基于ADVISOR插電式混合動力汽車整車性能的仿真
2022-08-26 03:03:56趙林林陳曉川武濤
機械工程師 2022年8期
趙林林,陳曉川,武濤
(江蘇財經職業技術學院,江蘇淮安 223003)
0 引言
目前,插電式混合動力汽車作為傳統燃油汽車向純電動汽車發展過渡的產品,因為電池技術的不成熟,插電式混合動力汽車將在很長時間內發揮重要的作用。此項技術已有很多專家在開展研究[1-11],但是因為起步較晚,還需要持續深入研究混合動力汽車。本文研究的插電式混合動力汽車采用混聯式動力總成,此類總成類型兼顧了串聯式和并聯式的優點,但是結構復雜,有發動機和電動機兩個能量源,因此為提高此類動力總成類型的能量利用率和降低復雜程度,利用ADVISOR軟件對插電式混合動力汽車進行仿真,并對其進行仿真結果分析。
1 插電式混合動力汽車的主要參數
以某款混聯式插電式動力汽車的整車參數為例,整車的主要技術參數和設置的主要性能指標如表1所示。

表1 插電式混合動力汽車主要參數及性能指標
2 插電式混合動力汽車的主要部件選擇
2.1 發電機
2.2 電動機
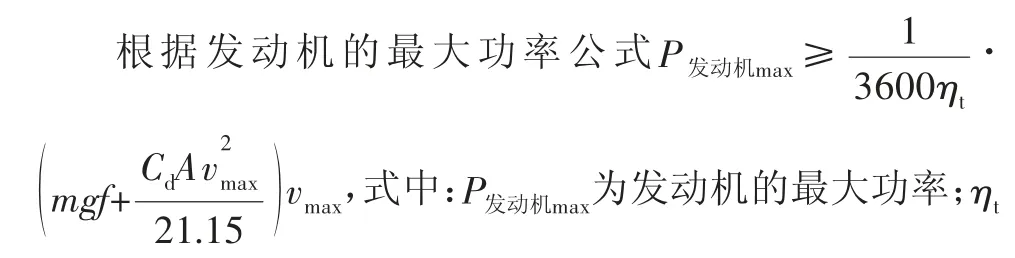
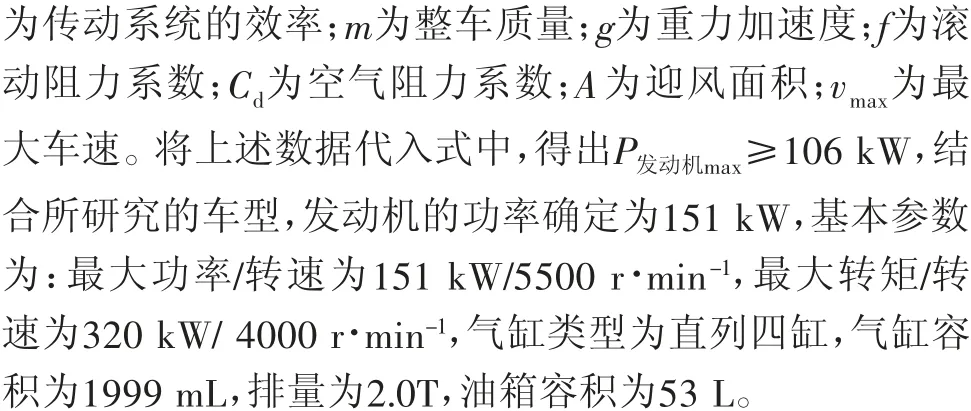
電動機參數的選擇需要考慮最大車速vmax、爬坡度和v0-vt的加速時間t等,需要計算電動機的額定功率和額定轉速,考慮插電式混合電動汽車在純電動模式下的工作情況,考慮3種情況,分別是:根據最高車速確定最大功率;根據爬坡性能確定最大功率;由加速性能來確定最大功率。
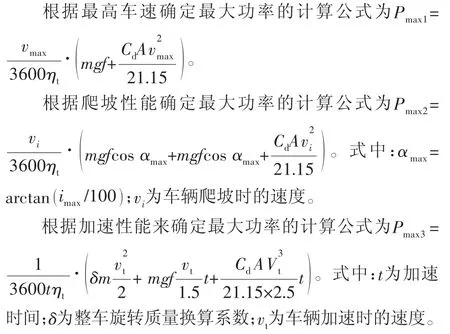
然后根據動力性3項指標計算各自的最大功率,Ptotal≥Pmax=max(Pmax1,Pmax2,Pmax3),Ptotal為電動機的最大功率。
2.3 動力電池
動力電池選擇鋰離子電池,經過計算得出鋰離子電池的能量為18.4 kW·h,電池容量為26 Ah。
3 基于ADVISOR對插電式混合動力汽車的仿真
3.1 ADVISOR軟件簡介
ADVISOR 軟件是由美國可再生能源實驗室在MATLAB和Simulink軟件環境下開發的高級車輛仿真軟件,主要采用后向仿真對整車進行仿真,可以利用軟件自帶的子模塊來設計所需要的車型并進行仿真,還可以通過軟件源代碼的修改來設計需要的子模塊。其中,子系統包含發動機、發電機、電動機、動力分配機構、汽車動力學與能量控制策略等模型,能夠保證精確的仿真結果。
3.2 設置整車仿真參數
1)整車仿真參數設置。本文采用GUI界面對整車仿真參數進行設置,可以通過GUI界面進行設置相關參數,選擇單位為metric,選擇軟件自帶的Prius_Jpn仿真,首先設置整車參數:整車質量m為2250 kg,空氣阻力系數Cd為0.37,迎風面積A為3.013 m2,軸距為2820 mm。電動機vechile,選擇VEH_Prius_JPN,然后在文件下修改如下參數:
veh_glider_mass=2250; % (kg), 整車裝備質量
veh_CD=0.37; % (--), 車輛風阻系數
veh_FA=3.013; % (m2), 車輛的迎風面積
veh_wheelbase=2.82;% (m), 車輛的軸距
設置好PHEV整車參數,另存為PHEV_SUV_tang,然后選擇此文件。整車參數輸入界面如圖1所示。
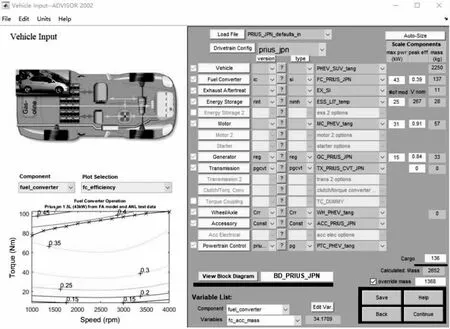
圖1 整車參數輸入界面
2)驅動控制參數設置。設置驅動控制參數:動力電池最高SOC值為0.9,最低SOC值為0.3,SOC目標值為0.5。點擊Powertrain Control,選擇PTC_PRIUS_JPN,然后點擊View/Edit M-file,打開文件,對參數進行修改:
cs_hi_soc=0.9; % (--), 動力電池最高SOC值
cs_lo_soc=0.3; % (--), 動力電池最低SOC值
cs_target_soc=0.5;%動力電池SOC目標值
然后另存為PTC_PHEV_tang文件,選擇此文件。
3)電動機參數設定。點擊Motor,選擇MC_PRIUS_JPN,然后點擊View/Edit M-file,打開文件,對電動機參數進行修改:
mc_max_crrnt=110;%電動機最大功率為110 kW
mc_min_volts=40;%電動機最小功率為40 kW。
然后另存為PTC_PHEV_tang文件,選擇此文件。
4)車輪/車軸參數設定。點擊wheel/axle,選擇WH_PRIUS_JPN,點擊View/Edit M-file,打開文件,對參數進行修改:
wh_radius=0.22; %車輪直徑為0.22 m
另存為WH_PHEV_tang文件,然后選擇此文件。
再設置其他的部件參數:在輸入窗口的右側頂端,分別設置發動機、發電機、動力電池等參數,如表2所示,設置參數如圖1所示。
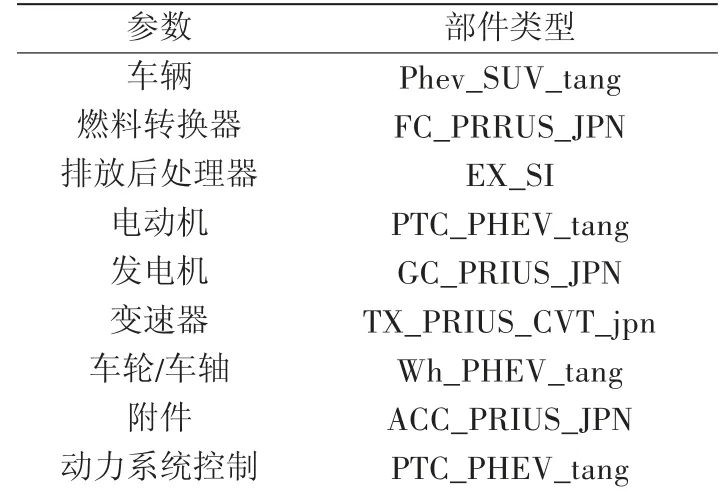
表2 選擇插電式混合動力汽車部件類型表
3.3 設置仿真任務
完成整車參數設置后,點擊continue,如圖2所示,在循環工況中設置次數1。
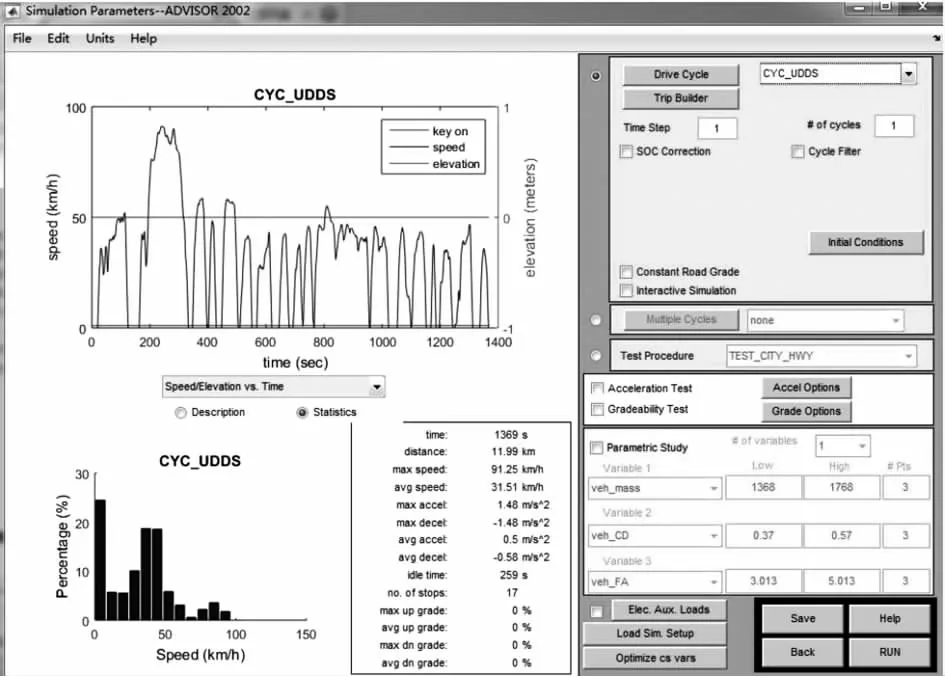
圖2 仿真參數界面
循環行駛工況設定城市道路工況CYC_UDDS 和CYC_NEDC兩種循環工況,循環周期為1,其他參數不變,進行仿真;單擊“Initial Conditions”對整車初始值進行設置,其中動力電池組SOC初始值為1,空氣阻力系數為1009;單擊“Acceleration Test”設置加速度性能參數,其中換擋延遲時間設置為0.2,整車質量值為2250 kg,加速時間設置靜止起步到50 km/h、100 km/h,并選取汽車最大速度和最大加速度,然后單擊“RUN”。
3.4 分析仿真結果
根據上面建立的PHEV仿真模型,進行仿真后得到此車模型的動力性能指標、整車百公里油耗、動力電池SOC值變化等數據。
1)城市道路工況CYC_UDDS的仿真結果。如圖3所示,第一幅圖為速度仿真曲線,描述車速跟隨循環工況的運行曲線,通過圖中可以看出該插電式混合動力汽車的實際車速能夠很好地跟隨循環工況車速,最高車速為124.4 km/h。第二幅圖為SOC值仿真曲線,描述了能量存儲系統的SOC的變化曲線,從圖中可以看出,在1個循環工況下,SOC值從設定的起始值0.7,最后下降到0.45附近趨于穩定,波動范圍變化不大,充放電過程穩定,汽車整體處在電動機驅動或混合驅動狀態下,保證整車的穩定性和延長電池使用壽命。同時,該插電式混合動力汽車在1個循環工況下,行駛了12 km,燃油經濟性為5.7,0~50 km的加速時間為5.2 s。第三幅圖為排放性能曲線,其中HC排放量為0.683,CO排放量為0.745,NOx排放量為0.147。從圖中可以看出在混合驅動下,排放量相比傳統的車型下降顯著,甚至在純電動模式下達到了零排放,體現了插電式混合動力汽車的優勢。
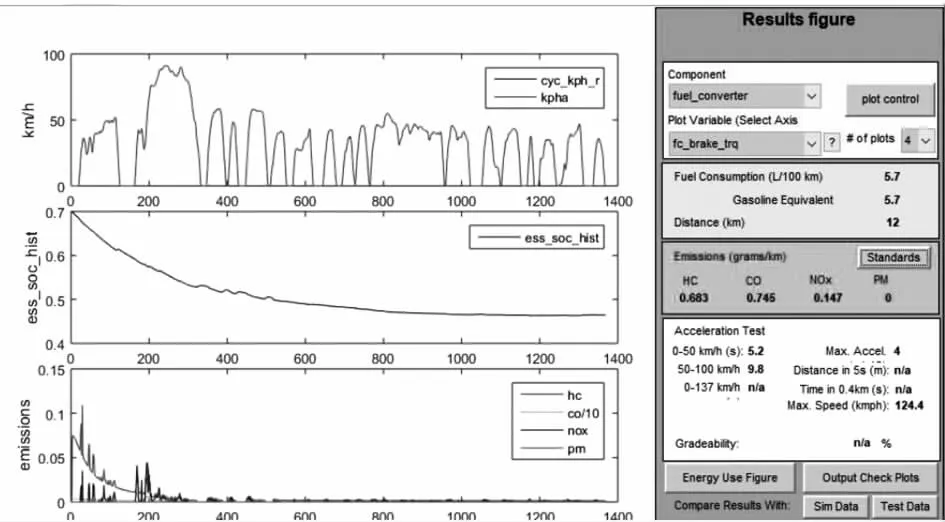
圖3 城市道路工況CYC_UDDS的仿真結果
2)城市道路工況CYC_NEDC下的仿真結果。如圖4所示,在此循環工況下,通過第一幅圖速度仿真曲線,可以看出該插電式混合動力汽車的實際車速能夠很好地跟隨循環工況車速,最高車速為124.4 km/h,和上一個循環工況一致。通過第二幅圖SOC值仿真曲線,可以看出在1個循環工況下,SOC值從設定的起始值0.7,最后下降到0.45附近,然后又略有上升,波動范圍變化不大,充放電過程穩定,汽車整體處在電動機驅動或混合驅動狀態下。同時,該插電式混合動力汽車在1個此類循環工況下,行駛了10.9 km,燃油經濟性為6.5,0~50 km,加速時間為5.2 s。通過第三幅圖排放性能曲線,其中HC排放量為0.745,CO排放量為0.729,NOx排放量為0.115。從圖中可以看出在混合驅動下,此循環工況下,排放量比上一個循環工況下要多一些,在純電動模式下幾乎達到了零排放。
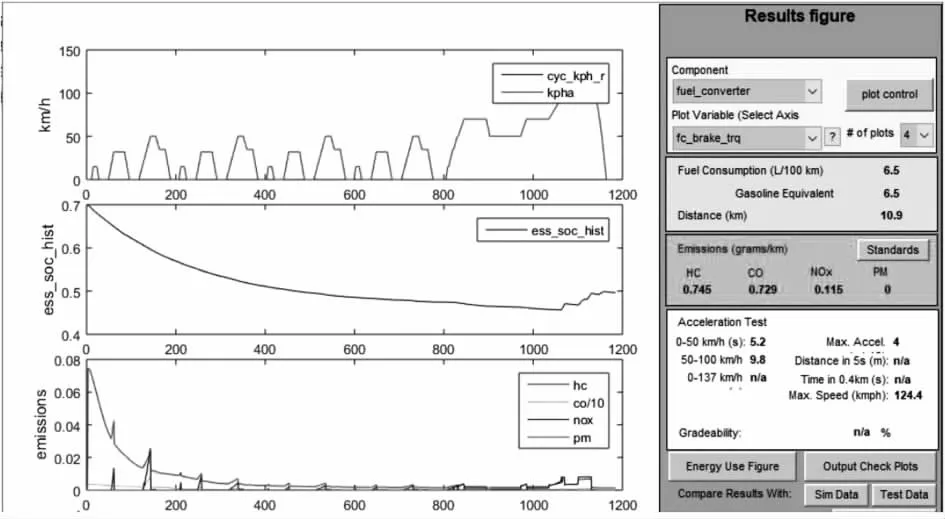
圖4 城市道路工況CYC_NEDC下的仿真結果
4 結論
以某車型為參照對象,對其關鍵部件進行了選型和設計。采用ADVISOR仿真軟件,建立插電式混合動力汽車分配機構——行星齒輪傳動機構的仿真模型,修改其中的M文件,對其進行開發,對發動機、電動機和電池等參數進行設置,在兩種循環工況下進行仿真分析,通過分析仿真,得出插電式混合動力汽車的動力仿真輸出結果,分析各項參數,為整車設計開發提供依據。
猜你喜歡
少先隊活動(2021年4期)2021-07-23 01:46:22
汽車與安全(2019年9期)2019-11-22 09:48:03
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
決策探索(2014年21期)2014-11-25 12:29:50
中國艦船研究(2014年5期)2014-05-14 06:43:09
都市快軌交通(2014年4期)2014-02-27 08:35:05