圓錐外形高速飛行試驗轉捩測量技術研究及工程實現
2022-08-25 10:47:06劉宇飛
導彈與航天運載技術 2022年4期
李 宇,聶 亮,劉宇飛,袁 野,王 迅
(空間物理重點實驗室,北京,100076)
0 引 言
邊界層轉捩是流態由層流向湍流轉變,由于層流邊界層和湍流邊界層在壁面摩阻和換熱系數等方面有明顯的區別,因此轉捩對飛行器的氣動力/熱分布特性都會產生顯著的影響。在氣動力方面,轉捩可能對飛行器施加明顯的擾動力矩,飛行阻力勢必大幅增加,對飛行器的飛行穩定性和射程指標實現帶來巨大風險。在氣動熱方面,轉捩的影響更加顯著,通常導致飛行器表面熱流成倍增加(典型狀態下湍流熱流通常是層流熱流的3~5 倍),嚴重時會導致飛行器熱防護系統因氣動加熱明顯超出預期而破壞。因此,能否準確預測高速邊界層的轉捩成為決定高速飛行器設計成敗的關鍵問題之一。
理論計算、風洞試驗和飛行試驗是空氣動力學問題研究的3 個重要手段。對于高速邊界層轉捩問題,目前理論計算方法尚不能完整、可靠地揭示邊界層轉捩機理以及對轉捩進行合理的預示,地面風洞的試驗能力尚不足以完全復現飛行狀態,而飛行試驗則可直接、真實地獲取飛行器邊界層轉捩信息,為轉捩理論方法的完善甚至是地面風洞試驗的標定或校驗提供數據。國內外開展了相關飛行試驗研究,如歐空局先后開展了IXV、SHEFEX、EXPERT 等以科學目標為主的飛行試驗研究,其中就包括邊界層轉捩測量。美國AFRL 和澳大利亞DSTO 聯合實施的HIFiRE 計劃,目前為止共有3 發飛行試驗專門研究邊界層轉捩問題(HIFiRE-1,HIFiRE-5,HIFiRE-9)。中國空氣動力研究與發展中心進行了MF-1 航天模型飛行試驗,主要針對邊界層轉捩和激波/邊界層干擾兩類空氣動力學現象開展測量和研究,試驗獲得圓滿成功,獲取了可供分析的遙外測數據。中國航天空氣動力技術研究院開展了“星空-1”號和“星空-2”號飛行試驗,在高速條件下對邊界層轉捩開展了測量和研究。
以高速(>6)邊界層轉捩為主要研究目的,開展了系列飛行試驗,包括軸對稱和面對稱兩類外形,首次試驗為圓錐外形。轉捩測量是轉捩飛行試驗實現科學研究目標的關鍵,本文對圓錐外形飛行試驗的轉捩測量技術開展了研究,并進行了工程實現,成功通過飛行試驗的驗證,獲取了豐富的轉捩測量數據,并對轉捩測量數據進行了初步分析。
1 驗證器外形及飛行方案
驗證器由頭艙、設備艙和控制艙組成,其中頭艙為圓錐外形(如圖1 所示),球頭半徑=5 mm,半錐角為7°,測量傳感器主要布置在頭艙,設備艙用于安裝相關設備,控制艙安裝4 個空氣舵,用于對驗證器姿態的控制。
圖1 驗證器頭艙外形Fig.1 Shape of the Head Cabin of Test Vehicle
驗證器采用兩級火箭發動機為助推,一、二級發動機將驗證器推送至所需的高度和速度。驗證器與助推器頭體分離后獨立飛行,利用空氣舵對驗證器姿態進行控制,使驗證器保持10°攻角穿越轉捩測量窗口(高度40~20 km),測量窗口內>6,出測量窗口后進行減速回收。
2 轉捩測量方案研究
2.1 高速飛行環境力/熱參數測量技術研究
表面熱流、溫度和脈動壓力是反映邊界層轉捩最直接的信息,飛行試驗通過穿壁傳感器直接測量這3 個物理量。本文對如何在高速飛行環境中準確可靠地獲取能夠合理反映轉捩信息的力/熱參數開展了研究。
2.1.1 小型化高精度傳感器研究
傳感器一方面要適應高速飛行條件下嚴酷的氣動加熱環境,另一方面要能夠實現測點的高密度布置和降低傳感器安裝對表面狀態的影響,因此牽引設計和研制了耐高溫的小型化高精度的溫度和熱流傳感器,并選用了小尺寸的脈動壓力傳感器。傳感器相關參數如下:表面溫度測量采用表面溫度傳感器,敏感面直徑為3 mm,耐溫1000 ℃,熱電偶裸絲響應時間小于0.1 s;表面熱流測量采用薄膜熱電堆式熱流傳感器,敏感面直徑為6.5 mm,耐溫700 ℃,響應時間小于1 ms;脈動壓力測量采用高頻壓力傳感器,前端面直徑為2.54 mm,耐溫不超過300 ℃,響應頻率50 kHz。
2.1.2 傳感器尺寸對表面狀態影響分析

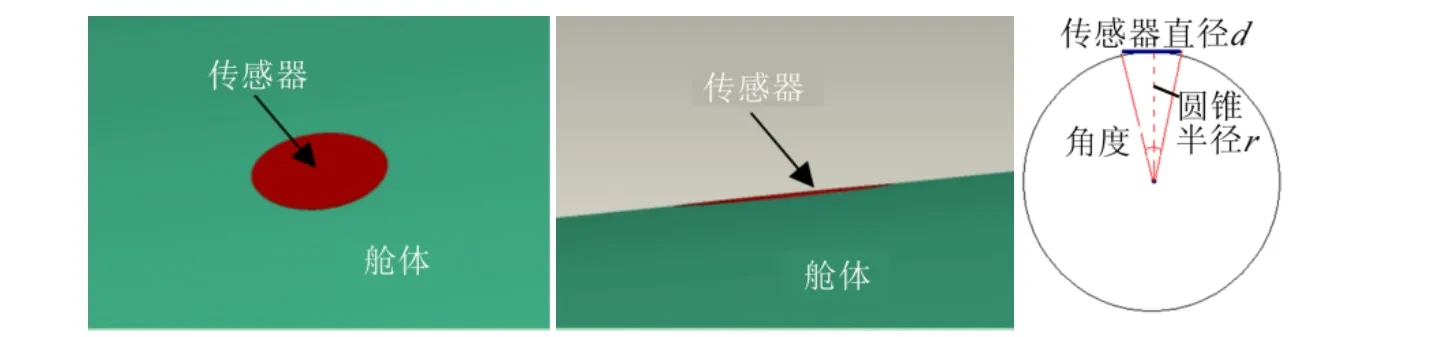
圖2 傳感器與艙體不共型示意Fig.2 Schematic Diagram of The Differences in Surface Profile between Sensor And Cabin
2.1.3 傳感器與艙體傳熱特性匹配設計
傳感器穿壁安裝會導致艙體局部傳熱特性改變,影響表面溫度分布進而可能影響邊界層轉捩,同時也會影響傳感器測量準確性。式(1)給出了一維半無限體熱傳導方程,在表面熱流為˙的情況下,表面溫度的解析公式為式(2),可以看出,熱乘積是影響傳熱的主要因素,因此在傳感器設計時需要盡量保證傳感器材料與艙體材料的熱乘積接近。

以溫度傳感器為例,溫度傳感器外殼體采用了與艙體材料相同的不銹鋼材料,且選擇了與艙體材料熱乘積相近的內部填充材料。為了驗證傳感器的測量準確性,開展了石英燈輻射加熱試驗,溫度傳感器安裝在不銹鋼平板試驗件上,同時在傳感器附近平板表面貼熱電偶進行溫度測量,測量結果如圖3 所示。
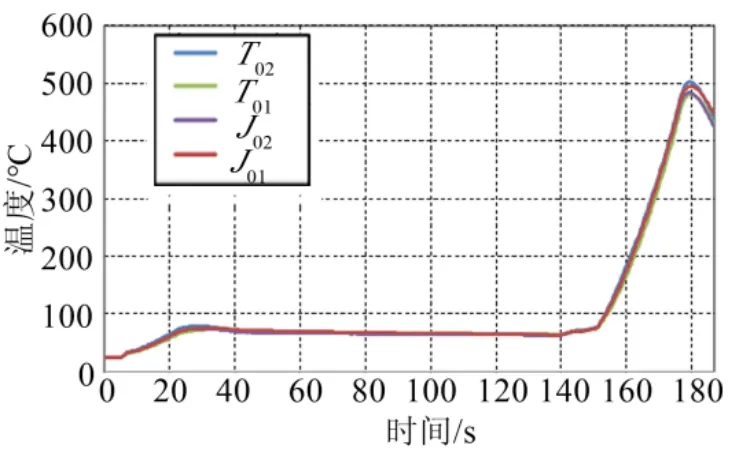
圖3 溫度傳感器輻射加熱試驗結果Fig.3 Results of Radiation Heating Test for Temperature Sensor
由圖3 可以看出,溫度傳感器與熱電偶測量結果的差別不超過5%,說明設計的溫度傳感器可以準確測量艙體表面溫度。
2.1.4 脈動壓力測量方法
為了獲得飛行試驗中邊界層內擾動波的信息,采用高頻壓力傳感器,通過流線追蹤方法對擾動波進行測量:邊界層內擾動波的傳播方向為群速度方向,考慮到邊界層的外緣流線方向與擾動波群速度方向較為接近,將壓力傳感器布置在同一外緣流線上進行壓力測量,如圖4 所示。
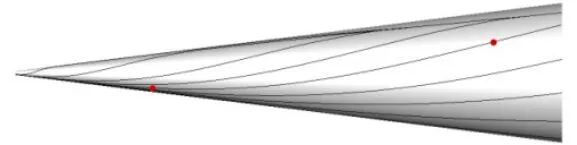
圖4 邊界層外緣流線及脈動壓力傳感器布置示意Fig.4 Outer Edge Streamlines of Boundary Layer and Arra ngement of Pulsating Pressure Sensors
同時,考慮到壓力傳感器在飛行試驗過程中可能存在高溫破壞的風險,為了兼顧壓力傳感器溫度耐受性要求,同時保證壓力傳感器能較為準確地測得轉捩信息,基于流動、轉捩和溫度綜合分析結果,將壓力傳感器進行下陷安裝,下陷量綜合轉捩測量要求的約束和溫度評估結果確定。
2.2 測點布置方案研究
文獻[12]、[13]給出了某圓錐外形在小攻角下的DNS 轉捩預示結果,文獻[14]給出了Reentry-F 在小攻角下的轉捩預示結果,表明圓錐外形在有攻角下的轉捩陣面形貌較為復雜。為保證轉捩陣面形貌的精細捕捉,在考慮結構安裝空間約束的條件下形成了密集的測點陣列,傳感器軸向間距50 mm,周向間距15°或30°,如圖5 所示,測點數目超過200 個,其中48 個熱流測點、2 個脈動壓力測點,其余為溫度測點,測點數量顯著超過國外Reentry-F(測點總數36 個)和HIFiRE-1(測點總數86個)相似外形的轉捩飛行試驗。
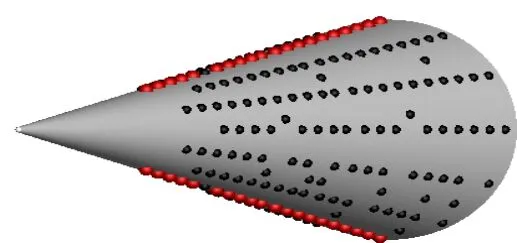
圖5 圓錐外形測點布置方案Fig.5 Measurement Scheme of Cone
2.3 驗證器表面階差控制研究
邊界層轉捩對飛行器表面狀態(如粗糙度、局部臺階、縫隙、凸起、凹陷等型面階差)非常敏感,過大的粗糙度和局部型面階差尺度可能對邊界層轉捩產生影響,例如可能導致發生Bypass 轉捩,從而使轉捩測量結果偏離預期的光滑表面的自然轉捩。圓錐外形驗證器表面存在2 種類型面階差:一是不同艙段對接形成的臺階,如圖6 所示;二是安裝的傳感器與驗證器表面不共型形成的局部凸起/凹陷,如圖2 所示。
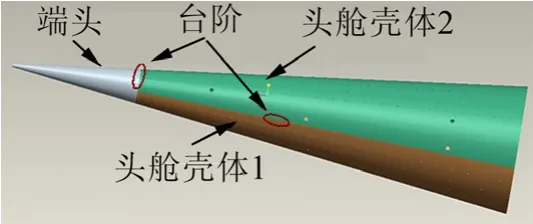
圖6 艙段對接臺階示意Fig.6 Schematic Diagram of the Connection Steps between Cabins
2.3.1 艙段對接臺階控制
考慮到目前的理論分析手段還難以準確地、定量地評估階差尺寸對轉捩的影響,本文根據階差尺寸對轉捩影響的國內外地面(靜)風洞試驗結果,確定了以階差尺寸不超過邊界層厚度的1/8 作為不會對轉捩產生影響的約束條件。
針對艙段對接形成的臺階,采用“端頭+上下分瓣”設計,減小了艙段對接臺階出現的數量。另外對臺階尺寸進行控制,考慮到驗證器在飛行過程會產生熱變形(見圖7,圖中變形量進行了放大處理),提出了一種結構加工預置臺階與結構變形量相抵消的臺階高度控制方法,如圖8 所示,有效減小了飛行過程中艙段對接臺階的高度,降低了臺階對轉捩測量的影響。
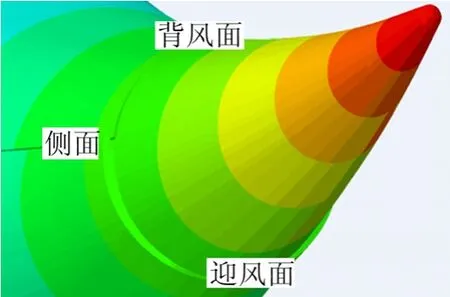
圖7 驗證器結構熱變形示意Fig.7 Schematic Diagram of Thermal Deformation of the Vehicle Structure
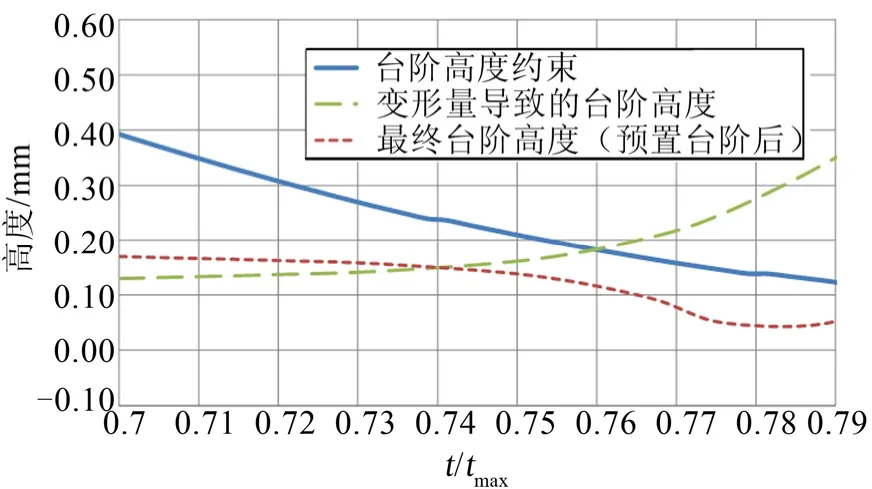
圖8 臺階高度控制方法Fig.8 Control Method of Step Height
2.3.2 傳感器安裝不共型控制
針對傳感器安裝形成的不共型階差,提出了一種創新的傳感器安裝工藝,配合階差光學測量儀進行檢測,進一步降低傳感器安裝不共型偏差。圖9 給出了傳感器安裝凹凸量的測量結果,傳感器與艙體的不共型偏差控制在0.1 mm(該值為迎風中心線靠前位置的階差尺寸的約束值)以下,有效降低了對轉捩測量的影響。
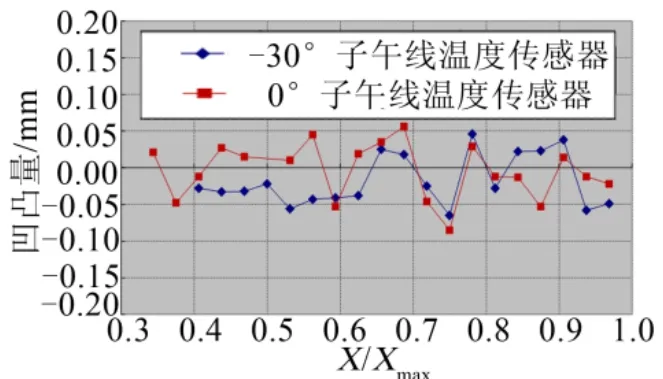
圖9 傳感器安裝凹凸量測量結果Fig.9 Results of Control of Sensor Installation Unevenness
3 飛行試驗實現及測量結果分析
3.1 飛行試驗概況
圓錐外形飛行試驗獲得圓滿成功,飛行器姿態控制良好,測量窗口內>6,轉捩測量方案成功通過驗證,獲取了所有測點的測量數據。
3.2 飛行剖面實現情況
飛行試驗剖面參數曲線如圖10 所示,飛行高度最高點約60 km,最大接近7,測量窗口(40~20 km)歷時超過20 s。在測量窗口內,均超過6,攻角和側滑角控制很好,分別保持在10°和0°左右。
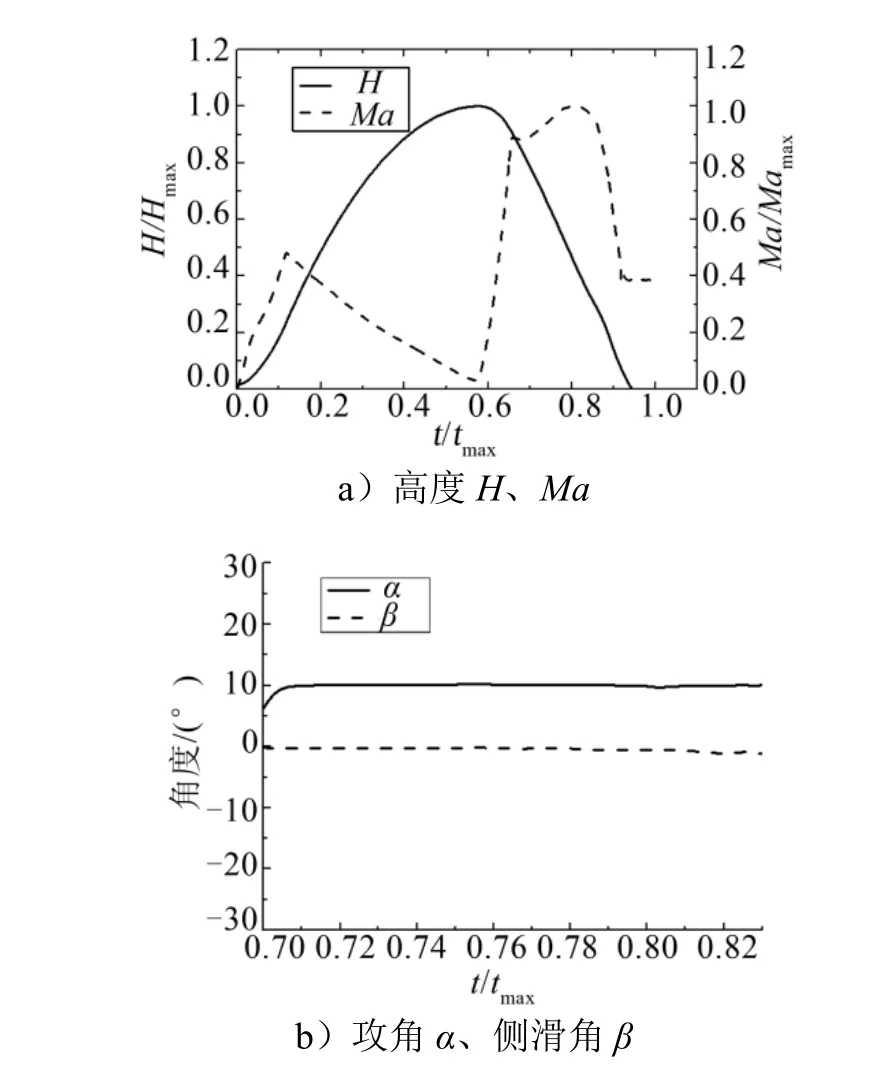
圖10 飛行剖面參數曲線Fig.10 Parameters of Flight Trajectory
3.3 轉捩測量結果及分析
圖11 給出了部分熱流和溫度測量結果。
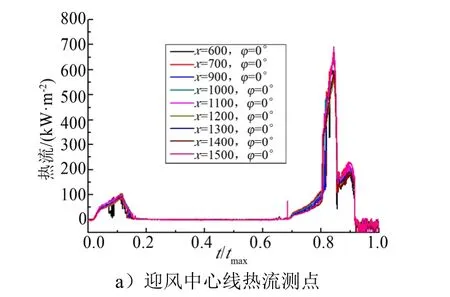
圖11 部分表面熱流和溫度測點測量結果Fig.11 Partial Measurement Results of Surface Heat Flux andTemperature
續圖11
由圖11 可以看出:熱流和溫度傳感器工作正常,沒有出現由于傳感器損壞而導致的數據自身異常現象,且測量結果正確反映了飛行特征(高度、、攻角)的變化和流態的變化,說明了傳感器測量數據有效、規律正常,可以用來開展轉捩分析。
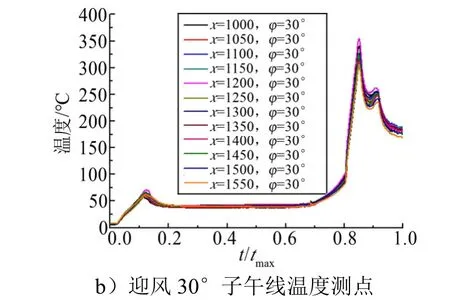
圖12 給出了部分測量結果及轉捩情況分析。圖12a 為轉捩測量窗口內迎風中心線3 個測點沿飛行剖面的熱流測量結果(圖中“0-600”表示在0°子午線,軸向坐標為600 的測點,下圖同),結合圖10 的飛行剖面參數曲線可知,測點熱流在飛行器姿態(攻角和側滑角)未發生變化的情況下發生急劇增長,由此可以判斷測點位置處的邊界層發生轉捩,且隨著飛行高度的降低,邊界層轉捩呈現出由后至前依次推進的規律。圖12b 為飛行器上升過程中的熱流測量結果,此處的飛行器姿態也未發生明顯變化,而測點熱流出現急劇下降,由此判斷測點位置處的邊界層發生再層流化(即發生由湍流流態到層流流態的變化),且隨著飛行高度的升高再層流化由前至后依次出現,與轉捩推進的過程恰好相反。以圖12a 和圖12b 為代表的測點測量結果規律正常,隨著飛行高度的變化,不同位置的轉捩呈現出有規律的依次變化的特性,未出現測點轉捩同時發生的現象,說明前述的飛行器表面階差尺寸控制方法的合理性。得益于高密度測點布置,本次飛行試驗首次獲取了圓錐外形高速有攻角狀態下轉捩過渡區的飛行試驗數據,如圖12c 所示,可以清晰地看出層流-轉捩過渡區-湍流的整個轉捩過程,轉捩后湍流熱流約為層流的3 倍。圖12d 為本次飛行試驗首次成功獲取的高速飛行嚴酷氣動加熱環境下的脈動壓力測量數據,脈動壓力能夠反映邊界層發展演化過程,可為邊界層轉捩的理論研究提供寶貴的支撐。高密度測點陣列確保了轉捩陣面型貌的測量,本次飛行試驗首次成功獲取了7°圓錐在高速、10°攻角下的轉捩陣面型貌,如圖12e 所示。

圖12 測量結果及轉捩情況分析Fig.12 Measurement Results and Transition Analysis
圖13 給出了圓錐外形表面極限流線和無粘流線,隨著周向角度增大(除背風面分離區外),流動的橫流效應逐漸增強,由于有攻角圓錐流動的流向和橫流不穩定性的共同作用,導致轉捩陣面沿周向角度增大的方向呈現出先向后然后轉折向前的形貌。
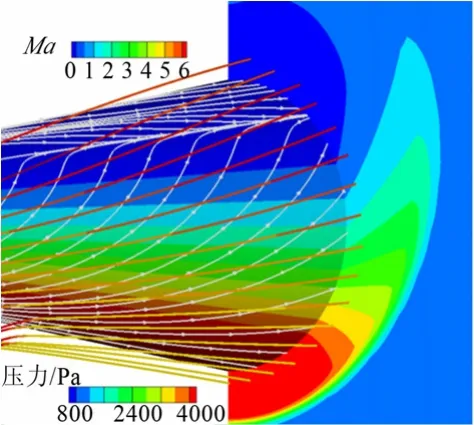
圖13 表面極限流線與無粘流線Fig.13 Surface Limiting Streamlines and Inviscid Streamlines
本次飛行試驗獲取了海量寶貴的飛行試驗數據,對于轉捩測量數據的詳細分析和研究將另文討論。
4 結 論
本文介紹了圓錐外形高速飛行試驗轉捩測量技術研究工作和飛行試驗驗證的情況,獲得的結論如下:
a)牽引研制了耐高溫的小型化高精度溫度和熱流傳感器,建立了嚴酷氣動加熱環境下脈動壓力測量方法,飛行試驗結果表明測量數據有效、規律正常;
b)基于小型化傳感器和測點布局方案研究,實現了大規模高密度測點的精細化轉捩測量方案,測點數目超過200 個,飛行試驗結果表明所有傳感器工作正常,獲取了全部有效數據;
c)開展了表面臺階和傳感器安裝不共型偏差精確控制研究,可以有效減小飛行過程中表面階差高度,降低其對邊界層轉捩測量的影響,飛行試驗結果證明了該方法的有效性;
d)飛行試驗首次獲取了高速有控條件下特定姿態的圓錐基礎外形的轉捩陣面精細型貌、轉捩推進過程和脈動壓力特性等寶貴的測量數據,通過測量數據分析,提升了對圓錐外形轉捩現象及規律的認識。