基于STM32 的尋寶旅游機器人小車設計
2022-08-06 10:14:16程苡凡劉文飛白煥鑫
科技創(chuàng)新與應用 2022年22期
關鍵詞:設計
程苡凡,劉文飛,白煥鑫
(臺州學院 航空工程學院,浙江 臺州 318000)
在智能化技術不斷發(fā)展的年代,智能化是現(xiàn)代技術發(fā)展的趨勢,智能尋寶旅游小車可以代替人力穿越險境、去指定的寶物所在地點勘測、尋寶,同時也可以應用在其他領域,具有極高的研究價值。2020 年浙江省第五屆大學生機器人競賽要求,設計并制作一輛在規(guī)定時間內,穿越險境、去隨機指定的寶物所在景點尋寶,同時游歷盡量多的景點,通過識別景點圖像到達指定景點,同時兼具爬坡、避障、跨越門檻、識別及定位、快速和穩(wěn)定完成規(guī)劃路線的能力的尋寶旅游機器人小車。
1 總體方案設計
浙江省大學生機器人競賽要求設計的智能機器人小車需具有自動定位、尋跡、避障、跨越門檻、上坡和下坡、路徑規(guī)劃、讀取識別圖像及形狀以及作出指定動作等功能,根據(jù)此要求,對機器人小車各功能模塊進行自主設計。材料主要采用2 mm 的鋁板,主體結構大致分為4層:底板、主控板、驅動板和樹莓派。電源為24 V 的航模電池,通過19 V 穩(wěn)壓模塊給電機供電以及5 V 降壓模塊給樹莓派供電。主控芯片為STM32F103ZET6,圖像識別采用樹莓派+OpenCV+200 萬像素攝像頭。動力方面采用24V900 轉直流電機(100 kg·cm)+2 路大功率,輪胎為直徑、摩擦力較大的駝峰胎。尋跡方面則依靠12 路數(shù)字灰度傳感器。為了保持機器人小車與場地之間的距離加了合頁和輔助輪,并用6 個光電傳感器來確定車身位置和彎道位置。再用3 個舵機充當頭和手臂,方便完成指定動作。總體方案如圖1 所示。
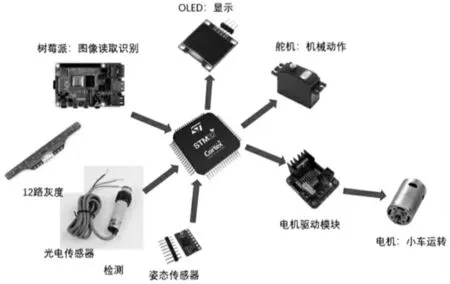
圖1 總體方案圖
2 硬件設計
2.1 主控模塊設計
主控芯片上選擇了STM32F103ZET6,引出了TIM3 的4 個通道輸出PWM 波形用來控制電機驅動。帶有兩路的編碼器正交解碼輸入接口,采集編碼器發(fā)送回來的數(shù)據(jù)。引出串口,連接樹莓派,在調試過程中發(fā)送數(shù)據(jù)給電腦串口,方便調試及數(shù)據(jù)監(jiān)控。外接了TIM5 的3 個通道用來控制舵機,以及6 個光電開關的引腳滿足路口的線路檢測和外部需求。
2.2 電源模塊設計
該機器人小車以24 V 航模電池為電源,利用穩(wěn)壓器將24 V 電壓穩(wěn)定在19 V 后,分別并聯(lián)電機驅動、PCB 控制板用作供電,其中的PCB 板通過LM2596S 模塊將輸入的電壓降至5 V 后再給電路板上的其他模塊供電。
2.3 電機驅動模塊設計
在電機驅動方面,機器人小車采用四個直流電機實現(xiàn)移動的功能,其中,電機的型號為24V900 轉直流電機(100 kg·cm)+2 路大功率,重量172 g,額定參數(shù)24 V,最大扭矩100 kg·cm,通過調節(jié)PWM 占空比來實現(xiàn)對于轉速的控制,進而通過給定兩側輪間差速來實現(xiàn)轉彎、掉頭功能。同時,電機驅動又采用了大功率的隔離電機驅動模塊,以至電機可以頻繁正反轉而不損壞驅動,且使用簡便,僅僅需要將電機正負線連接到驅動,驅動IN1-IN4 再分別連接STM32F103ZET6 的PWM 輸出IO 口就可以實現(xiàn)PWM 信號控制。
2.4 尋跡模塊設計
機器人小車的尋跡主要是根據(jù)地圖中分布的白線移動的,在一些特定的位置根據(jù)邏輯判斷實現(xiàn)定位停車。
本機器人小車尋跡主要分為兩部分,第一部分是白線位于小車中間的尋跡,主要利用到了12 路灰度尋跡模塊。該尋跡模塊靈敏度較高,一般光源無法影響,只要有顏色差即可,比普通紅外傳感器抗干擾能力要強得多。灰度傳感器上的12 盞高亮白色聚光LED 燈通電后發(fā)射光照射到地面上,經過不同地面的反射后,其中的光敏電阻會根據(jù)返回光強來改變電阻大小。因為地圖的顏色不同,調節(jié)灰度傳感器的靈敏度后可實現(xiàn)在白線上返回高電平,綠色區(qū)域返回低電平,STM32會根據(jù)返回的高低不同電平來改變電機的轉速從而實現(xiàn)尋跡功能。第二部分是兩條紅線位于小車兩側,小車位于兩條紅線之間的尋跡,利用左右兩側的光電傳感器實時檢測小車相對于紅線的位置,光電傳感器的原理類似于灰度傳感器,一旦檢測到小車位于紅線邊緣,STM32 也會根據(jù)返回的高低電平來改變兩側輪間差數(shù),從而實現(xiàn)路徑糾正,實現(xiàn)走中間尋跡功能,使其能夠解決小車在通過獨木橋、蹺蹺板以及斜坡、上下坡等的路徑糾正問題。
2.5 樹莓派模塊設計
樹莓派4B 是一款以Cortex-A72 為架構的微型嵌入式計算機,具有強大的運算性能。此外,它的體積十分小巧,尺寸僅為88 mm×58 mm×19.5 mm 大小,非常適合小型便攜式智能終端設備。并且處理數(shù)據(jù)效率高,不易出錯,滿足我們對圖像識別的要求,因此我們選擇用它安裝python-opencv 并搭載200 萬像素攝像頭實現(xiàn)各個景點圖像的讀取,圖像形狀的識別。
2.6 舵機模塊設計
由于機械手臂和頭部的所需動作簡潔且快速,因此我們選擇MG90S 模擬舵機,舵機型號為尺寸22.8 mm×12.2 mm×28.5 mm,重量13.6 g,轉動角度180°,死區(qū)設定5 μm,工作電壓4.8~6 V。它兼?zhèn)浯笈ちΑ茸栊 ⒎磻臁⒔嵌葴蚀_等特點。工作過程中,PCB 控制板通過降壓后的5 V 供電,與STM32 串口通信,小車到指定位置后單片機發(fā)送訊號給舵機,從而達到控制機械手臂和頭部執(zhí)行指定動作的效果。
3 機械結構設計
機器人小車機械結構分為底板設計、輔助輪支架設計以及人形支架設計三部分。
底板設計整體采用了矩形結構設計,在底板的中間兩端各伸出一個流線型接口,符合空氣動力學。在減小氣流阻力的同時,又為光電傳感器提供了安插口。底板正前端彎折出一對直角臺階,降低整體車型的重心以及輔助輪支架到車身的高度;連接輔助輪支架的合頁安置在底板上,控制支架角度并始終與地面接觸,增強循跡穩(wěn)定性、可靠性。底板四周鏤空若干孔位,為整車的排線留有余地,增加容錯、減小底板重量。
輔助輪支架設計在輔助輪支架上裝載的傳感器有兩個光電開關,12 路灰度傳感器和兩個輔助輪,采用合頁與小車底板相連,通過旋轉副實現(xiàn)兩個輔助輪的上下擺動,按提前設置的高度貼合地面,以確保灰度傳感器的正常工作,保證小車正常循跡,同時輔助輪靈活的上下擺動解決了小車過減速板的難題;裝載在灰度傳感器兩側的光電用于過獨木橋、蹺蹺板和黑色斜坡的尋跡,尋跡支架的設計給這兩個傳感器的安裝提供了一個高效發(fā)揮作用的位置。
人形支架裝在主控板兩端,多個光電開關安裝在車身四周,適用于賽道需求。
4 軟件設計
4.1 電機控制單元
電機控制單元采用了STM32 的TIM3 定時器PWM 輸出功能實現(xiàn)控制4 個直流電機,單片機內部進行PID 算法的運算,得到輸出所需要的速度,PWM 的波形采用了10 kHz 的頻率,通過調節(jié)占空比來控制輸出的PWM 波,從而控制電機的速度,這種調節(jié)占空比的方式雖然可以滿足基本的電機控制,但是由于存在電壓和實際路況等不穩(wěn)定因素的影響,電機的速度會莫名地發(fā)生變化。因為存在穩(wěn)定控制電機速度的難題,我們采用了增量式PID 控制算法,增量式PID 控制算法相比較于位置式PID 算法,增量式算法不需要進行累加計算,控制量的增量僅僅和最近幾次的偏差值有關,計算誤差對控制量的計算影響比較小。而位置式算法要用到過去的偏差值的累加值,易產生較大的累加誤差。因此,每當執(zhí)行機構需要控制量的時候,可以使用增量式PID 控制算法進行控制。控制器不是提供位置量的絕對數(shù)值,而是增量。為了改善系統(tǒng)的動態(tài)和靜態(tài)指標,可以調節(jié)調節(jié)器的比例系數(shù)Kp、積分時間Ti、微分時間Td 和采樣周期Ts 的具體數(shù)值來完成控制器參數(shù)整定,使其特性和過程特性相匹配,取得最佳的控制效果。PID 計算公式如下所示。
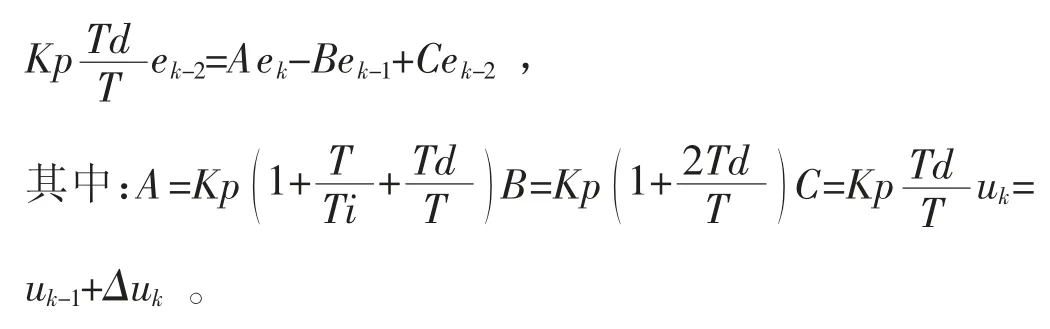
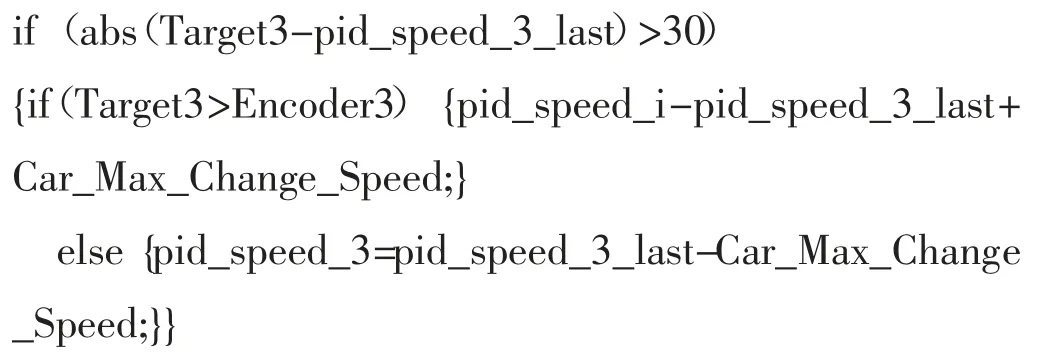
對PID 參數(shù)進行整定后,可以得到不同的速度控制曲線。不限幅速度控制曲線(圖2)的控制精度雖然已經足夠高,但偶爾會出現(xiàn)超調現(xiàn)象,PID 的超調量主要在第一個波形中起作用,即由低速突然加速到高速的過程中會出現(xiàn)很大的超調,不能達到預想的加速效果,超調反映的是控制系統(tǒng)在達到穩(wěn)態(tài)前控制作用最糟糕的結果。我們希望超調越小越好;超調越小,穩(wěn)態(tài)時間越長。在調試的過程中,加速的時候如果加速度過快,就會發(fā)生前輪上翹,同樣在剎車時會出現(xiàn)后輪上翹。要使在保證速度的前提下,又能解決問題,我們多次嘗試并發(fā)現(xiàn)了在保持KP 不變的情況下增大KD 值去抑制過調量同時對每次增量進行限幅,這樣既能達到一定的平緩速度,又能保證每次增加的速度穩(wěn)定。但如果把KP 調小去解決加減速過快的問題,就會發(fā)現(xiàn)響應速度又受到嚴重的影響。限幅代碼如下:
圖2 不限幅速度控制曲線
限幅后的速度控制曲線(圖3)十分平穩(wěn),又能夠響應速度,完全足夠達到理想的控制效果。
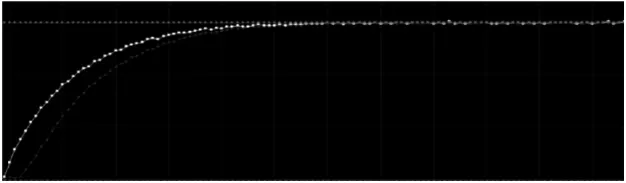
圖3 限幅后速度控制曲線
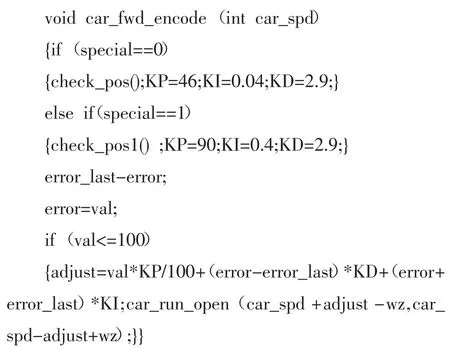
4.2 圖像及形狀識別單元
對于圖像信息的采集和處理,識別單元采用了樹莓派4B+OpenCV+200 萬像素攝像頭,首先,將比賽的圖片特征數(shù)據(jù)提取出來,建立模型,命名為對應景點的編號,保存到樹莓派內的一個文件夾,即進行圖像的預處理。然后單片機發(fā)送“拍照”信號給樹莓派,啟動攝像頭開始拍照,接著使用SIFT 算法檢測圖像的關鍵點和描述符,并與比賽圖片對比、匹配特征點,計算統(tǒng)計相匹配的特征點個數(shù),輸出匹配數(shù)目最多的圖片所對應的景點編號,轉化為字符串后發(fā)送給單片機,單片機內通過串口中斷,如果接收到內容,判斷是否為圖像內容,若是,則讓任務顯示裝置逐位顯示。為了防止小車未到景點而已經識別到圖像,只有在到達景點平臺時,樹莓派內程序才會自運行控制攝像頭開啟。
4.3 尋跡單元
4.3.1 白線尋跡
白線尋跡使用的是12 路灰度尋跡模塊,由于定時器的中斷函數(shù)的存在,傳感器每隔5 mm 檢測當前小車相對于白線的位置,并以高低電平信號反饋回STM32,同時在尋跡的程序中使用了PID 閉環(huán)控制,為了防止小車在偏離直線后,還能夠迅速、準確地返回原來的路徑。12 路灰度尋跡部分程序,尋跡位置式PID控制的部分程序如下所示。
4.3.2 兩側紅線糾正路線
兩側紅線糾正路線是通過檢測安裝在小車四周的光電傳感器,當檢測到小車邊緣靠近紅線時,STM32 給定小車的左右輪子一定的差速,使其實現(xiàn)路徑糾正。
5 機器人小車實物圖(圖4)
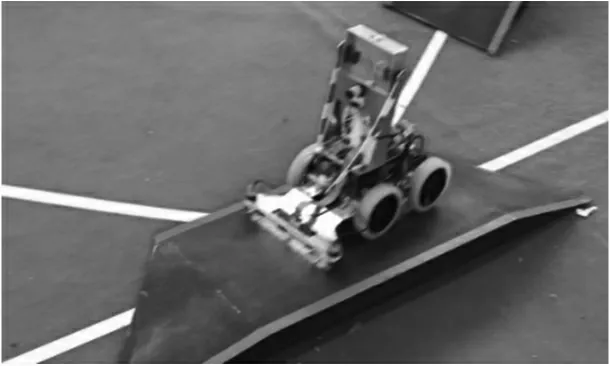
圖4 機器人小車實物圖
6 結束語
本文設計并制作了一輛智能尋寶旅游機器人小車,包含實現(xiàn)尋跡模塊、電機驅動、樹莓派的圖像與形狀識別、姿態(tài)傳感器、舵機控制等功能的軟硬件設計、小車的電機控制以及尋跡功能都加入了PID 閉環(huán)控制,在能夠實現(xiàn)更精確的移動控制的同時,穩(wěn)定、快速地完成在規(guī)定時間內穿越險境、去隨機指定的寶物所在景點尋寶,并游歷盡量多的景點的任務。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
