基于數字孿生的智能網聯汽車創新實驗平臺探索與研究
2022-08-19 11:55:00李永福周發濤王錦江樊俊宏朱浩
創新創業理論研究與實踐 2022年14期
李永福,周發濤,王錦江,樊俊宏,朱浩
(重慶郵電大學 自動化學院 智能空地協同控制重慶市高校重點實驗室,重慶 400065)
智能網聯車輛作為智能交通系統的一個重要研究方向,現階段正處于快速發展中,其相關學科如機器人工程、自動化等具有專業性強、覆蓋知識面廣、對實踐能力要求高等特點[1]。同時其含有的技術價值,在節能減排、駕駛安全以及交通效率等方面蘊含巨大的潛力,對我國汽車產業技術升級與轉型、發展技術優勢意義深遠。隨著高等院校在該領域研究的逐步深入,對實踐實驗數據的要求也在逐步提高。目前受各種條件的限制,部分高校教師和學生在實踐應用上存在資源不足和教學平臺缺乏等問題[2]。
基于上述情況,本文應用數字孿生技術[3]作為虛擬世界和現實世界之間的橋梁,結合傳感器收集到的車輛實時狀態數據,將兩個世界聯系在一起設計創新實驗平臺。該平臺不僅解決了現階段高等院校在智能網聯汽車相關教學活動中缺乏實驗教學平臺的問題,同時能夠滿足學生在實踐過程中的多樣性需求,開發學生的創新能力以及提高學生解決實際工程問題的能力。同時也符合現階段教育、社會的發展需求,有助于提高學生的綜合素質能力,培養學生后續進入崗位工作的一些必備技能。
1 創新實驗平臺內容構建
1.1 實驗平臺總體結構
考慮實驗平臺常用的教學環境以及實際的智能網聯汽車測試環境,將多方面的元素綜合納入平臺結構設計,充分保證學生在使用過程中的多樣性。如圖1所示,以虛擬世界PreScan 和Matlab 仿真軟件為基礎,結合現實世界車輛系統以及外部傳感器、數據通信以及數據處理完成該實驗平臺的設計。
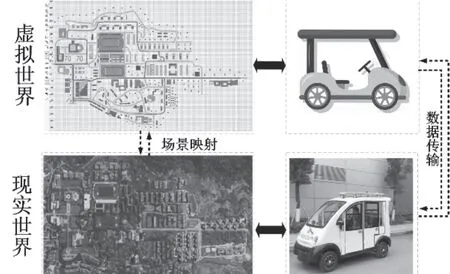
圖1 創新實驗平臺架構
1.2 虛擬世界框架描述
(1)場景搭建。
在智能網聯汽車仿真軟件PreScan 中,基于基礎設施、環境元素和交通參與者等預定義模型或通過Model preparation tool 接口導入自主設計的模型,進行虛擬仿真場景的搭建,能夠充分滿足學生的可變設計要求。對于學生開展智能網聯汽車的虛擬測試實驗,本平臺提供了快速的場景搭建能力。
(2)環境感知。
環境感知模塊的任務是感知車身周圍的道路信息以及交通環境,從而為智能網聯汽車的決策控制提供可靠的信息來源。為研究網聯環境下的智能車輛控制,本平臺主要采用了V2X 傳感器和GPS 傳感器,分別用于獲取車輛周邊信息和車輛自身信息[4,5]。
(3)算法加載。
算法加載模塊在整個仿真平臺的運行中承擔著核心作用。PreScan 采用了標準的Matlab/Simulink 接口作為控制系統的設計基礎,因此算法加載將在Matlab/Simulink 中完成,學生在實際運用過程中,可通過Simulink 模塊、m 文件或Stateflow 編程等方式完成算法的加載,其標準化和多樣化的編程方式,一方面降低了學生的上手難度,另一方面為學生提供了更多選擇,有利于激發學生的學習積極性。
(4)交互界面。
交互界面作為虛擬平臺與使用者進行信息交互的介質,主要是在Matlab/Guide 工具箱中完成。基于Matlab/Guide 工具箱開發仿真平臺的交互界面具備開發周期短、功能性強、實踐效果顯著等特點[6],對學生運用Matlab 進行編程的能力提出了要求,有利于提高學生的實踐編程能力,激發學生的界面開發興趣。
1.3 現實世界框架描述
現實世界中以真實車輛為基礎,搭載主控單元、交互設備、通信模塊和無線路由以及GPS 傳感設備等。
(1)主控單元。
主控單元,本平臺采用的是基于ARM 架構的嵌入式E9 板,基于Linux 的操作系統,利用多線程、多進程技術實現GPS 信息采集、與通信模塊之間的車輛狀態信息收發以及與人機交互平板之間的信息交互。
(2)交互設備。
本平臺采用搭載基于安卓應用軟件的平板,實現車輛與駕駛人員之間的交互,通過人機交互APP 顯示車輛的實時狀態信息和實時建議行駛速度,采用數字和曲線兩種呈現方式,給駕駛員提供合理的行駛信息。
(3)通信模塊。
通信模塊作為整個外部設備中信息交互的核心載體,在保證通信速度快、與其他設備交互靈活、信號收發穩定的前提下,本平臺采用漢楓HF8104 通信模塊用于實現4G 通信接口的提供,該模塊支持多種協議,接入其他端口便捷;同時,配合高性能路由器,能夠保證整個車內局域網中所有設備的相互訪問和通信。
(4)GPS 傳感設備。
車輛上的GPS 傳感設備主要是利用差分GPS 實現精確的信息獲取。通過搭載的移動GPS 接收機,該設備一方面獲取基準站傳回的GPS 信息,一方面實時接收GPS 衛星信號的定位信息。通過基準站已知的精確坐標,計算基準站到衛星的距離改正數,最終得到較為準確的定位信息。
2 創新實驗平臺實驗過程設計
在已構建的虛擬世界平臺和現實世界平臺的基礎上,本文提供典型隊列控制算法設計和基于數字孿生的隊列控制實驗。
2.1 車輛隊列算法設計
2.1.1 間距策略
間距策略主要可以分為恒定間距、恒定時距和非線性間距策略。為了提高車輛隊列的串穩定性和安全性,本案例采用恒定時距策略,其數學表達式如下:

其中r是各相鄰車輛之間靜止時的間距,hd是車頭時距,vi(t)是t時刻第i車的速度。
2.1.2 車輛模型
車輛模型描述如下:

其中xi(t)是第i輛車的重心位置,ui(t)是控制器輸出的期望加速度。
2.1.3 車輛隊列控制器設計
本案例結合車輛間耦合作用、反饋控制和前饋控制[7],設計車輛縱向控制器如下:
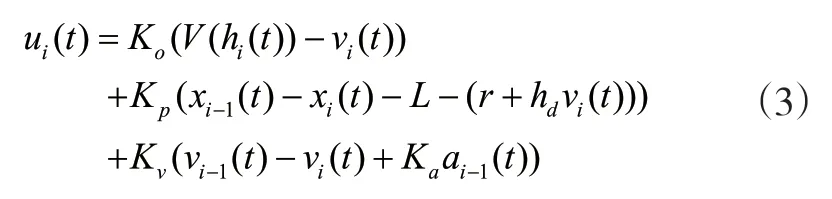
其中ai-1(t)是第i-1 輛車的實際加速度。hi(t)=xi-1(t)-xi(t)-L是i車與i-1 車之間的車輛間距。Ko,Kp,Kv,Ka是敏感系數。L是車輛車身長度。V(hi(t))是代表車輛間耦合作用的非線性函數,它可以有效避免負速度和負間距的產生[7]。
2.1.4 控制目標
本案例的控制目標是使所有車輛的速度與車輛間距保持一致,形成車輛隊列行駛,其數學表達式如下:

2.2 實驗設置
2.2.1 場景設置
虛擬場景為PreScan 中構建的3D 場景,如圖2所示,呈現了在PreScan 中重構的重慶郵電大學南部校區的3D場景。

圖2 虛擬世界場景
現實場景由測試環境以及網聯車輛測試系統組成,圖3展現了在重慶郵電大學南部校區由三輛車組成的網聯車輛測試系統,每輛車上搭載了通信設備、GPS 設備、人機交互設備等模塊。
2.2.2 實驗參數設置
在本案例中,虛擬世界的采樣時間間隔設置為0.05s。領航車輛的初始位置設定為x0(0)=14.8m,跟隨車輛的初始位置設定為x(0)=[7.4,0]Tm,領航車輛的期望速度如公式(5)所示:

車輛的初始速度設定為v(0)=[0,0,0]Tm/s。
2.3 創新實驗平臺結果分析
2.3.1 數據交互
虛擬-現實世界之間的數據交互主要是通過車載4G 通信模塊完成。通過建立虛擬世界與實現世界之間的UDP 通信協議,實現虛擬世界和現實世界之間的信息交互。數據交互具體流程如下:(1)實際車輛狀態信息數據采集,(2)車輛數據打包,(3)車輛數據發送,(4)仿真平臺接收數據與反饋。
2.3.2 隊列控制
通過在虛擬世界和現實世界之間建立數據交互,現實世界采集到車輛實時狀態信息后發送到虛擬世界中,虛擬世界解析接收到的數據,并在車輛隊列控制器的作用下,計算出跟隨車輛1 和2 的期望加速度,并將該期望加速度指令轉換為驅動仿真世界中車輛行駛的指令,同時將控制信息反饋到現實世界的人機交互平板APP 中,人機交互平板APP 經數據解析后呈現出建議的行駛信息,駕駛員由此完成對真實車輛的操控,最終實現虛擬世界和現實世界中車輛的平行行駛。
2.3.3 實驗結果分析
圖4呈現了所有車輛的速度曲線,在t∈[0,10]s區間內,車輛從靜止狀態逐漸加速到4.17m/s 的期望速度,當領航車輛達到期望速度后,跟隨車輛1 和2 也能在稍滯后的時間內跟隨行駛。圖5車輛間距誤差曲線圖中,可以看出車輛在現實世界的相對位置變化情況,驗證了所設計的平臺的有效性。
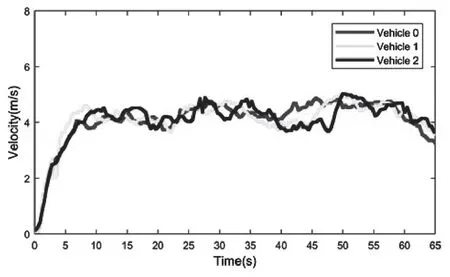
圖4 車輛速度曲線
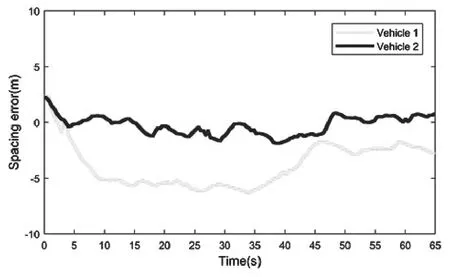
圖5 車輛間距誤差曲線
3 結語
本創新實驗平臺具備測試環境可控性、開放性、操作簡易、可重復仿真、實驗成本低等優點。并且通過此創新實驗平臺,可以在教學過程中實現從虛擬到現實、從理論到實踐的完整課程體系。由理論知識到仿真實現,再從仿真實現到實車驗證,逐漸延伸,提高了學生的自主創新能力和學習積極性。同時,本平臺有效地將理論與實踐相融合,促進了實踐教學的發展,有助于完善課程體系,培養既具有交叉學科背景又具有前沿科學知識的人才,為智能網聯汽車學科群建設提供支撐。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
文苑(2020年11期)2021-01-04 01:53:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中華手工(2017年2期)2017-06-06 23:00:31
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
現代計算機(2016年12期)2016-02-28 18:35:29
中外會展(2014年4期)2014-11-27 07:46:46
中國衛生(2014年12期)2014-11-12 13:12:38
杭州科技(2014年4期)2014-02-27 15:26:58