旱地作物機械化移栽關鍵技術研究現狀與發展趨勢*
2022-08-12 02:29:08張妮張國忠王姣李碩盧麗君董昭
中國農機化學報 2022年8期
張妮,張國忠,王姣,李碩,盧麗君,董昭
(1. 武昌首義學院機電與自動化學院,武漢市,430064; 2. 華中農業大學工學院,武漢市,430070)
0 引言
移栽又稱移植,是將已培育好的幼苗移栽到大田的一種農藝,可增加土地復種指數,大幅提高作物產量及品質,機械化移栽可提高種植質量且降低生產成本[1]。采用移栽方式種植的旱地作物有糧食作物、經濟作物和藥用作物等三類,其中糧食作物有玉米等,經濟作物主要有棉花、蔬菜、煙草、油菜等,藥用作物有丹參等。以上三類相比而言,移栽種植方式在經濟作物的運用最為廣泛。
中國現階段機械化移栽技術的研究起步較晚,目前市場上尚沒有成熟的機型應用。以蔬菜種植為例,中國蔬菜產量約占世界蔬菜總產量的60%,2020年設施蔬菜種植面積達4 200 khm2,約有60%的蔬菜是采用育苗移栽種植,但機械化程度不高,目前仍以人工移栽為主。現有機械大多引進或仿制國外產品,其總體保有量較少,主要原因在于采用機械移栽作業時存在效率低、成本高、傷苗、易漏栽等問題,成為制約移栽機械化發展的關鍵因素,提高自動化移栽機發展水平迫在眉睫[2-4]。
機械化移栽主要包括前期的育苗準備階段,苗盤輸送、夾苗取苗、補苗與栽植等環節,文章闡述機械化移栽環節中這些環節的關鍵技術研究現狀以及吊杯式、導苗管式、鏈夾式及撓性圓盤式移栽機的研究現狀及市場應用情況,對旱地作物機械化移栽技術與裝備研究發展趨勢進行了分析,可為機械化移栽的深入研究和進一步發展提供參考。
1 機械化移栽關鍵技術研究現狀
1.1 育苗質量及秧苗移栽特性
育苗是移栽的準備環節,目前育苗方式主要有穴盤缽體苗、裸苗、毯狀苗和基質塊苗[1]。為給機械化移栽提供理論基礎依據和解決送取苗過程中存在的問題,專家和學者針對不同作物幼苗的生長質量、力學物理特性參數以及與送取苗裝置的適應性進行試驗研究。
在幼苗生長質量研究方面,對不同幼苗的長勢參數評價指標有苗株高、株干鮮重、莖粗、莖葉鮮重、葉片理化性,根系根長、活力、體積質等[5-8]。張碩等[5]分別通過試驗得出黃瓜苗的株高、莖粗和植株干鮮重受基質成分和配比影響顯著;黃瓜苗的根系根長、根體積受基質類型、配比、壓實度影響大;黃瓜苗的株高、莖粗和莖葉鮮重與施肥時營養液濃度相關。朱傳霞等[8]研究油菜生長過程中葉片理化性質和根系活力受不同硼硒營養液濃度影響大。
在秧苗力學物理特性參數方面,為提高取苗機構抓取可靠性,童俊華等[9]研究得出適當的缽苗夾持角度、取苗爪結構以及基質成分配比可提高抓取成功率。金鑫等[10-12]研究得出機械移栽時缽體破損率、取苗成功率主要受缽苗的基質配比和力學性能、取苗裝置取苗角度、速度及夾取力影響。針對油菜方形壓縮基質塊苗的基質易出現破損問題,胡喬磊等[13]進行試驗研究,得出基質塊苗在特定的成分配比、壓實度、營養液濃度以及特定的傳送速度和取苗頻率的條件下移栽效果最佳。韓綠化等[14]以黃瓜穴盤苗對象,針對夾缽過程中缽體的力學特性開展試驗研究,得出缽體抗壓能力隨夾取的深入越來越強,夾緊力的最佳取值可超過生物屈服點;夾取部位應位于根系緊密區,可減少缽體破損率。
綜上,基質成分配比、壓實度及營養液濃度等是影響缽苗力學特性及幼苗生長質量的主要因素,從而顯著影響移栽質量。缽苗力學物理特性的試驗研究可利用質地分析儀和測力裝置,開展夾持力試驗、碰撞試驗和基質壓縮等試驗,分析力學規律或構建力學模型,如:苗莖稈破斷力,缽體Burgers模型蠕變特性,缽體抗壓特性,缽體脫盤阻力特性等,并根據移栽的夾取方式不同(夾缽式或夾苗式),選取不同的試驗方式,通過試驗優化獲取移栽機末端夾取器的形狀、結構、材質、夾取部位、角度和深度等參數。
1.2 苗盤輸送技術
苗盤輸送是實現自動化移栽的重要技術環節[15],目前國內研究略顯不足,現有研究分三類:機械式、機電氣聯動、機器視覺。其中較多地采用機械式,利用橫向和縱向間歇送盤,同步協調工作,定位精度受制于零部件累計誤差[16]。機電氣控制聯動式,一般由步進電機或步進氣缸,PLC控制系統、位置傳感器,輔助定位機構、同步帶或傳動鏈等組成,靠步進電機或氣缸驅動同步帶移動,產生的脈沖信號控制苗盤移動。機器視覺可識別空穴,但由于成本較高且對振動敏感,主要應用于溫室穴盤的平面二維定位。
國內研究多集中在第二類機電氣聯動。崔魏等[17]基于齒輪五桿機構獲得取苗爪運動軌跡設計出精準橫向、縱向間歇送苗機構,實現精準取苗。國外生產的RTW系列移栽機[18],其輸送系統采用寬輥道,可同時移栽四盤秧苗,由氣缸驅動方式推送苗盤,輸送系統效率較高。日本研制PT6000型移栽機器人[19],苗盤輸送裝置將幼苗輸送到拔苗器下方,光電傳感器可檢測識別是否缺苗,控制系統為單點觸摸式控制面板,且帶有自診斷裝置,若無缺苗則進行幼苗定點取放,該移栽機器人智能化程度較高。
綜上所述,為提高效率,整排式取苗為今后研究趨勢;輸送過程中的精準定位、準確供苗是實現移栽機送苗自動化的關鍵技術,特別是大田試驗中由于機構本身和行走振動,對持續精準定位和供苗是較大的考驗。國外移栽機智能化程度較高,但結構和控制系統復雜,成本高,較難適應我國的中小型種植規模。
1.3 夾苗取苗技術
國內對夾苗取苗機構的研究較多集中在取苗執行機構和夾苗末端執行器兩方面。
許博等[20-21]針對油菜紙缽苗移栽機開發出氣動插入,多桿式聯動取苗機構,如圖1所示,末端執行器采用兩根取苗針插入式,臺架試驗的取苗成功率為92%。王蒙蒙等[22-23]設計的蔬菜移栽機采用了曲柄擺桿式夾苗機構,性能試驗結果為缽體破碎率為4.2%,綜合取苗成功率為95.8%。童俊華等[9, 24]穴盤移栽末端執行器的選擇上分別采取了指針式和指鏟式兩種方式對苗缽基質進行抓取。并通過離散元模擬基質在穴盤孔中的自然沉降,通過仿真試驗分析不同含水率和基質配比下受力的變化情況。試驗得出最佳含水率為60%、基質配比為6∶3∶1時對劣苗的缽體基質平均剔凈率為70.8%。
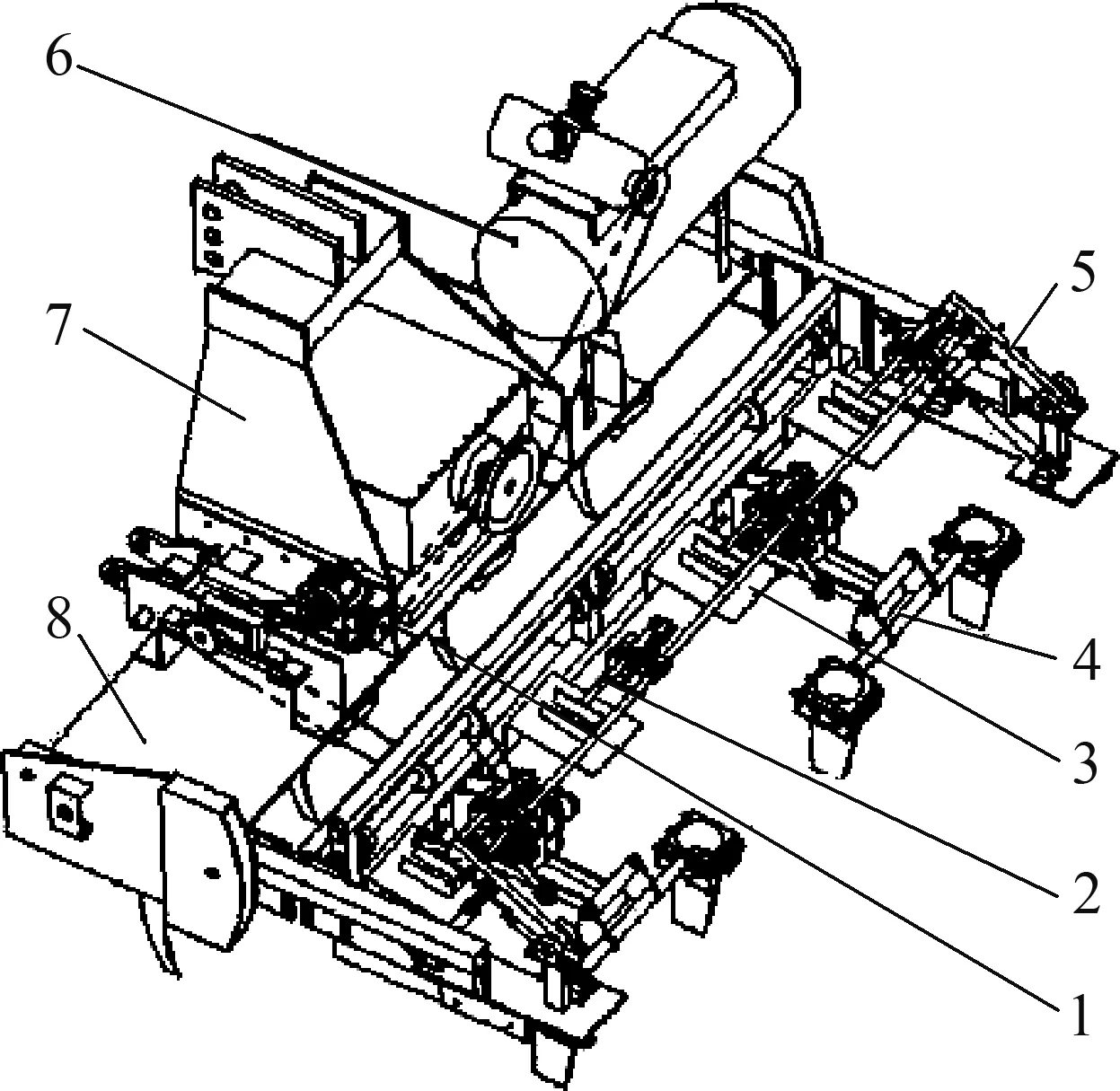
圖1 油菜紙缽苗移栽機Fig. 1 Rape paper pot seedling transplanter1.旋耕裝置 2.取苗末端執行器 3.缽苗放置裝置 4.栽植機構 5.取苗機構 6.空壓機 7.懸掛裝置 8.機架
蔣卓華等[25]鑒于常規插拔式和夾取式設計出插拔夾取式末端執行器,采用單氣缸驅動,通過試驗得出一定的基質配比、含水率、單株基質質量下,移栽成功率達到100%,基質塊的損傷率為17%。梁喜鳳等[26]設計的補苗末端執行器工作對象為嫩小子葉缽苗,取苗和補苗成功率均為100%。潘杰等[27]設計指夾式取苗爪,基于EDEM-RecurDyn進行優化,試驗得出取苗成功率96%以上,缽體破碎率為0。韓綠化等[28]設計出用于鉗夾式移栽機的兩指四針取苗末端執行器,試驗得出苗缽含水率水平顯著影響根土破壞,而入缽角度、深度及根系等因素對根土破壞無顯著性影響。韓豹等[29]設計的針式末端執行器采用四根插入針,針之間間距可調,由直流電動推桿驅動,以缽體完整性為目標用離散元模擬仿真試驗統計了脫落在穴孔內的顆粒質量,分析了加速度、穴盤規格、邊距比對基質顆粒脫落的影響,試驗得到缽體完整率為97.97%,取苗失敗率為0.81%。上述文獻中,童俊華等[9, 24]運用離散元仿真,分析取苗過程中苗缽體的物理特性,為夾苗取苗機構設計的優化提供了較為深入的理論基礎,其研究手段值得借鑒。
國外夾苗取苗機構的研究起步較早[30],Choi等[31]研發的自動取苗機構為固定滑道式,驅動方式采用多桿機構,驅動桿為曲柄,連桿帶著穴盤苗移動,滑塊上安裝有2個取苗針,取苗針的位置和姿態由搖桿和滑道控制,取苗成功率為97%;Ryu等[32]研制的取苗機構為直線滑臺式,采用氣缸驅動,取苗成功率為98%左右。
綜上所述,現有夾苗末端執行器,根據夾取部位分夾缽式和夾苗式兩種;根據夾取末端結構有針式、鏟式等;根據取苗動作可分為夾取式、插拔式、頂出式及復合式,其中插拔式一般是插入到缽體基質深處,動作的選取對于缽苗的損傷至關重要,應結合取苗機構,分析其受力原理選取適合的方式[33]。取苗中存在的主要問題在于取苗裝置對缽苗損傷率高,作業效率不夠高,通用性和自適應性差。臺架試驗性能效果較好,但由于田間環境復雜得多,田間試驗性能往往不夠穩定,故研發周期拉長,市場應用開發進展較慢。
1.4 補苗及栽植技術
溫室苗盤自動補苗環節的研究主要集中在缽苗視覺識別和作業路徑規劃。吳儉敏等[34]進行了苗盤缽苗自動識別研究,將移栽機的漏栽率降到了12%;賀磊盈等[35]基于貪心遺傳算法對穴盤苗補苗路徑進行優化,得出該算法所規劃的補苗路徑比全遺傳算法可縮短33.8%~41.3%;楊振宇等[36]利用機器視覺檢驗缽苗的直立度和高度,用以判斷是否適栽;童俊華等[37]針對溫室穴盤缽苗稀植移栽分別作了基于遺傳算法和貪心算法的移栽路徑優化。王永維等[38-39]通過獲取穴盤苗的圖像并進行缺苗檢測,判定正確率為100%。
栽植機構按原理可分為開苗溝式、打穴式和鴨嘴栽插式。開苗溝式和打穴式分別需要提前開溝和打穴,再進行栽植。開苗溝式一般利用鏟形開溝器提前開出一條溝壑,再將秧苗均勻地輸送至溝內,最后進行掩埋固定,垂直率難保證,且易掛苗。相比之下打穴式可提高移栽質量,但打穴和栽植兩個動作需精準并協同配合,對控制系統要求高,結構上較為復雜,目前鮮少應用。目前鴨嘴栽插式栽植器應用較多。
2019年許春林等[40]設計出Hermite插值非圓齒輪行星輪系草莓缽苗移栽機構,用一套回轉機構完成取苗、輸送、挖穴與栽植4個工序,取苗成功率92%,移栽成功率85%。萬霖等[41]對水稻插秧機改進了送秧機構、分插機構、植苗和定苗機構以及行走機構,研制出小型蔬菜移栽機。新疆農業大學研制的自動移栽機,取苗裝置通過氣動控制取苗作業,每個取苗單元由一排取苗指組成,取苗指與苗盤缽苗間隔對應,通過夾取缽苗莖稈方式取出缽苗。與該取苗方式相似的還有山東金利達公司的田耐爾牽引式自動穴盤移栽機,使用PLC電氣控制系統,可實現苗盤的自動連續輸送,采用的是吊杯式栽植器,自動化程度較高[41-42]。
歐美自動移栽技術較為成熟,機型偏大型化和智能化,其主要執行機構形式大部分為氣動,以及電液驅動。意大利Fabrizio等[43]基于DGNSS-RTK技術與液壓裝置結合研制出全自動葡萄移栽機,該機經半懸掛圓盤移栽機改造而成,特點是適用性強,可在丘陵和山區作業無需預先整地,效率較高。控制系統配備內置激光器(以保持行距相等)和連續線纜系統(作為同步集),通過DGNSS-RTK控制端計算葡萄樹的移栽位置,由電液元件執行實現全自動化。
綜上,自動補苗和路徑規劃是提升移栽機智能化水平的關鍵技術:(1)利用視覺檢測,替代智能化程度不高的光電傳感器檢測,采用圖像識別苗高、直立度判別秧苗的合格率以及計算漏栽率;(2)補苗取苗的路徑規劃,優化計算機算法。中國這方面的研究尚處于初級階段,與移栽機的配合程度及應用性有待提高,需進一步探索實用性。
可借助的現代手段和方法:在前期建模設計完成后,可以優先針對秧苗取出和栽植兩個關鍵過程,利用Matlab通過數學模型公式計算得到某點的理論軌跡曲線,結合ADAMS分析其機構原理,進行機構動力學分析,得到秧苗運動軌跡仿真工作軌跡,提取秧苗的運動姿態,進行物理樣機虛擬仿真,對部件機構及工作參數進行優化;后期研制出樣機后,借助高速攝影錄像采集,結合圖像分析軟件,得到實際的運動軌跡,與仿真模擬出的軌跡,以及理論軌跡曲線三者進行對比,驗證仿真理論及仿真試驗的真實度,并進一步利用虛擬實驗得到的最佳因素組合,進行樣機臺架試驗和田間試驗,得到樣機的試驗結論和移栽成功率、株距合格率、漏栽率、深度合格率、直立度合格率等移栽質量參數。
此外可利用有限元仿真軟件EDEM分析,機械化移栽中兩個關鍵過程:(1)取苗時,苗缽體與工作部件如夾苗爪相互作用關系下,缽體內基質顆粒的完整性或損失率;(2)落苗時,缽體落入穴孔土壤中,缽體基質顆粒于土壤顆粒之間的相互作用機理,及其對栽植質量的影響,例如栽植深度和垂直率。目前針對取苗過程的物料特性研究較多,但對缽體苗落入土中過程的物料特性對移植質量影響因素的研究較少。可利用EDEM軟件,仿真模擬缽體入穴的過程,探究秧苗或缽體內基質等對象與土壤間相互作用機理,分析苗缽與田地土壤相互作用,從而分析其特性因素對秧苗狀態的影響,如直立度及栽深,為裝置設計提供理論依據。
2 移栽機裝備現狀
移栽機按栽植器的結構形式不同可分為吊杯式、導苗管式、鏈夾式及撓性圓盤式,其適用性及特點對比見表1,部分代表機型的關鍵技術參數如表2所示。

表1 4種半自動移栽方式的特點Tab. 1 Characteristics of four transplanting methods

表2 部分代表機型技術參數Tab. 2 Parameters of partial representative equipments
2.1 吊杯式和鉗夾式移栽機
吊杯式移栽機在市場上應用最廣泛,根據栽植器結構不同可分為轉盤式、行星齒輪式和多連桿式[44]。鉗夾式有圓盤夾式和鏈條夾式移栽機[45]。兩者工作原理均是秧苗隨栽植器作回轉運動,高處人工喂苗,低處植入土壤,不同的是,吊杯式秧苗是靠自重落入苗穴[46-47]。鴨嘴式和吊杯式移栽機的栽植器較相似,鴨嘴式的驅動分擺臂式和行星輪式兩種。鴨嘴的張合可通過帶復位彈簧的彎頭和凸輪控制,凸輪的推程輪廓接觸彎頭壓縮彈簧,使鴨嘴張開,回程時彈簧復位鴨嘴閉合。
吊杯式和鉗夾式兩大類代表機型國內外最多,如圖2所示,日本PVHR2型[48]雙行膜上栽植機為擺臂鴨嘴式移栽,采用投苗杯下方的齒輪驅動8個苗杯圓周運動,并結合凸輪多桿件傳動使鴨嘴按“腰果形”的軌跡做往復運動,可延長接苗時間,實現零速投苗保證直立度,當苗杯轉動到鴨嘴栽植器上方時,苗杯的下端蓋打開,幼苗落入栽植器中,兩個栽植器上下交替接苗和植苗,移栽的直立度較好,栽植器形成的穴口小,可避免地膜被刮破。

圖2 PVHR2型蔬菜移栽機Fig. 2 PVHR2 vegetables transplanter
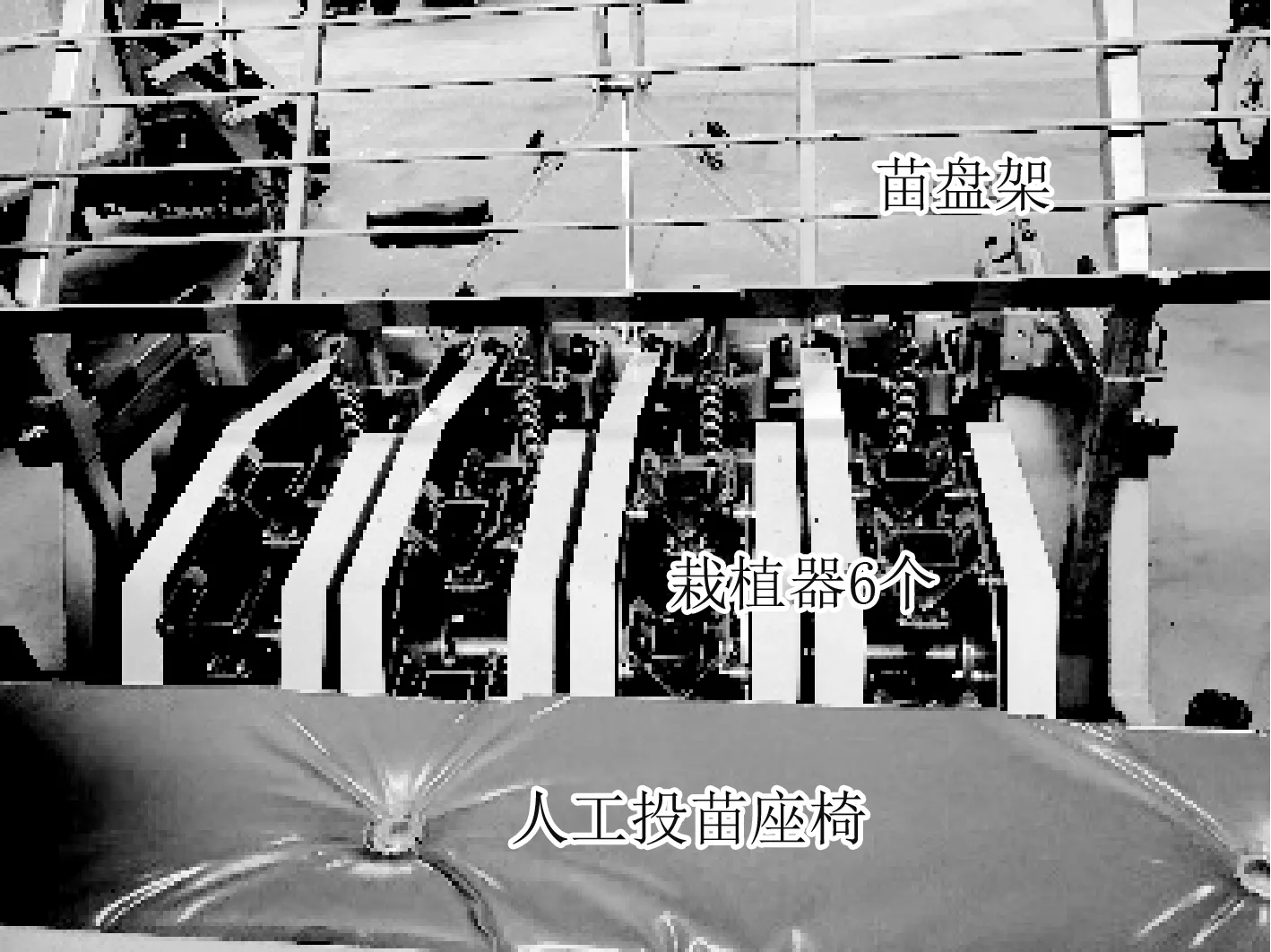
HOTECH的鴨嘴式四行移栽機如圖3所示,人工將幼苗投入栽植器中,每行6個栽植器圓周均布,由鏈條驅動旋轉,鴨嘴轉到最下方由撥桿打開,依次旋轉植苗。
吊杯式和鉗夾式移栽機的關鍵技術之一在于實現零速植苗,可借助ADAMS模型對栽植器的位移軌跡和速度進行分析,分析鴨嘴式栽植器的水平運動速度為0的時刻,此刻植苗,破土面積最小,直立率也最高[49-52]。
此外,入土之前缽苗在栽植器的運動過程是先與內壁面接觸碰撞下滑,期間還有平面運動,對栽植質量有較大影響,該過程的理論分析是栽植器的結構參數設計的重要依據。
(a) 四行人工乘坐投苗
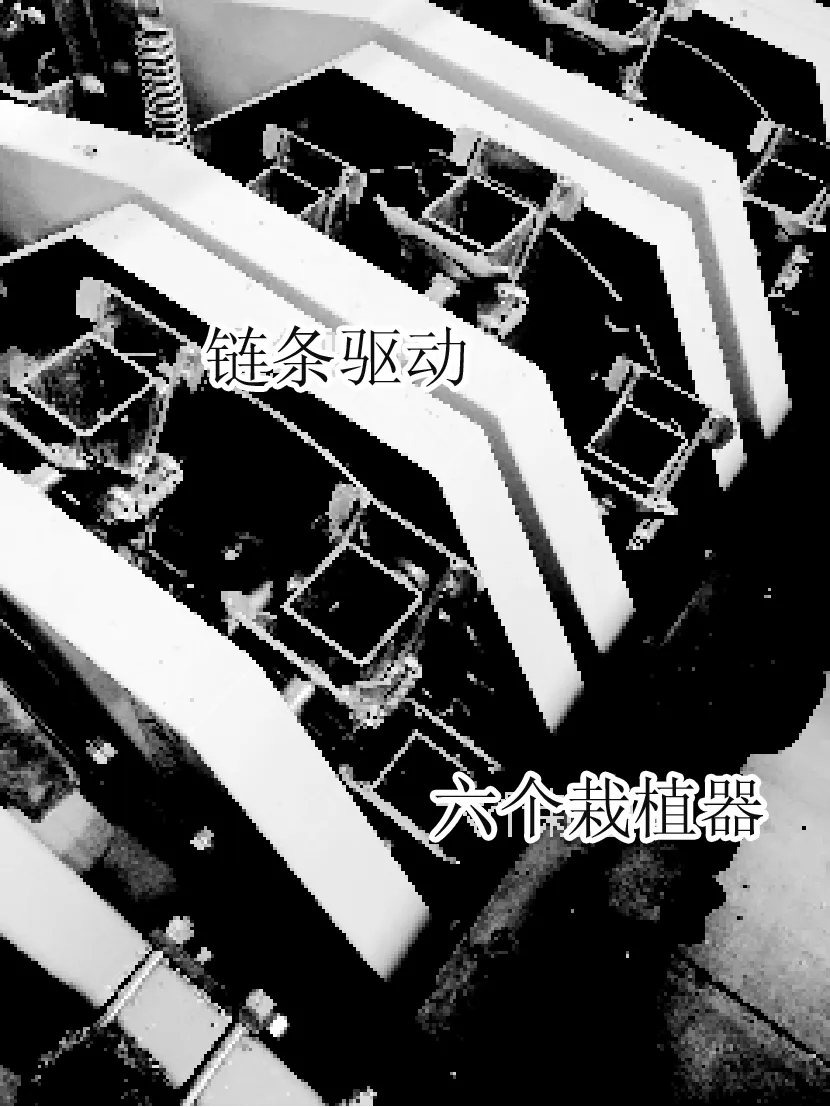
(b) 6個栽植器圓周運動圖3 HOTECH鴨嘴式四行移栽機Fig. 3 HOTECH four rows transplanter with duckbill
2.2 導苗管式移栽機
多功能導苗管式移栽機,由人工將苗盤架上的苗盤移放至輸送帶,工作時,由移栽機前方的推土鏟平地,開溝器開出苗溝,攪拌好的肥料由肥箱經下方管道排入苗溝。與此同時,上方輸送帶已將缽苗運送到導苗管管口,苗體在自重下沿管內壁滑落,由導苗機構直接栽植,或苗下落到導苗管最下端時,支架轉動使栽植器到達最高位置,接到苗體后往下轉動到最低位置時在彈簧裝置的作用下打開植苗。栽植器在上升過程中,彈簧收縮,將栽植器末端合攏,最后覆土,注水器灑水,完成移栽[53]。
國外對于導苗管式移栽機機型研制較為成功,代表機型多,均已推廣使用。例如英國Florida移栽機,美國Model 6000移栽機,意大利FAST系列移栽機等。國內導苗管式移栽機機型較少,且停留在試制階段,市場化應用較少。主要有黑龍江農墾科學院研制的2ZB型移栽機和中國農業大學開發研制的2DF導苗管式移栽機等。
2.3 撓性圓盤式移栽機
撓性圓盤式移栽機由人工將幼苗擺放至送苗裝置,在傳送帶作用下送苗裝置夾持幼苗垂直向下運動,兩片柔性圓盤在上端時張開夾持幼苗,至地面溝槽內時放苗移栽。該類移栽機的關鍵技術為宜栽區間的確定,可借助Adams軟件編寫撓性圓盤投苗過程的仿真腳本,驗證其仿真過程與實際過程是否吻合。同時對栽植過程中幼苗的運動軌跡方程及曲線,幼苗軌跡為余擺線,兩個零速栽苗點形成的區間為宜栽區間,田間試驗的檢驗評價指標為幼苗直立度、栽苗合格率、傷苗率[54-55]。
上述4種半自動移栽機部分代表機型如表2所示。歐美發達國家農業可連續耕作地塊面積大,其移栽機偏向大型智能化聯合作業,融合電控、液壓、氣壓等技術,機型適于在大塊田地多行作業,其制造成本較高,不符合中國國情,引進較少[56-58]。日本三大品牌小型移栽機在中國占據市場份額多,作業行數有1~6行不等,性能穩定,但價格較高。半自動移栽機械化技術在國內外研究較為成熟,機型多樣。國內仍以半自動移栽為主,工作效率較低,功耗相對較大,依賴人工手動喂苗,易造成漏栽,且效率較低,不足國外的一半。國內市場需求大,但移栽機研制成本高,且多以機械結構為主,性能不夠穩定。
3 存在問題及發展趨勢
3.1 存在問題
由于中國種植模式多樣,標準化低,農機與農藝融合度有待提高,研制出的自動移栽機較少,實際應用較少,且移栽機械化技術缺乏一定創新性,關鍵機構設計需要突破,自動化移栽技術的研究急需推進。
1) 農藝沒有考慮宜機化,重視程度低。機械化移栽本身對農藝的要求較高,我國旱地作物的播種、育苗等機械化程度不高,農藝不規范,例如溝寬、壟矩、起壟方式以及溫室大棚的結構設計等沒有考慮宜機化,這對移栽機的適應能力提出較高的要求。
2) 中大型移栽機推廣較慢,研發制造成本高。由于國外農業多為大農場模式,尤其是歐美國家,設計的移栽機體型龐大,制造成本高,價格昂貴。從研發制造情況看,移栽機研發周期長且人力和資金投入高,影響農機企業研發投入的積極性,而科研院所的研發與市場并沒有很好地結合起來。從市場推廣情況來看,我國多為小農戶種植,分布廣而散,一般農民負擔不起,小型號的機型更適宜于我國作物的種植模式。
3) 易破損,幼苗損傷大。損傷主要集中在取苗和栽植兩個關鍵環節,尤其是取苗機構作為移栽機最核心的部件之一,其主要問題為取苗成功率低、漏取、幼苗受傷、缽體易破損等,直接影響了整機移栽質量。幼苗的損傷率以及栽后長勢一直是評價種植機械性能的重要指標,移栽傷苗、漏栽不可避免,可以采取補苗措施,將損失降低至可接受范圍之內。
4) 結構復雜,智能化程度低。傳統的移栽機結構復雜,較多地采用復雜的機械傳動方式,易造成幼苗損傷問題。農田環境復雜多變、作業對象差異性較大使得其移栽質量下降。隨著電子電氣技術的發展,電氣傳動、液壓傳動等將使移栽機械向著智能化的方向發展。
3.2 發展趨勢
1) 農藝、農機與農信融合發展。隨著農業信息化、智慧農場和“互聯網+”等技術的快速發展,農業傳感器技術、精細農業技術和物聯網技術等綜合應用于作物長勢監測、種植檢測、系統決策等環節,提高了資源利用率和工作效率。實現農機、農藝和農業信息技術的深度融合,能有效提高種植機械的智能化水平。
2) 現代技術的運用。離散單元法、虛擬樣機技術、高速攝像技術等現代技術的運用為自動化移栽機的取苗、送苗、栽植等過程研究及其機理闡釋提供了很好的手段。研究人員除開展機構動力學理論分析外,還可利用上述仿真軟件開展虛擬試驗研究,同時配合高速攝影技術對虛擬試驗結果進行驗證,從而優化機構設計參數,提高裝備的可靠性和移栽作業質量。
3) 移栽關鍵技術。對缽苗的生物學特性和力學特性的深入研究可為移栽的夾取苗機構設計提供理論基礎,此外可開展幼苗植入土壤過程的試驗研究,從而對栽植器參數進行優化設計。目前取苗機構研究較多,但對送苗環節研究不足,整排式取苗及移栽可以大幅提高移栽效率,配合整排是多株缽苗同時栽植的送苗機構急需推進,是將來的研究趨勢。
4) 機型創新性、通用性待突破。移栽關鍵技術過于依賴國外現有的結構,缺乏創新性。目前典型的吊杯式、導苗管式、鏈夾式及撓性圓盤式成熟的移栽機型,各有利弊,適用性差別較大,可考慮融合這些機型已有機構,或結合某些環節的創新性設計,從而研制出通用性更高的機型。
5) 移栽的高效化。為加速移栽機高效化、自動化進程,中國開始探索式地進行整排式穴盤苗移栽機的研究,但多集中于整排式多株缽苗的取送苗研究,對于與栽植器的配合工作欠考慮,且鮮少考慮苗盤更換機構,相關的控制系統往往在室內試驗效果好,大田復雜環境下缺乏可靠性。提高移栽高效化且穩定性是移栽機將來發展趨勢。
6) 移栽機的智能化。視覺檢測和圖像處理等先進計算機技術的發展較快,將其運用于移栽前缽苗的質量判別、移栽的路徑規劃,以及移栽后作業的質量檢測,檢測方面如果可以實現閉環性質的實時動態檢測調整,提高機型智能化也是一大趨勢。
7) 移栽機器人技術。移栽機器人技術成為當前的研究熱點和趨勢,但是相比嫁接、采摘除草機器人的發展仍滯后。目前難點在于自動取苗、送苗、投苗等關鍵環節的集成設計。控制系統可采用單片機程序、PLC程序及Fuzzy-PID控制等,配合氣動系統、行程開關、輸送裝置的協同,利用傳送帶、圖像采集相機和機械手夾持機構,這些部分的集成和技術的深入研究,都將推動移栽機器人技術進一步發展。
8) 移栽作業無人化。自動導航技術與移栽機結合,該技術在大面積作業的水田已經得到應用,水稻插秧機無人駕駛技術相對已經成熟,但旱地移栽對象一般為非經濟型作物,應用少,相關的研究也鮮少有人開展,隨著自動導航以及無人駕駛技術的進步,實現移栽無人化作業是未來發展趨勢。