應用于下肢功能障礙者的康復機器人:綜述
2022-08-31 03:46:52周金滿
制造業自動化 2022年7期
關鍵詞:康復
薛 強,周金滿,楊 碩
(1.天津市輕工與食品工程機械裝備集成設計與在線監控重點實驗室,天津 300222;2.天津科技大學 機械工程學院,天津 00222)
0 引言
下肢功能障礙者由于神經通路受阻,無法自主完成日常生活基本活動,醫學知識表明,重復運動可重新激活患者的神經通路[1]。LLRR將人工智能和機械動力裝置結合[2],為患者提供重復、多樣的下肢運動,激活神經通路,增強肌肉活力,提高患者自理能力和日常生活參與度[3]。
患者使用傳統的康復訓練方法需要多個護理人員的幫助,LLRR的使用可以減少護理人員的投入數量,也減輕患者的體力及心理負擔。目前的LLRR研究與設計主要集中在理論上,未對樣機進行臨床實驗和專業的醫療評估,受試者的樣本量尚且不足;LLRR設備的人機融合性還有待提高;在使用效果方面,LLRR的不利影響尚不明確,例如是否會對肢體造成二次傷害、產生并發癥等;不同患者的步態有著不對稱性及多變性,LLRR的個性化研究也有諸多困難。
本文綜述了先進、有實用性的LLRR,按照其主要功能,分為關節康復、步態康復機器人和日常活動輔助機器人。總結了各類機器人及其應用技術的優缺點,為后續LLRR的研究提供參考方向,也可以幫助下肢殘障患者挑選LLRR。
1 材料與方法
目標:總結經學者研究并驗證有效、可實際應用的LLRR及應用技術的現狀和優缺點,為后續LLRR研究提供參考方向,幫助下肢障礙者了解并選擇LLRR。
檢索了LLRR相關的文章,檢索時間為2020年5月至7月,在以下數據庫進行:IEEE xplore,Science Direct databases,Web of Science,PubMed,ASME,SAGE journals,Mendeley,IOS PRESS,The Royal Society,CINAHL。所使用關鍵詞為:“康復輔助設備(Rehabilitation assistive devices)”或“下肢康復(Lowerlimb Rehabilitation)”或“髖關節、膝關節、踝關節外骨(Hip joint,Knee joint and ankle joint Exoskeleton)或下肢康復機器人(Lower-limb Rehabilitation Robot)”。
納入標準為:直到2020年出版的,與LLRR相關的英文文章。
排除標準為:與搜索主題不相關的、重復的文章,有關盲人行走的文章、以及非英文文章。在此基礎上,最初檢索到309篇文章,在閱讀摘要和應用納入、排除標準后,去掉了與兒童康復相關的文章,最終評估62篇文章。
2 結果和討論
2.1 關節康復機器人
髖膝踝關節構成人體下肢運動鏈,在人體日常活動中有重要作用。髖膝踝關節的一個或多個產生疾病或受傷,都會影響下肢功能,影響生活質量。
髖關節在人體進行步行、下蹲、爬樓梯、坐立轉換等動作時皆有著不同的狀態和作用[4,5],髖關節受損會使下肢運動范圍受限[6],影響正常生活。髖關節康復機器人可以幫助患者改善肌肉力量,提高軀干穩定性[7]。Zhang等[8]開發的髖外骨骼NREL-Exo,可幫助肌肉無力的患者主動行走,保持身體平衡。Ryder等[9]開發的髖外骨骼,當患者的步態軌跡與參考軌跡不同步時,外骨骼會自動迅速調整位置適應患者的狀態,可幫助肌肉無力、腿部受傷等患者恢復自然步態,避免了患者疲勞時被動跟隨外骨骼運動,減少了對肢體產生二次傷害的可能。
膝關節在人體的下肢運動過程中有支撐體重、輔助下肢擺動和吸收沖擊的重要作用[10],是最容易受傷的下肢關節[11]。膝外骨骼可以幫助患者行走[12,13]、進行坐立轉換[14]。Kashif等[15]設計的膝外骨骼,如圖1所示,可根據肌電信號識別患者意圖,控制步行軌跡。如圖2[16]及圖3[17]所示的多中心結構膝外骨骼,可為患者提供真實真實自然的下肢運動,減少人機之間的不對準。Zhang等[18]提出一種柔性膝外骨骼,如圖4所示,采用IMUs測量膝關節角度信息,為患者膝關節助力,降低步行代謝成本。

圖1 EICoSI 外骨骼的主要結構[15]

圖2 膝外骨骼模型[16]

圖3 膝外骨骼的運動范圍[17]

圖4 可穿戴軟膝外骨骼[18]
踝關節支撐著人體的站立、行走、坐立轉換等活動,為下肢活動提供了大部分能量[19,20]。踝關節受損會導致患者步態異常、坐立轉換出現障礙、身體失衡。踝外骨骼可以輔助患者進行踝關節康復訓練,維持人體平衡,完成日常生活活動[21,22]。McCain等[23]設計的踝外骨骼可以完成不同速度的步行任務,改善患者身體的受力情況,保護患者的身體。Liu等[24]使用四連桿離合器開發了能量存儲和釋放系統,可以在人體的站立階段儲存能量,在其他階段釋放能量,這項技術可以與適當的彈簧機制[25]結合,提高機器人的效率。
3.2 步態康復機器人
步態康復機器人可以輔助患者以正常的步態行走[26],或輔助患者進行骨盆運動、平衡訓練[27,28],適用于步態軌跡或關節軌跡異常、下肢力量弱的患者。Chen等[29]提出的“需要時協助”(Assist-When-Needed,AWN)控制策略,可僅在患者需要時提供輔助,有靈活的自適應性。Pan等[30]開發的LLRE如圖5所示,利用基于伺服驅動器的多回路調制方法輔助患者的步態趨于正常。Wu等[31]設計的LLRR如圖6所示,該設備的髖膝踝關節可調,適用于不同高度的患者。

圖5 LLRE系統 [30]
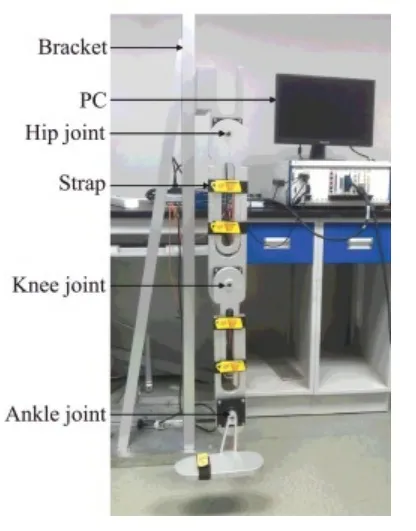
圖6 硬件配置[31]
另有一些具有優勢的結構及設備,如氣動人工肌肉(PAM)可提高設備的舒適性、安全性[32],減輕設備重量、體積、成本,減輕患者身體負擔[33,34]。坐/臥式康復機器人可以減輕患者的臀和腿部的體重負擔,增加下肢關節的活動范圍[35],如圖7所示的坐臥康復機器人[36],可以實現參考軌跡自適應柔順控制,為患者提供有效的康復訓練。纜繩/纜索驅動康復機器人可用以進行步態康復訓練[37]、人體運動范圍的強化和平衡、本體感覺訓練[38]。如圖8所示的纜繩驅動并聯機器人[39],可以完成人體下肢的康復訓練任務。

圖7 康復外骨骼的機械結構[36]
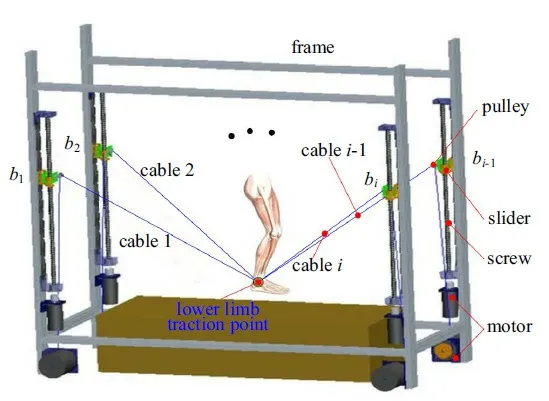
圖8 纜索驅動康復機器人[39]
3.3 日常活動輔助機器人
日常活動輔助機器人適用于中風、腦外傷、脊髓損傷患者,肌肉和關節力量不足的老年人,可以輔助患者實現爬樓梯、下蹲、坐到站及行走運動,降低體力消耗[40~42]。
Dong等[43]提出了人類通用出行協助(HUMA)外骨骼,如圖9所示,可為患者提供多種行走速度。Li等[44]設計了一種不對稱外骨骼,如圖10所示,由外骨骼機械腿和可單獨使用的智能假肢組成,大腿和小腿長度可以調整,可適應不同的人群。該設計實現了功能模塊化,可應用于個性化設置。然而,由于不同患者肢體的不對稱性及習慣差異性,相關的理論和技術需要進一步的研究改進。

圖9 HUMA及其主要組件 [43]

圖10 外骨骼的結構[44]
對于生物體和機器人來說,對環境擾動和變化的感知及響應能力必不可少[45]。已經有學者證明了一些障礙物探測器的實用性[46,47],可代替患者做一些保障身體安全的行動決策。但學者要注意提高探測技術的準確性,以免錯誤的決策傷害到患者。一些算法或控制方法也可以提高LLRR的人機協調能力:高斯過程學習算法[48]、基于地面反作用力和力矩(GRF/M)的控制方法[49]可以提高力矩預測準確性;自抗擾控制可以改進抗干擾性,提高跟蹤性能[50];非線性模型預測控制器[51]可以提高系統穩定性,慣性測量單元[52](IMU)及廣義比例積分[53](GPI)控制策略可以檢測用戶運動意圖,實現自適應調整。
3.4 討論
不管是步態異常的人還是健康人,在實驗室和日常生活中的狀態是不完全一樣的[54]。學者大多在實驗室環境下而非生活狀態下測試志愿者數據,樣本量不足,或許會與患者的期望有偏差。患者在長時間的康復訓練過程中要克服機械阻抗,健側及患側可能會因此受傷,所以LLRR的柔性也需要進一步提高。
研究表明,長時間使用降低肌肉活動度和能量消耗的LLRR,不利于提升肌肉強度[55],所以患者仍然需進行力量訓練,增強對肢體的控制能力和協調能力。此外,由患者意圖驅動LLRR運動可以激發患者的參與并加快康復過程[56],可利用腦電信號識別技術,如HAL外骨骼[57]、ATL框架[58]等,進行意圖識別,或利用肌電信號[59]識別下肢狀態,自適應地實時規劃機器人的軌跡。結合功能性電刺激(FES)[60],或針灸治療[61],可增肌肉收縮力和耐力,矯正患者下肢姿態以及肌肉形態[62]。
由于LLRR技術先進,多數患者無法承受其成本;多數LLRR自重較重,障礙識別、輔助治療等功能模塊的應用會使LLRR的重量增加,雖然可以通過提供扭矩、改變功率等方式來平衡設備的自重或者克服結構阻力,但這也影響著LLRR的工作效率。
4 結語
綜合近年來的研究成果,應用于下肢障礙者的下肢康復機器人可從以下幾方面進行改進和發展:
1)實驗數據來源。LLRR設計過程中使用的步態數據盡量靠近患者的日常生活狀態,或在患者的生活狀態下采集步態數據,并加大樣本數量,使設計具有代表性。
2)改善LLRR的柔性、輕量化設計。可從材料、結構方面進行改進設計,進行輕量化研究,利用轉矩控制降低機械阻抗,實現柔順的人機交互,減少對患者肢體造成二次傷害的可能,并進一步研究以降低轉矩脈動和噪音。
3)LLRR的普及。保證訓練效果的基礎上改善外觀設計,應用適當的人機交互界面幫助患者使用LLRR,普及相應的知識,進行專業培訓,使更多患者獲得康復幫助。
4)意圖識別及個性化設置。進行模塊化設計,添加肌電、腦電信號識別及障礙識別等功能,識別患者運動意圖和肢體狀態,以及康復訓練環境,根據反饋信息調整設備工作模式,增強適應性,實現個性化設置。
5)多種治療方法結合。FES或針灸治療和康復訓練結合,提高康復訓練的效果,可用FES模擬針灸治療過程,或根據人體穴位位置在LLRR相應位置設置針灸模塊。
6)降低成本。低成本的LLRR會被更多的患者接受,可以擴大普及,為更多的患者提供幫助。
猜你喜歡
康復(2023年11期)2023-11-20 07:45:54
康復(2023年14期)2023-11-20 06:04:54
中老年保健(2021年4期)2021-08-22 07:08:14
護理與康復(2021年2期)2021-03-05 08:10:44
家庭醫學(下半月)(2020年1期)2020-05-11 02:05:46
廣東醫科大學學報(2020年6期)2020-02-06 06:00:56
特別健康(2018年2期)2018-06-29 06:13:44
反射療法與康復醫學(2017年7期)2017-01-16 01:11:02
中國衛生(2014年6期)2014-11-10 02:30:50
中國中醫藥現代遠程教育(2014年23期)2014-03-01 04:33:45
