基于視覺的汽車駕駛員疲勞檢測系統設計研究
2022-08-27 10:17:12曹衛
科教導刊·電子版 2022年17期
曹 衛
(廈門理工學院計算機與信息工程學院,福建 廈門 361005)
1 研究背景
疲勞駕駛是引發交通事故的一個重要因素。在法國,因疲勞駕駛導致的意外占人身傷害事故的14.9%,死亡事故的20.6%。我國每年因道路交通傷亡人數居世界首位,而且以每年10%的速度遞增,疲勞駕駛所導致的交通事故也以相當快的速度遞增。以北京為例,因疲勞所導致的交通事故占到事故總數的20%以上[1]。因此,如何有效避免疲勞駕駛是當前各國研究人員關注的熱點。
對駕駛疲勞的判定識別是一個很復雜的問題。早期對駕駛疲勞進行識別主要利用了主觀監測方法。它利用自我調查表、睡眠習慣調查表、斯坦福睡眠尺度表和皮爾遜疲勞度量表來評定駕駛員的疲勞程度[2]。主觀監測方法識別駕駛疲勞實際上是根據駕駛員的持續駕車時間進行判定[3]。但是主觀監測方法在設定時間標準時,沒有考慮到駕駛員的個體差異性,比如駕駛員體質、開車前的精神狀態、生活飲食情況、是否患病等,因此主觀監測的結果隨駕駛員個體差異變化很大。為了更加準確地檢測駕駛疲勞,研究人員從駕駛員疲勞時表現出的客觀反應出發,對疲勞進行了更深入的研究。對駕駛疲勞客觀反應的研究表明,反映疲勞的客觀特征可以歸結為駕駛員的生理信號、駕駛員的物理反應和車輛行駛時的相關參數。與此相對應的客觀疲勞檢測方法包括基于駕駛員生理信號的疲勞檢測、基于駕駛員視覺特征的疲勞檢測和基于車輛行為的疲勞檢測[4]。
由于基于視覺的非接觸式檢測方法不會對駕駛員的駕駛操作造成影響,相比于接觸性檢測方法還具有實時監測、性價比高的優點,因此本研究依據基于視覺的疲勞檢測原理實現駕駛疲勞檢測。
2 基于視覺特征的疲勞檢測原理
基于視覺的疲勞檢測是指通過圖像傳感器獲取駕駛過程中的視覺特征,根據駕駛員在正常狀態和疲勞狀態的特征模式不同,對駕駛員的精神狀態進行分類,從而檢測到是否有疲勞產生。PERCLOS是公認的、有效的精神生理疲勞程度的測量指標,它不僅有很高的準確率并且不會對駕駛操作產生影響。本系統選擇 PERCLOS作為疲勞駕駛的判定方法。
經研究發現,一般情況下人眼的閉合時間在0.2~0.3s之間,若汽車駕駛員在行車過程中眼睛閉合時間達到0.5s就很容易發生交通事故[5]。PERCLOS(Percentage ofEyelid Closure Over the Pupil Over Time)是由賓夕法尼亞大學智能交通實驗室和NHTSA提出的概念,它定義為眼睛閉合時間占某一特定時間的百分率。從此 PERCLOS值是精神生理疲勞程度的測量指標,廣泛應用于駕駛員疲勞檢測的研究中。眼睛的生理特點與疲勞駕駛有關系是通過監視駕駛員眼睛的閉合持續時間與事故的關系來判斷的,如圖1所示:
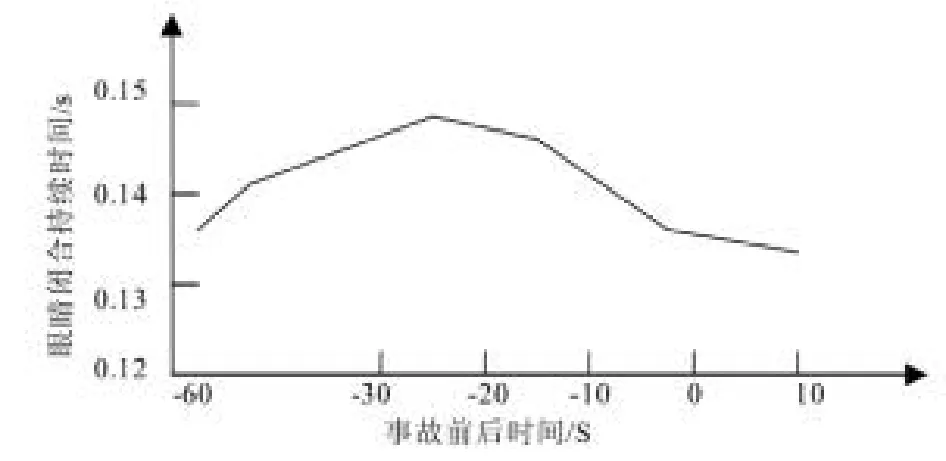
圖1 眼睛閉合持續時間與事故的關系
實驗結果表明:眼睛閉合持續時間在事故前比在事故后要大,而在事故前 10秒,突然變短,眼睛閉合持續時間與疲勞程度有密切的關系,眼睛閉合持續時間在事故之前1分鐘比起其他時間要大得多。因此通過測量眼睛閉合持續時間的長短就能夠確定駕駛疲勞的程度。
PERCLOS法有三種判定標準,分別是P70、P80和EM。P70表示瞳孔被眼瞼縱向遮住70%的時間比率;P80表示遮住80%的時間比率;EM表示眼瞼均方閉合率。通過實驗,研究人員發現P80與疲勞程度間的相關性最好。因此,系統采用P80作為駕駛員疲勞程度檢測裝置的判定標準。
3 系統設計方案
3.1 疲勞檢測系統設計方案
系統基本設計思想是通過帶有近紅外光源的CCD或CMOS攝像機連續采集駕駛員頭部圖像,利用人眼對近紅外光的生理反應作為尋找眼睛的可視特征,經過圖像處理模塊和一定算法找到可視特征的位置,即完成駕駛員眼睛的定位,再通過提取人眼的特征參數分析眼睛的開閉狀態,計算出PERCLOS值,據此判斷駕駛員是否疲勞[6]。
根據系統的設計思想,整個系統從功能上主要可分為三個模塊:圖像采集模塊、圖像處理模塊和報警模塊,如圖2所示。圖像采集模塊是由近紅外光源和模擬攝像機組成。采集到的模擬信號,經A/D轉換器變成數字信號,然后送入以DSP為核心的圖像處理模塊中進行運算處理,最后報警模塊根據計算結果判斷是否發出警報。

圖2 系統功能模塊框圖
3.2 疲勞檢測裝置設計
疲勞檢測部分通過把一臺智能手機安裝在汽車內中央后視鏡上或者固定于駕駛員正前面上方,在不影響駕駛員視線情況下,采集駕駛員的人臉圖像信息,見圖3。然后把采集的圖像信息通過手機的4G網絡傳輸到云服務器。在云服務器端通過檢測駕駛員眼皮下垂程度來判斷駕駛員是否處于疲勞駕駛狀態,通過記錄駕駛員眼球活動頻率,來判斷駕駛員生理活動狀態,如駕駛員眼球長期不移動,或者閉眼時間過長,系統則判斷其處于疲勞駕駛狀態,云服務通過4G網絡向手機端發出警報信號,手機,E端再通過藍牙信號驅動震動提醒裝置提醒駕駛員。疲勞檢測系統架構見圖4。同時云服務器將產生一條記錄,記錄駕駛員的姓名,發生疲勞駕駛的時間、地點、次數等,作為以后駕駛員考核的依據。疲勞檢測運行示意圖見圖5。

圖3 系統裝置圖
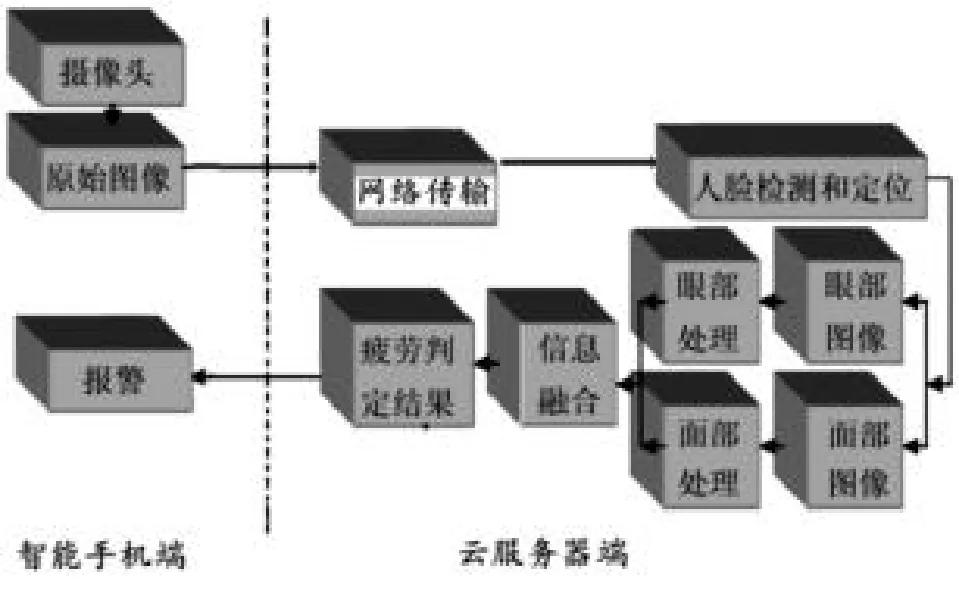
圖4 疲勞檢測系統架構
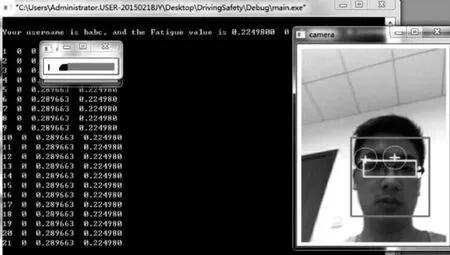
圖5 疲勞檢測運行示意圖
3.3 疲勞檢測流程
疲勞檢測由Android手機端和云服務器兩部分組成,通過手機的4G網絡實現兩部分的通信,達到實時檢測駕駛員是否進入疲勞駕駛狀態。其系統流程圖如圖6所示。
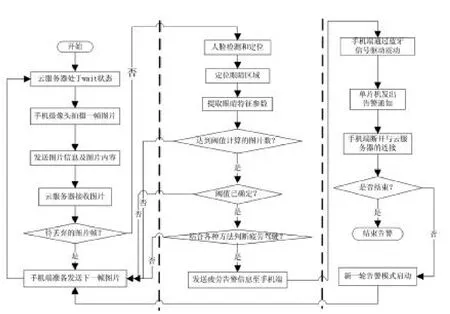
圖6 疲勞檢測流程圖
3.4 疲勞預警系統
語音識別與聲控軟件系統將采用云運算技術,用戶在車聯網上不需安裝語音識別軟件便可完成語音控制功能。為了降低網絡傳輸數據量,當用戶啟用聲控功能后,其語音信號將先轉換成第四代(4G)語音通信標準之適應性多重比特率(Adaptive Multi-Rate,AMR)語音編碼格式,然后再傳至云服務器進行語音識別,在本研究中將直接從AMR語音編碼格式中擷取語音特征參數并進行語音識別的技術,借以提升語音識別運算效率與準確度,圖7為其系統方塊圖。
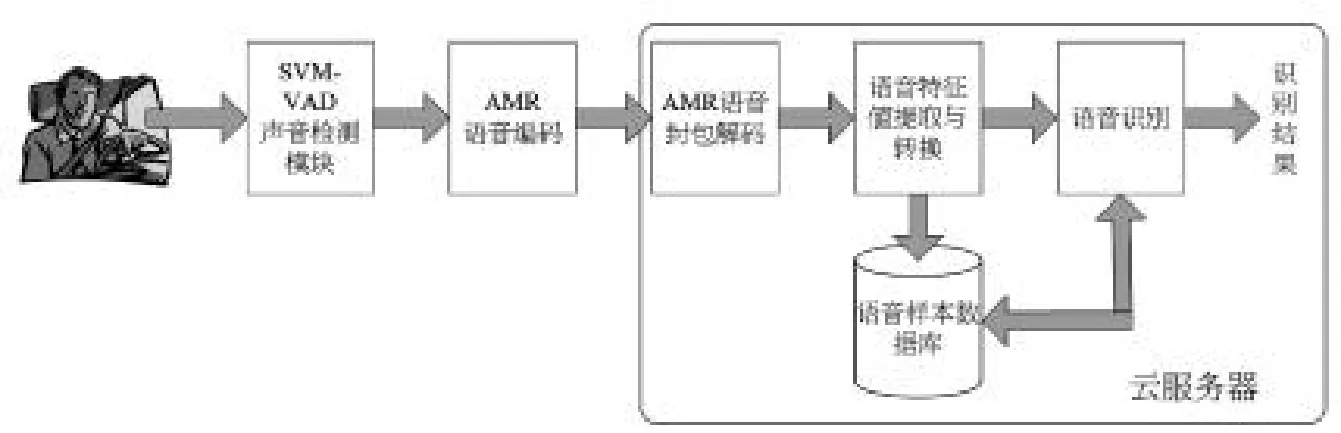
圖7 云語音識別系統方塊圖
報警系統是由蜂鳴器、三極管和電阻組成的,電路圖如圖8所示。報警系統是由DSP的GPIO口控制,當判定駕駛員處于疲勞狀態時,則系統調用GPIO的程序,使其輸出3.3V電壓,驅動蜂鳴器發出聲音。GPIO口選用的是標號為59的端口,通過一個電阻和一個NPN型的三極管與蜂鳴器相連。當DSP為高電平是,蜂鳴器發出警報聲;當DSP為低電平時,蜂鳴器不發出聲音。
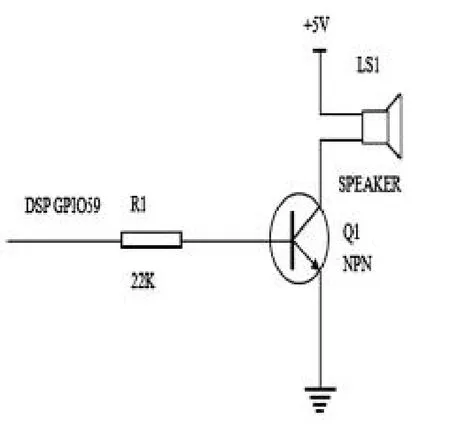
圖8 報警電路
4 疲勞檢測系統展示
疲勞檢測系統是利用安卓手機作為終端,和云服務器。在智能手機端開發能相應的APP模塊。該APP整合了駕駛員的疲勞檢測和動導航終端,負責通過手機4G網絡適時傳輸駕駛員人員圖像和駕駛員需要導航目的地的語音,云服務器收到駕駛員傳送的人臉圖像后,進行人臉識別,眼睛區域提取,并判斷是否有疲勞出現,如有疲勞出現則由云服務器向手機端發出提醒,手機收到提醒信號后,通過藍牙向單片機模塊發向震動信號,以提醒駕駛員去服務區休息。疲勞檢測系統如圖9所示。利用手機的前置攝像頭實時抓取駕駛員的人臉圖像,以每秒3幀的速度通過手機4G網絡向云服務發送。圖10是利用單片機接收手機藍牙信號控制步進電機實現模擬提醒駕駛員的目的。

圖9 駕駛員疲勞檢測系統

圖10 疲勞提醒模塊
5 結論
針對疲勞駕駛識別應用的實際需求,本文介紹了一種基于視覺的汽車駕駛員疲勞檢測裝置設計。本研究確定了整個疲勞檢測系統的框架,包括系統采用的檢測方法、系統的硬件結構和軟件工作流程。整個系統能對駕駛員的疲勞狀態進行判斷,如果檢測出駕駛員處于疲勞駕駛中,系統會發出報警聲,提醒駕駛員注意行車安全。該研究對于提高道路交通安全具有較為重要的指導意義,具有較大的應用價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12