安卓智能手機GNSS數(shù)據(jù)篩選方案研究
2022-08-30 05:55:42高成發(fā)
大地測量與地球動力學(xué) 2022年9期
甘 露 高成發(fā) 尚 睿
1 東南大學(xué)交通學(xué)院,南京市東南大學(xué)路2號,211189
隨著智能手機的廣泛應(yīng)用,基于智能手機的導(dǎo)航定位服務(wù)已成為人們?nèi)粘=煌ǔ鲂械膭傂琛?016年是Android智能手機GNSS定位元年,Google 公司在I/O開發(fā)者大會上宣布授予開發(fā)者獲取原始GNSS測量數(shù)據(jù)的權(quán)限。2017年歐洲 GNSS 管理局(GSA)發(fā)布在Android智能設(shè)備上使用原始GNSS測量數(shù)據(jù)白皮書,詳細介紹偽距、多普勒和載波觀測值的計算方式。2018年雙頻GPS手機陸續(xù)問世,大量學(xué)者對雙頻GPS智能手機的原始GNSS數(shù)據(jù)質(zhì)量和定位性能進行評估[1-2]。Robustelli等[3]采用直方圖對測地型接收機和智能手機衛(wèi)星信號信噪比進行統(tǒng)計,發(fā)現(xiàn)通常情況下智能手機信噪比要比測地型接收機低5~10 dB-Hz;Wanninger等[4]采用MP組合觀測值方式分析智能手機偽距多路徑效應(yīng),發(fā)現(xiàn)MP組合觀測值與信噪比具有很強的相關(guān)性,但與高度角的相關(guān)性很低;Paziewski等[5]采用CMC組合觀測值方式評估偽距觀測值的噪聲和多路徑效應(yīng),發(fā)現(xiàn)智能手機的偽距噪聲比測地型接收機大一個數(shù)量級。
目前智能手機原始GNSS數(shù)據(jù)質(zhì)量分析大多基于開闊無遮擋場景,針對智能手機中非直射衛(wèi)星信號場景還需進一步分析。因此,本文擬對華為P30、華為P40、小米8三款雙頻智能手機中直射衛(wèi)星信號與非直射衛(wèi)星信號的數(shù)據(jù)質(zhì)量進行重點分析,設(shè)計智能手機原始GNSS數(shù)據(jù)篩選方案,以提高智能手機在復(fù)雜環(huán)境下的定位精度。
1 Android智能手機原始GNSS數(shù)據(jù)質(zhì)量分析
1.1 數(shù)據(jù)采集
實驗評估4臺Android智能手機,分別為2臺小米8手機和2臺華為P系列手機,手機硬件詳細信息如表1所示。MIA08、MIA10、HW30、HW40分別代表Android 8系統(tǒng)小米8手機、Android 10系統(tǒng)小米8手機、華為P30和華為P40手機。

表1 智能手機硬件詳細信息
為分析智能手機在不同環(huán)境下原始數(shù)據(jù)的質(zhì)量和定位性能,在兩個特征明顯的環(huán)境中靜態(tài)采集智能手機原始GNSS測量數(shù)據(jù)。數(shù)據(jù)采集點P1為理想開闊環(huán)境,附近無高大建筑物和樹木;數(shù)據(jù)采集點P2為嚴(yán)重遮擋環(huán)境,北側(cè)為高約60 m的建筑物。
將華測i90測地型GNSS接收機放置于數(shù)據(jù)采集點P1和P2,采集數(shù)據(jù)20 min。將采集點P1和P2靜態(tài)采集的數(shù)據(jù)與基準(zhǔn)站同步觀測數(shù)據(jù)導(dǎo)入商用基線解算軟件中進行解算。基線報告顯示,P1和P2均為L1固定解,P1和P2與基準(zhǔn)站基線的RMS分別為0.028 2 m和0.005 9 m。已知基準(zhǔn)站的精確坐標(biāo),可由基準(zhǔn)站坐標(biāo)和基線向量推算出P1和P2坐標(biāo)精度為cm級。將P1和P2點坐標(biāo)推算至4部手機放置位置坐標(biāo),可作為4部手機靜態(tài)定位的真值。
1.2 GNSS數(shù)據(jù)質(zhì)量分析
1.2.1 可見衛(wèi)星數(shù)量
圖1為數(shù)據(jù)采集點P1和P2的可見衛(wèi)星數(shù)量,其中Rover代表智能手機旁測地型接收機同步觀測的結(jié)果。2臺華為手機的可見衛(wèi)星數(shù)量與接收機相當(dāng),2臺小米手機的可見衛(wèi)星數(shù)量比接收機少11~20顆。MIA10手機可手動打開“強制啟用GNSS測量結(jié)果全面跟蹤選項”,MIA08手機系統(tǒng)不提供此功能,因此MIA10比MIA08在P1點的平均可見衛(wèi)星數(shù)量多9顆。2臺小米手機的可見衛(wèi)星數(shù)量與測地型接收機相近,2臺華為手機的可見衛(wèi)星數(shù)量比接收機多12顆。后續(xù)分析發(fā)現(xiàn),由于智能手機可接收部分非直射衛(wèi)星信號,2臺華為手機在P2點的可見衛(wèi)星數(shù)量多于測地型接收機。
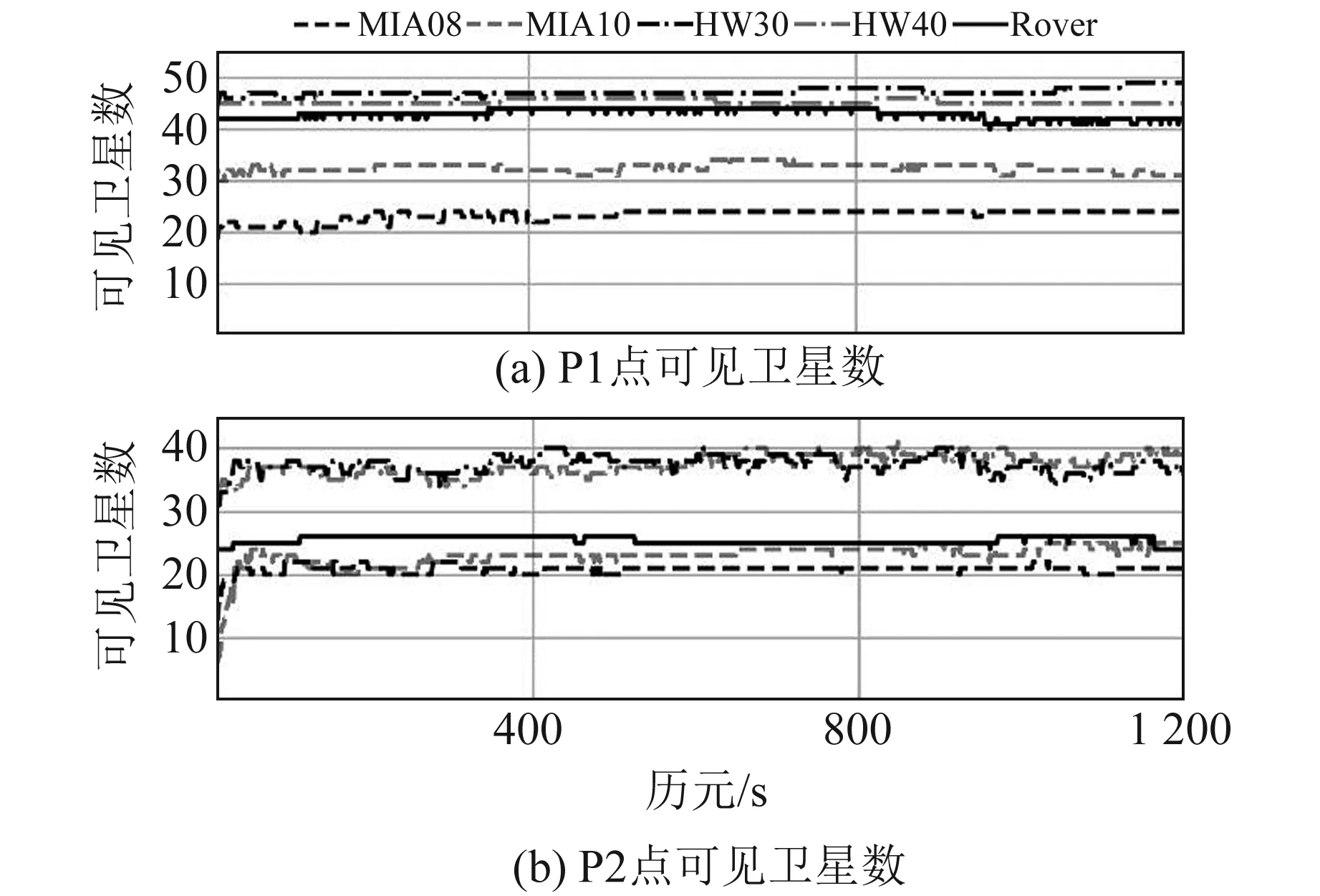
圖1 P1和P2數(shù)據(jù)采集點可見衛(wèi)星數(shù)Fig.1 The number of visible satellites at data collection points P1 and P2
1.2.2 測地型接收機與智能手機信噪比
圖2為P1和P2數(shù)據(jù)采集點4款手機和測地型接收機連續(xù)1 200個歷元的信噪比均值和標(biāo)準(zhǔn)差。在開闊地點P1,智能手機的整體信噪比水平遠遠低于測地型接收機,存在6~11 dB-Hz偏差。在嚴(yán)重遮擋地點P2,智能手機的信噪比均值下降幅度明顯,信噪比標(biāo)準(zhǔn)差也隨之變大。通過對比P1與P2點發(fā)現(xiàn),測地型接收機的信噪比均值降低1.3 dB-Hz,信噪比標(biāo)準(zhǔn)差增大1.4 dB-Hz;智能手機的信噪比均值降低2~7 dB-Hz,信噪比標(biāo)準(zhǔn)差增大2~5 dB-Hz。智能手機的低信噪比均值和高信噪比標(biāo)準(zhǔn)差特征說明,智能手機的GNSS數(shù)據(jù)存在很多低質(zhì)量數(shù)據(jù)信息。

圖2 信噪比與采集環(huán)境關(guān)系Fig.2 The relationship between signal-to-noise ratio and collection environment
1.3 智能手機非直射衛(wèi)星信號特征分析
已知P2數(shù)據(jù)采集點附近高樓建筑物的高度和方位信息,可由衛(wèi)星方位角與高度角直接區(qū)分直射衛(wèi)星信號與非直射衛(wèi)星信號。
1.3.1 非直射衛(wèi)星信號信噪比
當(dāng)直射衛(wèi)星信號受阻時,智能手機接收到的信號為反射衛(wèi)星信號和衍射衛(wèi)星信號。這兩種衛(wèi)星信號與直射衛(wèi)星信號存在不一樣的信噪比特征。圖3(a)為G12衛(wèi)星信號從直射過渡到非直射過程中信噪比的變化情況。G12衛(wèi)星在信號非直射區(qū)域的信噪比均值和標(biāo)準(zhǔn)差分別為23.59 dB-Hz和5.99 dB-Hz,G12衛(wèi)星在信號直射區(qū)域的信噪比均值和標(biāo)準(zhǔn)差分別為40.38 dB-Hz和2.31 dB-Hz,說明直射衛(wèi)星信號與非直射衛(wèi)星信號信噪比特征明顯,能夠采用設(shè)定閾值的方式進行區(qū)分。

圖3 信噪比與衛(wèi)星方位角關(guān)系Fig.3 The relationship between signal-to-noise ratio and satellite azimuth
圖3(b)為MIA10手機所有直射衛(wèi)星信號和非直射衛(wèi)星信號信噪比與方位角散點圖。方位角信息用于區(qū)分衛(wèi)星信號類型,虛點線之間即為衛(wèi)星信號直射區(qū)域。由圖可知,大部分非直射衛(wèi)星信號的信噪比集中在25 dB-Hz以下,直射衛(wèi)星信號信噪比水平明顯高于非直射衛(wèi)星信號。
表2(單位dB-Hz)為4款智能手機直射和非直射衛(wèi)星信號的信噪比均值和標(biāo)準(zhǔn)差。由表可知,華為手機直射衛(wèi)星信號的信噪比均值高于小米手機,4款手機直射衛(wèi)星信號的信噪比標(biāo)準(zhǔn)差相近。根據(jù)表2信息,將4款智能手機的信噪比閾值統(tǒng)一設(shè)定為27 dB-Hz,可剔除1倍中誤差以上的非直射衛(wèi)星信號。信噪比低于27 dB-Hz的信號包含部分直射衛(wèi)星信號,但因信號質(zhì)量差,對定位結(jié)果影響較小。
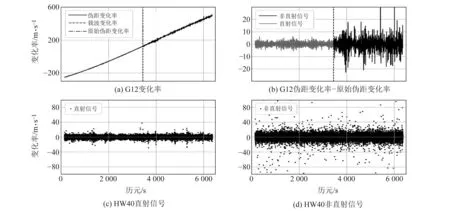
圖4 偽距變化率、原始偽距變化率和載波變化率Fig.4 Pseudorange change rate, original pseudorange change rate and carrier change rate

表2 直射和非直射信號信噪比
1.3.2 偽距單差、載波單差和原始偽距變化率
文獻[6]已對觀測值單差、雙差結(jié)果進行統(tǒng)計分析,本文在此基礎(chǔ)上,將觀測值單差、雙差結(jié)果的單位均統(tǒng)一至m/s,并直接舍棄個別不合理的粗差值。一般情況下,將偽距變化率、載波相位變化率和原始偽距變化率三者的單位換算為m/s后數(shù)值上應(yīng)該近似相等。將間隔為1 s的偽距觀測值之差作為偽距變化率,將間隔為1 s的載波相位之差作為載波相位變化率。載波相位觀測值由API字段累積增量范圍直接獲得,單位為m。偽距變化率和載波變化率計算公式可表示為:
(1)
式中,ΔPk、ΔLk為當(dāng)前歷元的偽距變化率和載波變化率,P、L分別為偽距和載波相位觀測值,k為當(dāng)前歷元序號,k大于1時才能求得變化率。偽距變化率與原始偽距變化率差值的計算公式可表示為:
Δ=ΔPk-Dk
(2)
式中,Δ為偽距變化率與原始偽距變化率的差值,Dk為當(dāng)前歷元的原始偽距變化率,由智能手機直接輸出,單位為m/s。
圖4(a)為G12衛(wèi)星在直射信號和非直射信號下偽距變化率、載波變化率和原始偽距變化率之間的關(guān)系,黑色虛線用于區(qū)分直射信號和非直射信號。在衛(wèi)星信號直射區(qū)域,偽距變化率、載波變化率和原始偽距變化率相近;在衛(wèi)星信號非直射區(qū)域,偽距變化率“抖動”幅度明顯增強。由圖4(b)可知,在衛(wèi)星信號非直射區(qū)域,偽距變化率與原始偽距變化率的差值明顯增大。圖4(c)和圖4(d)為HW40手機直射衛(wèi)星信號和非直射衛(wèi)星信號偽距變化率與原始偽距變化率差值散點圖。由圖可知,HW40手機直射衛(wèi)星信號的偽距變化率與原始偽距變化率差值為-20~20 m/s。
表3(單位m/s)為4款手機直射和非直射衛(wèi)星信號偽距變化率與原始偽距變化率差值的均值和標(biāo)準(zhǔn)差。2款小米手機非直射衛(wèi)星信號變化率差值的標(biāo)準(zhǔn)差約為15 m/s,而2款華為手機非直射衛(wèi)星信號變化率差值的標(biāo)準(zhǔn)差約為5 m/s。非直射信號的變化率差值雖然波動較大,但是存在

表3 偽距變化率與原始偽距變化率差值
部分與直射信號相近的差值難以區(qū)分。將4款手機變化率差值的閾值統(tǒng)一設(shè)定為16 m/s,可以剔除智能手機部分非直射信號,保留智能手機中所有不超過3倍中誤差的直射衛(wèi)星信號。
1.3.3 偽距雙差、載波雙差和原始偽距變化率單差
在§1.3.2基礎(chǔ)上,分析衛(wèi)星偽距觀測值雙差、載波觀測值雙差和原始偽距變化率單差。偽距雙差、載波雙差和原始偽距變化率單差可表示為:
(3)
式中,?Pk、?Lk和ΔDk分別為偽距雙差、載波雙差和原始偽距變化率單差,P為偽距觀測值,L為載波觀測值,D為原始偽距變化率,k為歷元序號,k大于2時才能計算。
圖5為HW40手機G12衛(wèi)星在信號直射區(qū)域與非直射區(qū)域偽距雙差、載波雙差和原始偽距變化率單差的變化情況。由圖可知,在信號非直射區(qū)域偽距雙差、載波雙差和原始偽距變化率單差“波動”明顯增大。

圖5 偽距和載波雙差、原始偽距變化率單差Fig.5 Pseudorange and carrier double difference, original pseudorange change rate single difference
2 原始GNSS數(shù)據(jù)篩選方案
根據(jù)上文數(shù)據(jù)質(zhì)量分析結(jié)果和智能手機原始GNSS測量信息,本文設(shè)計如下智能手機原始GNSS數(shù)據(jù)篩選方案:
1)利用Android API提供的測量狀態(tài)參數(shù)State判斷bits 0和3是否均為1。若均為1則保留該條GNSS測量信息,忽略時間為0或周秒解碼不成功的GNSS測量信息,因其缺少用于計算偽距的衛(wèi)星信號發(fā)射時間參數(shù)。
2)利用Android API提供的載波相位狀態(tài)判斷是否發(fā)生周跳,若發(fā)生周跳則載波觀測值不可用。同時利用Android API提供的多路徑標(biāo)識判斷是否發(fā)生多路徑,若發(fā)生多路徑,則該條測量信息的載波相位和多普勒不可用。
3)不確定度檢核。利用Android API獲取接收衛(wèi)星的發(fā)射時間不確定度、載波相位觀測值不確定度和原始偽距變化率不確定度。根據(jù)經(jīng)驗將三者的閾值分別設(shè)定為500 ns、1 m和1 m/s,剔除觀測質(zhì)量極差的粗差。
4)雙頻校核。智能手機能夠輸出部分GPS和Galileo衛(wèi)星的雙頻衛(wèi)星信號,可通過設(shè)置較大的閾值,使用雙頻觀測值作差法來探測并剔除雙頻偽距與多普勒觀測值中較為明顯的粗差:
(4)
式中,P1與P2為2個波段的偽距觀測值,D1與D2為2個波段的原始偽距變化率。統(tǒng)計P1點4部手機Δ1和Δ2值發(fā)現(xiàn),個別離群值大于30 m和2 m/s,因此將雙頻偽距和原始偽距變化率的較差閾值分別設(shè)定為Δ1=30 m和Δ2=2 m/s。舍棄超過閾值的偽距和多普勒觀測值。
5)根據(jù)§1.3.1分析結(jié)果,將智能手機的信噪比閾值統(tǒng)一設(shè)定為27 dB-Hz。
6)單差檢驗。當(dāng)歷元數(shù)大于2時,設(shè)置偽距變化率與原始偽距變化率差值的閾值來剔除部分非直射衛(wèi)星信號。將變化率差值超過16 m/s的衛(wèi)星信號偽距觀測值設(shè)為不可用。
7)雙差檢驗。當(dāng)歷元數(shù)大于3時,設(shè)置偽距雙差、載波雙差和原始偽距變化率單差的閾值來判斷當(dāng)前歷元的偽距、載波和多普勒觀測值是否可用。偽距雙差、載波雙差和原始偽距變化率單差的閾值根據(jù)經(jīng)驗分別設(shè)定為15 m/s2、1 m/s2和2 m/s2。
3 靜態(tài)定位實驗測試
為驗證智能手機原始GNSS數(shù)據(jù)篩選方案的有效性,對本次實驗評估的4臺手機進行靜態(tài)定位實驗。采用數(shù)據(jù)采集點P2的數(shù)據(jù)進行靜態(tài)定位算法測試,選取SPP和RTK 2種定位算法對智能手機定位性能進行評估,定位實驗設(shè)置如表4所示。表中Y代表使用該項設(shè)置,N代表不使用該項設(shè)置。設(shè)置1和設(shè)置2分別代表采用本文設(shè)計的智能手機GNSS數(shù)據(jù)篩選方案和未采用本文設(shè)計的GNSS數(shù)據(jù)篩選方案。
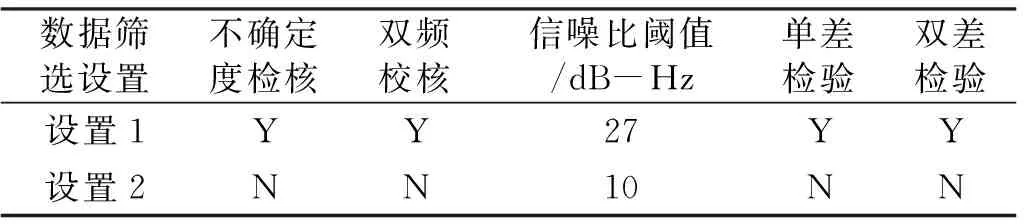
表4 原始GNSS數(shù)據(jù)篩選設(shè)置
偽距剔除率Pr和載波剔除率Cr計算公式可表示為:
(5)
式中,Pn為剔除偽距數(shù)量,Pa為所有偽距數(shù)量,載波同理。
表5(單位%)為基于表4中兩種原始GNSS數(shù)據(jù)篩選設(shè)置條件下4部智能手機的偽距和載波觀測值剔除率情況。
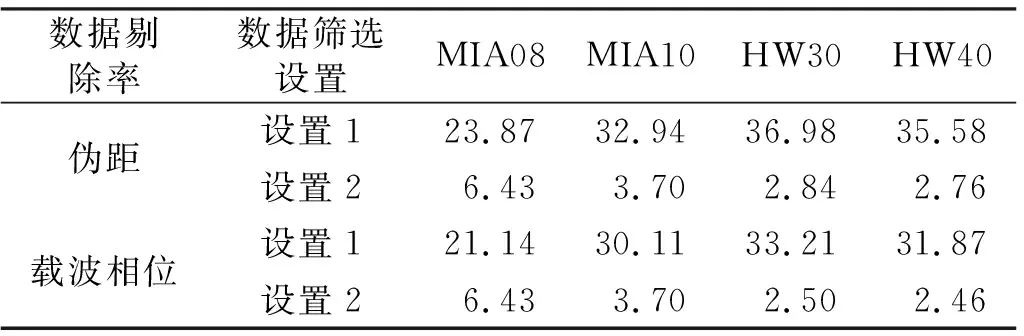
表5 偽距和載波數(shù)據(jù)篩選率統(tǒng)計
在設(shè)置2條件下,由于華為2款手機GLONASS衛(wèi)星系統(tǒng)無載波數(shù)據(jù),偽距和載波剔除率不同。在設(shè)置1條件下,除MIA08外其他3款手機偽距數(shù)據(jù)剔除率均在30%以上,載波相位剔除率比偽距略低。MIA08剔除率偏低可能跟“duty cycle”機制有關(guān)。
本文智能手機定位所采用的SPP算法與文獻[7]中算法相同,RTK算法與文獻[8]中解算模型類似,去除RTK算法待估向量中的速度與加速度參數(shù)即為智能手機靜態(tài)RTK定位解算算法。由于手機載波觀測值數(shù)據(jù)質(zhì)量較差,載波相位周跳占比較高,本文未開展載波相位模糊度固定工作,采用模糊度浮點解。
已知4部智能手機的位置坐標(biāo),表6(單位m)為基于表4中兩種智能手機原始GNSS數(shù)據(jù)篩選設(shè)置條件下4部智能手機靜態(tài)情況下所有歷元SPP算法和RTK算法的定位精度。在數(shù)據(jù)篩選設(shè)置1條件下,4部智能手機SPP定位算法精度在U方向具有較大提升,MIA08手機、MIA10手機、HW30手機和HW40手機U方向RMSE分別提升50.1%、43.8%、36.1%和59.5%。與數(shù)據(jù)篩選設(shè)置2相比,4款手機RTK算法提升幅度較SPP算法小,其中HW40手機RTK定位算法N、E、U方向RMSE分別提升10.9%、22.4%和24.2%。MIA08手機RTK定位算法的平面定位精度略低于SPP定位算法,原因為MIA08手機無法關(guān)閉“duty cycle”機制,導(dǎo)致載波相位跟蹤不連續(xù),前后歷元載波相位觀測值存在周跳,其他3款手機不受“duty cycle”機制影響。對比數(shù)據(jù)篩選設(shè)置1與設(shè)置2可知,智能手機SPP算法和RTK算法的定位精度具有一定提升,說明本文設(shè)計的GNSS數(shù)據(jù)篩選方案有效。

表6 靜態(tài)條件下GNSS定位中誤差統(tǒng)計
4 結(jié) 論
本文將測地型接收機與智能手機置于相近地點同步觀測,分析測地型接收機和智能手機原始GNSS數(shù)據(jù),得到以下結(jié)論:
1) 在高樓遮擋環(huán)境P2點下,智能手機的可見衛(wèi)星數(shù)量大于測地型接收機。智能手機信噪比均值比測地型接收機小9~12 dB-Hz,信噪比方差比測地型接收機大2~6 dB-Hz。智能手機中存在很多低質(zhì)量的GNSS測量數(shù)據(jù)。
2) 智能手機中非直射衛(wèi)星信號與直射衛(wèi)星信號表現(xiàn)出明顯不一致的特征。通過對直射衛(wèi)星信號與非直射衛(wèi)星信號進行統(tǒng)計分析并設(shè)置閾值,可有效區(qū)分直射衛(wèi)星信號與非直射衛(wèi)星信號。
3) 本文設(shè)計的智能手機原始GNSS數(shù)據(jù)篩選方案能夠剔除大部分非直射衛(wèi)星信號和部分低質(zhì)量的衛(wèi)星信號,可提高智能手機靜態(tài)SPP定位算法和RTK定位算法在復(fù)雜環(huán)境下的定位精度。
猜你喜歡
紅領(lǐng)巾·萌芽(2022年9期)2022-11-24 05:55:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
英語文摘(2020年5期)2020-09-21 09:26:30
中國生殖健康(2019年3期)2019-02-01 06:12:26
趣味(語文)(2018年8期)2018-11-15 08:53:00
海外星云(2016年7期)2016-12-01 04:18:00
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
樂活老年(2016年10期)2016-02-28 09:30:37
海軍航空大學(xué)學(xué)報(2015年3期)2015-11-11 17:20:00