。由于不能假定用戶每次使用都能正確連接外部電源,如果不小心接反,板子就會燒毀。合格的產品應該將用戶各種可能的不正確使用方法都考慮到,并且做出妥善的處理。防反接電路有很多,最簡單的防反接就是在正極加上一個二極管(比如1N4148)進行保護,電路簡單,成本低,占用空間小。但是二極管的PN結在導通時,存在一個小于0.7 V左右的壓降,對電路造成不必要的損耗,比如對電池供電的系統,電流較大的電路都會造成比較明顯的影響(電路中,功耗、發熱都是不可忽略的問題)。智能車采用鋰電池供電,對于鋰電池來說,0.7 V的壓降也是比較大的損耗,更好的選擇是采用NMOS管防護。電源防反接電路如圖2所示,上電瞬間,MOS管Q1的寄生二極管導通,系統形成回路,源極S的電位大約為0.6 V,而柵極G的電位為Vbat,MOS管的開啟電壓極為:Ugs=Vbat-Vs,柵極表現為高電平,NMOS的ds導通,寄生二極管被短路,系統通過NMOS的ds接入形成回路。若電源接反,NMOS的導通電壓為0,NMOS截止,寄生二極管反接,電路是斷開的,從而形成保護。
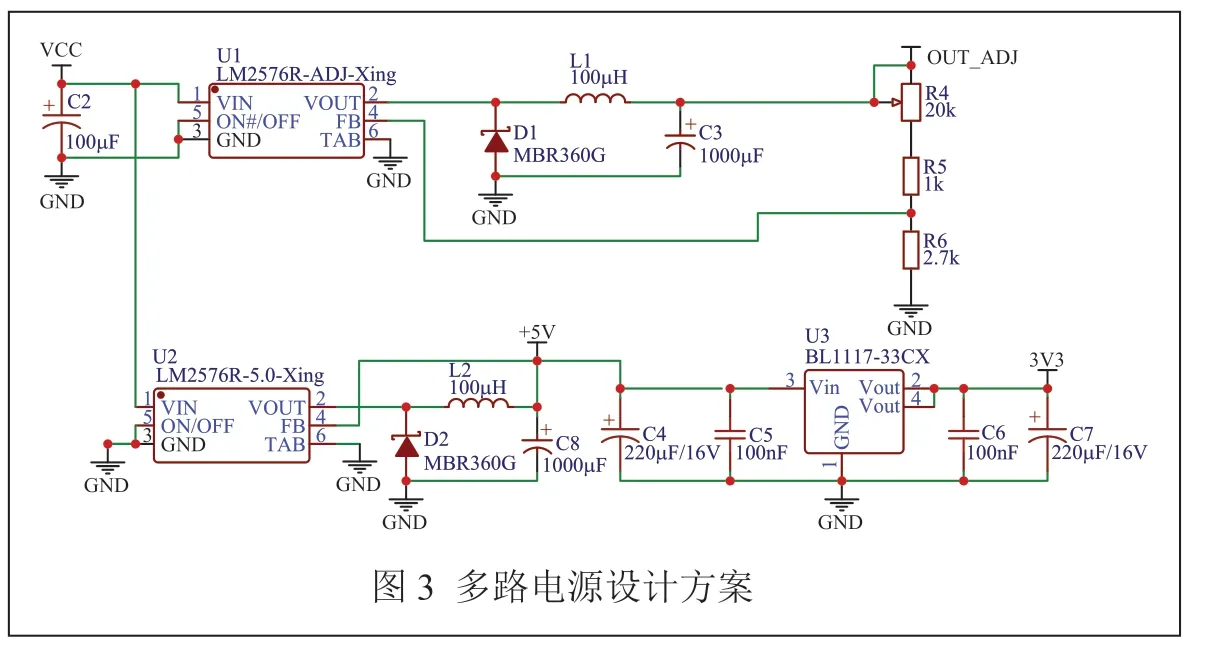
考慮到電機啟停時噪聲較大,故設計此多路電源供電方式,將電機供電回路和主控板供電回路隔離。多路電源電路的核心器件為LM2576-ADJ芯片,這是一款DC-DC芯片,可通過外接反饋電阻調節輸出電壓。多路電源設計方案如圖3所示,圖中上半部分電路使用LM2576R-ADJ芯片,通過外圍電位器R4實現可調電壓輸出,靈活適配不同電機的供電要求,此路電源主要是給電機回路供電。圖3下半部分電路使用LM2576R-5.0芯片,將外接電池電壓降到5 V,然后再接入BL1117-33CX芯片組成的LDO降壓電路,將5 V電壓降低到3.3 V,此路電源給單片機和主控電路供電。
2.2 雙路電機驅動模塊
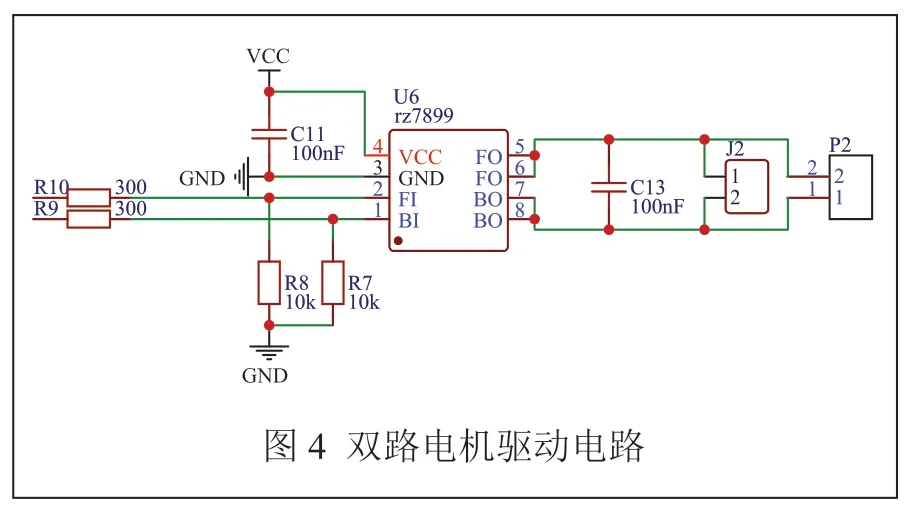
在智能車的電機驅動電路中,常用的有L298N、RZ7899、TB6612和SN754410芯片等設計方案,本設計中使用RZ7899方案。RZ7899 是一款 DC 雙向馬達驅動電路,適用于玩具電機驅動、自動閥門電機驅動、電磁門鎖驅動等。它有兩個邏輯輸入端子用來控制電機前進、后退及制動。該電路具有良好的抗干擾性,微小的待機電流,低的輸出內阻,同時,它還具有內置二極管,能釋放感性負載的反向沖擊電流。此外,該芯片還具有諸多優點,如微小的待機電流(小于2 μA)、工作電壓范圍寬3.0~25 V、緊急停止功能、過熱保護功能,以及過流、欠流保護及短路保護功能。雙路電機驅動電路如圖4所示,采用RZ7899芯片設計方案,在一塊電機驅動板上,做兩路輸出,即可實現雙路電機驅動功能。
R1、R2左側是控制電壓的輸入端,通過輸入端口4種不同的組合,控制電機前進、后退、停止和剎車4種不同的狀態。直流電機的兩項端子連接J2,C4為電機兩個觸點間連接的0.1 μF(104)濾波電容,該電容可以不焊接在電路板上,而是直接跨接在電機引腳的兩端。
2.3 單片機主控電路板
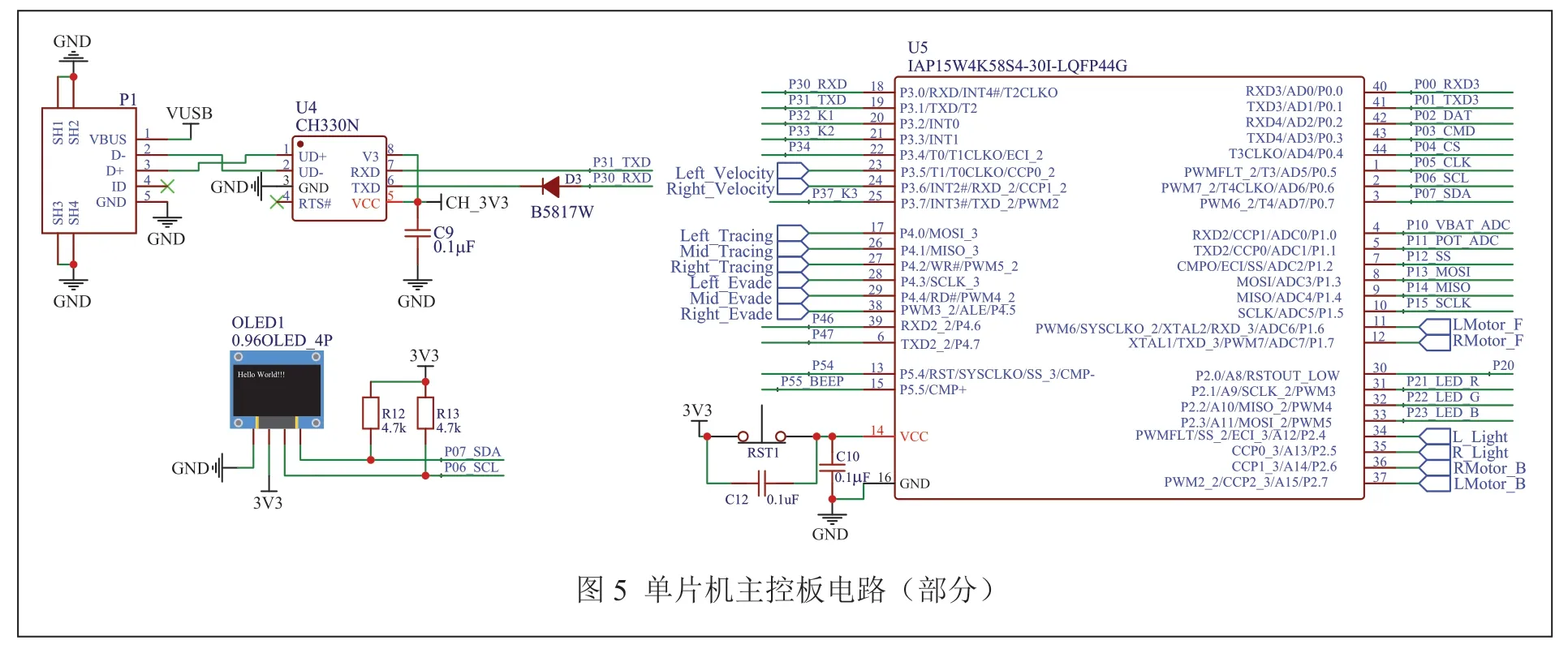
智能車主控板采用IAP15W4K58S4單片機進行設計,該單片機是增強型8051內核,每個機器周期只需要1個系統時鐘,速度比傳統8051快8~12倍;內部高精度R/C振蕩器,可省略外部晶振,內部時鐘頻率5~35 MHz可選;具有ISP/IAP功能,無需專用編程器和仿真器;5個16位可重裝初值定時器T0~T4,2路CCP可再實現2個定時器;8路PWM可以非常方便應用于智能車電機調速控制;多種模式的低功耗設計等,使其非常適合在智能車產品中應用。
實際應用中的單片機主控板電路比較簡單,主要由IAP15單片機構成的最小系統、USB轉串口電路、OLED接口電路及其他數量不多的外圍功能電路構成。部分主控電路圖如圖5所示。其中,USB轉串口電路采用CH330N方案,設計簡單,成本低廉,且完全滿足應用需要。
3 固件程序設計
智能車固件程序設計主要包括主程序流程、初始化程序、硬件設備的驅動程序、全向移動控制程序、信號檢測程序、藍牙遙控處理程序、PS手柄遙控解析程序、攝像頭圖像采集傳輸子程序模塊,采用C語言進行編程。除了智能車的固件程序,還有手機端的藍牙遙控App程序設計。
3.1 主程序模塊
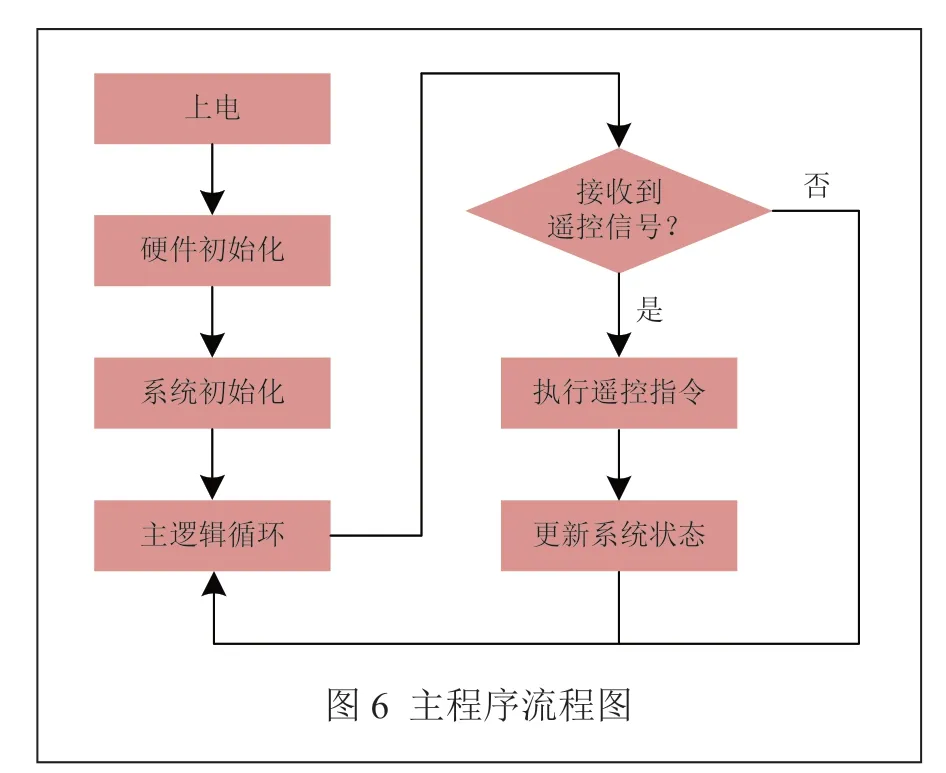
主程序流程依次調用各驅動程序完成硬件設置,調用初始化程序完成系統狀態的初始化工作,并進入主邏輯循環,進行信號檢測和遙控指令監聽,并根據信號和遙控指令進行相應的運動和狀態轉換。工作過程:初始化-檢測按鍵-啟動系統狀態機,流程如圖6所示。
3.2 電機控制模塊
智能車采用了4個直流永磁電機構成了四驅系統,每個電機單獨控制一個麥輪,由4個電機的不同轉動方向組合,可以實現前進、后退、左行、右行、左轉、右轉、左對角線移動、右對角線移動、左右原地旋轉等全向控制,以及停車、剎車等制動控制。四驅電機對麥克納姆輪全向運動的控制組合如表1所示。電機的轉速控制是通過調節PWM信號占空比來實現的,高電平占空比越大,電機轉動速度越快,如果占空比達到100%,速度將達到最快[3]。
3.3 藍牙遙控功能設計
藍牙遙控功能采用HC-05模塊,該藍牙模塊是主從一體的藍牙串口模塊。當2個藍牙設備配對連接成功后,可以忽視藍牙內部的通信協議,直接將藍牙當做串口用,實現藍牙串口透傳功能,當建立連接,兩設備共同使用一個串口通道,一個設備發送數據到通道中,另外一個設備便可以接收通道中的數據。HC-05藍牙模塊在使用前需要進行簡單的配置,配置過程使用上位機串口調試助手發送AT指令對藍牙模塊進行配置操作。實際設計中,使用IAP15單片機的串口2(UART2)連接藍牙模塊進行通信,并開啟串口2的接收中斷,實時監聽并處理藍牙遙控信號。

表1 四驅電機控制麥克納姆輪全向運動組合情況(↑前轉、↓后轉、 停止?剎車)左前輪 左后輪 右前輪 右后輪前進 ↑ ↑ ↑ ↑后退 ↓ ↓ ↓ ↓左平移 ↓ ↑ ↑ ↓右平移 ↑ ↓ ↓ ↑左前移 ↑ ↑右前移 ↑ ↑左后移 ↓ ↓右后移 ↓ ↓原地左旋轉 ↓ ↓ ↑ ↑原地右旋轉 ↑ ↑ ↓ ↓左轉彎 ↑ ↑右轉彎 ↑ ↑停車剎車
3.4 PS/2遙控手柄驅動程序設計
PS/2手柄由手柄與接收器兩部分組成,手柄主要負責發送按鍵信息,接收器與單片機相連,用于接收手柄發來的信息,并傳遞給單片機,單片機也可以通過接收器向手柄發送命令,配置手柄的發送模式。手柄驅動程序主要包括:手柄初始化程序PS2_Init()、手柄發送子程序PS2_Cmd()、讀取手柄數據子程序PS2_ReadData()、手柄按鍵數據處理子程序PS2_DataKey()、獲取搖桿模擬量子程序PS2_AnalogData()、發送模式設置PS2_TurnOnAnalogMode()和振動模式設置PS2_VibrationMode()等子程序。單片機端在主邏輯循環中不斷讀取手柄接收器數據和狀態,如果獲取到手柄遙控指令,則進行相應的處理和執行。
3.5 手機端App程序設計
手機端App通過手機藍牙連接智能車的藍牙模塊,實現對智能車的遙控功能。手機端程序采用AppInventor進行開發。App Inventor是一個在線開發的Android編程環境,其程式代碼編寫過程使用積木式的堆疊法,適合快速開發手機App程序原型,進行產品功能的快速驗證。App Inventor在界面美化上會有一些限制,但是對于簡單的應用是足夠的。界面設計如圖7所示。

4 應用效果
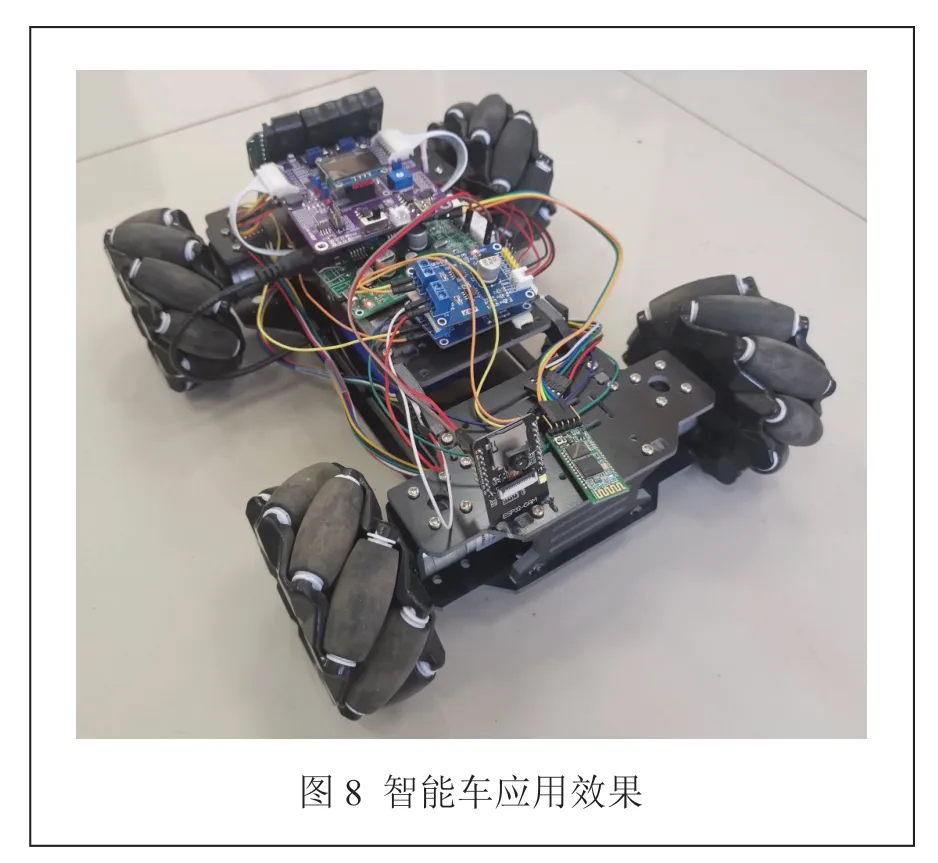
智能車應用效果如圖8所示。將智能車上電初始化后,打開手機端小車遙控程序,通過連接藍牙按鈕選擇HC-05藍牙并進行連接,待手機與車載藍牙連接成功后,就可以通過相應的功能按鍵控制小車的運動,并可以通過語音控制按鈕實現語言遙控。除了藍牙遙控,智能車還配備了PS/2手柄遙控接收端,通過手柄可以更加靈活方便地遙控智能車全向運動。前端的車載攝像頭可以查看智能車前方影像。該智能車在實際應用中運行穩定,響應及時,可完成特定范圍內的巡檢任務,具有較好的應用前景。
5 結束語
本文以增強型51內核的IAP15單片機為主控制器,設計了一種具有無線藍牙遙控、PS/2手柄遙控、WiFi視頻傳輸、麥克納姆輪全向移動等功能的巡檢智能車,分別從多路電源模塊、雙路電機驅動模塊、智能車主控模塊等方面介紹了智能車硬件電路設計,從全向移動控制、無線藍牙遙控、手機App程序等方面介紹了智能車固件程序設計。整車采用模塊化設計,其結構簡單,實現容易。新型的麥克納姆輪車在一些復雜路段中比傳統輪車更加靈活[4],在智能巡檢、工業生產、物流運輸等領域都有很大的實用價值。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
表面工程與再制造(2019年6期)2019-08-24 06:40:04
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
電子制作(2018年12期)2018-08-01 00:48:04