輪緣推進器應用于深潛救生艇的可行性分析
2022-08-31 06:21:28周智勇孫俊忠
船電技術 2022年9期
周智勇,孫俊忠,劉 文
輪緣推進器應用于深潛救生艇的可行性分析
周智勇,孫俊忠,劉 文
(海軍潛艇學院,山東青島 266000)
本文簡要介紹了無軸輪緣推進器的結構和國內外發展現狀,通過總結歸納無軸輪緣推進器優勢特點,對比深潛救生艇使用需求,探討該技術應用于深潛救生艇的可行性,并對應用前景進行分析。
輪緣推進器 深潛救生艇 可行性
0 引言
傳統推進系統主要由主機、軸系、推進器等組成,主機功率的增大會帶來主機體積的增加和軸系長度的加長,使船艙空間利用率減少[1]。在此背景下,無軸輪緣推進器應運而生。它將電機轉子與槳葉集成為一體,取消了傳統的穿艙推進軸系和密封系統,采用電能直接傳遞功率,幾乎不占用船艙空間,特點適合于深潛救生艇。
1 無軸輪緣推進器
無軸輪緣推進器(RDT)是基于集成電機推進器的技術而發展的。由于無軸輪緣推進器相對于傳統推進器的優勢非常明顯,近幾年來各國對此進行了大力的開發和研究,已有多個國家研發出不同功率和型式的無軸輪緣推進器樣機,并且在船舶上已有應用。
早在20 世紀90 年代,美國通用動力電船公司就提出輪緣推進器新概念,設計時仍保留傳統推進軸系,故又稱作梢部驅動推進器[1]。進入21 世紀后,輪緣推進技術取得了較大發展,取消了傳統推進軸系,具有占用空間小、結構布置簡單、噪聲小等特點。
1.1 結構組成

圖1 無軸輪緣推進器結構
無軸輪緣推進器主要由槳葉、電機轉子、多磁極定子、水潤滑軸承、導罩外殼等組成,從結構上可將其劃分為有槳轂型和無槳轂型[2],外形可參考圖1。
有槳轂無軸輪緣推進器的結構是在無槳轂無軸輪緣推進器的結構基礎上,為加強結構強度,在槳葉旋轉中心再多加1個通過導葉與定子相連的槳轂,其結構對比如圖2所示。
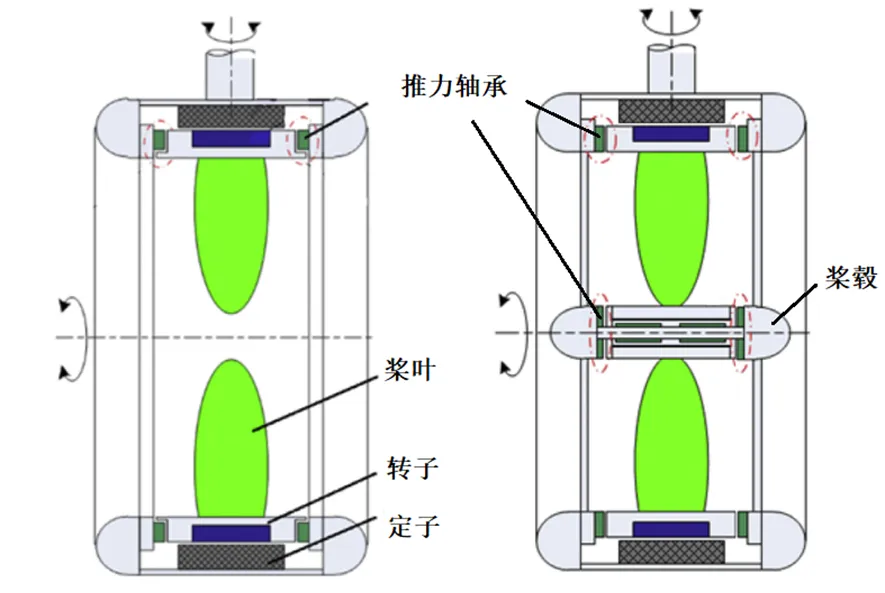
圖2 無槳轂型與有槳轂型無軸輪緣推進器對比圖
1.2 國外研究應用現狀
無軸輪緣推進器最早是由美國海軍水下作戰中心提出來的,并被認為是潛艇發展的重要技術突破點。由于具有噪聲低和振動小等優勢,無軸輪緣推進器非常適合應用于魚雷和核潛艇等隱蔽性要求高的軍事領域。通用動力電船公司在上世紀90年代設計了一組梢部驅動吊艙推進器,并進行了試驗研究,研究表明梢部吊艙推進器的敞水效率要比槳轂驅動的吊艙推進器高5%~10%左右;之后該公司在2002年和賓夕法尼亞州立大學應用研究試驗室合作,設計了以巴拿馬船為使用對象的輪緣驅動推進器;隨后又把美國海軍退役的小水線面雙體船SES-200(船長48.8米、寬13.l米、吃水5.6米、滿載排水量340噸) 作為應用對象,設計了一型輪緣推進器用于輔助推進[1];2003年美國海軍研究辦公室與太平洋船舶供應公司和緬因州大學合作,開發了2100馬力的無軸輪緣推進器;2012年Rolls-Royce公司開發的永磁RDT(TT-PM1600)交付挪威奧林匹克航運公司使用;2014年,Voith公司的兩臺VIT 2000-1000型RDT被應用為船艏側推使用;2015年,由Rolls-Royce公司設計制造的RDT交付安裝在挪威科技大學的研究船上(單機額定功率達到500 kW)[3]。此外,國際上的其它船用推進器供應商(如Brunvoll、Schottel等),也都先后開發了無軸輪緣推進器系列產品。
1.3 國內研究與發展現狀
國內對無軸輪緣推進器的技術研究起步較晚,與國外相比差距較大。在“八五”期間,我國已開始研制20 kW集成推進器原理樣機;2006年,863海洋領域開展了“AUV、ROV集成推進器”課題研究;中國船舶七〇二所和哈爾濱工程大學等在水動力性能分析方面對無軸輪緣推進器進行了研究;海軍工程大學馬偉明院士團隊、七〇四所和七一二所在無軸輪緣推進器樣機研制方面已開展深入研究,取得了一定研究成果;浙江三力士智能裝備制造有限公司研制的小功率樣機已成功應用在潛水器上[2]。
2 深潛救生艇推進裝置
LR7推進裝置由兩個主推進器和四個輔助推進器組成。主推進器安裝在艉部左右兩舷,可轉向。四個輔助推進器有兩個裝在舯部左右兩舷,一個裝在艏部,一個裝在艉部。主推進器為電動推進器,能夠以“差動推進”模式駕駛或者操作,提供向前和向后的動力。輔助推進器由液壓驅動,舯部兩個輔助推進器可以旋轉90°以提供垂向控制。艏部和艉部的輔助推進器可以同時運行,也可以分別運行,以分別控制橫向運動和旋轉運動。如圖3所示。

圖3 LR7推進器布置圖
主推進器由兩個無刷直流電機組成,每個電機經變速箱驅動一個螺旋槳。推進器安裝于LR7艇尾部外面,分別位于左右舷兩側。每個推進器安裝于一個轉向機構上,該機構允許推進器直接連接到左舷或右舷,以實現轉向的變化。
主推進器由23 kW無刷直流電機和一個軸承組件組成。在前進方向上,主推可提供約3.85 kN的推力。電機轉速為3 000 rpm。采用Brevini公司的齒輪箱,將其安裝在電機和螺旋槳軸之間,以降低螺旋槳的轉速至額定轉速500 rpm。雖然齒輪箱和軸承共用一個補償器,電機、齒輪箱和螺旋槳軸的軸承之間都彼此各有密封。主推安裝在樞軸上,以便可以轉向。
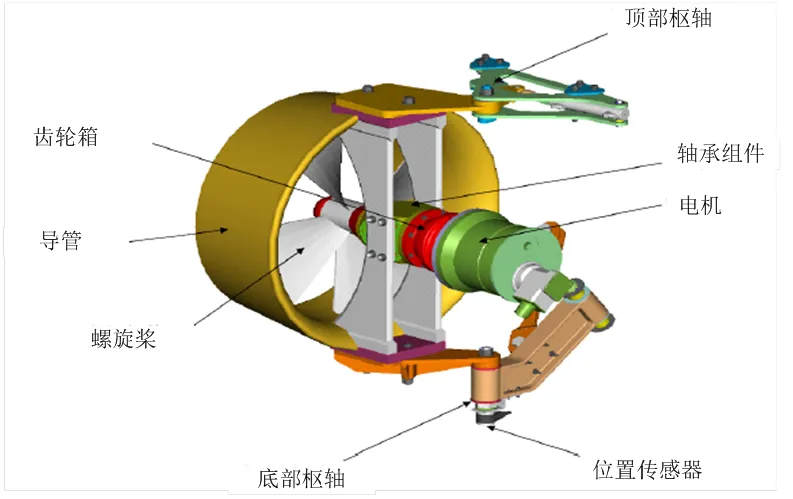
圖4 LR7主推進器結構
日本川崎公司建造的載人深潛救生艇(DSBV)艇長12.4米,艇寬3.2米,艇重40噸,裝有一臺22 kW電機作為推進動力裝置,航速4節,可載12人。推進裝置結構與LR7類似。
3 深潛救生艇推進裝置應用無軸輪緣推進器的可行性分析
3.1 推進效率更高
現階段成熟的無軸輪緣推進器產品的功率一般為100 kW以下,在艦船領域一般作為應急推進或側推裝置。LR7推進電機為23 kW,日本川崎深潛救生艇為22 kW,采用無軸輪緣推進器完全可以滿足要求。采用無軸輪緣推進器的船型可以使船舶艉部結構線性得到進一步優化,提高船體流體性能和水動力特性。根據仿真測算,采用無軸輪緣推進器的船型航行阻力比采用傳統推進系統的可減小5%~10%。無軸輪緣推進器還直接使用海水散熱,節約了冷卻系統的能源消耗,提高了全船的能源利用效率,可使深潛救生艇在水下工作更長時間,提高救援效率。
3.2 占用船艙空間少
LR7由3個彼此連接的球形耐壓結構組成。前部的球形艙是操縱室,可容納2名駕駛操縱人員,中部為救生艙,下面連著半球形耐壓設閘室。后部為機械和動力艙。如果采用無軸輪緣推進器,則可以省下傳動軸、齒輪箱和軸承組件,節約大量的后部空間。無軸輪緣推進器由于使用水潤滑的復合材料軸承,且完全浸沒于海水中,因此推進系統不再需要軸密封件、獨立冷卻系統和充油式的齒輪箱殼體等。占用船艙空間少可使深潛救生艇在救生作業時,搭載更多人員。
3.3 布置靈活
LR7裝有4個輔助液壓推進器,其中兩個橫向推進器,一個裝在艏部,一個裝在艉部。兩個側向推進器,分別裝在左右舷。
輔助推進器由液壓系統驅動。推進器推力與螺旋槳轉速成正比,而螺旋槳轉速又與螺旋槳軸驅動力矩成正比,螺旋槳軸驅動力矩取決于液壓馬達的供油壓力和排量,所以可以通過控制馬達的供油壓力和排量這兩個因素來控制螺旋槳的轉速和推力。
深潛救生艇由于特殊的用途,必須安裝有橫向推進器和側向推進器。LR7采用液壓推進模式,與電力推進相比,需要安裝液壓泵、液壓油箱、蓄能器和液壓馬達等,遠不如電力推進方便。但如果采用常規電力推進,就需要在艇的艏部、艉部、舯部兩舷安裝四個方向的傳動軸,布置極為不便。采用無軸輪緣推進器,由于沒有機械傳動軸,只有“電”的聯系,安裝布置將會非常方便,且由于無軸輪緣推進器可以360°的旋轉,可使船舶轉彎半徑減小,操縱靈活。
4 結論
無軸輪緣推進器由于結構特殊,現階段應用于艦船主推進系統為時尚早。由于功率能滿足深潛救生艇需要,可節約一定的艙內空間(這對于容積非常有限的深潛救生艇難能可貴),有效提高輔助推進器布置效率,在深潛救生艇上應用具有很大的優勢。為盡早在深潛救生艇上應用,還需要解決一些關鍵性技術問題,包括大功率電機-螺旋槳一體化設計原理和方法的研究、無軸輪緣推進智能控制策略的研究、無軸輪緣推進系統-船體的動力學耦合關系的研究和無軸推進裝置振動和噪聲控制方法的研究等[4]。
[1] 邱鵬, 鄭高. 輪緣驅動推進器的研究與應用現狀[J].廣東造船, 2019(2): 28-30.
[2] 胡舉喜, 吳均云, 陳文聘. 無軸輪緣推進器綜述[J].數學海洋與水下攻防, 2020, 3(3): 185-191.
[3] Yan X, Liang X, Ouyang W, et al. A review of progress and applications of ship shaft-less rim-driven thrusters[J]. Ocean Engineering, 2017, 144: 142-156.
[4] 談微中, 嚴新平, 劉正林等. 無軸輪緣推進器研究現狀與展望[J]. 武漢理工大學學報, 2015, 39(3): 601-605.
Feasibility analysis of rim-driven thruster applied to deep submersible lifeboat
Zhou Zhiyong, Sun Junzhong, Liu Wen
(Navy Submarine Academy, Qingdao 266000, Shandong, China)
U664
A
1003-4862(2022)09-0043-03
2022-04-14
周智勇(1972-),男,教授,研究方向:艦船電力系統。E-mail:qd_zzy168@163.com
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
哲學評論(2021年2期)2021-08-22 01:53:34
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
汽車工程學報(2017年2期)2017-07-05 08:13:02
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
