預測控制系統直接操縱流量調節閥閥位的控制性能評價
2022-08-16 02:51:54羅雄麟
化工自動化及儀表 2022年4期
汪 磊 許 鋒 羅雄麟
(中國石油大學(北京)信息科學與工程學院)
符 號 說 明

模型預測控 制 (Model Predictive Control,MPC)是化工過程控制領域常用的一種先進控制方法,可實現有約束多變量被控系統的有效控制[1~4]。 但是當被控對象為串級多回路控制系統時,預測控制的引入相對地增加了控制系統的反饋回路,從而導致系統響應時間延長。 為了解決此類問題,可以在傳統預測控制系統的基礎上利用模型預測控制處理多變量系統的能力,達到減少串級回路的目的。 因此,筆者進一步提出利用預測控制的先進控制性能,最大程度地簡化預測控制系統結構,以提升預測控制系統的控制性能[5,6]。
由于早期設計MPC控制器時計算機的計算性能有限,并且化工領域被控對象動態響應時間的值往往為小時級[7~9],因此MPC控制器的控制周期為分鐘級,通過將被控對象的動態響應時間除以60作為預測控制器的控制周期,以被控對象動態響應時間的25%作為標準設置預測時域[10]。 除此之外,串級回路中包含的PID控制器計算量小,控制周期為秒級,可以實現對底層實際裝置的實時控制,因此在預測控制系統中減少串級回路時往往保留串級主回路或副回路,同時實現預測控制器的分鐘級控制周期以及PID控制器對流量調節閥的秒級實時控制[11]。 筆者在這一研究的基礎上,提出在預測控制系統中由預測控制器直接操縱流量調節閥閥位,以實現減少串級回路數量并以系統階躍響應的動態跟蹤性能與抗干擾能力作為評價指標,分析不同預測控制系統的控制性能。
1 預測控制直接控制流量調節閥閥位的問題分析
由預測控制器直接控制流量調節閥時,可以使圖1所示的多回路預測控制系統轉變為圖2所示的單回路預測控制系統,在最大程度上降低控制系統的復雜度。 其中Gc1(s)、Gc2(s)分別表示串級回路主、副控制器傳遞函數;Gv(s)為控制閥的傳遞函數;Gp1(s)、Gp2(s)為主、副被控對象的傳遞函數;s表示復數變量;θsp表示預測控制器輸出操縱變量作為串級主回路的設定值;qsp、uop分別表示串級主、副控制器輸出控制變量作為串級副回路與流量閥的設定值, 因此qsp通常表示流量、uop表示閥門開度百分比;q、θ、C分別代表串級副回路、主回路與預測控制回路的被控變量;上標L、H分別表示在預測控制器中設置被控變量的約束下限與上限;F1、F2分別代表進入控制系統回路的擾動變量;Gf1(s)、Gf2(s)為擾動通道的傳遞函數。

圖1 傳統多回路預測控制系統結構

圖2 預測控制器直接操縱流量調節閥閥位的單回路預測控制系統結構
為實現上述控制系統的轉變,達到由MPC控制器直接操縱流量閥位的目的,需要解決兩方面的問題。
一方面, 需要改變預測控制的參考模型[12],即將圖1中輸入量θsp與輸出量C的傳遞函數G(s)轉變為輸入量uop與輸出量{q,θ,C}輸出的傳遞函數矩陣G1(s),以實現MPC控制器輸出操縱變量轉變為閥門開度百分比的目的[13]。 但是在實際情況中,無法直接改變工業現場的工藝裝置來獲得流量閥位uop與Ω={q,θ,C}的傳遞函數矩陣。 因此,可以通過階躍響應測試法, 在圖1的傳統預測控制系統上由階躍響應獲得溫度設定值輸入量θsp與輸出量{q,θ,C}的傳遞函數H1(s)、H2(s)、H3(s),構成傳遞函數分塊矩陣M(s),以及θsp輸入與流量閥位uop輸出量的傳遞函數N(s):

再利用傳遞函數矩陣M(s)、N(s)即可獲得被控系統中uop至Ω={q,θ,C}的傳遞函數矩陣G1(s):

另一方面,由圖2可知取消全部串級回路后,如果不改變預測控制分鐘級的控制周期,將無法實現對流量閥門秒級的實時控制[14]。 因此,還需改變MPC控制器的控制周期, 即將其縮短為秒級, 在計算機計算性能大幅度提高的情況下,該問題可以在普通計算機上得以解決。
因此,按照筆者提供的設計方法解決上述兩方面的問題后, 即可在實物模型上進行驗證,探究由預測控制直接操縱流量調節閥閥位的控制系統性能。
2 預測控制跟蹤性能評價
為了在理論基礎上設計并評價實際控制系統的性能[15],以Matlab/Simulink平臺搭建的非線性串聯連續攪拌反應釜 (Continuous Stirred Tank Reactor,CSTR)[16]為預測控制被控對象,控制結構如圖3所示。 輸入為冷卻水流量qc與恒定流速為100 L/min的反應物進料流量q, 輸出物料通過與進料流量相同的恒定流速輸出,因此釜內液位處于理想控制中。 反應釜的主要目的是通過釜內進行強烈攪拌作用使得進料反應物發生放熱反應,將反應物濃度被控變量C1、C2分別維持在設定的目標區間內, 并且通過調節冷卻水流量qc1、qc2進行熱量交換, 達到調節釜內溫度被控變量θ1和θ2的目的,主要擾動為反應物進料流量q。

圖3 串聯CSTR控制結構
在觀察預測控制的動態跟蹤性能時, 在MPC控制器中設置了濃度被控變量的約束范圍[CL,CH],其中CL、CH分別表示濃度C輸出的約束下限和約束上限。
串聯CSTR通過線性化工具箱獲得的兩個典型穩態點見表1。

表1 串聯CSTR穩態工作點及被控變量
實驗中,當系統處于穩態工作點Ⅰ時,在約束范圍內改變MPC控制器的濃度設定值C2sp,觀察不同預測控制方案下對濃度設定值的動態跟蹤性能。
首先建立傳統情況下的預測控制系統作為方案一,系統框圖如圖4所示。 3種方案中MPC控制器及CSTR變量設置見表2。

表2 不同控制方案的MPC控制器與CSTR變量設置

圖4 傳統預測控制系統架構下的多入多出串聯CSTR結構框圖
其中,Gqθ(s)、GθC(s)分別為反應釜裝置在穩態工作點附近冷卻水流量與溫度、溫度與濃度之間的控制通道傳遞函數;H1(s)、H2(s)為主、副測量反饋通道傳遞函數;在第2條串級控制回路中,G′c1(s)、G′c2(s)、G′v(s)、H′1(s)、H′2(s)、G′qθ(s),G′θC(s)分別表示與第1條串級回路中各模塊相對應的傳遞函數。
此時MPC控制器輸出操縱變量θsp作為串聯CSTR中溫度串級主回路給定值,反應釜輸出濃度被控變量C反饋回MPC控制器, 達到反饋校正的目的。 并且在濃度C輸出達到穩態點Ⅰ時改變MPC控制器的濃度設定值C2sp, 使反應釜2從穩態點Ⅰ重新達到穩態點Ⅱ,此時系統動態跟蹤響應效果如圖6所示,并且由圖6可知,方案一添加預測控制回路時,穩態響應時間由7 min 延長至8 min,即系統串級回路數量的增加將導致系統的響應時間延長。
其次,根據系統結構框圖5建立單回路預測控制系統作為方案二,通過式(3)、(4)建立參考模型并植入MPC控制器,使得此時MPC控制器輸出操縱變量轉變為閥門開度百分比設定值uop(0%~100%), 達到直接操縱流量調節閥閥位的目的。
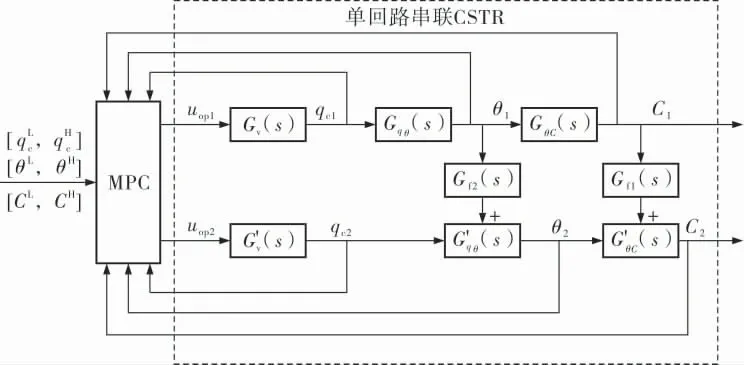
圖5 預測控制系統直接操縱串聯CSTR流量閥位的結構框圖
參考模型具體如下:

在方案二中根據表2設置反應物濃度C與冷卻水流量qc的約束區間,并且將二者同時作為預測控制被控變量反饋回MPC控制器。 同樣在穩態工作點Ⅰ時改變濃度設定值C2sp使被控變量重新達到穩態點Ⅱ,觀察濃度被控變量C2的動態跟蹤性能,此時MPC控制器的控制周期為秒級,達到與PID控制器相同的實時控制,跟蹤效果如圖6所示。

圖6 3種控制方案下反應物溫度和濃度跟蹤性能
由圖6可知, 雖然在方案二中可以實現預測控制直接操縱流量閥節閥的閥位,但是取消全部串級回路時未將溫度被控變量也納入預測控制約束區間,將導致溫度與濃度的動態響應過程變化較為劇烈, 容易引起穩態點遷移及模型失配,在實際工業現場也不能保證最終產物的純度。 因此,進一步提出方案三,以解決此類問題。
方案三在方案二的基礎上將溫度被控變量也納入預測控制被控變量中, 并且添加溫度θ2輸出約束。 觀察此時預測控制系統的最終輸出物料中溫度θ2與濃度C2的動態跟蹤響應,MPC控制器及CSTR變量設置見表2。
最終3種控制方案的動態跟蹤效果如圖6所示,可以得出相對于方案一、二,方案三最大程度地利用了預測控制處理多變量、有約束控制系統的先進控制性能,并且在取消全部串級回路的情況下,將所有輸出被控變量全部納入預測控制的約束范圍內時,預測控制系統可以取得更好的控制效果。
3 預測控制系統抗干擾性能評價
在以上3種控制方案的基礎上可以進一步探究系統的抗干擾性能,通過在系統輸出處于穩態點Ⅰ時, 將反應物進料流量q由常量100 L/min轉變為在100 L/min附近變化的正弦隨機擾動變量,正弦隨機變化公式具體如下:

其中,rand(t)表示幅值在0~1的隨機數,設置正弦波幅值最大變化增量為±1.5 L/min, 以保證輸出濃度在約束范圍內變化不過于劇烈,最小正周期設置為17 min, 介于方案一預測控制回路開環動態響應時間的2~3倍, 保證正弦波擾動變化幅度不過于劇烈的同時變化速率也在合理范圍內。 最終的正弦隨機波形如圖7所示。

圖7 反應釜進出料流量q的正弦隨機變化
當以上3種預測控制系統都處于穩態工作點Ⅰ時,在Simulink平臺中同時將3種控制方案中反應釜1的進料q設置為圖7中的正弦隨機擾動,同時設置反應釜1的反應物出料速率與反應釜2的進料與出料速率與q相同, 保證兩個反應釜內液位平穩不變,依舊處于理想控制中。 觀察此時3種控制方案中系統的抗干擾性能,最終MPC控制器輸出的操縱變量及各類被控變量如圖8所示。
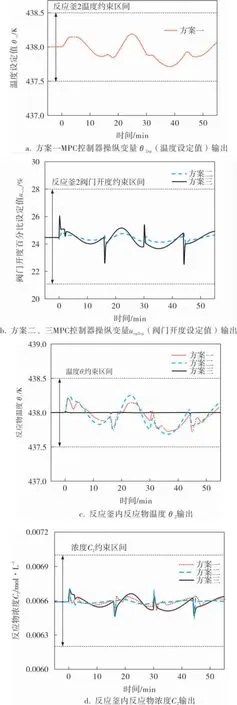
圖8 3種控制方案下CSTR內溫度、濃度輸出情況
通過綜合分析圖8中的3種不同預測控制方案下的串聯CSTR溫度和濃度輸出曲線可知,為了降低控制系統的復雜度,可以按照方案二由預測控制直接操縱流量調節閥的閥位,但是由于未將溫度納入預測控制被控變量,導致方案二溫度輸出在減少串級回路時抗干擾效果明顯低于方案一。 在方案三中,通過將溫度納入預測控制被控變量,最終輸出產品溫度的抗干擾效果明顯優于方案一和方案二, 并且3種方案的濃度輸出皆處于約束區間內,變化幅度較小,驗證了方案三具有更佳的抗干擾性能。
綜合上述分析可知,方案三在降低控制系統復雜度的同時,也抵消減少了串級回路導致的溫度抗干擾效果變差的問題。
4 結束語
針對預測控制系統在引入MPC控制器時控制系統復雜度增加的問題,筆者以串聯CSTR為研究對象,給出了由預測控制直接操縱流量調節閥閥位的設計方案,通過動態跟蹤性能與抗干擾性能的比較分析,說明該方案相對于傳統預測控制系統不僅可以有效降低控制系統復雜度,還可以提高系統的動態跟蹤性能與抗干擾性能。
