基于PLC的垂直貨梯設計
2022-09-01 02:29:28劉俊朱東東郭琳
微型電腦應用 2022年8期
劉俊, 朱東東, 郭琳
(商洛學院, 電子信息與電氣工程學院,陜西,商洛 726000)
0 引言
垂直貨梯主要是為了將貨物從低處垂直運輸到高處而設計的特種裝置,廣泛用于商場、倉庫、新建高樓等場所[1]。隨著電商時代對貨物存儲量、流通量、庫房空間的要求不斷提高,垂直貨梯逐漸成為中大型倉庫提升工作效率的必備選擇,其穩定可靠、安全便捷的特性成為生產和使用雙方的重點關注要素。PLC因其編程簡單、可靠性高、功能易擴展、抗干擾能力強等特點受到了眾多電氣工程師和相關設備使用者的認可,已廣泛應用于電梯[2-3]、數控機床[4]、提升機[5]等系統中。本文為了提升垂直貨梯運行的安全性、穩定性和操作便利性,設計一種以PLC為控制核心,實體操控元件和監控組態并存的垂直貨梯,不僅能夠實現系統運行狀態的可視化操作,還可以提升其使用效率。
1 系統結構及控制要求
基于PLC的垂直貨梯是通過電動機正反轉卷繞鋼絲繩,帶動吊箱沿垂直方向在導軌之間上下運動而實現。為了方便吊箱控制,該貨梯在吊箱中安裝有樓層指令請求按鈕,在貨梯附近的某個穩固位置安裝有操控臺。當吊箱中有人時,可以由吊箱人員控制吊箱運行目的樓層,此時相當于電梯功能;當吊箱只載貨物時,吊箱的運行高度或樓層由箱外操控臺的負責人員控制。該系統主要包括:①機械結構部分,包括井道部分的導軌、載物平臺的導向滾輪、鋼結構底座等;②驅動部分,包括電動機、制動器等;③電氣部分,包括電機控制、信號、安全和照明等裝置;④輔助部分,包括門系部分、安全裝置等。垂直貨梯3層結構如圖1所示。

圖1 垂直貨梯三層結構
垂直貨梯控制系統主要滿足以下控制要求:
(1)吊箱運行狀態可以通過吊箱內部樓層請求按鈕和吊箱外操控臺進行管理。(2)按下樓層請求命令,吊箱能快速響應,并能運行到指定樓層停止。(3)在吊箱上升或下降的過程中,若按下急停按鈕,吊箱應立即停止,復位急停按鈕后,需要重新選定樓層,吊箱方可再次運行。(4)有必要的樓層顯示、信號指示燈功能。(5)可制作人機界面,通過觸摸屏完成控制。
為了驗證本文所設計的垂直貨梯電氣控制部分的可行性,特制作了簡易5層垂直貨梯實體裝置模型。在該模型中,電氣控制部分做了一定簡化:① 層門為手動式,未與控制器實現電氣連接;② 吊箱電動機采用低速直流電機,在運行過程中為恒速,未考慮變速控制。以下章節以5層垂直貨梯實體模型的電氣控制部分為研究對象進行相關軟硬件等內容的詳述。
2 控制系統硬件設計
2.1 PLC的I/O地址分配
PLC的I/O地址分配是軟件編寫和調試的前提,也是硬件電路設計的主要依據[6]。根據功能要求,制作基于PLC的5層垂直貨梯。樓層顯示采用BCD七段碼數碼管實現,該數碼管包括2根電源線和4根數據線。由于本設計最高樓層為5層,需要數碼管顯示數字1~5,即數據輸入端的二進制狀態為0001、0010、0011、0100、0101,故當第4個數據引腳接低電位時,則只需PLC的3個輸出點分別控制第1、2、3數據引腳即可實現數字1~5的顯示。在操控臺和吊箱內部操作盒上安裝有樓層請求按鈕,相同樓層請求的按鈕接同一個PLC輸入點。在各樓層均有1個限位開關,根據實際應用,限位開關的位置可調。在緊急制動或吊箱到達指定樓層時,需要在操控臺和吊箱內安裝聲音提示器,本系統使用蜂鳴器實現。通過分析,該系統需要PLC控制器11個輸入端子和11個輸出端子,具體I/O地址分配結果如表1所示。

表1 I/O地址分配表
2.2 PLC接線原理圖
根據系統控制要求和I/O地址分配,完成PLC硬件接線圖,如圖2所示。減速電機通過兩個中間繼電器的接線實現正反轉運行,再通過曳引繩帶動吊箱上升和下降。BCD數碼管的第4個數據引腳接電源負極,即邏輯狀態始終為0,第1~3個數據引腳分別接PLC的3個輸出點,實現數碼管1~5的數字顯示。

圖2 PLC硬件接線圖
3 軟件設計
3.1 程序程序設計
PLC程序設計是垂直貨梯的控制核心,主要包括緊急制動模式和正常運行模式。按下緊急停止開關,進入緊急制動模式,此時,紅色指示燈閃爍,蜂鳴器發出警示聲,吊箱停止運行,各控制按鈕失效。只有當緊急停止開關復位后,再次按下樓層請求按鈕,吊箱方可運行。在正常運行模式下,當吊箱運行時綠色指示燈常亮;當吊箱停止時綠色指示燈熄滅。當吊箱停止運行時,按下樓層請求按鈕,數碼管HL4顯示請求樓層號,控制器比較請求樓層號與吊箱所在樓層位置編號大小:若判斷結果為大于,吊箱開始上升;若結果為小于,吊箱開始下降;程序循環判斷,直到判斷結果為等于時,蜂鳴器響3 s,綠色指示燈熄滅,數碼管HL4顯示數字0,吊箱停止運行。正常運行模式下的程序流程圖和部分梯形圖如圖3、圖4所示。
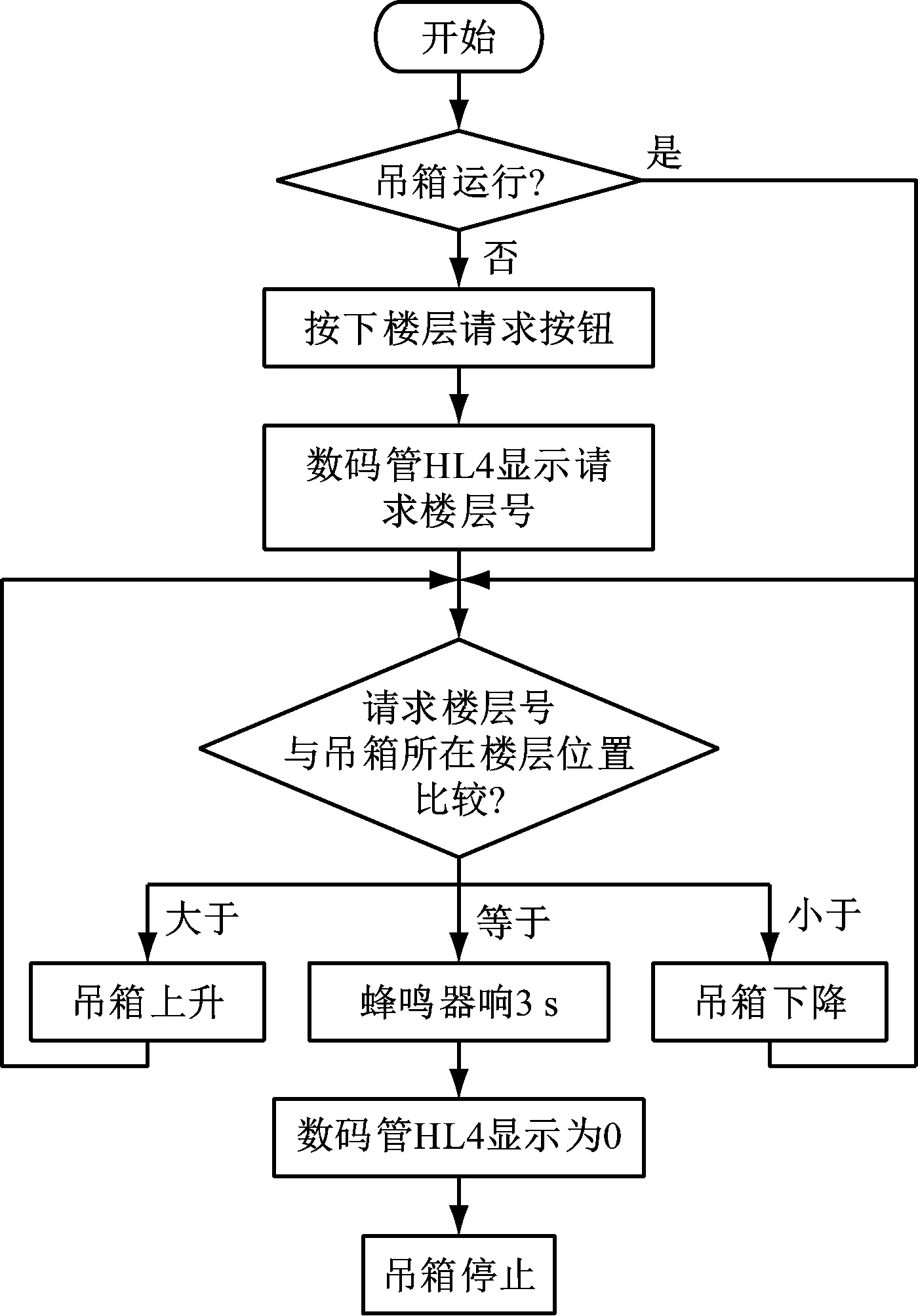
圖3 程序流程圖
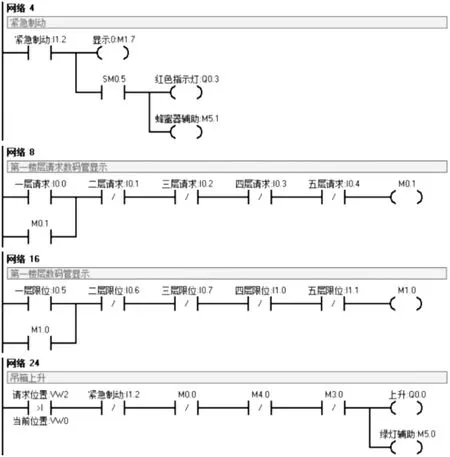
圖4 部分程序梯形圖
3.2 組態軟件設計
為了直觀顯示和控制垂直貨梯,制作了人機界面。該系統使用步科ET070觸摸屏實現上位機控制,故利用步科Kinco HMIware組態編輯軟件進行組態設計。首先在工程文件中選擇ET070觸摸屏和PLC S7-200設備,并進行通信連接和參數設置。然后進入組態窗口,開始繪制交互圖形界面。最后根據系統功能,定義組態變量設備地址和邏輯關系。組態界面如圖5所示。
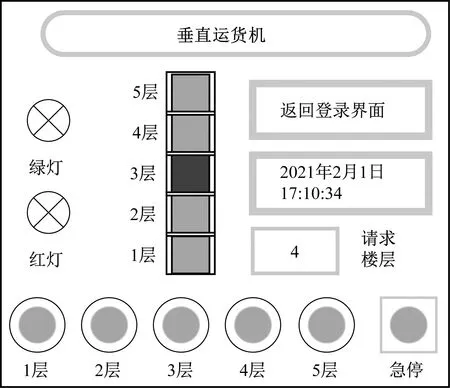
圖5 組態界面
4 系統測試
為了驗證系統的整體方案和軟硬件設計的可行性和正確性,制作了基于PLC的垂直貨梯實物模型,如圖6所示。

圖6 垂直貨梯簡易實物模型
將梯形圖程序下載到PLC中,通過設備實體按鍵和PLC編程軟件STEP 7內置的時序圖分析功能驗證程序編寫的正確性。PLC部分I/O軟元件的時序圖如圖7所示。開始,吊箱在1層等候,依次按下第2層~第5層請求按鈕,測試吊箱上升狀態;然后依次按下第4層~第1層請求按鈕,測試吊箱下降狀態;在第11.5 s時刻按下急停按鈕,測試吊箱運行狀態、紅燈閃爍警示、蜂鳴器發聲等效果。將組態工程文件下載到觸摸屏內,連接線路,通電、通信,再分別通過設備實體按鍵和觸摸屏,逐一測試在正常運行模式和緊急制動模式下,吊箱運行、數碼管顯示等實際工作效果。
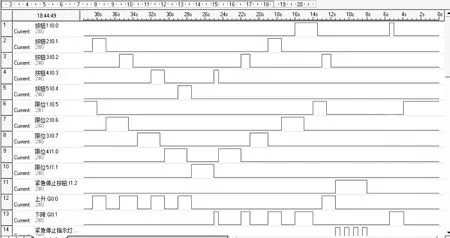
圖7 PLC部分I/O軟元件的時序圖
通過對設備的制作、程序調試、各項功能的測試,結果表明:基于PLC的垂直貨梯能夠實現吊箱的快速響應運行、準確停層,還可以實現緊急制動、聲光警示等功能;不僅可以通過實體按鈕的手動操控,還可以通過觸摸屏的人機界面實現貨梯的遠程控制和狀態實時顯示。
5 總結
從系統結構、控制要求、軟硬件設計、觸摸屏組態設計、實物模型制作、功能測試等方面闡述了基于PLC的垂直貨梯的設計過程。通過仿真測試和實物驗證,表明基于PLC、傳感器和組態控制技術的垂直貨梯能夠滿足倉庫、建筑物等環境的貨物垂直輸送,具有操作簡單、安全可靠、運行穩定等特點。
猜你喜歡
兒童故事畫報·發現號趣味百科(2025年8期)2025-08-23 00:00:00
青少年科技創新報(2024年23期)2024-07-12 00:00:00
中學生天地(A版)(2022年10期)2022-11-23 06:42:50
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
少年文藝·我愛寫作文(2017年6期)2017-06-12 23:21:56
Coco薇(2017年5期)2017-06-05 08:53:16
商業評論(2014年9期)2015-02-28 04:32:41
