TBM 隧洞橫向貫通誤差的仿真計算及應用
2022-09-01 15:11:26劉新峰
地理空間信息 2022年8期
劉新峰
(1. 新疆水利水電勘測設計研究院測繪工程院,新疆 昌吉 831100)
隨著TBM裝備制造技術的迅猛發展及掘進技術的不斷提高,TBM 的施工方法已運用到越來越多的超長、特長隧洞建設當中。我國正處于超長、特長隧洞建設的高峰期,目前正在施工建設的高黎貢山鐵路隧洞采用TBM 施工[1]。為保證工程質量,在隧洞開工建設之前,需對隧洞的貫通誤差進行估算,貫通誤差分為:橫向貫通誤差、縱向貫通誤差及豎向貫通誤差,其中橫向貫通誤差是垂直于隧道中線的水平方向誤差,洞內平面控制測量誤差是超長隧洞橫向貫通誤差的主要誤差來源[2],是制約隧道貫通的關鍵[3]。由于TBM 施工區段普遍較長且埋深較大,中間沒有支洞和通風豎井,其通風能力較弱,從而直接導致洞內粉塵及水霧在洞內聚集無法排出。因全站儀激光信號無法穿透較密集的粉塵和水霧,間接導致地下的控制點間距不宜布設太長,根據筆者目前所參與建設的TBM 隧洞,其地下控制點縱向間距普遍控制在200~300 m 左右。目前TBM 隧洞地下控制測量布網方式主要有2 種:交叉雙導線和全導線網,如圖1 所示。因此需解決的問題是如何估算2 種布網方式其控制點縱向間距為250 m的橫向貫通誤差。
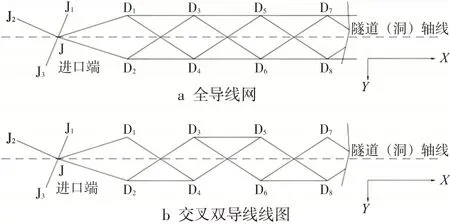
圖1 導線網示意圖
現行規范中給出了根據測角誤差、量邊誤差、導線組數求取橫向貫通中誤差的簡易公式,只能適用于單導線的橫向貫通測量誤差估算,不適用于這2 種布網方式,所以需要對這2 種布網方式對橫向貫通誤差的影響進行深入研究。本文利用仿真計算[4-5]和平差的方法分別求取了不同隧洞長度下2 種布網方式的橫向貫通誤差,分析控制點縱向間距布設為250 m 是否適合,同時比較兩者的優劣。因TBM隧道地下控制點的造埋方式是帶有強制對中標志的墩標,如圖2 所示,其遠離洞壁折光干擾,同時因為是強制對中,其對中誤差可以忽略不計,在仿真計算時不考慮對中誤差和折光影響,只考慮方向照準誤差及測距誤差。為進一步分析2 種布網方式的優劣,對北疆供水二期工程中一條長度約10 km的TBM隧洞進行導線測量實驗。通過仿真計算與現場實驗共同探索洞內2 種平面控制網的精度及擺動規律,并分析比較兩者的工作效率,其對TBM隧洞地下控制測量有著重大意義。

圖2 控制點造埋示意圖
1 橫向貫通誤差計算的簡易公式
《水利水電施工測量規范》SL52-2015[6]中規定,采用導線布設地面控制網時,橫向貫通中誤差可按公式(1)計算:

式中,mYβ為由測角誤差所產生的在貫通面上的橫向中誤差;mYL為由量邊誤差所產生的在貫通面上的橫向中誤差;mβ為導線測角中誤差;RXi、dYi為導線各點至貫通面的垂直距離和投影長度;為導線邊長相對中誤差;ng為導線組數。同時,該規范也規定了地下橫向貫通測量中誤差,如表1所示。

表1 地下橫向貫通測量中誤差
假設隧洞為TBM 獨頭單向掘進的直線隧洞,其mYL可以忽略不計[7],導線點縱向間距為250 m,根據公式1 計算出不同隧洞長度,不同導線組數的橫向貫通中誤差,如表2 所示。由于規范中橫向貫通中誤差對應的是雙向開挖的隧洞,假設隧道貫通面位于中間,可根據誤差傳播定律求取單向開挖隧洞的橫向貫通中誤差允許值。其中MYg為橫向貫通中誤差,MYj、MYc分別為隧洞進出口推算至貫通面的橫向貫通中誤差,所以單向掘進隧洞允許橫向貫通中誤差的計算公式為:。由計算結果表明,單組導線中誤差都超過允許中誤差,不能用于特長、超長隧洞控制測量;雙組導線可以用長度5 km內隧洞;3組導線可適用于長度10 km內的隧洞,4組導線可適用于長度25 km 內隧洞,但工作量較大,不建議使用。交叉雙導線和全導線網其導線組數不能確定,所以該公式不能用于兩者的隧洞橫向貫通中誤差計算。

表2 250 m控制點間距下的地下橫向貫通中誤差計算
2 地下橫向貫通中誤差的仿真計算
目前TBM隧洞地下控制測量普遍采用的儀器其標稱精度為方向觀測0.5″,測距精度1+1 PPM 的智能全站儀。若按照規范[6]的二等導線進行觀測,其測回數為6 次。水平觀測誤差及測距誤差為偶然誤差,其服從正態分布規律。所以每個方向觀測值上添加上服從N(0,0.52)分布的水平方向測量誤差。測距誤差又分為固定誤差和比例誤差,每個距離觀測值上添加隨機概率相同區間在[-1,1]之間的固定誤差及服從N(0,1)的比例誤差。分別取其6次結果的平均數作為該測站的方向觀測值和距離觀測值。由于控制點為帶有強制對中標志的墩標,其遠離洞壁折光干擾,在仿真模擬計算時可以忽略大氣旁折光及對中誤差的影響。建立仿真計算的模擬坐標系,X軸平行于隧洞掘進方向,Y軸平行于貫通面,一側控制點落于Y軸上,假定洞內控制點的縱向間距為250 m、以雙排控制點繪制在坐標系中,如圖3 所示。根據仿真模擬的觀測數據分別建立交叉雙導線和全導線網的觀測文件,利用武漢大學開發的科傻地面控制網數據處理軟件進行平差,平差結果中控制點的X坐標即是橫向貫通誤差。統計分別模擬了10次的結果見表3、4。
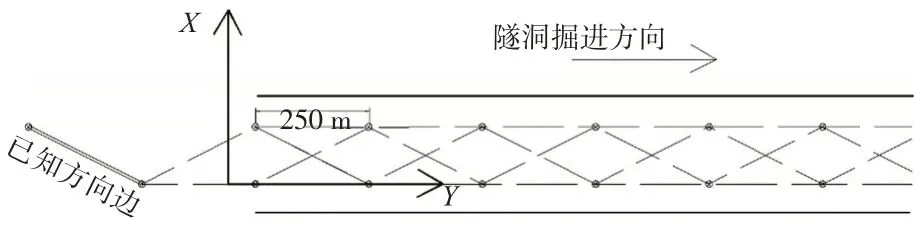
圖3 隧洞虛擬坐標系示意圖
由表3、4 可知,根據10 次模擬數據求取的橫向貫通中誤差,其結果均小于允許中誤差,若以2 倍中誤差作為橫向貫通誤差估算值,其結果也小于極限橫向貫通誤差,同時控制點縱向間距為250 m 的2 種布網方式10次模擬平差所得橫向貫通誤差均小于極限橫向貫通誤差,說明控制點縱向間距布設成250 m 可行,2 種布網方式都適用于超長隧洞的控制測量。兩者的中誤差無明顯差異,說明全導線網相對于交叉雙導線網,對控制橫向貫通誤差上效果上并不顯著。相較于工作效率,交叉雙導線的施測方法更具有優勢。
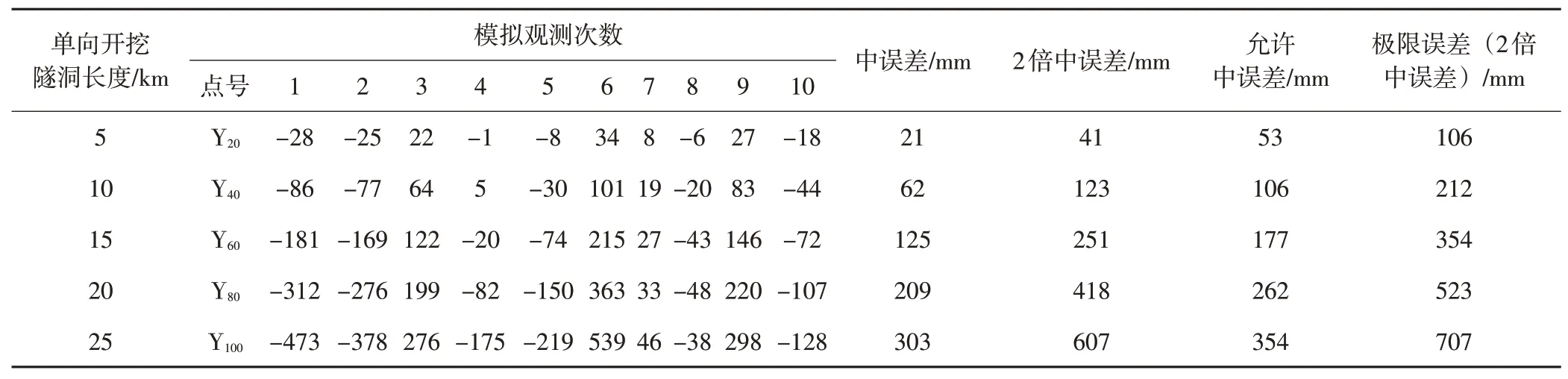
表3 交叉雙導線模擬橫向貫通誤差計算結果
3 實驗對比分析
北疆供水二期工程一條10.2 km 的單向開挖直線隧洞,前1 km 采用鉆爆法施工,后9 km 采用TBM 施工,TBM刀頭直徑為7.8 m。洞內控制點帶有強制對中標志的墩標,其縱向間距為250 m 左右,成對布設。使用徠卡TS60 智能全站儀標稱精度(0.5″、1+1PPM)和徠卡TS50 智能全站儀標稱精度(0.5″、1+1PPM)按交叉雙導線和全導線網分別進行兩次獨立的導線觀測。測回數均為6 次,其外業數據均滿足規范要求,環線閉合差都小于2n[6],n為構成閉合環邊的個數。采用科傻地面控制網數據處理軟件對數據進行平差,其最弱點精度及后驗單位權中誤差如表5所示。由表5可知,通過交叉雙導線和全導線網方式求得距貫通面最后一個點T87(最弱點),X坐標差1.4 cm,Y坐標差0.4 cm,如果換算到貫通面方向,橫向差值僅僅為0.2 cm。通過對最弱點的精度進行比較,全導線網相對于交叉雙導有略線優勢,但優勢不明顯,其精度無明顯提高,也驗證了模擬計算的結論。根據徠卡TS60智能全站儀的觀測時間統計,交叉雙導線網和全導線網單站6 測回用時分別為5 min 和7 min、30 s,其效率提高了1/3。TBM 施工期間階段,給地下導線控制測量所預留的時間較為有限,所以結合精度和效率來看,交叉雙導線網更適合TBM 施工階段的地下控制測量工作。在隧洞快貫通時,會給測量預留較為充足的時間,此時可以采用全導線網進行控制測量復核,以達到雙保險的目的,保證隧洞精準貫通。該隧洞采用上述方法已順利貫通,其橫向貫通誤差為2.6 cm。
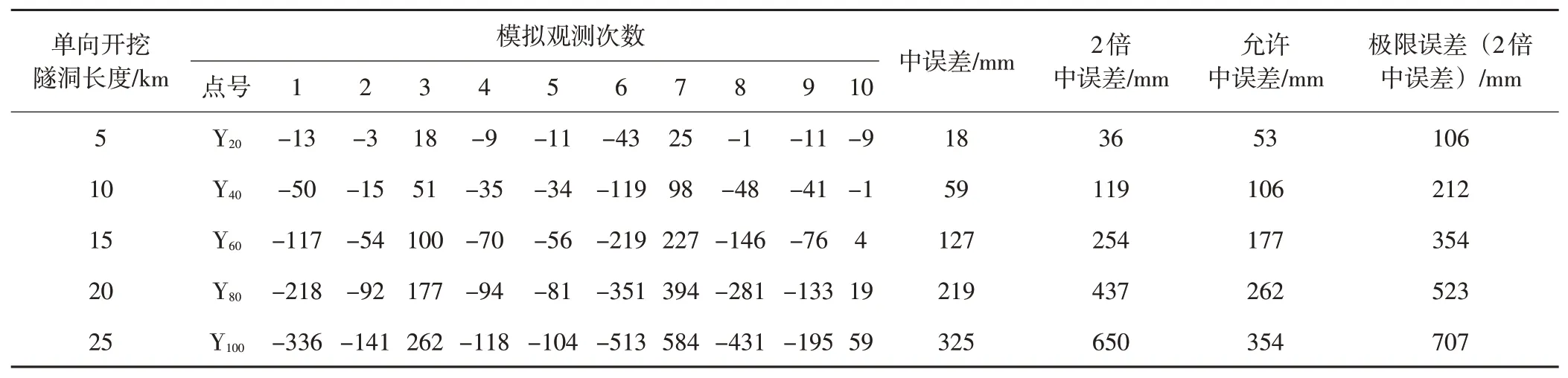
表4 全導線網模擬橫向貫通誤差計算結果

表5 最弱點精度及后驗單位權中誤差
4 結 論
目前TBM隧洞地下控制測量布網方式多采用交叉雙導線網和全導線網,現行規范沒有規定其橫向貫通誤差該如何估算,所以對兩者如何求取橫向貫通誤差是有待解決的問題。同時由于TBM 隧洞特殊的測量環境,其控制點縱向間距不宜過長,一般控制在250 m左右,其是否能滿足貫通的精度要求。筆者通過仿真計算與平差的方法驗證了控制點縱向間距250 m 的2 種布網方法都可滿足規范允許誤差要求,同時兩者在精度上差異不顯著。觀測時間上全導線網觀測用時比交叉雙導線網要多出2/3 倍,后者更適合TBM施工階段的地下控制測量工作。
猜你喜歡
建材發展導向(2022年10期)2022-07-28 03:04:36
建材發展導向(2021年18期)2021-11-05 09:19:50
建材發展導向(2021年9期)2021-07-16 07:11:36
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
中國房地產業(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34