多源干擾下運載器精細抗干擾容錯姿態控制
2022-09-09 01:50:12王智慧喬建忠王陳亮
航天控制 2022年4期
滕 昊 王智慧 陳 昌 喬建忠 王陳亮
1.北京航空航天大學自動化科學與電氣工程學院,北京 100191 2.北京航天自動控制研究所,北京 100854
0 引言
隨著科學技術的飛速發展,運載器執行的任務更加復雜多樣,控制難度逐漸增加,尤其是運載器的姿態控制。對于運載器姿態控制,現有許多基礎控制技術已被廣泛應用,如滑模控制[1]、自適應控制[2]、魯棒控制[3]以及智能控制[4]等。另外,基于干擾觀測器的控制方法[5-7],因其能夠有效處理干擾問題,也已經越來越多地應用到運載器姿態控制之中。
運載器執行一般任務包含主動段、姿態調整段、平飛段、再入段以及水平著陸段等飛行階段。以再入飛行段為例,運載器需要從高空下降,在這一階段,運載器的高度、速度以及姿態角變化非常復雜。且由于運載器本身的機械結構特性,在高速飛行時會產生較強的彈性振動影響,外部環境干擾也嚴重影響運載器的飛行方向,同時運載器的姿態控制系統也存在模型不確定性等[8-9],這些多源異質干擾給運載器姿態控制帶來了巨大的挑戰。運載器姿態控制系統固有的強耦合、強非線性、多通道不確定性的特征,進一步增加了控制的難度。為了有效處理干擾,可利用PID、滑模等算法本身的魯棒性對干擾進行抑制,如文獻[10]提出了自適應高階超螺旋控制算法,能夠有效提高響應速度,增強魯棒性,還能夠抑制抖振。另外,基于觀測器的控制方法,可以有效對干擾進行估計,然后通過控制器設計進行補償或抑制等。這些方法已經取得了較好的應用,但是運載器在實際飛行過程中,受到的干擾是多源、異質甚至是異構的,將干擾作為“單一”項進行處理,犧牲了控制精度。所以,對于多源干擾的研究,現已越來越成為熱點問題。
另一方面,運載器在這一階段飛行范圍大,環境惡劣多變,且跨越從高速到低速,高空到低空的劇烈變化過程,受到高動壓、高加熱率等因素的影響,導致執行機構在飛行過程中容易出現效能下降、漂移等故障,并與干擾項耦合,嚴重影響運載器姿態控制系統安全性與穩定性。針對故障問題,文獻[11]在考慮了未知方向故障、模型不確定性以及外部環境干擾的情況下,設計了一種神經網絡容錯控制,通過神經網絡保證了故障狀態下的控制精度,提高了系統魯棒性;文獻[12]針對運載器執行機構效能下降的情況,設計了模糊控制規則使得氣動舵面與RCS相互配合補充效能降低的力矩損失,保證了故障情況下的控制精度與穩定性;還可利用迭代學習觀測器估計驅動效率,然后重構控制器對效能進行補償[13]等方法,均達到了一定的效果,然而運載器在再入段受到故障與干擾的同時作用,具有強耦合的特征,要保證運載器的穩定性與精確性,為控制系統設計提出了更高的要求,增加了問題的復雜性與難度。
因此,針對運載器在再入飛行階段的姿態控制問題,考慮執行機構故障,同時考慮運載器在飛行過程中受到來自內部彈性振動干擾、外部環境干擾以及模型不確定、參數攝動等多源干擾的影響,為提高運載器的抗干擾容錯能力,并保證控制精度,我們基于復合分層抗干擾控制框架,結合強抗擾控制理論[14-15],提出一種精細化抗干擾容錯姿態控制方法(Refined anti-disturbance fault-tolerant control,RADFTC),設計控制系統框圖如圖1。
如圖1所示,建立包含故障與多源干擾的姿態控制模型,并進行數學變換與合并;針對運動學中的非匹配模型不確定及其特性設計干擾觀測器進行估計;針對來自內部的彈性振動干擾,利用部分已知信息對干擾建模,通過干擾觀測器進行估計;針對執行機構退化、漂移故障以及外部環境干擾、參數攝動,利用擴張狀態觀測器進行估計;最后基于動態面控制,設計具有干擾補償的抗干擾容錯控制律,保證運載器飛行的安全性、穩定性與精確性。

圖1 精細抗干擾容錯姿態控制框圖
1 問題描述
為準確描述運載器在再入段的飛行姿態,選取攻角α、側滑角β以及傾斜角σ表示運載器的姿態角,平動方程、標稱運動學與動力學方程可見文獻[1]和[16]所示。根據運載器在再入飛行階段的飛行特性做如下假設:
假設1:忽略運載器的經度變化率。
假設2:地球自轉角速度約為0.00007272(rad/s),可忽略。
考慮執行機構退化與漂移故障、模型不確定、參數攝動、彈性振動干擾、外部環境干擾等,建立模型如下:
(1)
式中,Ω=[α,β,σ]T表示姿態角向量;R表示旋轉矩陣,具體可表達為:

(2)
ω∈3表示三軸角速度;u∈3表示控制輸入力矩,f∈3表示退化或漂移引起的故障;J∈3×3表示轉動慣量,可表示為:
(3)
ΔM表示模型不確定項,具體表達如下;
(4)

(5)


則dv可表示為如下模型形式:

(6)

令d2=J-1dv,則
(7)
式中,S=J-1Sv為已知系數矩陣。


基于上述分析,式(1)可重寫為:

(8)
2 精細抗干擾容錯姿態控制系統設計
2.1 觀測器設計
針對運載器再入段運動學中的d1,故構造如下干擾觀測器:

(9)


(10)
且有
(11)
(12)

(13)

定義V0=εTHε,對V0求導可得:
(14)
式中,根據Young不等式以及ζ0≥1性質,有
所以式(14)可進一步寫為:
(15)

(16)
另外,基于彈性振動干擾d2模型(7),我們構造如下干擾觀測器:
(17)


(18)
針對執行機構故障等不可建模干擾項d3,構造如下擴張狀態觀測器:

(19)
式中,L31和L32為大于0的觀測器增益。

(20)
以及
(21)

(22)

結合式(18)和(22),可以看出DO與ESO相互耦合,聯立可得:
(23)
式中,B4=[0I]。
基于此,我們給出如下引理:
引理1:對于式(23),若存在正定對稱矩陣P=PT>0以及Q=QT>0使得如下線性矩陣不等式成立:
(24)



(25)
根據Young不等式,
(26)

(27)
式中,
(28)

(29)
由Schur補引理Ξ2<0與Ξ0<0等價。證畢。
2.2 控制器設計
定義z1=Ω-Ωd,則
(30)
(31)

根據Young不等式,
(32)
代入式(31),可得
(33)
設計虛擬控制信號ωd動態補償非匹配項d1:
(34)
式中,c1>0表示待設計控制參數;lY>0為一常數。

(35)
為避免強非線性求導問題,令ωd通過時間常數為τ的一階低通濾波器
(36)

定義z2=ω-w,Y=w-ωd則
(37)
(38)


(39)
根據Young不等式,



(40)
(41)
(42)
式中,b1和b2為大于0的常數。
連續函數η在Θ1×Θ2上有范數最大值,記為M,且對于任意大于0的常數lη,有
(43)
進而可得
(44)
設計RADFTC控制律為:

(45)
所以
(46)
2.3 穩定性分析
我們給出如下定理:

證明:

(47)

此外,
(48)
3 仿真驗證
以一質量為6165kg的運載器在初始高度為25000m的大氣層再入下降為例進行仿真驗證,轉動慣量矩陣J由文獻[1]給出:

初始姿態角Ω(0)=[19.5°,1.05°,-0.98°]Τ,初始角速度ω(0)=[0,0,0]Τrad/s。
彈性振動引起的干擾d2設為:
(49)
其中,d2中的振動頻率ωv=2為已知量。
外部環境等其他干擾設置為:
(50)
設故障表達式為:
L11=40.9805,L12=47.0033

控制參數選取c1=0.1,c2=20.1919。目標姿態角設為Ωd=[15°,0°,0°]Τ。仿真結果如圖2~7所示。

圖2 三軸姿態角跟蹤誤差z1

圖3 d1的估計效果
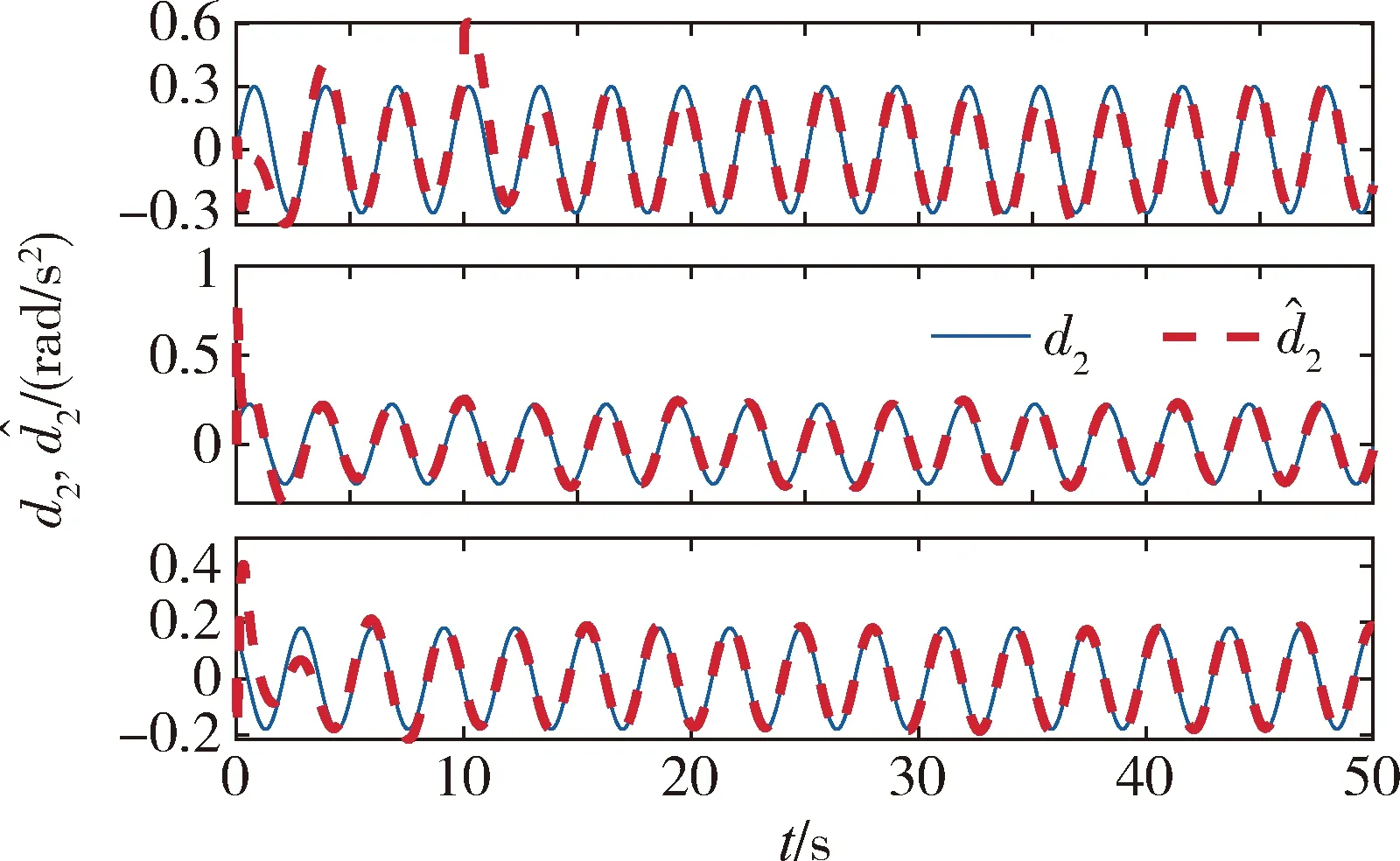
圖4 彈性模態振動干擾d2估計效果

圖5 d3估計效果

圖6 執行機構輸出力矩
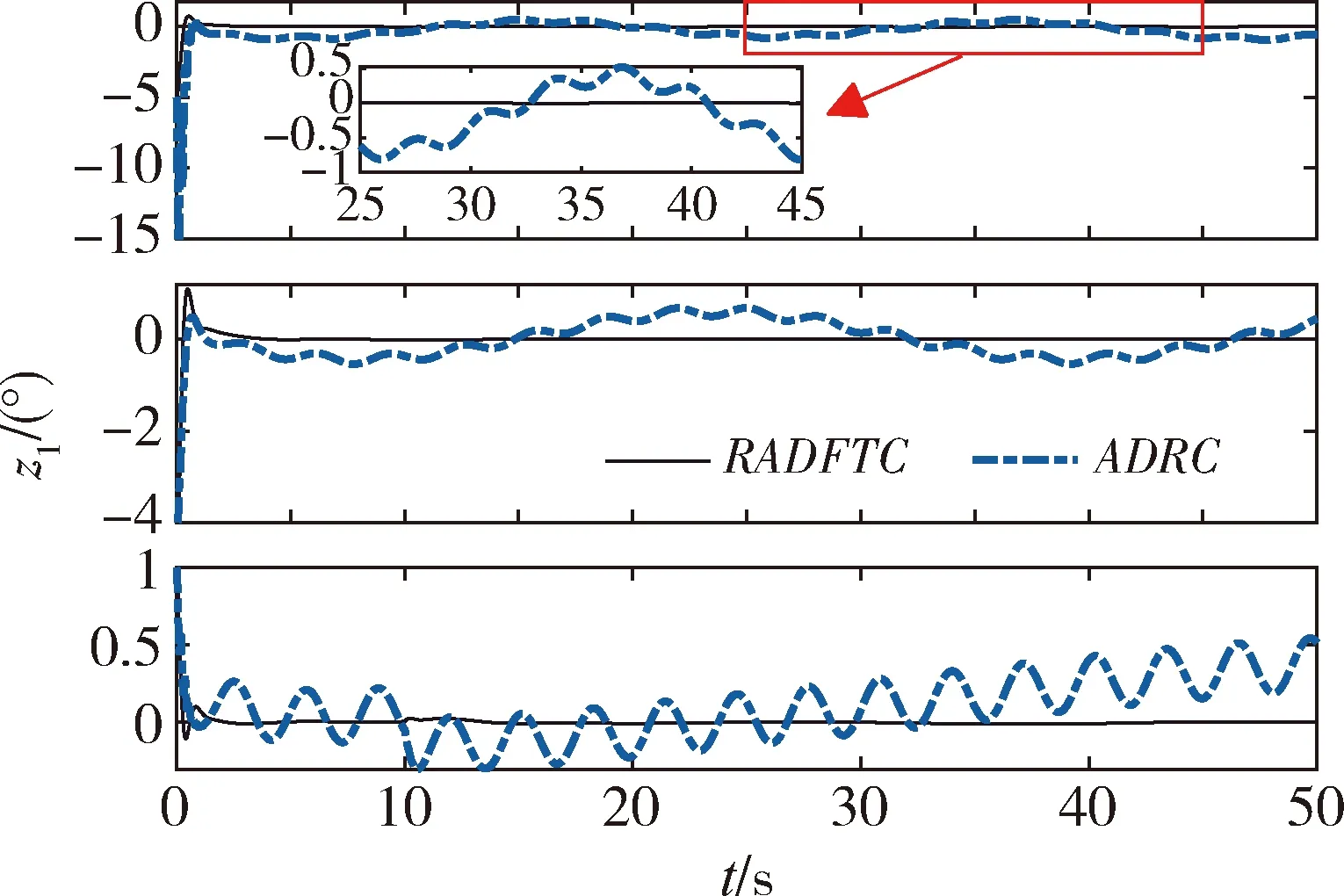
圖7 仿真效果對比圖
根據仿真結果,可以觀察出,所設計的控制方法可使運載器的姿態跟蹤誤差在5s左右收斂至較小的有限集內。在10s后存在漂移以及退化故障且受到彈性振動以及外部環境等干擾的影響時,系統仍然能夠保證收斂性,具有較高的魯棒性與控制精度。
針對非匹配的模型不確定d1所設計的干擾觀測器式(9)在4s左右能跟蹤上設定的干擾信號;針對彈性模態振動干擾d2設計的干擾觀測器(17)也可以在3s左右跟蹤上真實值,即使在10s、30s出現故障時,也能夠快速跟蹤上實際信號;針對故障信號以及外部環境等集總干擾d3所設計的擴張狀態觀測器式(19)同樣能夠保證跟蹤的準確性,即使在故障出現時,也能夠保證在較短的時間內跟蹤上真實信號。從而驗證了所設計觀測器的有效性與可靠性。
最后與自抗擾控制(ADRC)方法進行對比,ADRC觀測器與控制器設計分別如下:
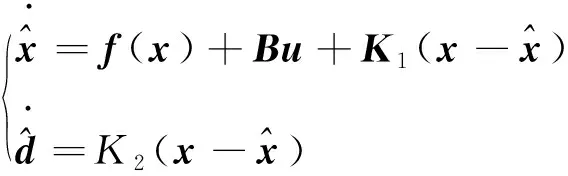
(52)
(53)
式中,x=[Ω,ω]Τ,f(x)=[Rω,-J-1ω×Jω]Τ,B=[03,I3]Τ,d=[d1,d2+d3]Τ。通過極點配置法設置觀測器參數K1=90,K2=2700。同時保證與所設計精細化抗干擾容錯控制(RADFTC)方法姿態的上升時間相同,取控制增益為K3=100.32,K2=19.99。
跟蹤誤差的仿真結果可以看出,自抗擾控制方法在同等條件下的控制精度相對較差,且存在波動,而RADFTC方法,可以快速達到期望值,且跟蹤精度較高,平滑性與穩定性較好。
綜上,所設計的RADFTC方法在干擾、故障同時存在的復雜情況下,仍可以保證運載器姿態跟蹤的精度,具有高精度、強魯棒性等特征。
4 結論
針對運載器在再入飛行段存在故障與多源干擾情況下的姿態控制問題,基于復合分層抗干擾控制理論,設計了一種干擾觀測器,準確估計運動學中的模型不確定。設計了干擾觀測器準確估計彈性模態振動干擾,設計了擴張狀態觀測器,準確估計故障以及集總干擾。基于動態面控制,對非匹配的模型不確定項設計虛擬控制信號進行動態補償,對故障與多源干擾設計了精細抗干擾容錯姿態控制器進行補償。通過仿真可以看出,所設計控制器在故障、多源干擾同時存在的情況下,仍能夠保證姿態的高精度跟蹤,具有較強的抗干擾與容錯能力。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
數學物理學報(2017年6期)2018-01-22 02:26:40
光學精密工程(2016年6期)2016-11-07 09:07:19
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50