無刷直流電機調速系統的設計與實現
2022-08-31 00:54:38韓佳芳李雅迪馬琳琳魏強
電腦知識與技術 2022年19期
韓佳芳 李雅迪 馬琳琳 魏強
摘要:該文首先論述了無刷直流電機的基本構造與工作原理,以及電機調速的方法,分析研究利用單片機控制無刷直流電機調速的總體方案。采用AT89C51單片機作為整個控制電路的核心部分,L293D作為驅動芯片,硬件部分設計包括單片機最小部分,鍵盤電路,速度檢測電路,正反轉控制電路,過流保護電路等。選用KEIL作為單片機編程環境,設計無刷直流電機調速系統軟件程序整體流程框圖。在設計中,采用PWM調速方式,通過改變PWM的占空比從而改變電動機的電樞電壓,進而實現對電動機的調速。設計的整個控制系統,在硬件結構上采用了大量的集成電路模塊,大大地簡化了硬件電路,提高了系統的穩定性和可靠性,使整個系統的性能得到提高。最后,無刷直流電機調速系統的仿真與調試,焊接的實物能夠達到設計的要求,實現了電機啟動、停止、正反轉、加速、減速等功能。
關鍵詞:無刷直流電動機;AT89C51單片機;調速控制;霍爾位置傳感器
中圖分類號:TP302.1? ? ?文獻標識碼:A
文章編號:1009-3044(2022)19-0108-03
1 引言
在傳統的電機控制中,直流電機一直占據著很重要的地位,由于直流電機本身帶有機械換向器和電刷,而產生了一系列的問題,比如電機容量有限、噪音大和可靠性低等,因此,人們開始嘗試探索一種新型的低噪聲、高效率和大容量的電機驅動電機。
隨著科學技術的發展,電力電子技術和自動控制技術得到了很好的發展,人們開始將這些新興技術運用到電機的研究當中,無刷直流電機也由此誕生了,無刷直流電機和傳統的電機相比具有很多的優點,比如說體積小、效率高、容量大、可靠性高等[1]。
經過這些年的發展,直流電機的內部結構和控制方式與之前的電機相比較,發生了很大的變化[2]。尤其是計算機技術在控制領域的出現,新的電子功率器件的技術日趨成熟,通過全功率開關脈寬調制(脈寬調制)控制方法成為一種新的電機調速方法[3]。
2 無刷直流電機控制設計
2.1 系統總體設計方案
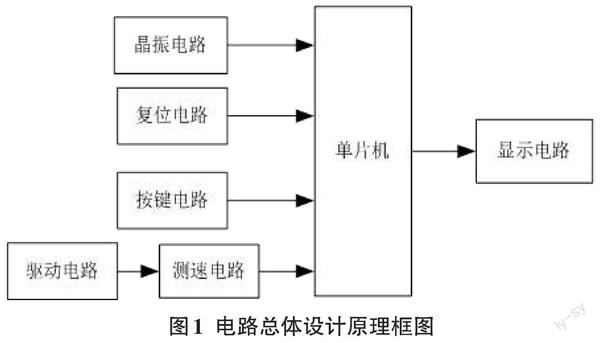
控制電路以單片機作為主控芯片,L293D作為驅動芯片,來驅動H橋電路。用PWM脈沖調制控制電機轉速[4]。與單片微型計算機相比,新型單片機增加了許多新功能,包括脈寬調制功能[5]。對程序初始化設置,可以自動產生脈沖波形信號。改變占空比的大小,可以實現電機以不同的速度轉動。總體設計方案原理圖如圖1所示:
2.1.1 控制電路基本原理
本文是基于單片機的無刷直流電機調速系統的設計,包括以下幾個部分:AT89C51單片機,四位數碼管,L239D驅動芯片,H橋電路,霍爾測速,鍵盤電路和直流無刷電機。
用AT89C51單片機作為主控制器,數碼管用于顯示轉子的旋轉方向和速度的大小,使用L239D作為驅動芯片驅動H橋電路,選擇輸入鍵盤用來實現對電路的控制。采用脈寬調制技術控制電機的速度。
2.1.2 脈寬調制技術(PWM)
在設計中,采用PWM調壓調速方式,通過改變PWM的占空比從而改變電動機的電樞電壓,進而實現對電動機的控制[6]。
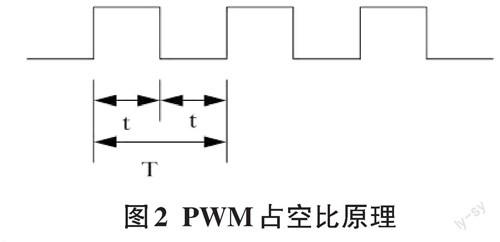
PWM控制的原理是在驅動電路中,通過改變開關在一個通斷周期內接通的時間,也就是改變一個周期內高電平的持續時間,占空比的大小會影響輸入的電樞電壓,也會改變電機的轉速[7],原理如圖2所示。
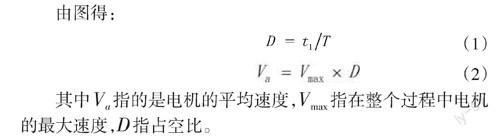
由圖得:
其中[Va]指的是電機的平均速度,[Vmax]指在整個過程中電機的最大速度,[D]指占空比。
當占空比發生改變時,輸入電壓就發生改變,從而電機速度也發生改變,即達到了調速的目的。無刷直流電機速度控制是運用PWM控制技術,對單片機AT89C51進行編程,能得到PWM輸出波形,占空比的大小也可任意改變,只需在編程時處理占空比的大小即可。
3 系統硬件電路設計
硬件電路的設計是將每個功能子模塊分開設計,再將這些子模塊組合在一起,形成整個硬件電路的設計。硬件部分主要包括:單片機選型及外圍電路、鍵盤電路,測速電路、正反轉電路、過流保護電路等。
3.1 單片機選型及外圍電路設計
3.1.1單片機最小系統
單片機最小系統是一個完整的計算機系統,可以使單片機正常工作,并能正常發揮其功能[8]。本設計采用AT89C51單片機,最小系統包括:AT89C51單片機、時鐘電路、復位電路等。如圖4藍色虛線框內所示:
3.1.2時鐘電路
單片機的時鐘連接方式可以分為內部時鐘方式和外部時鐘方式。在本設計中用的是內部時鐘方式,如圖4黃色虛線框所示。在內部時鐘方式中,XTAL1和XTAL2引腳兩端必須連接在石英晶體振蕩器和微調電容上,單片機、晶振以及電阻構成振蕩電路,C1和C2一般取30pF,晶振的頻率取值在范圍1.2MHz~12MHz之間,在本次設計中采用的10.1M 的石英晶振。
3.1.3復位電路
復位電路設計如圖4紫色虛線框內所示。RST(第九引腳)為復位引腳,當有2個機器周期以上高電平時,控制器將執行復位操作。如果RST持續高水平,單片機是在一個周期的復位狀態。
3.2復位電路
在鍵盤設計模塊中,把正反轉、急停、加速、減速四個開關分別與單片機的P1.0、P1.1、P1.2、P1.3端口相連,然后把它們的公共端再與地相連。其電路如圖4紅色虛線框內所示。其中K1:電機啟動按鍵,K2:加速按鍵,K3:減速按鍵,K4:正反轉按鍵。
3.3無刷直流電機測速電路的設計
使用霍爾傳感器產生脈沖信號時,結構一部分將小磁鋼粘在圓盤上,再將圓盤與電機同軸相連;另一部分是霍爾傳感器,與電機定位好后,固定在電路板上。當電機轉動時,點帶動圓盤轉動,轉動過程中不斷地產生脈沖信號[9]。若要獲得多個脈沖信號,可以在圓盤上多粘幾個小磁鋼,并將脈沖送單片機中進計數,即可獲得轉速信息。
3.4電機控制正反轉電路的設計
通過改變直流電壓,發動機速度發生變化,本設計采用脈沖寬度調制(PWM)來實現速度控制。這里采用H橋電路來控速,如圖3所示,H橋驅動電路是典型的直流電機控制電路。橋電機驅動電路由四個晶體管和一個電機組成。要想使電機轉動,必須讓對角線上的一對晶體管導通,電流由左至右或從右至左流過電機,從而實現電機不同方向的轉動[10]。
3.5顯示電路的設計
數碼管是一種可以發光的半導體元件,給不同引腳輸入電流會使相應引腳發光,在數碼管上顯示不同的數字[11]。本設計選擇采用七位四段數碼管來顯示速度的變化,如圖4所示。
3.6 系統總體硬件電路
綜上所示,系統整體設計的硬件電路圖如圖4所示:
4 軟件部分的設計
軟件設計主要包括對每一個模塊進行編程,使它能夠實現對硬件的控制。在軟件設計上,要首先考慮,我們需要實現什么樣的功能,達到什么樣的目的,比如在本設計中,我們需要產生PWM波,那就要想到需要什么樣的軟件,來產生該信號。所以在軟件設計時,應定義一些標志位,比如啟動標志位以及閃爍標志位的定義等。功能程序如表1所示:
軟件設計的主程序流程圖如圖5所示:
5 仿真與調試
5.1系統仿真
仿真是在PROTEUS軟件環境下結果如圖6所示。在PROTEUS軟件搭建好仿真電路,將程序寫入單片機,運行,按下啟動按鍵,電機轉動;按下加速按鍵,電機轉速加快,直到達到最高速度;按下減速按鍵,電機轉速逐漸減慢,直到停止;按下正反轉按鍵,電機可以沿著相反的方向加速或減速。電機運行結果如圖11中(a)、(b)、(c)、(d)所示:
5.2系統調試
經過不斷地修改和完善,設計最后基本達到了要求,當接通電源,按下啟動按鈕,電機可以正常運行,按下加速和減速按鍵,電機相應地做加速和減速變化,按下正反轉按鍵,電機可以正轉和反轉。實物如圖7所示:
6 總結
本文是基于單片機的無刷直流電機調速系統的設計與實現,主要完成了以下工作:
(1)介紹了無刷直流電機的結構組成、工作原理、電機調速的方法,經過分析最后采用PWM調壓方式進行速度調節。
(2)根據任務要求,設計出系統的總體原路圖,介紹系統控制原理。
(3)對電路硬件部分進行了設計。硬件部分包括控制單元、驅動單元、速度檢測和顯示電路,正反轉控制電路,過流保護電路等。
(4)對電路軟件部分進行了設計。首先設計出系統整體程序流程圖。然后將系統分成若干個模塊,分模塊進行程序設計。
(5)進行了仿真調試,驗證本設計能實現直流電機調速、加速、減速以及電機正反轉。
雖然本文完成了系統的設計,但仍然有很大的改善空間。比如電機調速的精度,無刷直流電機運行速度較低等。相信隨著無刷直流電機控制技術的發展和完善,還有很多應用潛力會被陸續開發出來,應用也會越來越廣泛。
參考文獻:
[1] 梁偉.單相無刷直流電機及其無位置傳感器控制系統研究[D].杭州:浙江大學,2014.
[2] 王家達.基于DSP的無速度和位置傳感器無刷直流電機控制系統的研究和設計[D].上海:復旦大學,2007.
[3] 陳風凱.無刷直流電機控制系統的研究與設計[D].廣州:廣東工業大學,2014.
[4] 王嚴.基于單片機的無刷直流電機控制系統設計與實現[D].南京:南京郵電大學,2013.
[5] 李偉,朱翔,奚海鑫,等.基于單片機的無刷電機控制系統設計[J].儀表技術與傳感器,2011(11):74-76,79.
[6] 吳寶啟,張元偉,劉陽.基于單片機的無刷直流電機控制方案設計[J].煤礦現代化,2009(6):74.
[7] 宮曉輝.關于直流無刷電機的發展狀況和應用及其研究方向分析[J].世界華商經濟年鑒·城鄉建設,2012,19(6):167.
[8] 顧劍.無刷直流電機單片機控制調速系統設計[J].電子世界,2014(9):134-135.
[9] 盧靜,陳非凡,張高飛,等.基于單片機的無刷直流電動機控制系統設計[J].北京機械工業學院學報,2002,17(4):44-49.
[10] 何晉良,歐陽昌華,廖力清.基于DSP的無刷直流電機控制系統的研究與設計[J].電子元器件應用,2010,12(9):3-6.
[11] Qiu C,Huang S,Lin Z,et al.A PWM rectifier control strategy for four-quadrant cascade converters based on complex vector pi regulators[J].Zhongguo Dianji Gongcheng Xuebao/Proceedings of the Chinese Society of Electrical Engineering,2015,35(11):2804-2812.
收稿日期:2022-03-03
基金項目:萬物互聯視域下物聯網智慧農業系統助力鄉村振興戰略脫貧攻堅應用研究(22B520032)
作者簡介:韓佳芳(1991—),女,河南鄭州人,助教,碩士,主要研究方向為物聯網應用技術、人工智能;李雅迪(1991—),女,河南鄭州人,助教,碩士,主要研究方向為物聯網應用技術、人工智能;馬琳琳(1992—),女,河南南陽人,中級講師,碩士,主要研究方向為計算機應用技術;魏強(1990—),男,河南鄭州人,主要研究方向為無線通信。