無人機攝影測量在房地一體化調查中的應用
2022-08-30 02:40:54王姜華曾娟娟何仁德
科技創新與應用 2022年23期
劉 娣,王姜華,曾娟娟,何仁德
(1.湖南城建職業技術學院,湖南 湘潭 411100;2.湖南智強工程技術有限公司,長沙 410000;3.湖南虹康規劃勘測咨詢有限公司,長沙 410000)
隨著全國各地房地一體化調查項目迅速地開展,無人機攝影測量在房地一體化調查中起到了非常重要的作用[1]。不動產測量是房地調查項目中一項非常重要的工作,大部分不動產測量采用的還是傳統的測量手段,如GPS-RTK、全站儀等,存在的問題有:房子密集、通視效果差,很多地方不易到達。而房地一體化調查項目范圍大,工期緊,因此外業工作量極大,人力成本也高,工期長,效率低等,如果利用無人機攝影測量將在滿足項目技術要求的前提下大大縮短項目工期從而及時完成房地一體化調查項目。
1 無人機航測的應用
無人機航測是指在無人機上安裝航空攝影儀,從空中對地面目標或空中目標進行攝影,獲取航攝像片或數字影像。目前無人機攝影測量的應用涉及面非常廣,對比來看,國外大部分應用于資源管理與環境監測等,像自然資源管理和監測,包括植被監測、高光譜無人機圖像分類和精準農業等;也有環境監測/檢查,包括交通監測、道路跟蹤、森林火災監測和河流監測等行業領域。而國內在工程建設和環境監測方面應用都比較多,尤其是基礎工程建設、智慧城市建設方面,如在智慧城市中利用無人機攝影測量進行三維建模研究。
對比傳統航空攝影測量以及傳統數字測圖手段,無人機航空攝影測量的優勢有:小巧靈活、作業成本低、安全性能高、快速便捷及低空飛行精度高,非常適用于區域面積高分辨率影像的獲取,因此國家測繪地理信息局逐步在全國測繪系統配備并推廣輕小型無人機[2-3]。無人機攝影測量技術能夠快捷地獲取到所需的圖像,有效地提升生產效率,降低工作人員的勞動強度,憑借其優勢,在一些測繪工程中也逐步用無人機攝影測量代替了一些傳統的測量手段[4]。如在道路橋梁工程的前期勘測中,原先采用的是傳統的全站儀結合RTK技術進行數字測圖,由于測量范圍廣,地形復雜,造成測量進度緩慢,有時候甚至會出現測量人員人身安全問題,現在采用無人機攝影測量大大縮短了時間,節約了人力物力。目前無人機攝影測量可以完成1∶500數字測圖,并且也有案例成功將根據攝影測量技術進行的三維建模技術應用到城市測圖中,應用到不動產變更測量中[5-7]。
2 房地一體化項目傳統測量技術方法
常規的房地一體化項目需要提前制作工作底圖,一般選用大比例尺(1∶500~1∶2 000)的地形圖、正射影像圖或已有地籍圖及宗地圖作為基礎圖件,地形測量利用全站儀與RTK以1∶500的比例尺進行全野外解析法測量,利用解析法完成界址測量與房產測量,再利用測量CASS軟件進行數據處理,技術路線流程如圖1所示。

圖1 傳統方法技術路線圖
3 無人機在房地一體化項目中的應用
利用無人機攝影測量技術進行房地一體化調查,可以省略工作底圖的制作,利用航拍影像生成的三維模型進行權屬調查,通過模型的線劃處理獲得宗地面積、界址點坐標以及房產面積等數據。技術路線如圖2所示。

圖2 無人機方法技術路線圖
利用無人機對測區攝影測量,可實現三維模型的建立,結合模型數據來進行權屬調查,有利于權屬調查的辨別與判斷,同時獲取的數據可以代替傳統測量,用于不動產的量算,從而實現無人機攝影測量在房地產一體化項目中的應用,促進房地一體化項目的開展。
3.1 明確相關技術質量要求
各相關技術精度要求嚴格按照下發的湘自然資辦發〔2020〕75號文件執行,數學基礎見表1,界址點和房角點測量精度指標見表2。

表1 數學基礎

表2 解析界址點和房角點測量精度指標
3.2 飛行工作
飛行前對測區進行踏勘,飛行攝影前需要做好像控點的布設,像控點的坐標可通過GPS測量獲得。選擇合適的無人機與攝影儀,選定合適的無人機起降點,提前做好航線規劃,提前通過天氣預報了解天氣情況,確定適合的時間。其中,像控點的布設應選擇不被遮擋、對天通視良好且容易明確辨認的地物點和目標點。飛行的各項參數可在試飛階段實驗完成,確定航線規劃、拍攝高度和傾斜角度等的最佳參數。飛行時注意做好安全防護措施,無人機攝影要有經驗的飛行手進行操作,按照準備工作確定的各項參數輸入控制平板,操作無人機起飛執行任務,直至任務完成。任務完成后檢查影像質量,如有漏洞及時補測,補測相機參數設置要一致。
3.2.1 無人機的選用
無人機的選用是否合理是無人機攝影測量能否實施的前提。根據精度要求、場地情況和天氣情況,續航能力要求等的不同,無人機選用的要求也會不同。本項目由于位于城郊區,房屋周邊情況比較復雜,因此需要續航能力比較強、速度快的無人機,此外還要求無人機操作簡單且運輸攜帶方便,同時要求采用RTK定位,能自動感知障礙物,定點起降,精準作業,以滿足測圖要求。
綜合考慮,本次項目采用大疆的精靈4 RTK搭載五向鏡頭,此款無人機將厘米級導航定位系統和高性能成像系統結合在一起,小巧便攜,既滿足了航測的精度又提高了效率,同時還減少了作業成本。對于建圖作業來說,精度與效率至關重要。其攜帶的RTK功能多頻多系統高精度RTK GNSS能達到定位精度:垂直1.5 cm+1 ppm(RMS);水平1 cm+1 ppm(RMS),滿足GB/T 7930—2008《1∶500、1∶1 000、1∶2 000地形圖航空攝影測量內業規范》的精度要求,可以做到免像控布設進行測量,具體關鍵指標見表3。

表3 精靈4RTK無人機關鍵指標
3.2.2 航線規劃
航線的規劃是無人機攝影測量的關鍵,合理與否決定了影像的完整度與冗余度是否符合要求。航線間距過大,會造成局部攝影不全,反之航線間距過小,雖保證了影像的完整卻造成了時間的浪費以及不必要的工作量增加,因此航空攝影測量規范對影像重疊度有明確要求,為滿足航測成圖的要求,一般規定見表4,如果地形起伏較大,應當適當提高重疊度值[8]。
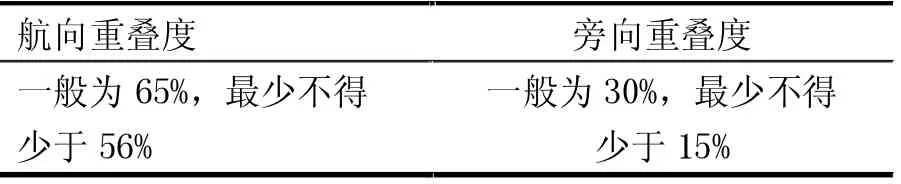
表4 重疊度一般要求
然而結合目前無人機傾斜攝影要完成的項目來看,成圖比例尺大,精度要求高,因此一般規定的重疊度滿足不了項目要求。根據三維傾斜數據的處理經驗來看,基于像控點約束,為了滿足房屋測量采集項目高精度的要求,傾斜影像應獲取地面分辨率優于2 cm的影像數據,同時其航向、旁向重疊度一般建議優于70%,以確保三維模型的效果。而當測區存在高樓時,則應適當加大重疊度,保證高層建筑的模型效果。對于地形起伏較大的區域,則應根據地形變高飛行,保證測區內大部分地物的分辨率都優于2 cm,以此來保證三維模型的效果及精度。
結合本次項目測區踏勘的情況分析,設計地面分辨率為1.7 cm,航高為100 m,航向重疊度為85%,旁向重疊度為70%,每個架次預計飛行時間約為30 min。將測區范圍線導入無人機管家軟件內,軟件自動生成滿足測區地形情況和精度要求的最佳航線。
3.3 無人機攝影測量數據處理
無人機攝影測量數據處理包括傾斜三維建模及數據處理分析。具體為:將攝影質量合格的影像導入專門的軟件中,通過導入像控點坐標、匹配坐標系、空中三角測量和空三解算等操作進行三維建模。根據建立的模型進行數據線劃處理,線劃提取過程中做到不變性、不移位、無錯漏。最后根據線劃的數據利用軟件計算分析獲得對應的界址點坐標、房產面積等不動產數據。
三維建模:采用合適的無人機攝影測量建模軟件是房地一體化調查的重要步驟。利用軟件功能生成實景模型,為調查對應的場景以及相應的數據的調查人員可以快速判斷并完成對應的房地調查。本項目采用Smart3D軟件進行傾斜攝影、空中三角測量計算與三維建模。具體空三建模流程如圖3所示。

圖3 空三建模流程
由于測區大,重疊度高,數據多、任務量較大,因此將測區分割成多塊進行內業建模以加快處理數據的速度。建模分塊的大小以及重疊度要結合測區范圍大小與軟件性能來確定,最后根據測區大小確定生成三維成果的范圍,并使用kml格式的范圍線數據對建模區域進行約束,模型成果輸出為OSGB格式。部分范圍模型效果如圖4所示。

圖4 測區三維模型效果
特征點提取:本項目利用map3D軟件進行線化提取,生成dwg地形圖,在畫圖過程中遇到分辨不出的地物要做好標識,需要開展外業測繪補充完善,線化提取部分成果如圖5所示,線化提取后還需利用CASS軟件對圖形進行修整。

圖5 線化提取成果
3.4 精度檢驗
從測區按比例抽取地物進行野外測繪其房屋界址點坐標、房屋邊線長度以及面積,經檢查符合規范精度要求。
4 結束語
無人機攝影測量技術的不斷發展加深了在相關行業領域的應用拓展,其高效率的工作方式比傳統測量方式節約了大量的人力物力,大大縮短了工期。但是由于其精度以及成本問題,在選用測量技術方法時,還要結合項目具體的特點以及綜合成本來考慮。此外在選用無人機攝影測量方法時要選擇合適的無人機以及三維建模軟件,采用合適的方法得到滿足技術要求的數據成果。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03